


 mathematics
mathematicsSimilar presentations:




")

")



Типовые математические модели (лекция 6)
1.
Типовые математические модели2.
. Математические схемымоделирования
1. Основные подходы к построению
математических моделей систем
2. Непрерывно-детерминированные модели
(D-схемы)
3. Дискретно-детерминированные модели
(F-схемы)
4. Дискретно-стохастические модели
(P-схемы)
5. Непрерывно-стохастические модели
(Q-схемы)
6. Сетевые модели (N-схемы)
7. Комбинированные модели (A-схемы)
3.
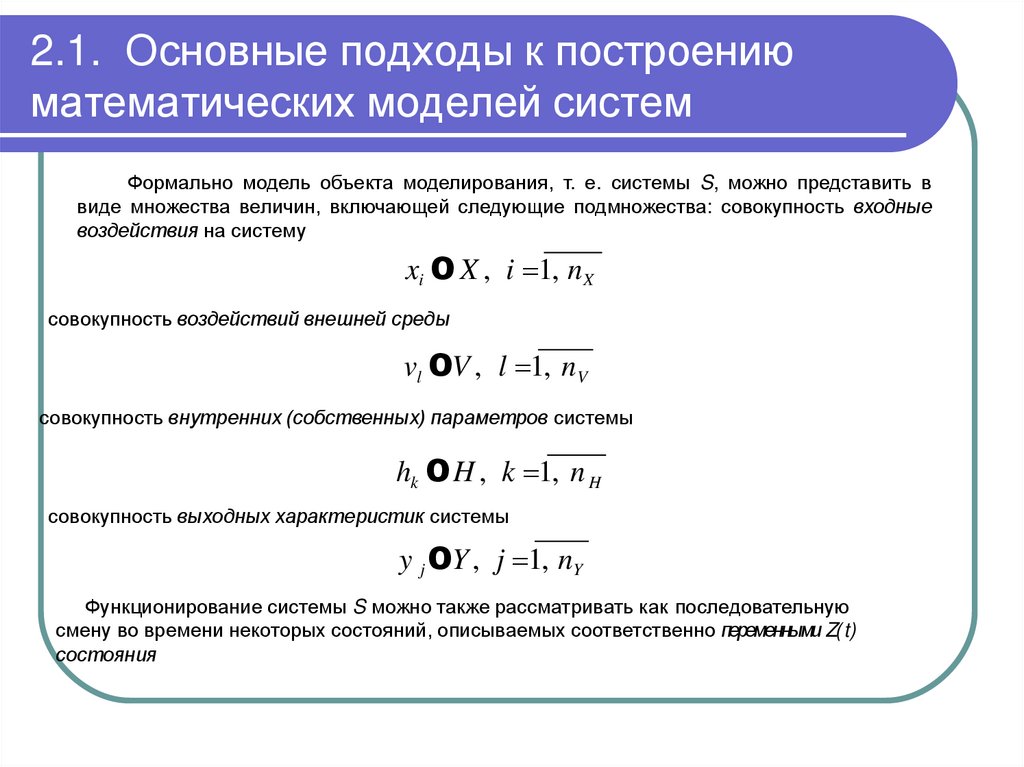
2.1. Основные подходы к построениюматематических моделей систем
Формально модель объекта моделирования, т. е. системы S, можно представить в
виде множества величин, включающей следующие подмножества: совокупность входные
воздействия на систему
xi О X , i 1, nX
совокупность воздействий внешней среды
vl ОV , l 1, nV
совокупность внутренних (собственных) параметров системы
hk ОH , k 1, n H
совокупность выходных характеристик системы
y j ОY , j 1, nY
Функционирование системы S можно также рассматривать как последовательную
смену во времени некоторых состояний, описываемых соответственно переменными Z( t)
состояния
4.
Непрерывно-детерминированныемодели D-схемы
Непрерывно-детерминированные модели или Dсхемы (Dinamic) отражают динамику изучаемой
системы, то есть ее поведение во времени, и
описываются дифференциальными уравнениями
5.
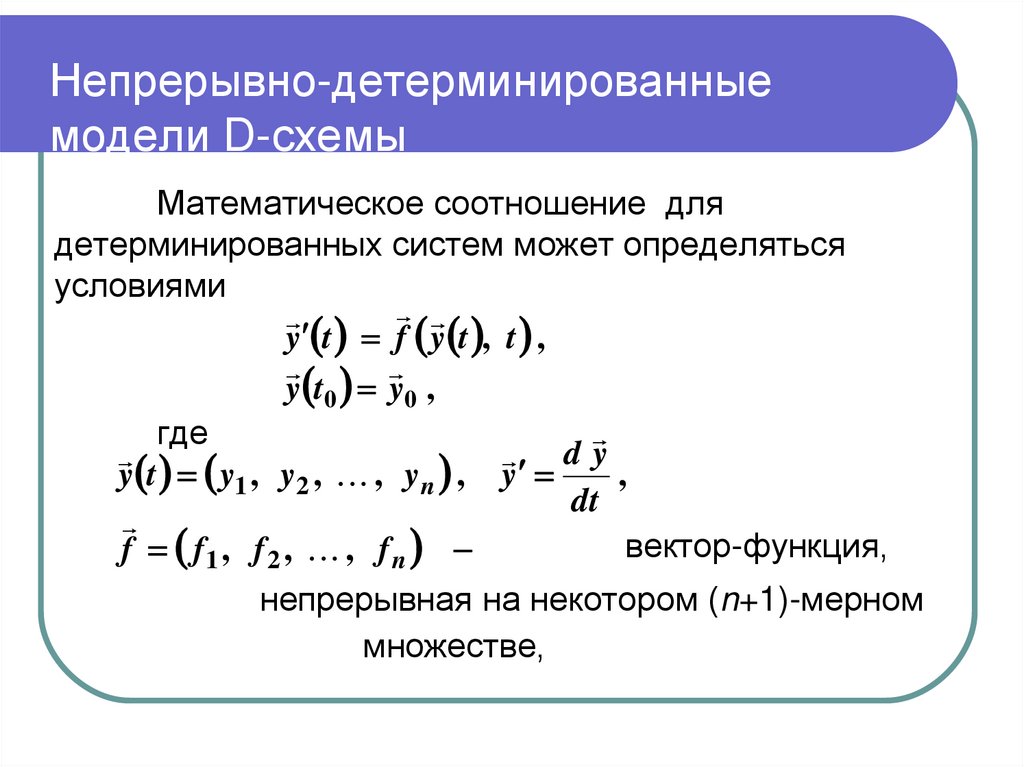
Непрерывно-детерминированныемодели D-схемы
Математическое соотношение для
детерминированных систем может определяться
условиями
y t f y t , t ,
y t0 y0 ,
где
dy
y t y1 , y2 , , yn , y
,
dt
вектор-функция,
f f1 , f 2 , , f n
непрерывная на некотором (n+1)-мерном
множестве,
6.
