


























 physics
physicsSimilar presentations:
")




")




Кинематика
1.
1. Савельев И.В. Кн. 1: Механика: Курс общей физики в 5-титомах
2. Иродов И. Е. Механика. Основные законы. Учеб. Пособие.
3. Хайкин С. Э. Физические основы механики: Учеб. Пособие
4. Е.М. Гершензон, Н.Н. Малов, А.Н. Мансуров. Курс общей
физики. Механика.
5. Сивухин Д.В. Общий курс физики в 5 т.т. Т.1 Механика.
1. Иродов И.Е. Задачи по общей физике.
2. Сахаров Д.И. Сборник задач по физике для вузов
2. Основные понятия механики
• Основная задача механики – зная состояние системы вначальный момент времени и законы, управляющие
движением, определить состояние системы во все
последующие моменты времени. Эта задача не может быть
решена точно
• Кинематика – это раздел физики, посвящённый изучению
движения тел. При этом причины движения не
рассматриваются
2
3. Кинематика
• Кинематика - наука, изучающая состояние движения независимо от вызывающихего сил, и получившая название от греческого слова
kinematos (-состояние движения) и составляющая часть общей науки о движении механики. Цель ее состоит в изучении геометрических свойств движения,
скоростей и ускорений: для достижения этой цели пользуются анализом и
геометрией.
• Кинематику называют геометрией четырех измерений, так как она имеет дело с
тремя координатами пространства и еще с четвертым переменным,
представляющим собой время.
• Скорости представляются первыми производными от координаты по времени,
• ускорение - вторыми производными и еще, кроме того, рассматриваются
производные от координат по времени высших порядков, называемые
ускорениями высших порядков. С аналитической точки зрения, вся кинематика
сводится к изучению соотношений, существующих между этими величинами.
4. Некоторые сведения о векторах
• Вектором будем называть величину, характеризующуюся численнымзначением (модулем) и направлением в пространстве, для которой задан закон
сложения (правило параллелограмма)
Векторы и скаляры.
Величины, которые полностью определяются только числовыми
значениями, называются скалярами.
Величины, для полной характеристики которых нужно знать не только
их величину, но и направление – векторы.
В физике широко применяется векторная форма описания движения.
Положение точки задается радиус – вектором это вектор, проведенный из
начала координат в данную точку .
Для любого действия над произвольными векторами нужно
предварительно перенести один из векторов параллельно самому себе так,
чтобы векторы выходили из одной точки. Если векторов несколько,
действия производят попарно, или берут проекции на две взаимно
перпендикулярные оси (х и y).
4
5.
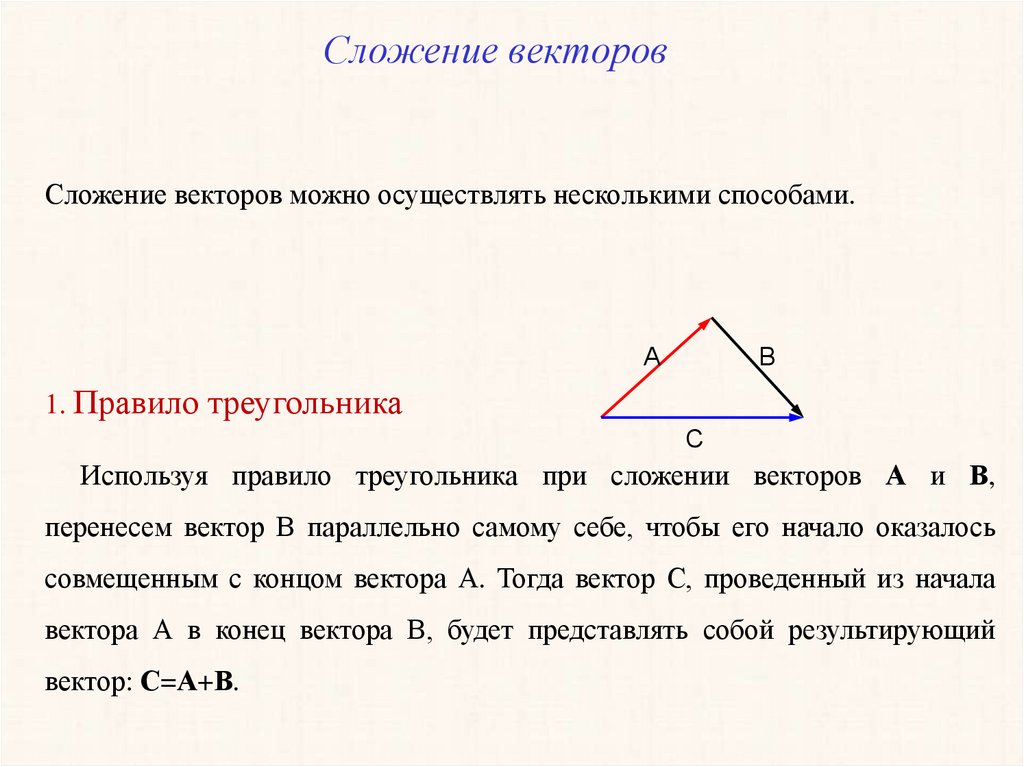
Сложение векторовСложение векторов можно осуществлять несколькими способами.
