 mechanics
mechanicsSimilar presentations:
")

")
")
")





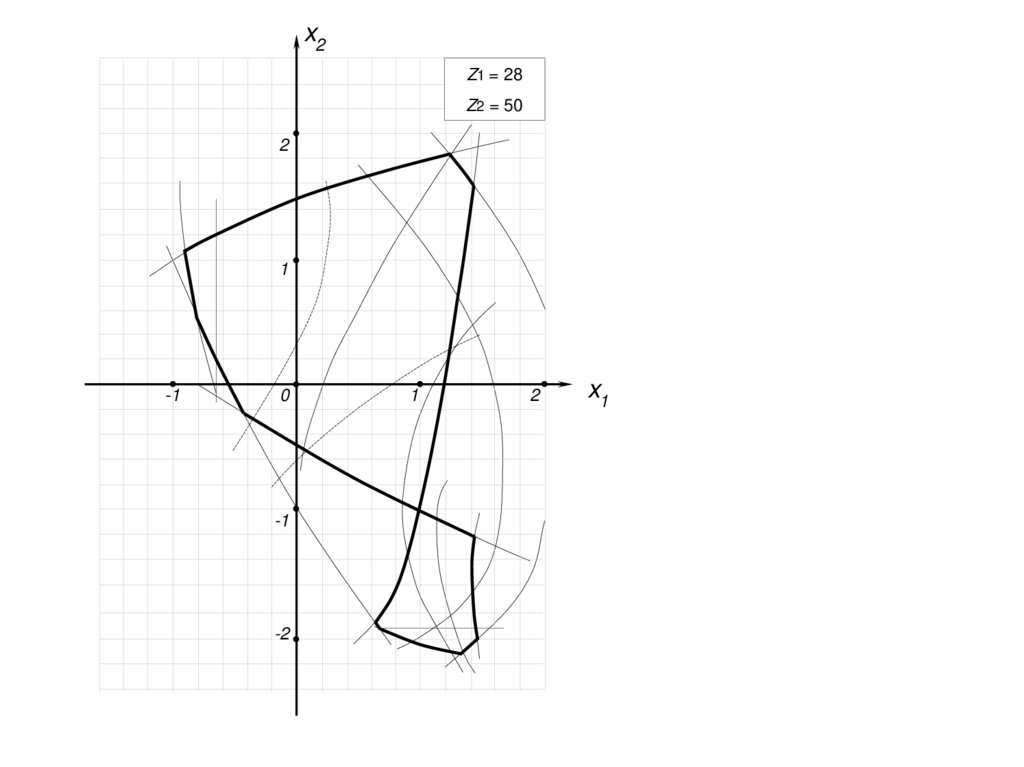
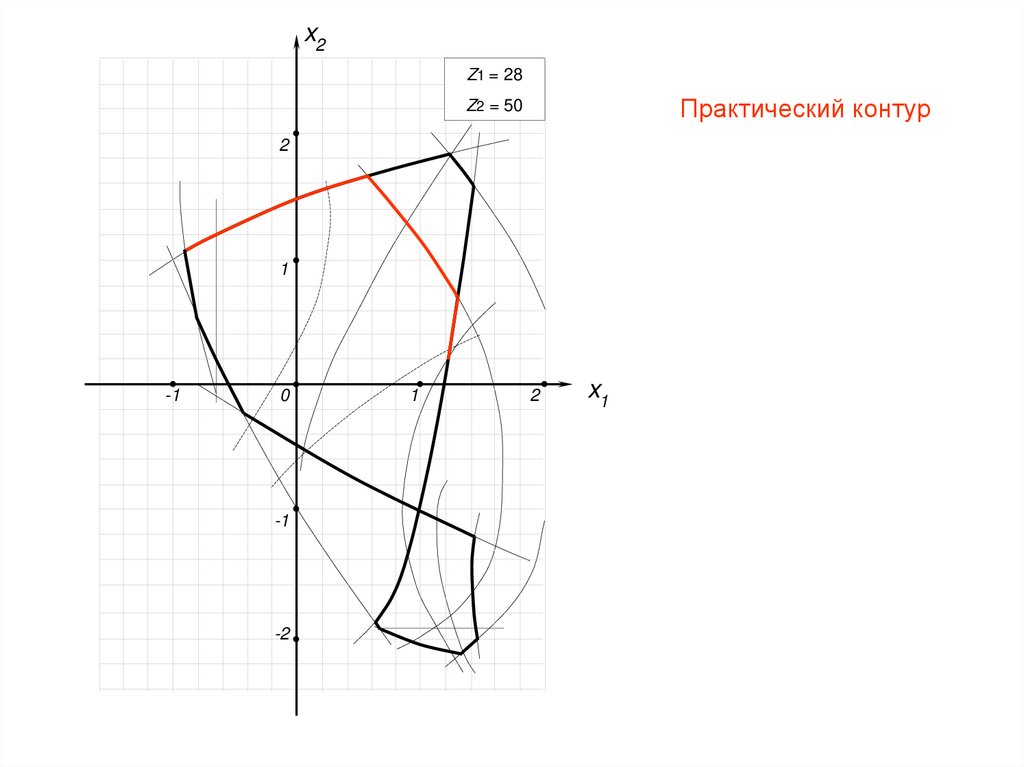