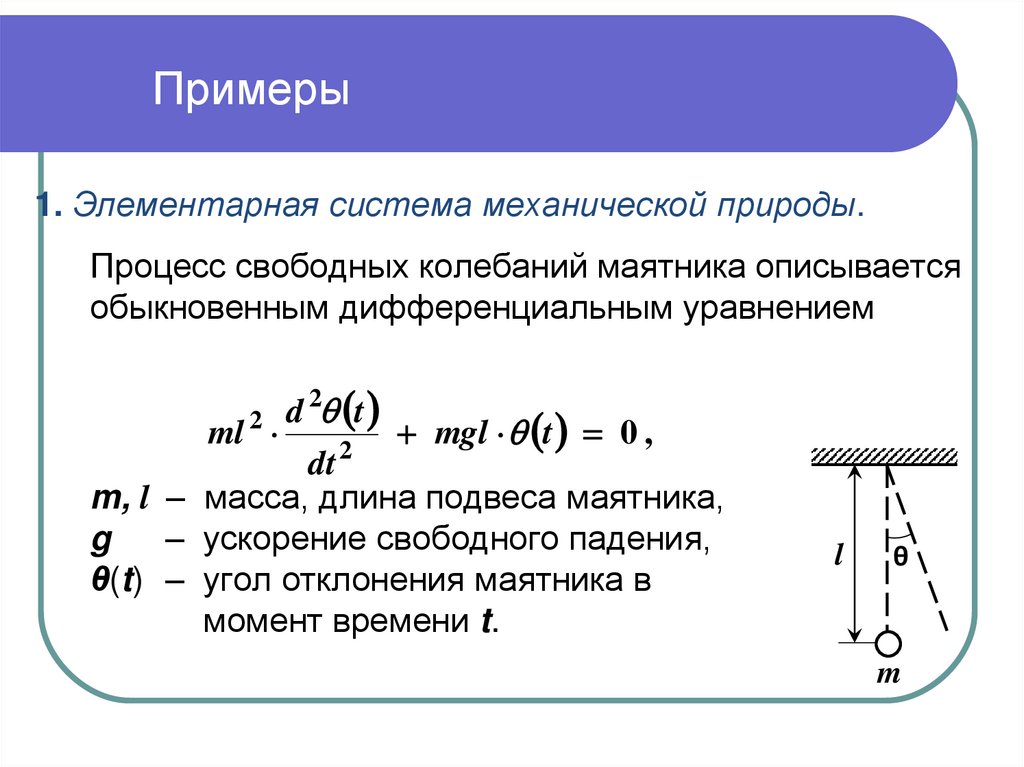
Примеры1. Элементарная система механической природы.
Процесс свободных колебаний маятника описывается
обыкновенным дифференциальным уравнением
ml 2
d 2 t
2
mgl t 0 ,
dt
m, l – масса, длина подвеса маятника,
g
– ускорение свободного падения,
θ(t) – угол отклонения маятника в
момент времени t.
l
θ
m
7.