А
В
1. Правило треугольника
С
Используя правило треугольника при сложении векторов А и В,
перенесем вектор В параллельно самому себе, чтобы его начало оказалось
совмещенным с концом вектора А. Тогда вектор С, проведенный из начала
вектора А в конец вектора В, будет представлять собой результирующий
вектор: С=А+В.
6.
2. Правило параллелограммаПо правилу параллелограмма: перенесем вектор В (или А) так, чтобы начала
обоих векторов оказались совмещенными и строим на векторах А и В
параллелограмм, диагональ которого, будет результирующим вектором:
С=А+В.
C
А
B
С
А
D
В
E
3. Сложение нескольких векторов
В случае сложения более чем двух векторов перенесем векторы
параллельно самим себе, чтобы начало последующего вектора оказалось
совмещенным с концом предыдущего. Результирующий вектор будет
представлять собой вектор Е, проведенный из начала первого из слагаемых
векторов А в конец последнего D.
7.
При вычитание векторов конец вычитаемого векторасоединяется с концом уменьшаемого вектора.
Скалярное произведение векторов это скаляр.
a
α
(a b ) | a | | b | cos
b
Векторным произведением двух векторов называется вектор .
[a b ] | a | | b | sin
a
[b a ]
b
[a b ]
b
a
8. Основные понятия механики
• Поступательное движение – такое, при котором любаяпрямая, связанная с телом перемещается параллельно самой
себе
• Вращательное движение – такое, при котором все точки
тела движутся по окружностям, центры которых лежат на
одной прямой, называемой осью вращения
8
9. Кинематика поступательного движения
• При поступательном движении тела все точки тела движутсяодинаково, и, вместо того чтобы рассматривать движение каждой точки
тела, можно рассматривать движение только одной его точки.
Основные понятия кинематики
Кинематикой называют раздел механики, в котором движение тел
рассматривается без выяснения причин этого движения
Механическим движением тела называют изменение его положения в
пространстве относительно других тел с течением времени
Система координат состоит из осей, для определения пространственных
координат тела и часов
Траектория – это линия, которую описывает некоторая материальная
точка в процессе движения
Путь – это расстояние между двумя точками, измеренное вдоль
траектории движения
10.
• Система координат состоит из осей, для определенияпространственных координат тела и часов
• Траектория – это линия, которую описывает некоторая
материальная точка в процессе движения
• Путь – это расстояние между двумя точками, измеренное вдоль
траектории движения
Материальная точка - модель тела, размерами которого в
рассматриваемых условиях можно пренебречь.
Рассмотрение любого движения начинают с выбора системы
отсчета, включающей в себя:
тело отсчета,
систему координат и
приборы для исследования движения.
10
11. Тело отсчёта
• Движение одного и того же тела относительно разных телоказывается различным. Для описания движения тела нужно
указать, по отношению к какому телу рассматривается
движение. Это тело называют телом отсчета Система
координат, связанная с телом отсчета, и часы для отсчета
времени образуют систему отсчета, позволяющую
определять положение движущегося тела в любой момент
времени. В Международной системе единиц (СИ) за единицу
длины принят метр, а за единицу времени – секунда.
12. СИСТЕМА ОТСЧЕТА
Система отсчетанеобходима для фиксации
положения объектов
в пространстве и
определения
изменения положения
объектов
с течением времени,
то есть описания
механического движения.
13.