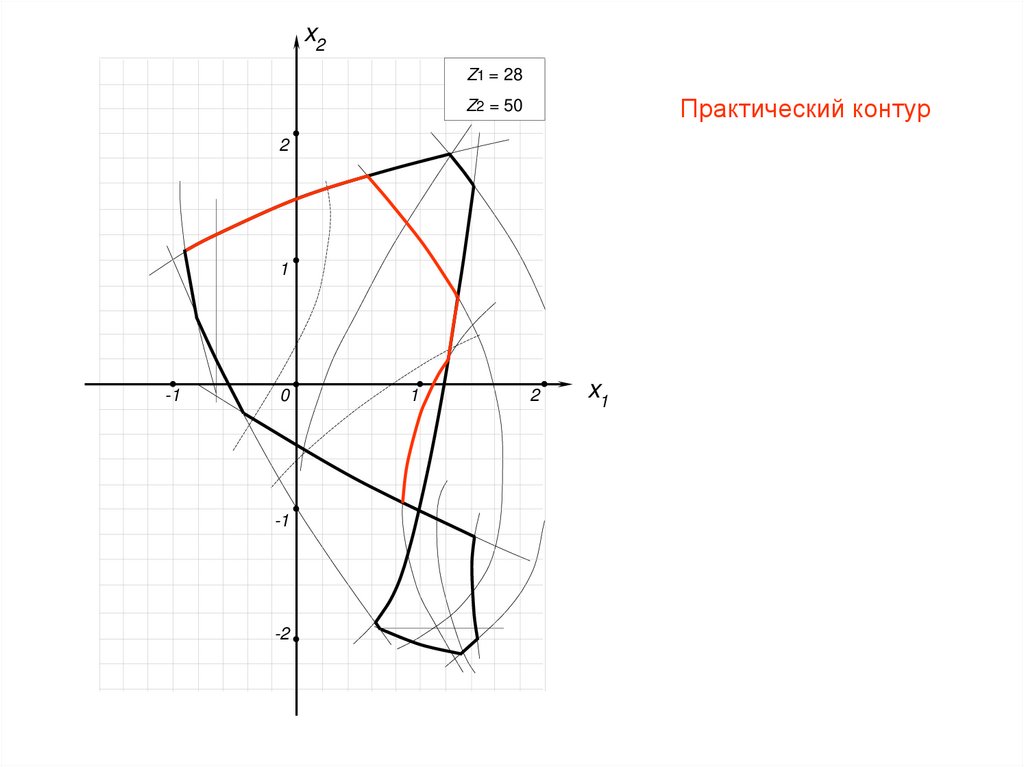
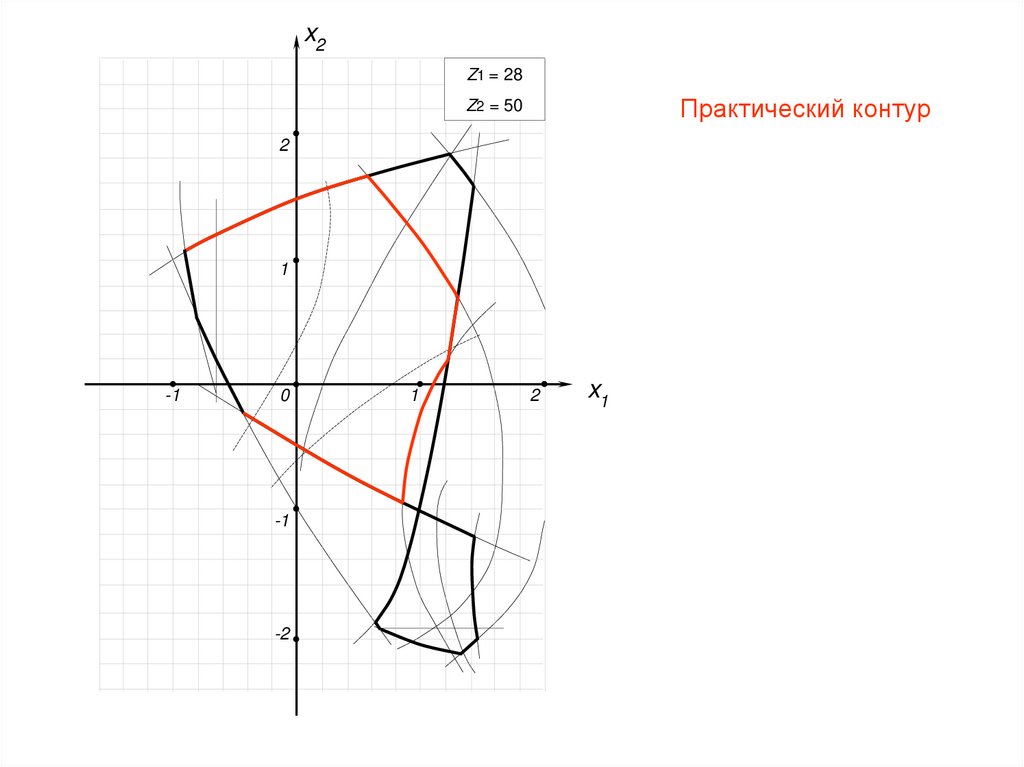