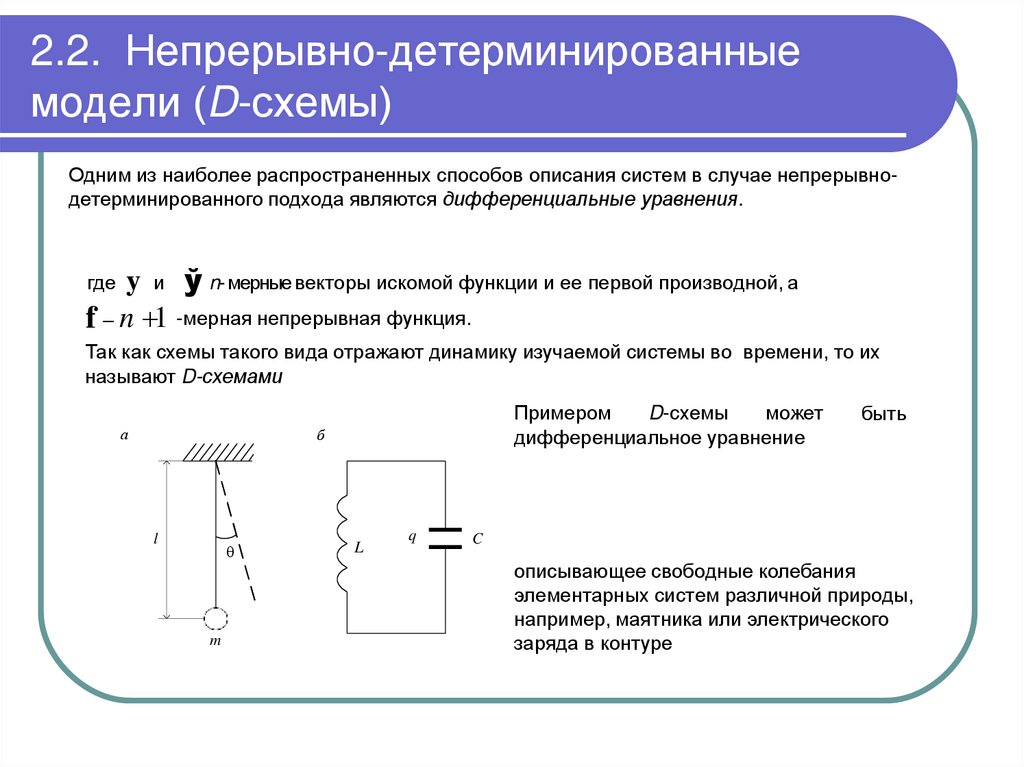
2.2. Непрерывно-детерминированныемодели (D-схемы)
Одним из наиболее распространенных способов описания систем в случае непрерывнодетерминированного подхода являются дифференциальные уравнения.
где y и
ў n- мерные векторы искомой функции и ее первой производной, а
f – n 1 -мерная непрерывная функция.
Так как схемы такого вида отражают динамику изучаемой системы во времени, то их
называют D-схемами
а
Примером
D-схемы
может
дифференциальное уравнение
б
l
m
L
q
быть
C
описывающее свободные колебания
элементарных систем различной природы,
например, маятника или электрического
заряда в контуре
8.
2.3. Дискретно-детерминированныемодели (F-схемы)
Конечный автомат (F-автомат)
Математический объект, задаваемый конечным набором состояний Z,
конечными множествами входных X и выходных Y сигналов, а также двумя
функциями: , определяющей новое состояние автомата в зависимости от текущего
состояния и входного сигнала, и , определяющей по текущему состоянию и
входному сигналу выходной сигнал.
F-автомат первого рода,
называемый также
автоматом Мили.
z(t 1) z( t) ,x(t) ,
t= 0, 1, 2, K
y(t) z[(t), x(t) , t =
0, 1, 2, K
F-автомат второго рода
y(t) z(t), x(t+1) ,
t 1, 2, 3, K
F-автомате Мура
y(t) z(t) ,
t =0, 1, 2,K
9.
Графы автоматов Мили (а) и Мура (б)а
б
x2 / y1
y1
x2
z0
x2
z0
y3
z4
z1
x1
x1
z2
x1/ y 2
y1
x1
x2
x2 / y2
z1
x1
z3
z2
y2
x1
y3
x2
10.
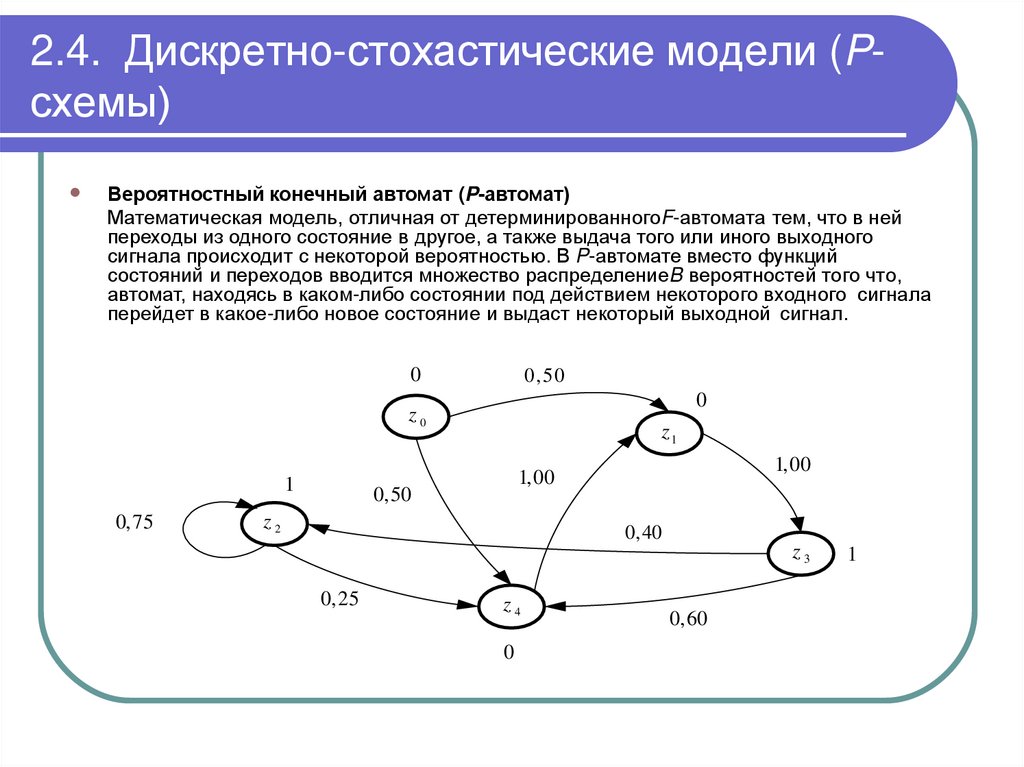
2.4. Дискретно-стохастические модели (Pсхемы)Вероятностный конечный автомат (P-автомат)
Математическая модель, отличная от детерминированногоF-автомата тем, что в ней
переходы из одного состояние в другое, а также выдача того или иного выходного
сигнала происходит с некоторой вероятностью. В P-автомате вместо функций
состояний и переходов вводится множество распределениеB вероятностей того что,
автомат, находясь в каком-либо состоянии под действием некоторого входного сигнала
перейдет в какое-либо новое состояние и выдаст некоторый выходной сигнал.