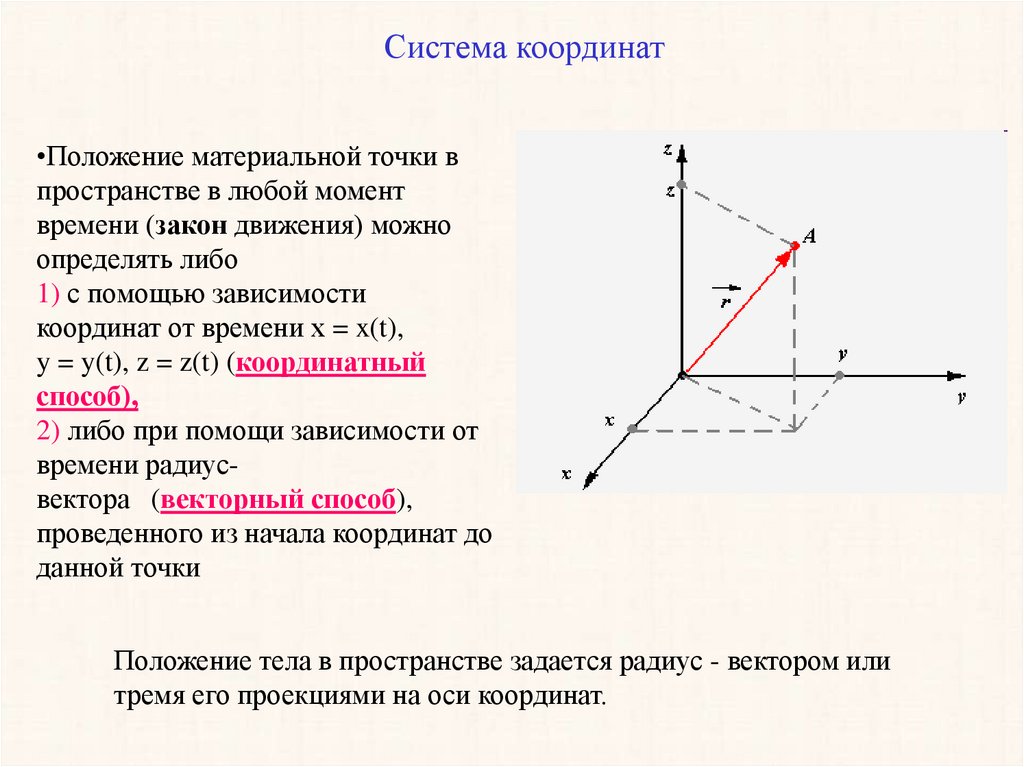
Система координат•Положение материальной точки в
пространстве в любой момент
времени (закон движения) можно
определять либо
1) с помощью зависимости
координат от времени x = x(t),
y = y(t), z = z(t) (координатный
способ),
2) либо при помощи зависимости от
времени радиусвектора (векторный способ),
проведенного из начала координат до
данной точки
Положение тела в пространстве задается радиус - вектором или
тремя его проекциями на оси координат.
14. РАДИУС-ВЕКТОР
x r cos ;y r cos ;
z r cos .
cos2 cos2 cos2 1.
15.
Следовательно закон движения - это зависимостьрадиус-вектора от времени или зависимость координат
во времени.
где - r
радиус-вектор,
x, y, z - координаты тела.
16.
Пусть за время t точка А переместилась из точки 1 в точку 2Вектор перемещения - приращение
r за время t
r r r x x i y y j z z k ;
Δ r Δxi Δyj Δzk ;
2
1
0
0
0
Δ r Δx Δy Δz .
2
2
2
17.
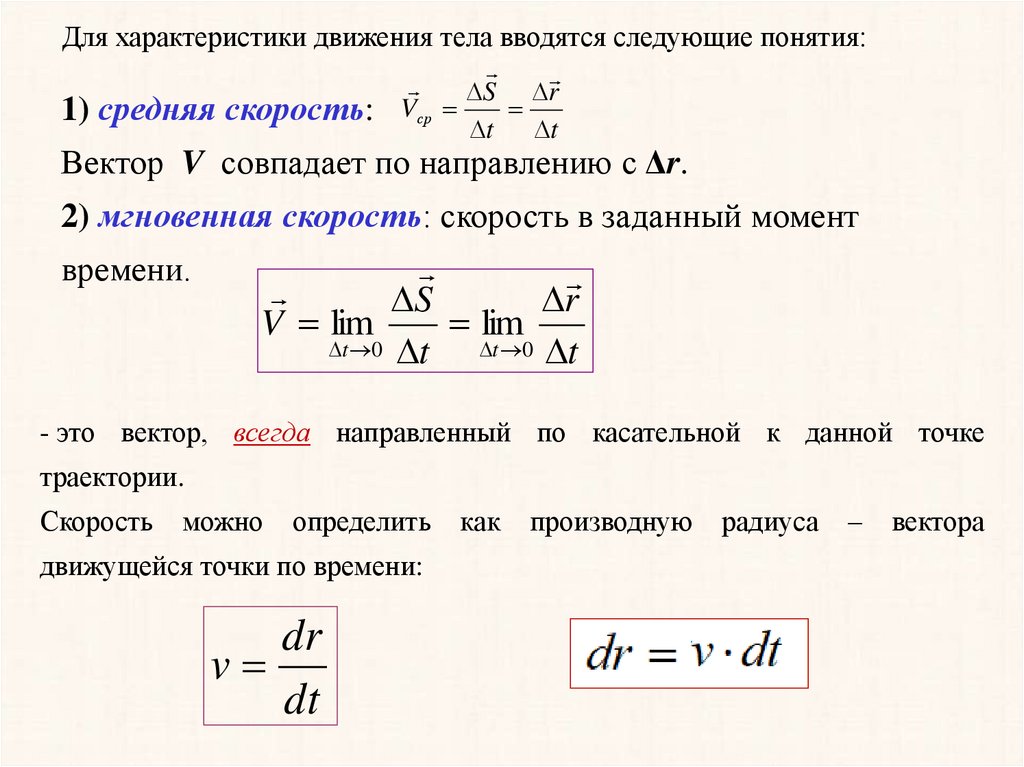
Для характеристики движения тела вводятся следующие понятия:1) средняя скорость:
S r
Vср
t t
Вектор V совпадает по направлению с Δr.
