

; 2. Информационные (исследовательские), предназначенные для сбора")
; · 3 сервомотора: два для")


 programming
programmingSimilar presentations:










Поисковый роботизированный комплекс «Спасатель»
1. «Поисковый роботизированный комплекс «Спасатель»
«ПОИСКОВЫЙРОБОТИЗИРОВАННЫЙ
КОМПЛЕКС «СПАСАТЕЛЬ»
Тетерев Роман
Ершов Артем
Ижевск 2023
2.
«Робот не может причинить вред человеку или своим бездействиемдопустить, чтобы человеку был причинён вред.
Робот должен повиноваться всем приказам, которые даёт человек,
кроме тех случаев, когда эти приказы противоречат Первому Закону.
Робот должен заботиться о своей безопасности в той мере, в
которой это не противоречит Первому или Второму Законам.»
3. Для достижения цели были поставлены следующие задачи: · Изучить основные принципы построения робототехнических систем; ·
Цели и задачи данного проекта:Разработать модель поискового робототехнического
комплекса (далее Робот) «Спасатель» с описанием тактикотехнических характеристик и его предназначения.
ДЛЯ ДОСТИЖЕНИЯ ЦЕЛИ БЫЛИ ПОСТАВЛЕНЫ СЛЕДУЮЩИЕ ЗАДАЧИ:
· ИЗУЧИТЬ ОСНОВНЫЕ ПРИНЦИПЫ ПОСТРОЕНИЯ РОБОТОТЕХНИЧЕСКИХ СИСТЕМ;
· ВЫВЕСТИ ОСНОВНЫЕ ТАКТИКО-ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ, КОТОРЫМ ДОЛЖЕН
СООТВЕТСТВОВАТЬ РОБОТ «СПАСАТЕЛЬ»;
· ОБОЗНАЧИТЬ ВОЗМОЖНЫЕ ПУТИ МОДЕРНИЗАЦИИ;
· СОЗДАТЬ ДЕЙСТВУЮЩУЮ МОДЕЛЬ РОБОТА С УЧЕТОМ ТРЕБОВАНИЙ;
4. Классификация Роботов: 1. Человекоподобные (бытовые); 2. Информационные (исследовательские), предназначенные для сбора
Принцип построения робототехнических системПри создании робота необходимо не только разработка
исполнительной части, но и программное обеспечение, без
которого робот не может функционировать.
КЛАССИФИКАЦИЯ РОБОТОВ:
1. ЧЕЛОВЕКОПОДОБНЫЕ (БЫТОВЫЕ);
2. ИНФОРМАЦИОННЫЕ (ИССЛЕДОВАТЕЛЬСКИЕ), ПРЕДНАЗНАЧЕННЫЕ ДЛЯ СБОРА ИНФОРМАЦИИ В
СРЕДАХ ОПАСНЫХ ИЛИ НЕДОСТУПНЫХ ДЛЯ ЧЕЛОВЕКА;
3. ПРОМЫШЛЕННЫЕ, ПРЕДНАЗНАЧЕННЫЕ ДЛЯ АВТОМАТИЗАЦИИ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ В
РАЗЛИЧНЫХ ОТРАСЛЯХ ПРОИЗВОДСТВА.
5.
Основные требование к изделиюПроанализировав область применения и технические особенности уже созданных
