






 physics
physicsSimilar presentations:







")


Векторное поле и его объемные производные. Лекция 2
1. Векторное поле и его объемные производные
Лекция 22. План лекции
• Векторное поле, дивергенция, ротор.• Физический смысл дивергенции
векторного поля.
3.
• Векторным полем называется частьпространства, каждой точке которого
соответствует значение некоторой
векторной функции .
• При этом вектор – в каждой точке данного
пространства имеет определенное направление и
значение, а поле изображается с помощью
векторных линий, нормальных и векторных
поверхностей.
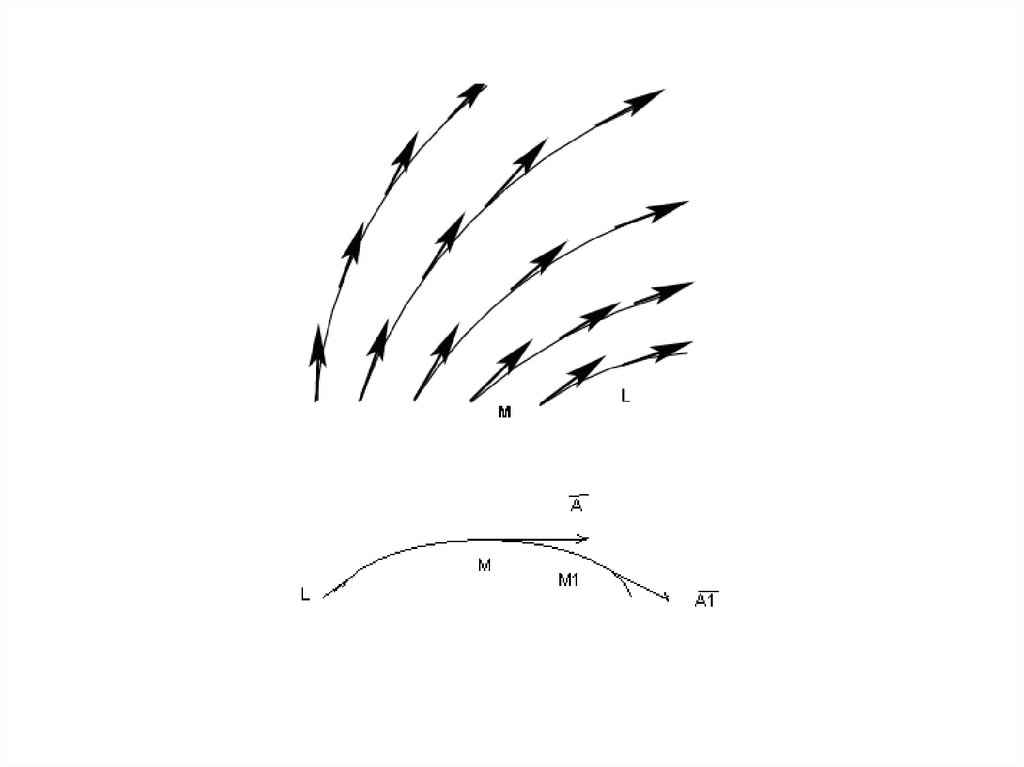
• Векторной линией называется кривая l, в каждой
точке которой касательная имеет направление вектора
поля. Через каждую точку (М) проходит одна
определенная линия.
4.
5.
• Семейством векторных линийопределяется семейство
ортогональных к ним поверхностей,
которые называются нормальными
поверхностями поля.
• Совокупность линий, проведенных
параллельно векторам поля через все
точки линии l, образует векторную
поверхность.
6. Векторная трубка
Если l замкнутая линия, то векторнаяповерхность ограничивает некоторую часть
пространства, называемую векторной
трубкой. В силовом поле их называют
силовыми линиями и силовыми трубками.
7.
• Быстрота изменения векторнойпеременной в окрестности точки М
определяется производной этой функции
по векторному аргументу (r).
• Производная векторной переменной по
производному направлению l
определяется как в случае скалярного
поля, в виде:
a
al a0
lim
(1)
l l 0 l
al
и
a0
значения
функции
а
в
точке
М
и
Мl
8.
• Из (1) следует, что производная aвеличина векторная и для
l
другого направления, проведенного через
точку М, получим другой вектор.
• Для описания векторного поля в
пространстве достаточно рассмотреть
производные по трем взаимно
перпендикулярным направлениям:
a
;
x
a
;
y
a
z
9.