0
0,50
0
z0
1
0,75
z1
1,00
1,00
0,50
z2
0,40
0, 25
z4
0
z3
0,60
1
11.
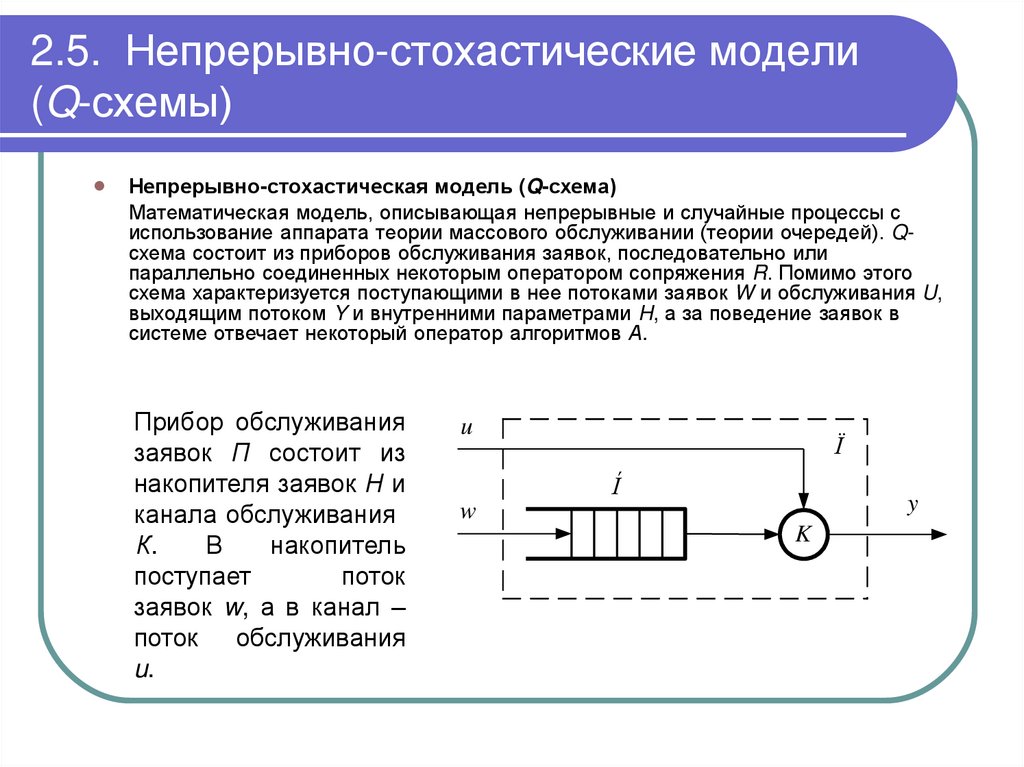
2.5. Непрерывно-стохастические модели(Q-схемы)
Непрерывно-стохастическая модель (Q-схема)
Математическая модель, описывающая непрерывные и случайные процессы с
использование аппарата теории массового обслуживании (теории очередей). Qсхема состоит из приборов обслуживания заявок, последовательно или
параллельно соединенных некоторым оператором сопряжения R. Помимо этого
схема характеризуется поступающими в нее потоками заявок W и обслуживания U,
выходящим потоком Y и внутренними параметрами H, а за поведение заявок в
системе отвечает некоторый оператор алгоритмов А.
Прибор обслуживания
заявок П состоит из
накопителя заявок Н и
канала обслуживания
К.
В
накопитель
поступает
поток
заявок w, а в канал –
поток обслуживания
u.
u
Ï
Í
y
w
K
12.