робототехнических систем при создании модели своего робота я выделил к нему ряд
требований:
1. Эксплуатация робота в трудно-проходимых стесненных условиях, небольшие
габариты;
2. Возможность поворотов и преодоления препятствий;
3. Беспроводная система управления;
4. Возможность видеофиксации;
5. Возможность двухсторонней передачи информации;
6. Возможность модернизации;
6. В состав робототехнического комплекса входят: · Программируемый модуль Lego MINDSTORMS (Рис.1); · 3 сервомотора: два для
В СОСТАВ РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА ВХОДЯТ:· ПРОГРАММИРУЕМЫЙ МОДУЛЬ LEGO MINDSTORMS (РИС.1);
· 3 СЕРВОМОТОРА: ДВА ДЛЯ УПРАВЛЕНИЯ ШАССИ, ОДИН – ДЛЯ ПОВОРОТНОГО МЕХАНИЗМА
ВЕДУЩИХ КОЛЕС;
· BLUETOOTH МОДУЛЬ ДЛЯ УДАЛЕННОГО УПРАВЛЕНИЯ РОБОТОМ;
· МОБИЛЬНЫЙ ТЕЛЕФОН С GSM МОДУЛЕМ И ПОДДЕРЖКОЙ ФОРМАТА СВЯЗИ 4G LTE ДЛЯ
СОЗДАНИЯ КАНАЛА СВЯЗИ;
· СПЕЦИАЛИЗИРОВАННАЯ КАМЕРА КРУГОВОГО ОБЗОРА: КАМЕРА 360 ГРАДУСОВ;
· ДАТЧИК КАЧАНИЯ ДЛЯ БЫСТРОГО ЗАПУСКА В АВТОНОМНОМ РЕЖИМЕ;
7. Робот использует колесное шасси с изменяемой геометрией. Мощная ходовая часть осуществляется за счет двух сервомоторов, в
РОБОТ ИСПОЛЬЗУЕТ КОЛЕСНОЕ ШАССИ С ИЗМЕНЯЕМОЙ ГЕОМЕТРИЕЙ. МОЩНАЯХОДОВАЯ ЧАСТЬ ОСУЩЕСТВЛЯЕТСЯ ЗА СЧЕТ ДВУХ СЕРВОМОТОРОВ, В ПЕРЕДНЕЙ
ЧАСТИ
РОБОТА.
ПЕРЕДАЧА
КРУТЯЩЕГО
МОМЕНТА
ПРОИЗВОДИТСЯ
НЕПОСРЕДСТВЕННО НА КОЛЕСА. ДВА СЕРВОМОТОРА, ПОДКЛЮЧЕННЫЕ К
ПОРТАМ А И С ПОЗВОЛЯЮТ ЕМУ ДВИГАТЬСЯ В НАПРАВЛЕНИИ ВПЕРЕД - НАЗАД.
КРОМЕ ТОГО, КАЖДЫЙ МОТОР МОЖЕТ РАБОТАТЬ ИЗОЛИРОВАНО ДЛЯ
МАНЕВРИРОВАНИЯ. ДИФФЕРЕНЦИАЛ ОТСУТСТВУЕТ. ТРЕТИЙ СЕРВОМОТОР В
СЛУЖИТ ДЛЯ ПОВОРОТА БЛОКА МОТОР-КОЛЕСО: ВЛЕВО-ВПРАВО ДЛЯ
ОБЕСПЕЧЕНИЯ МАКСИМАЛЬНОЙ МАНЁВРЕННОСТИ С СТЕСНЕННЫХ УСЛОВИЯХ.
8.
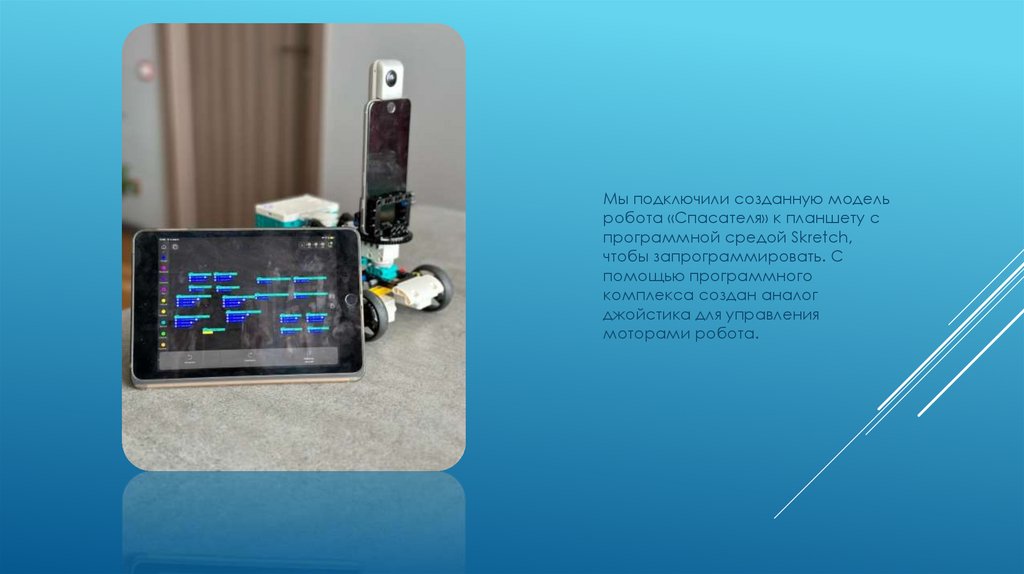
Мы подключили созданную модельробота «Спасателя» к планшету с
программной средой Skretch,
чтобы запрограммировать. С
помощью программного
комплекса создан аналог
джойстика для управления
моторами робота.
9.
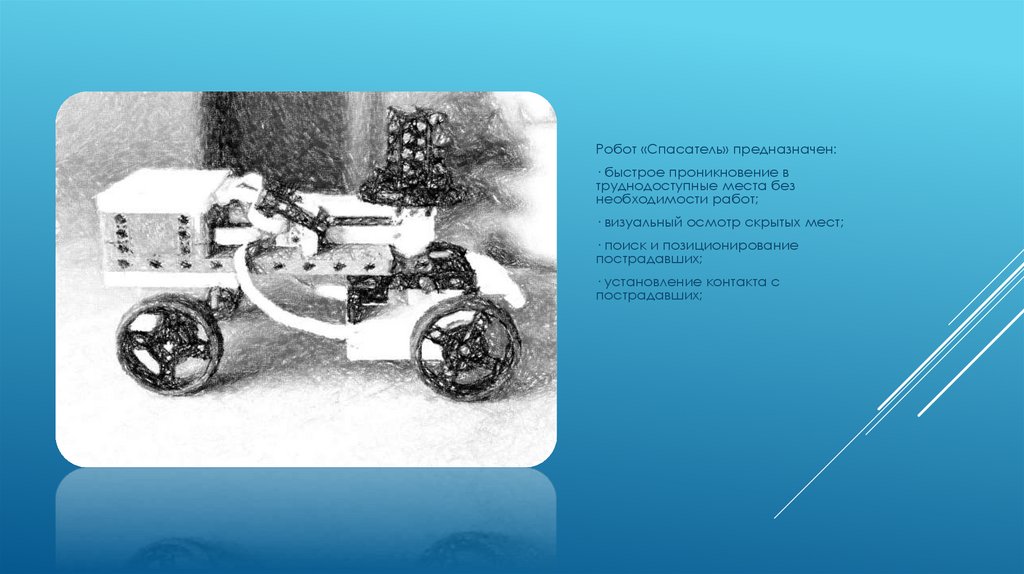
Робот «Спасатель» предназначен:· быстрое проникновение в
труднодоступные места без
необходимости работ;
· визуальный осмотр скрытых мест;
· поиск и позиционирование
пострадавших;
· установление контакта с
пострадавших;