• В действительности вектор a r имеет трискалярных проекций на осях координат ( ax, ay,
az ) , и они образуют скалярные поля.
• Поэтому данному векторному полю можно
сопоставить совокупность трех скалярных
полей ax (x, y, z), ay (x, y, z), az (x, y, z),
поведение которых определяются тремя
градиентами
a x , a y , a z
(2)
• Тогда векторное поле определяется тремя
векторными величинами, являющимися
векторными составляющими более сложной
величины, называемой тензором.
10.
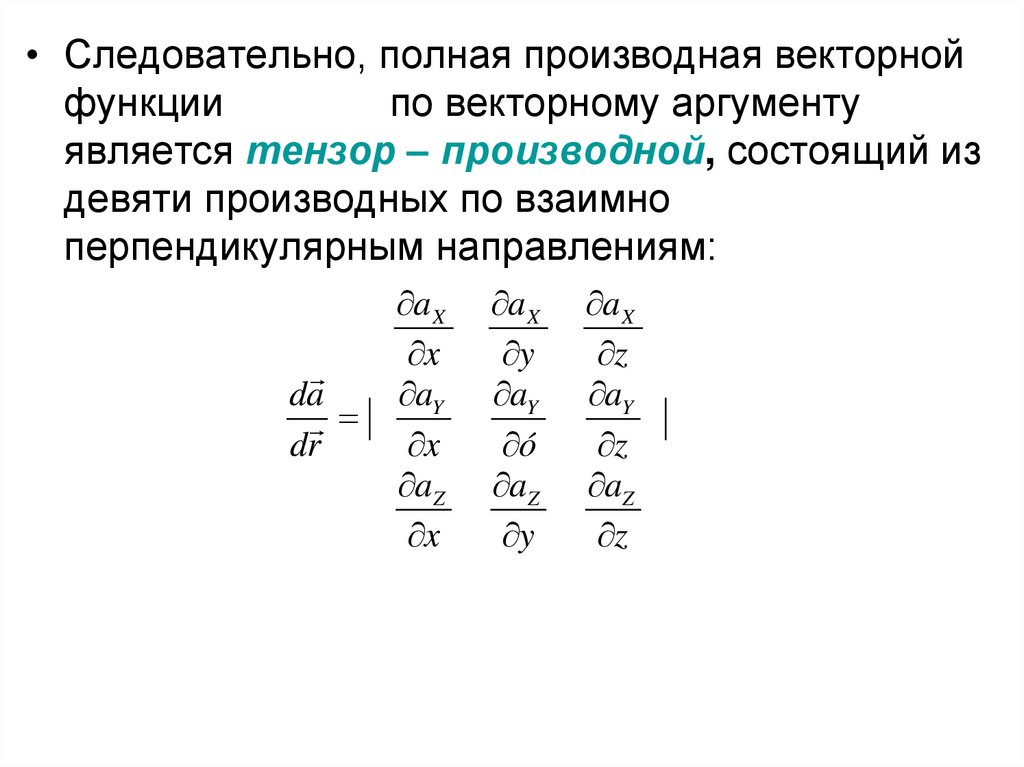
• Следовательно, полная производная векторнойфункции
по векторному аргументу
является тензор – производной, состоящий из
девяти производных по взаимно
перпендикулярным направлениям:
da
dr
a X
x
aY
x
aZ
x
a X
y
aY
ó
aZ
y
a X
z
aY
z
aZ
z
11.