2) мгновенная скорость: скорость в заданный момент
времени.
S
r
V lim
lim
t 0 t
t 0 t
- это вектор, всегда направленный по касательной к данной точке
траектории.
Скорость
можно
определить
движущейся точки по времени:
dr
v
dt
как
производную
радиуса
–
вектора
18.
Модуль мгновенной скорости определяется равенством:где Vx , Vy , Vz - проекции вектора скорости на
координатные оси x, y, z
Направление вектора скорости задается косинусами:
где α , β , γ - углы между вектором скорости и осями x, y, z
соответственно.
19.
Равномерное прямолинейное движение.Равномерное движение - движение при котором материальная
точка за любые равные промежутки времени совершает равные
перемещения.
При равномерном прямолинейном движении скорость тела
постоянна, ускорение равно нулю. Траектория равномерного
прямолинейного движения - прямая линия.
Для физических величин характеризующих движение имеем:
a=0
V=Const
Sx = Vx· t
x=x0+ Vx·t
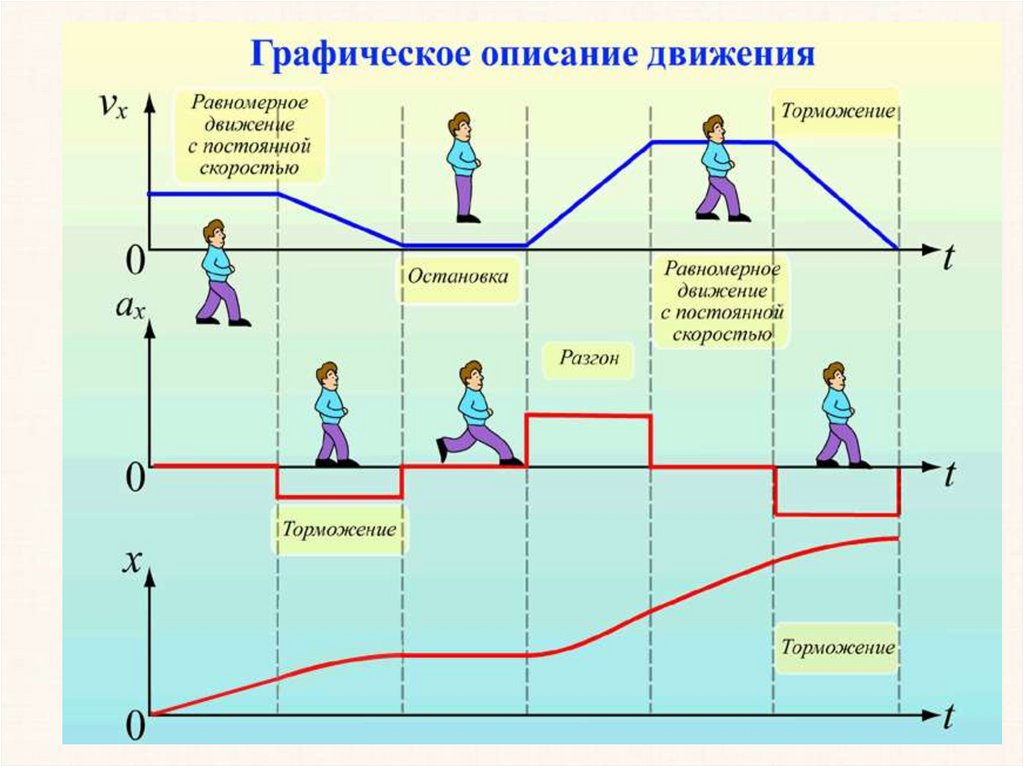
20. Графики движения тел, перемещающихся с различной скоростью
x 3 350 м сx, м
600
x 2 100 м с
500
400
x1 50 м с
300
200
100
0
1
2
3
t, с
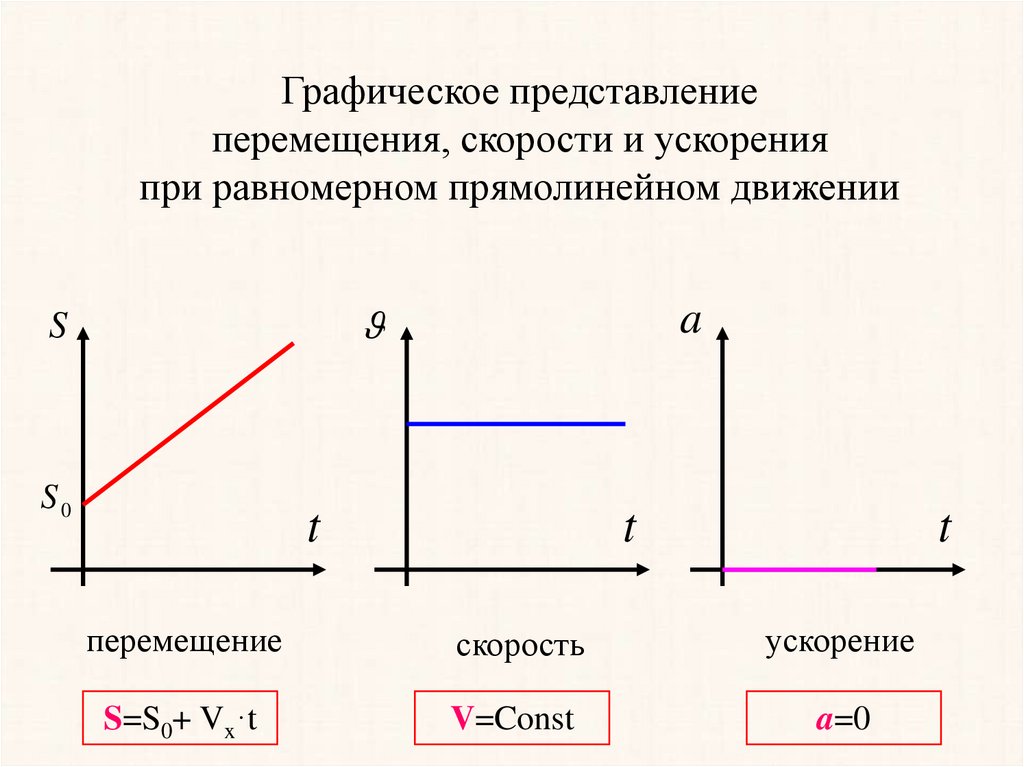
21.
Графическое представлениеперемещения, скорости и ускорения
при равномерном прямолинейном движении
S
S0
a
t
t
t
перемещение
скорость
ускорение
S=S0+ Vx·t
V=Const
a=0
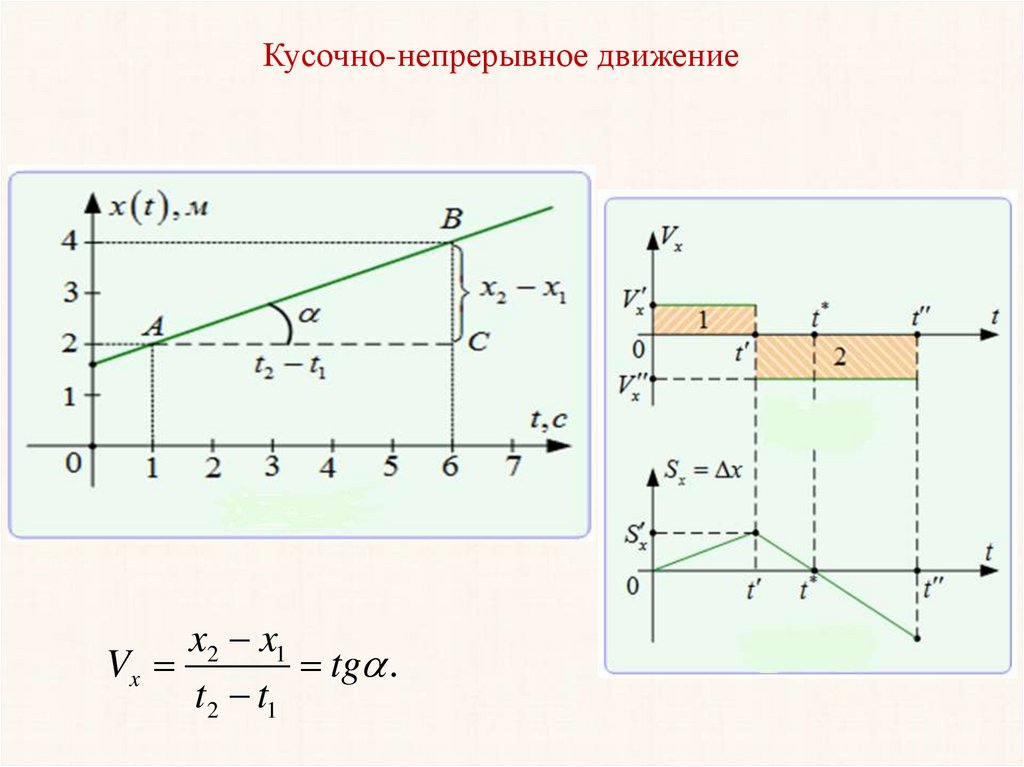
22.
Кусочно-непрерывное движениеx2 x1
Vx
tg .
t2 t1
23.
• Равнопеременным называется движение, прикотором скорость тела (материальной точки) за
любые равные промежутки времени изменяется
одинаково, т.е. на равные величины. Это движение
может быть
• равноускоренным и
• равнозамедленным.