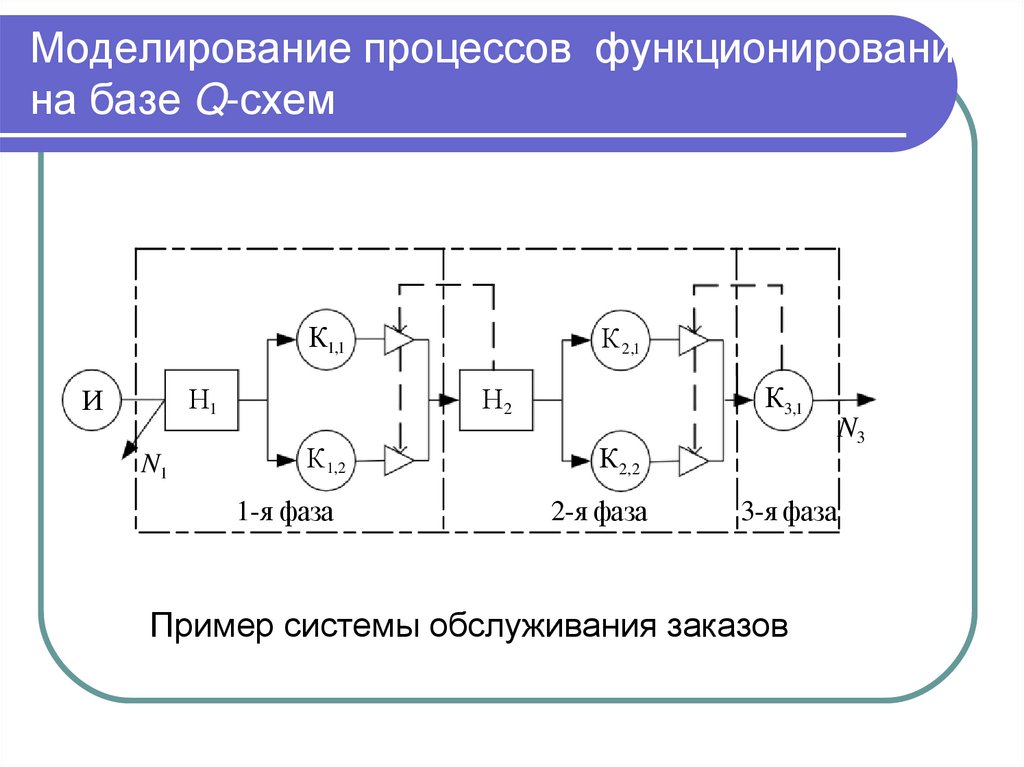
Моделирование процессов функционированияна базе Q-схем
К1,1
Н1
И
N1
К 2,1
К3,1
Н2
К1,2
К2,2
1-я фаза
2-я фаза
3-я фаза
Пример системы обслуживания заказов
N3
13.
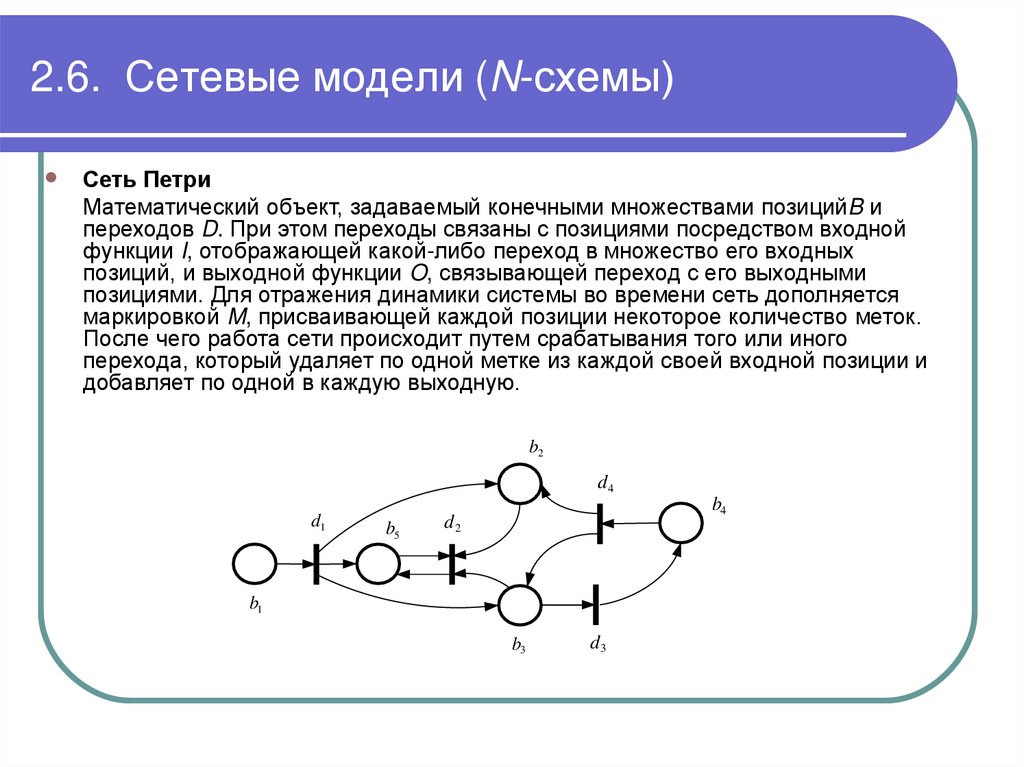
2.6. Сетевые модели (N-схемы)Сеть Петри
Математический объект, задаваемый конечными множествами позицийB и
переходов D. При этом переходы связаны с позициями посредством входной
функции I, отображающей какой-либо переход в множество его входных
позиций, и выходной функции O, связывающей переход с его выходными
позициями. Для отражения динамики системы во времени сеть дополняется
маркировкой M, присваивающей каждой позиции некоторое количество меток.
После чего работа сети происходит путем срабатывания того или иного
перехода, который удаляет по одной метке из каждой своей входной позиции и
добавляет по одной в каждую выходную.
b2
d4
d1
b5
b4
d2
b1
b3
d3
14.