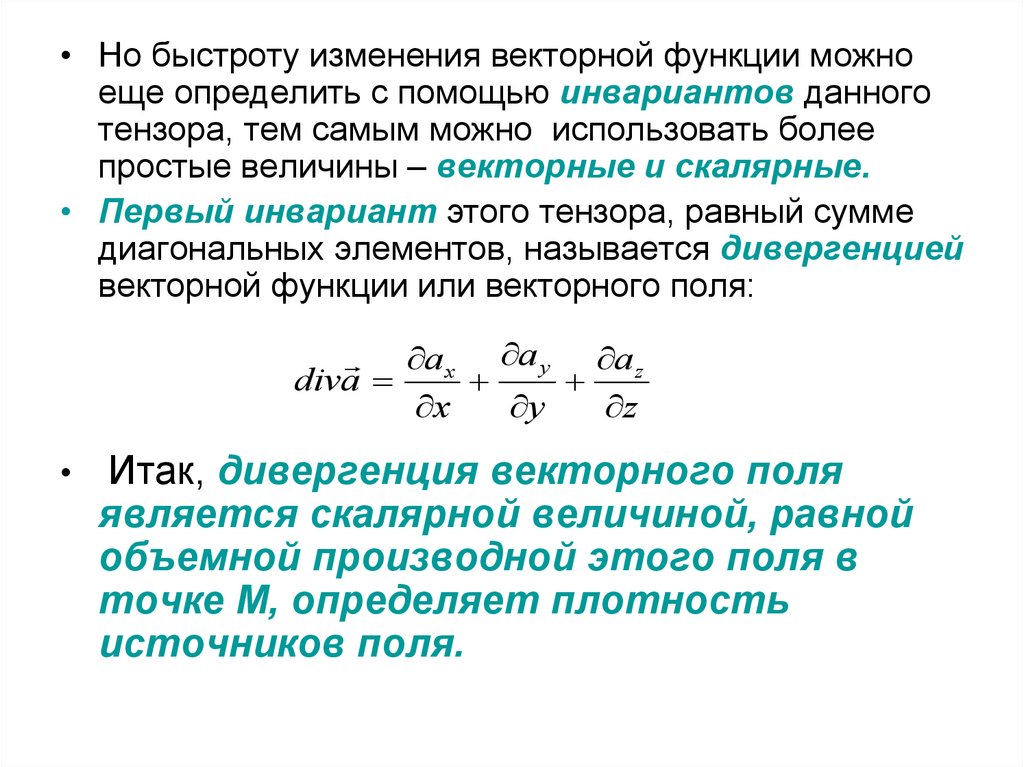
• Но быстроту изменения векторной функции можноеще определить с помощью инвариантов данного
тензора, тем самым можно использовать более
простые величины – векторные и скалярные.
• Первый инвариант этого тензора, равный сумме
диагональных элементов, называется дивергенцией
векторной функции или векторного поля:
ax a y az
diva
x
y
z
Итак, дивергенция векторного поля
является скалярной величиной, равной
объемной производной этого поля в
точке М, определяет плотность
источников поля.
12. Векторные линии положительных и отрицательных зарядов
13.
• Второй инвариант тензорапроизводной определяется разложением
этого тензора на симметричную и
антисимметричную части:
da
S A
dr
14.
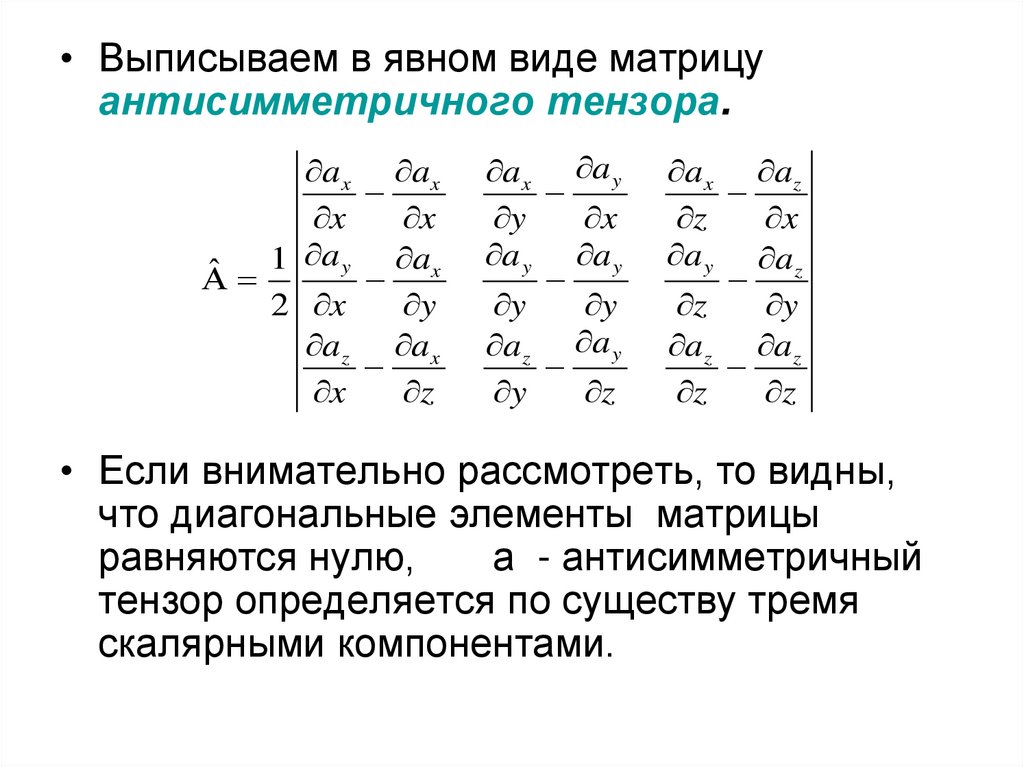
• Выписываем в явном виде матрицуантисимметричного тензора.