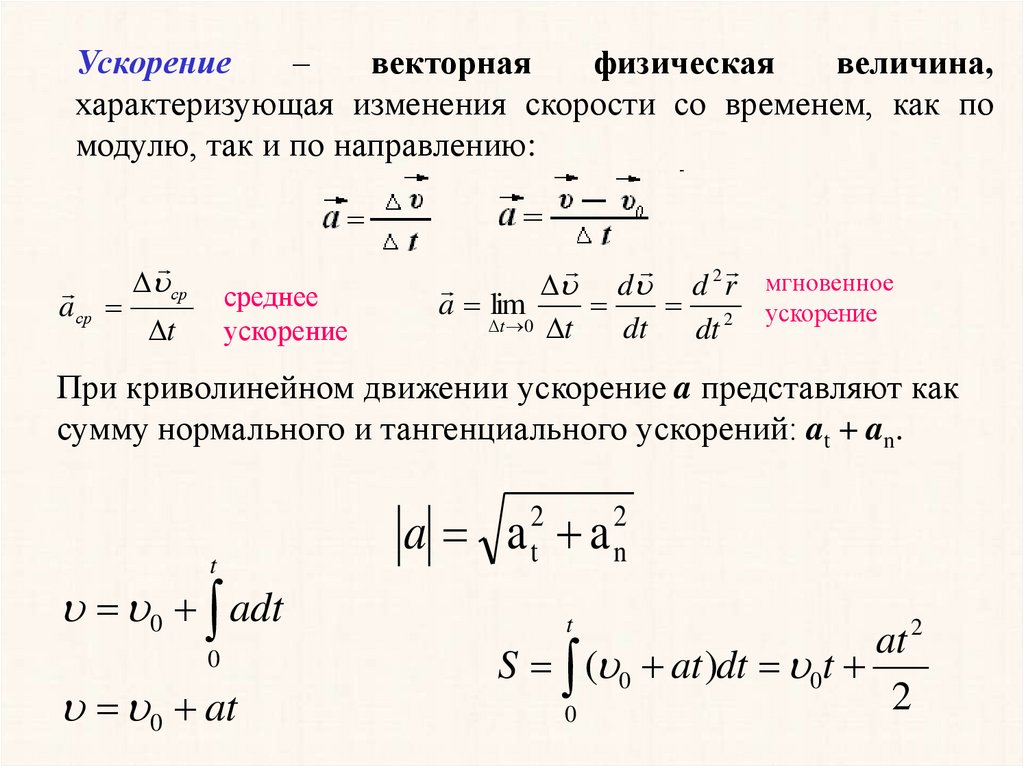
24.
Ускорение–
векторная
физическая
величина,
характеризующая изменения скорости со временем, как по
модулю, так и по направлению:
a ср
ср
среднее
ускорение
t
d d 2 r мгновенное
a lim
2 ускорение
t 0 t
dt
dt
При криволинейном движении ускорение a представляют как
сумму нормального и тангенциального ускорений: at + an.
t
0 adt
0
0 at
a a a
2
t
t
2
n
at 2
S ( 0 at )dt 0t
2
0
25. УСКОРЕНИЕ КАК ПРОИЗВОДНАЯ
dVd 2r
a a
V 2 r
dt
dt
a ax2 a y2 az2 Vx2 Vy2 Vz2 ;
a rx2 ry2 rz2 x 2 y 2 z 2 .
ax Vx rx x;
ay Vy ry y;
az Vz rz z.
26.
В системе СИ-Международной системе единиц ускорениеизмеряется в м/с2
График зависимости проекции скорости от времени.
27.
График зависимости проекции перемещения от времениaxt 2
S x v0 x t
2
axt 2
S x v0 xt
2
28.
КоординатаПроекция перемещения Sx =х-х0 , тогда
в любой момент времени для тела, движущегося равноускоренно
2
at
x x0 v0t
2
График зависимости координаты от времени.
x v0 x t
axt
2
axt 2
x v0 x t
2
2
axt 2
x x0 v0 x t
2
axt 2
x x0 v0 x t
2
29.
Перемещение2
at
S v0t
2
(1)
Второй вариант формулы нахождения перемещения:
v v0 Подставим это выражение в
v v0 at t
формулу (1).
a
v 0 (v v 0 ) a v v 0 2
S
( )
откуда
a
2
a
v 2 v 0 2
S
2a
30.
31.
32.
Времядвижения
т.е.
тела
вниз
(падение)
равно
подъема,
. Отсюда, общее время полета:
Для определения дальности полета подставим выражение
выражение
времени
и получим:
времени полета в
33.