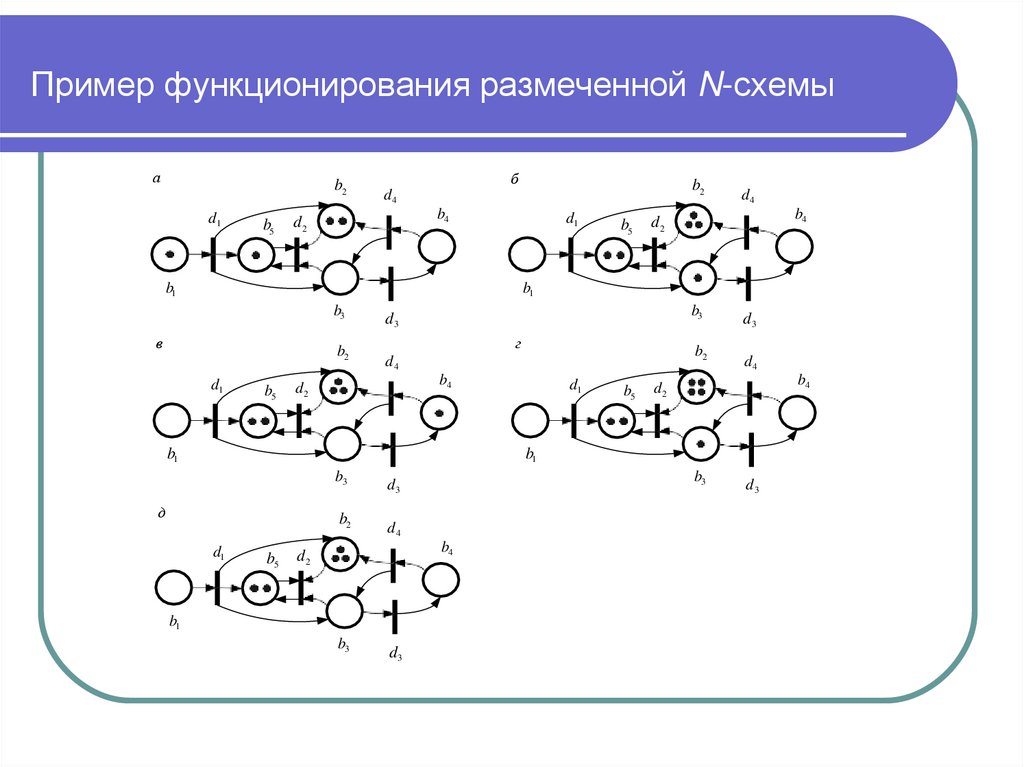
Пример функционирования размеченной N-схемыа
b2
d1
b5
б
b2
d4
b4
d2
d1
b1
b5
d4
b4
d2
b1
b3
в
b2
d1
b5
b3
d3
г
b2
d4
b4
d2
b1
d1
b5
d3
d4
b4
d2
b1
b3
д
b2
d1
b5
b3
d3
d4
b4
d2
b1
b3
d3
d3
15.
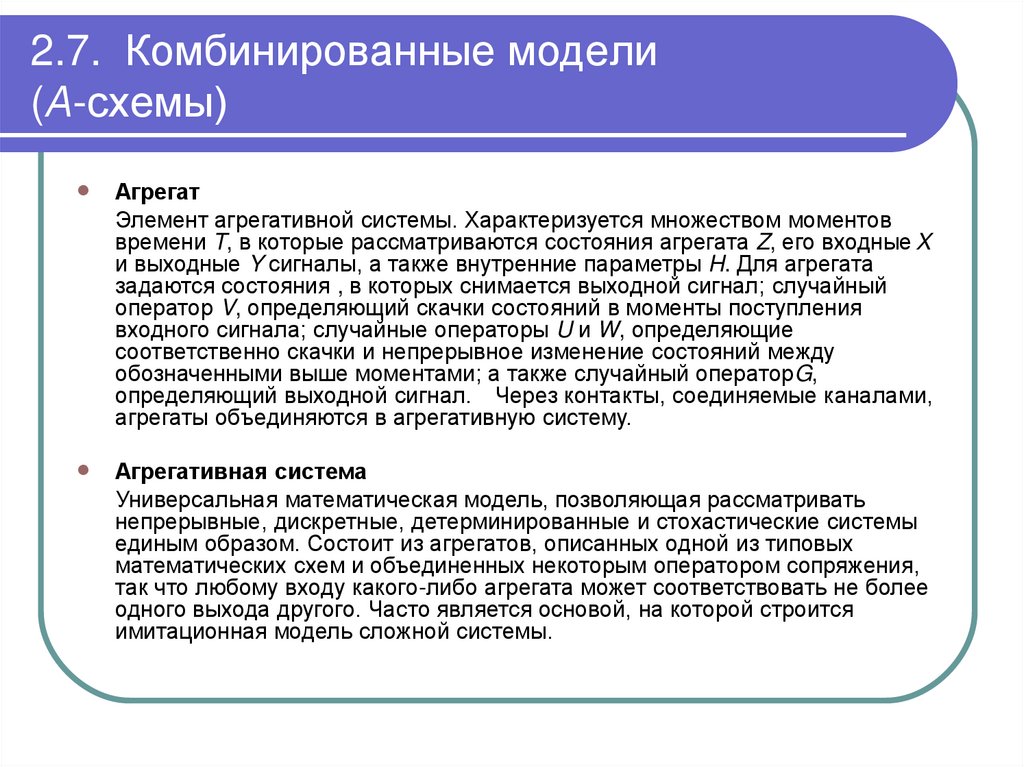
2.7. Комбинированные модели(А-схемы)
Агрегат
Элемент агрегативной системы. Характеризуется множеством моментов
времени T, в которые рассматриваются состояния агрегата Z, его входные X
и выходные Y сигналы, а также внутренние параметры H. Для агрегата
задаются состояния , в которых снимается выходной сигнал; случайный
оператор V, определяющий скачки состояний в моменты поступления
входного сигнала; случайные операторы U и W, определяющие
соответственно скачки и непрерывное изменение состояний между
обозначенными выше моментами; а также случайный операторG,
определяющий выходной сигнал. Через контакты, соединяемые каналами,
агрегаты объединяются в агрегативную систему.