ax ax
x
x
1 a y ax
ˆ
2 x
y
az ax
x
z
ax a y
y
x
a y a y
y
y
az a y
y
z
ax az
z
x
a y az
z
y
az az
z
z
• Если внимательно рассмотреть, то видны,
что диагональные элементы матрицы
равняются нулю,
а - антисимметричный
тензор определяется по существу тремя
скалярными компонентами.
15.
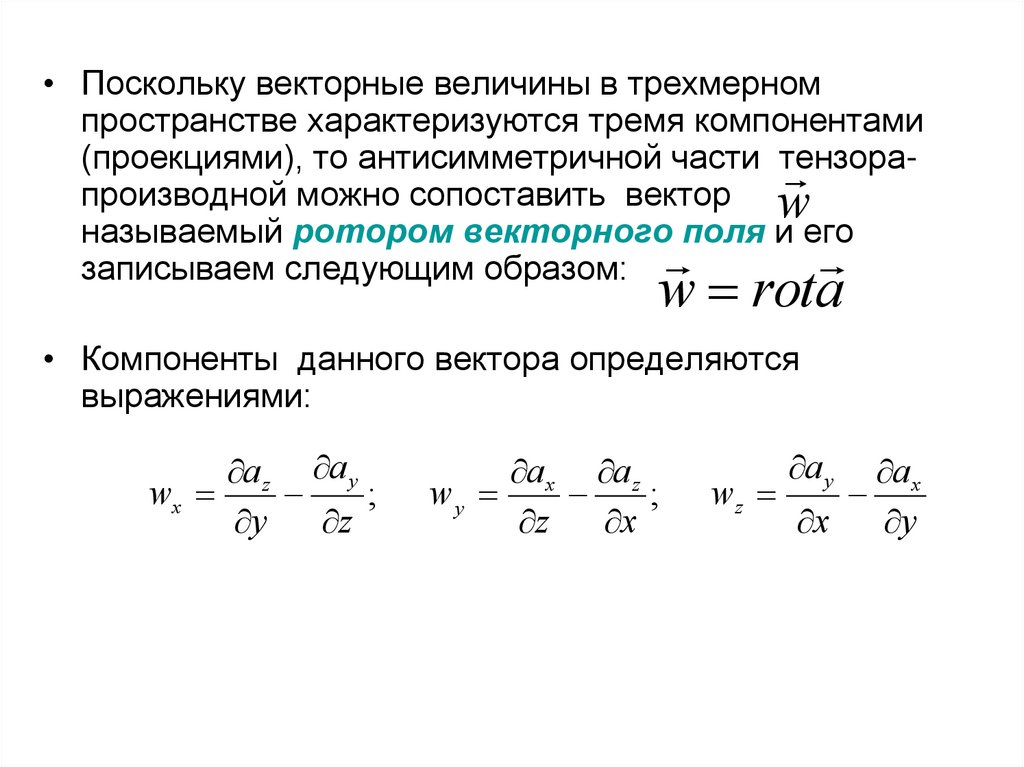
• Поскольку векторные величины в трехмерномпространстве характеризуются тремя компонентами
(проекциями), то антисимметричной части тензора
производной можно сопоставить вектор w
называемый ротором векторного поля и его
записываем следующим образом:
w rota
• Компоненты данного вектора определяются
выражениями:
az a y
wx
;
y
z
ax az
wy
;
z
x
a y
ax
wz
x
y
16.