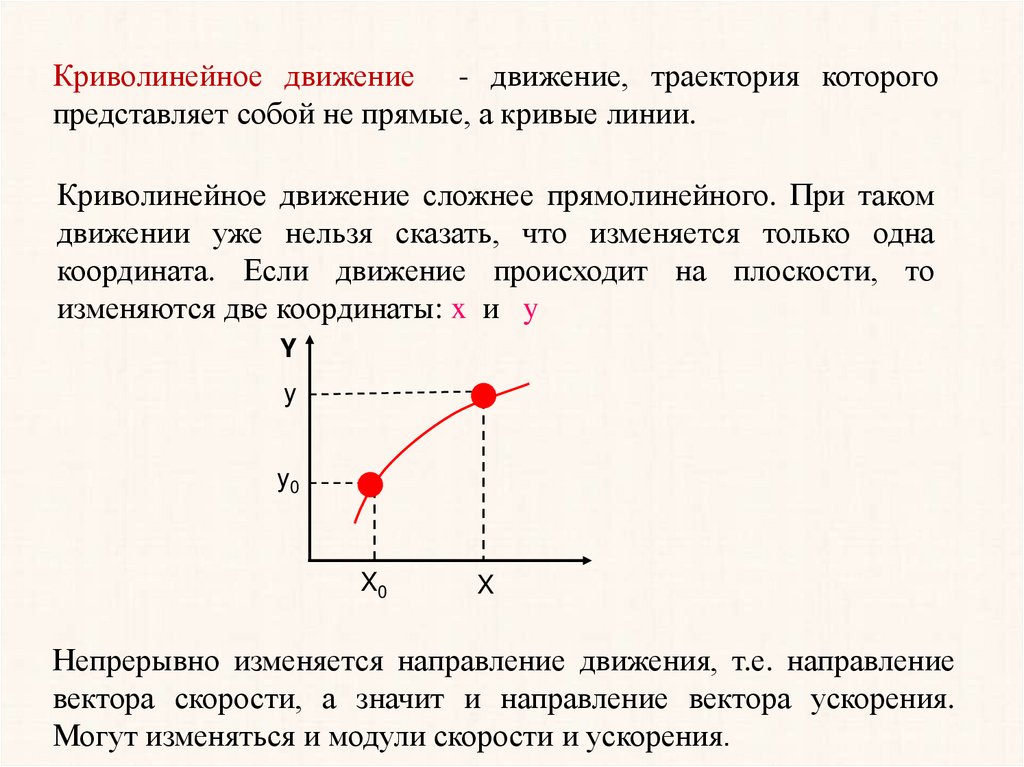
Криволинейное движение - движение, траектория которогопредставляет собой не прямые, а кривые линии.
Криволинейное движение сложнее прямолинейного. При таком
движении уже нельзя сказать, что изменяется только одна
координата. Если движение происходит на плоскости, то
изменяются две координаты: x и y
Y
y
y0
X0
X
Непрерывно изменяется направление движения, т.е. направление
вектора скорости, а значит и направление вектора ускорения.
Могут изменяться и модули скорости и ускорения.
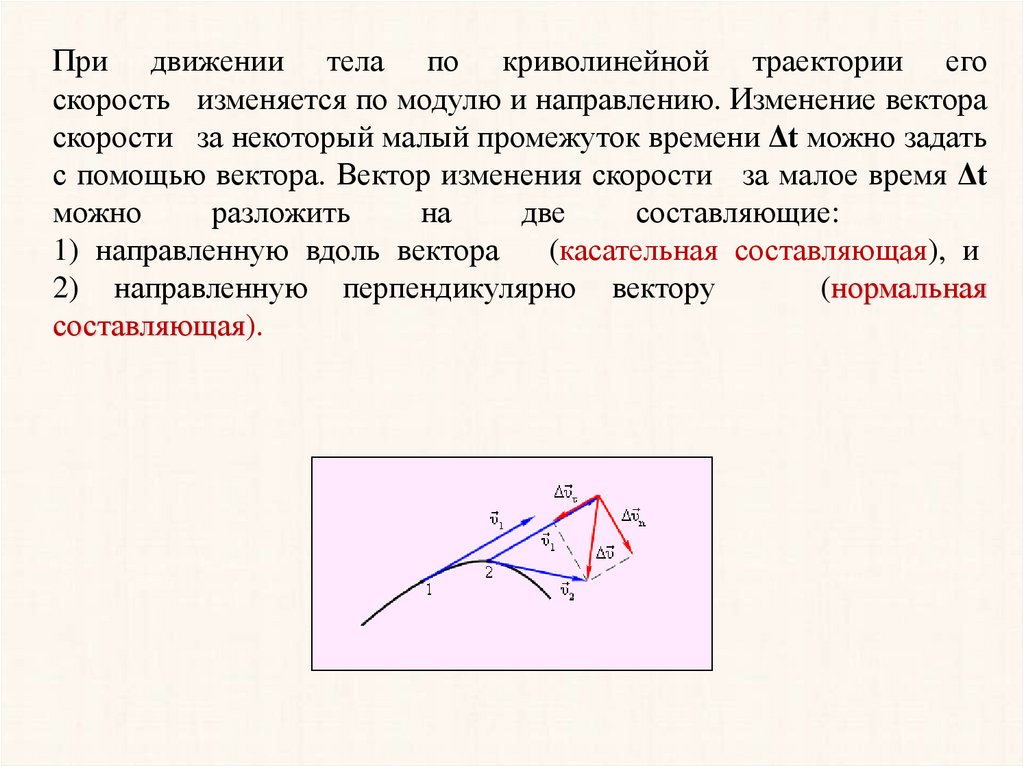
34.