Агрегативная система
Универсальная математическая модель, позволяющая рассматривать
непрерывные, дискретные, детерминированные и стохастические системы
единым образом. Состоит из агрегатов, описанных одной из типовых
математических схем и объединенных некоторым оператором сопряжения,
так что любому входу какого-либо агрегата может соответствовать не более
одного выхода другого. Часто является основой, на которой строится
имитационная модель сложной системы.
16.
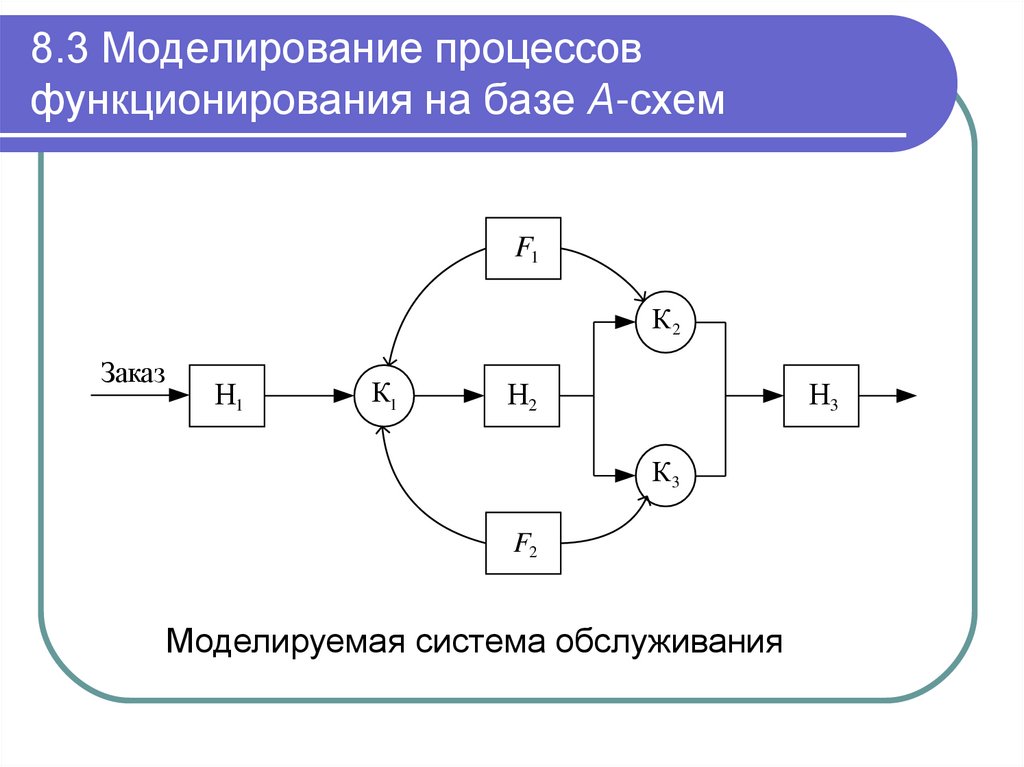
8.3 Моделирование процессовфункционирования на базе А-схем
F1
К2
Заказ
Н1
К1
Н2
Н3
К3
F2
Моделируемая система обслуживания
17.
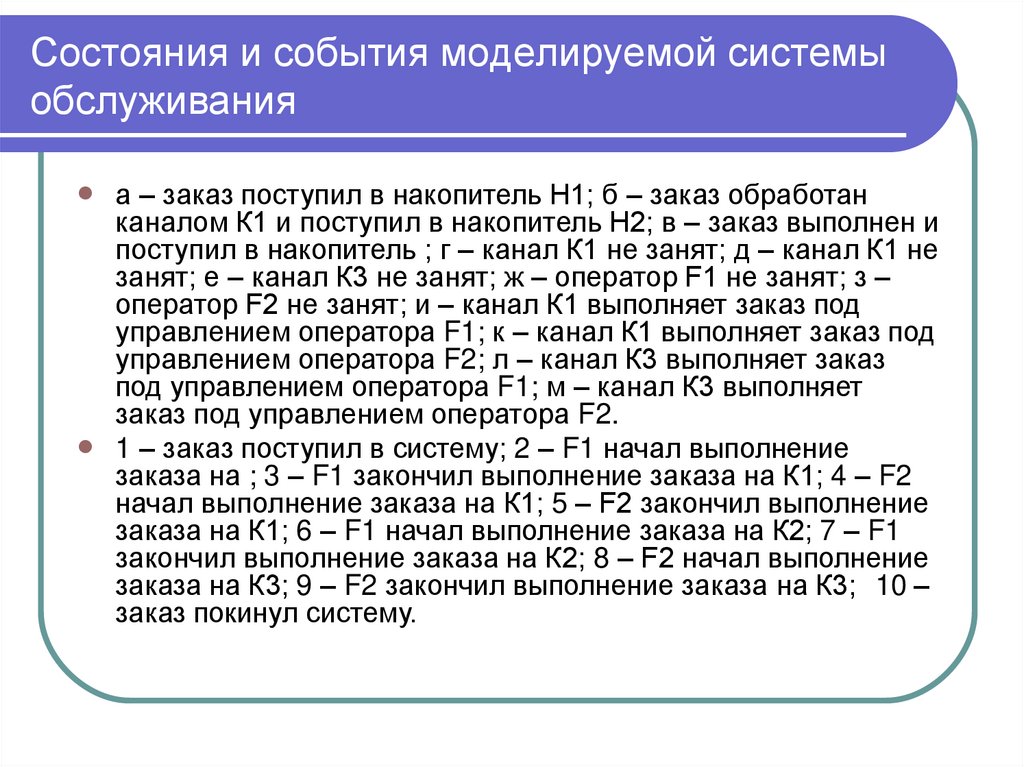
Состояния и события моделируемой системыобслуживания
а – заказ поступил в накопитель H1; б – заказ обработан
каналом К1 и поступил в накопитель H2; в – заказ выполнен и
поступил в накопитель ; г – канал К1 не занят; д – канал К1 не
занят; е – канал К3 не занят; ж – оператор F1 не занят; з –
оператор F2 не занят; и – канал К1 выполняет заказ под
управлением оператора F1; к – канал К1 выполняет заказ под
управлением оператора F2; л – канал К3 выполняет заказ
под управлением оператора F1; м – канал К3 выполняет
заказ под управлением оператора F2.