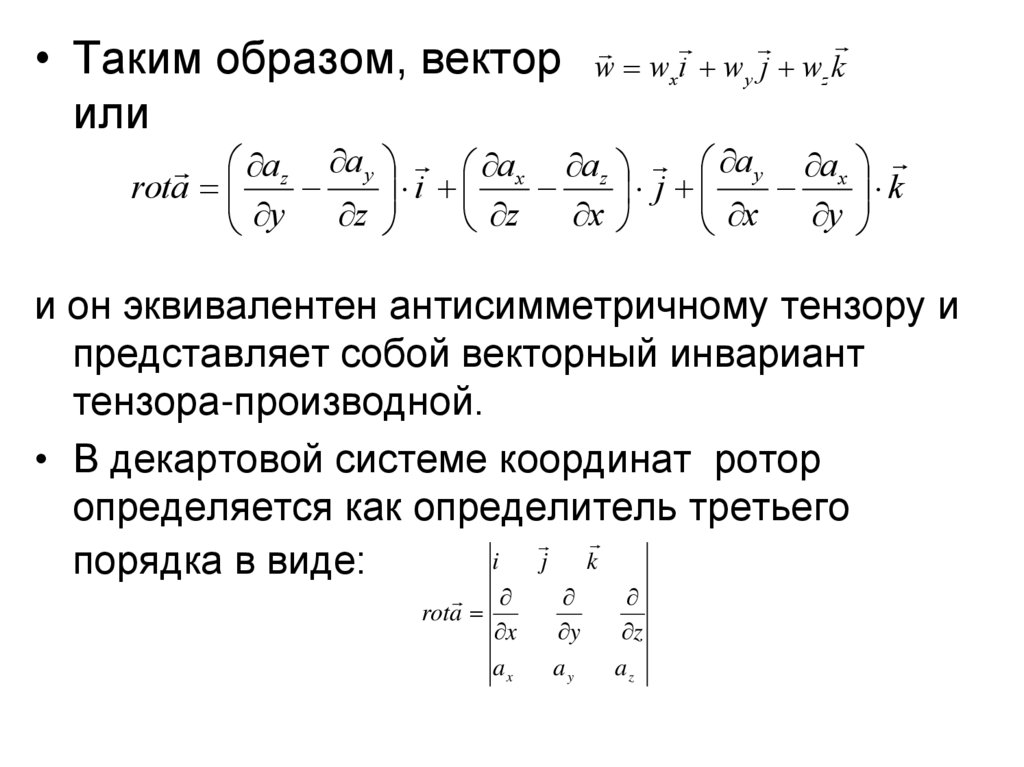
• Таким образом, векторили
w wx i wy j wz k
az a y ax az a y ax
i
k
rota
j
z
x
y
z
y
x
и он эквивалентен антисимметричному тензору и
представляет собой векторный инвариант
тензора-производной.
• В декартовой системе координат ротор
определяется как определитель третьего
i
j
k
порядка в виде:
rota
x
ax
y
ay
z
az
17.
• Итак, ротор векторного поля - естьвектор, определенный в каждой точке поля и
является объемной производной векторной
переменной, взятый с обратным знаком.
Направление вектора всегда
перпендикулярно к плоскости векторного
поля (поверхности).
• Совокупность двух величин – скаляра diva
и rota
вектора - являющихся
инвариантами (2) тензора – производной,
может служить дифференциальной
характеристикой векторного поля
.
Каждая из этих величин имеет определенный
физический и геометрический смысл.
18.
• Физический смысл дивергенциивекторного поля.
• Дивергенцию иногда заменяют термином
«расходимость», который относиться к
гидродинамике.
• В случае, когда рассматриваемое поле
постоянное во времени, то его можно
изобразить с помощью векторных линий.
Как известно, векторные линий
расходятся из источников и сходятся в
стоках, оттуда и замена дивергенции на
термин «расходимость».
19.
• Данное понимание, хотя, формальное,но позволяет решить важные задачи
теории поля.
• Допустим, из замкнутой области
вытекает больше воды, чем втекает в
нее, в этом случае говорят о наличии
источников внутри этой области,
увеличивающих количество воды, т.е.
положительные источники там, где
векторные линии начинаются, откуда
они расходятся.
20.
• Итак, дивергенция векторного поля даетинформацию о существовании
источников и стоков векторных полей в
рассматриваемой области.
• diva 0
- означает, что нет
источников поля.
• diva 0
- существует источник
векторного поля, из него расходятся
векторные линии.
• diva 0
- существует сток
векторного поля, векторные линии
сходятся в него.
21. Контрольные вопросы
• Определение векторного поля.• Что называется векторной линией?
• Как определяется скорость изменения
векторной функции?
• Что называется дивергенцией векторного
поля?
• Что называется ротором векторного поля?
• Что такой векторный поток?