При движении тела по криволинейной траектории егоскорость изменяется по модулю и направлению. Изменение вектора
скорости за некоторый малый промежуток времени Δt можно задать
с помощью вектора. Вектор изменения скорости за малое время Δt
можно
разложить
на
две
составляющие:
1) направленную вдоль вектора
(касательная составляющая), и
2) направленную перпендикулярно вектору
(нормальная
составляющая).
35. Движение по дугам окружностей
• Криволинейное движение можно представить какдвижение по дугам окружностей
36.
37.
Рассмотрим движение по окружности радиусом Rс постоянной скоростью υ. За время Δt точка
сместиться из положения 1 в положение 2,
совершив поворот на угол Δϕ и пройдя путь ΔS.
Перенесем вектор скорости из точки 2 в точку 1 и
найдем разность этих векторов. Получим
равнобедренный треугольник 134. Вектор Δυ
имеет направление n.
υ
3
τ
n
Рассмотрим случай криволинейного движения.
Ускорением называется изменение скорости, но
скорость – векторная величина, а то есть, может
изменятся как по величине, так и по направлению.
1
2
4
R
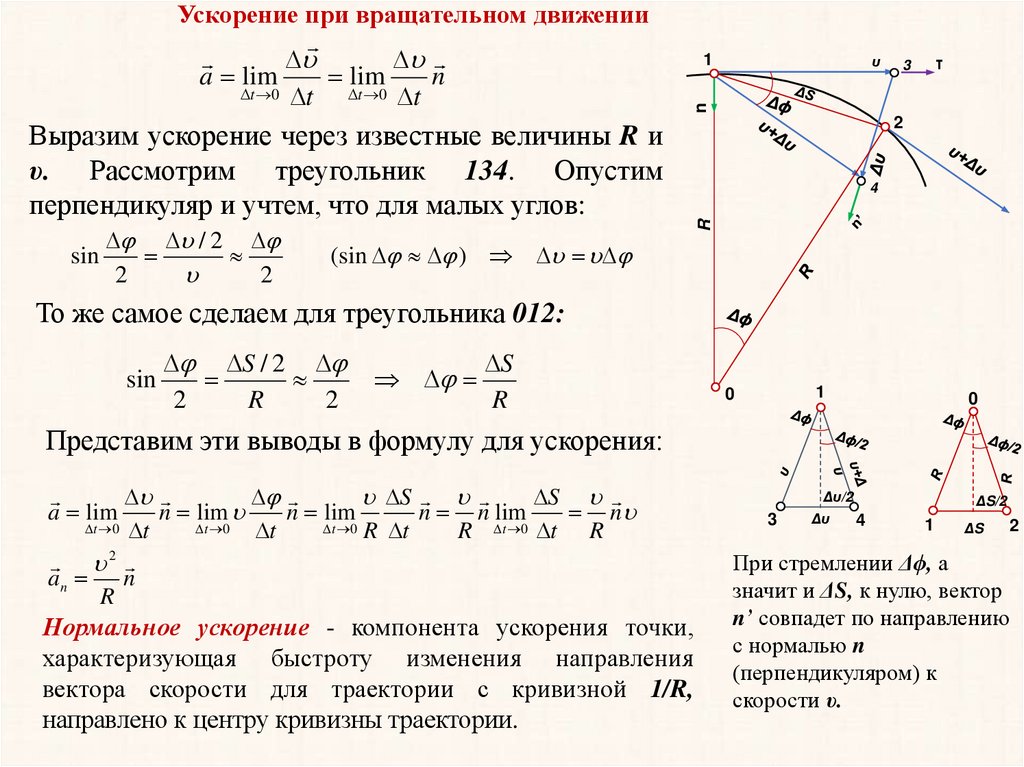
Ускорение при вращательном движении
0
Ускорение можно представить в виде:
a lim
lim
n
t 0 t
t 0 t
37
38.
1/ 2
2
2
τ
3
n
Выразим ускорение через известные величины R и
υ. Рассмотрим треугольник 134. Опустим
перпендикуляр и учтем, что для малых углов:
sin
υ
2
4
R
Ускорение при вращательном движении
a lim
lim
n
t 0 t
t 0 t
(sin )
То же самое сделаем для треугольника 012:
sin
S / 2
2
R
2
S
R
0
1
0
Δυ/2
ΔS/2
Представим эти выводы в формулу для ускорения:
S
S
a lim
n lim
n lim
n n lim
n
t 0 t
t 0
t 0 R t
t
R t 0 t R
2
an
n
R
Нормальное ускорение - компонента ускорения точки,
характеризующая быстроту изменения направления
вектора скорости для траектории с кривизной 1/R,
направлено к центру кривизны траектории.
3
Δυ
4
1
ΔS
2
При стремлении Δϕ, а
значит и ΔS, к нулю, вектор
n’ совпадет по направлению
с нормалью n
(перпендикуляром) к
скорости υ.