1 – заказ поступил в систему; 2 – F1 начал выполнение
заказа на ; 3 – F1 закончил выполнение заказа на К1; 4 – F2
начал выполнение заказа на К1; 5 – F2 закончил выполнение
заказа на К1; 6 – F1 начал выполнение заказа на К2; 7 – F1
закончил выполнение заказа на К2; 8 – F2 начал выполнение
заказа на К3; 9 – F2 закончил выполнение заказа на К3; 10 –
заказ покинул систему.
18.
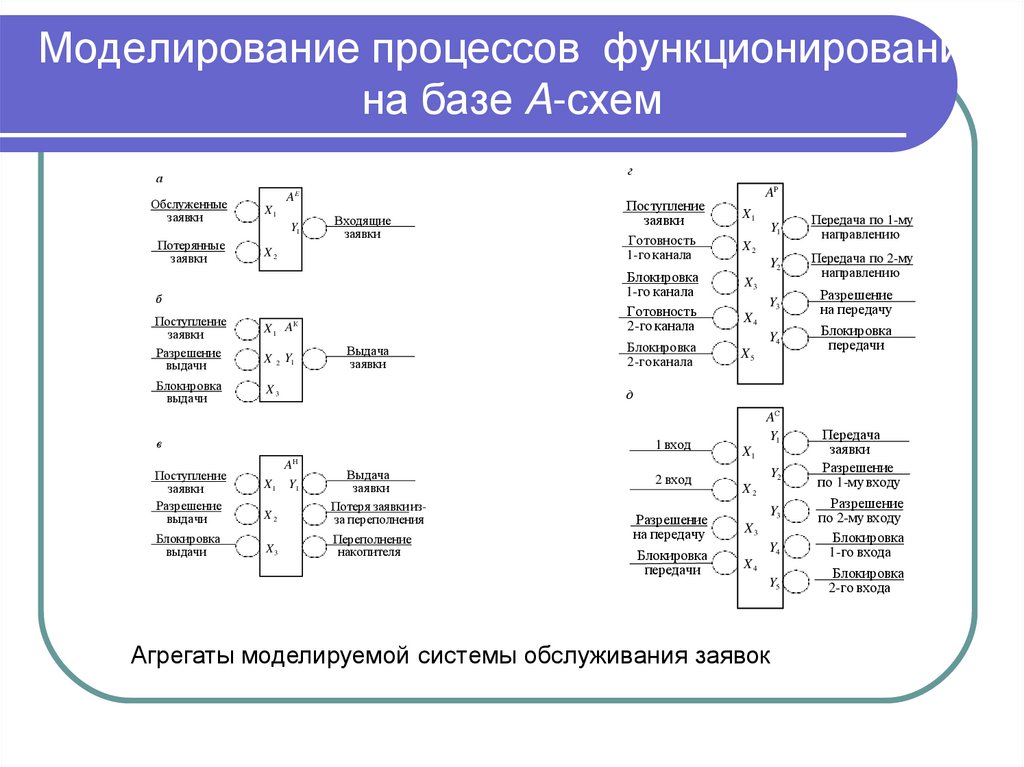
Моделирование процессов функционированияна базе A-схем
г
а
AE
Обслуженные
заявки
X1
Потерянные
заявки
X2
Поступление
заявки
Готовность
1-го канала
Поступление
заявки
Разрешение
выдачи
X 1 AК
Блокировка
1-го канала
Готовность
2-го канала
Блокировка
выдачи
X3
Y1
Входящие
заявки
б
X 2 Y1
Выдача
заявки
1 вход
Блокировка
выдачи
AН
X 1 Y1
X1
Y1
Передача по 1-му
направлению
Y2
Передача по 2-му
направлению
Y3
Разрешение
на передачу
Y4
Блокировка
передачи
X2
X3
X4
X5
д
в
Поступление
заявки
Разрешение
выдачи
Блокировка
2-го канала
AР
X2
Выдача
заявки
Потеря заявкиизза переполнения
X3
Переполнение
накопителя
2 вход
AС
Y1
X1
Y2
X2
Y4
Разрешение
по 2-му входу
Блокировка
1-го входа
Y5
Блокировка
2-го входа
Y3
Разрешение
на передачу
X3
Блокировка
передачи
X4
Передача
заявки
Разрешение
по 1-му входу
Агрегаты моделируемой системы обслуживания заявок
19.
Временная сетьПрименяемое для моделирования конечных во
времени процессов расширение сети Петри. В
такой сети дополнительно вводится множество
возможных моментов времени и множество
временных задержек, соответствующих
определенному состоянию в определенный
момент времени. Переход метки в позицию
переводит ее в пассивное состояние на время
задержки, в течение которого переход из этой
позиции совершаться не может. Разновидностью
временных сетей является сеть Мерлина, в
которой время задержки определяется случайным
числом из заданного диапазона.