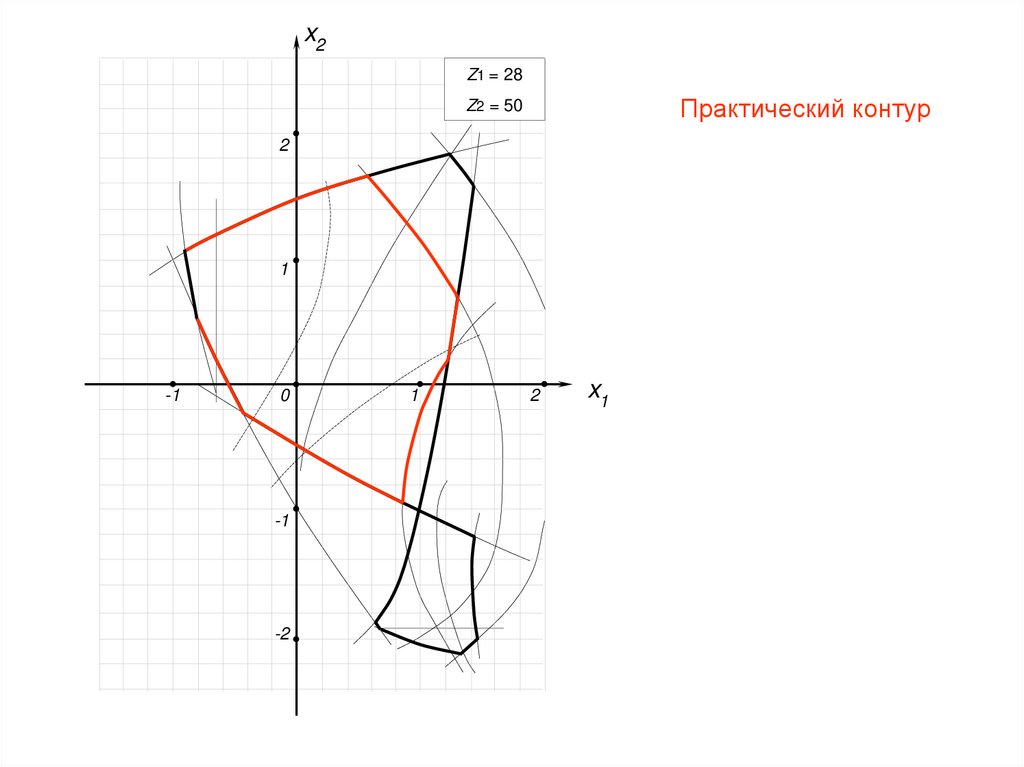
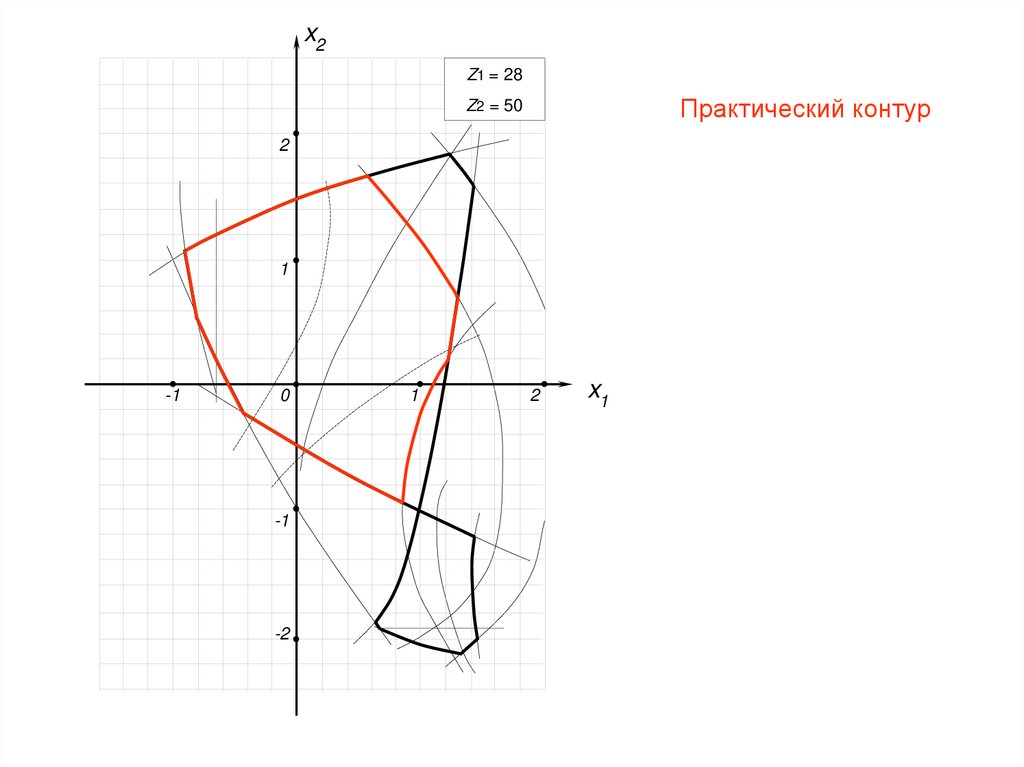
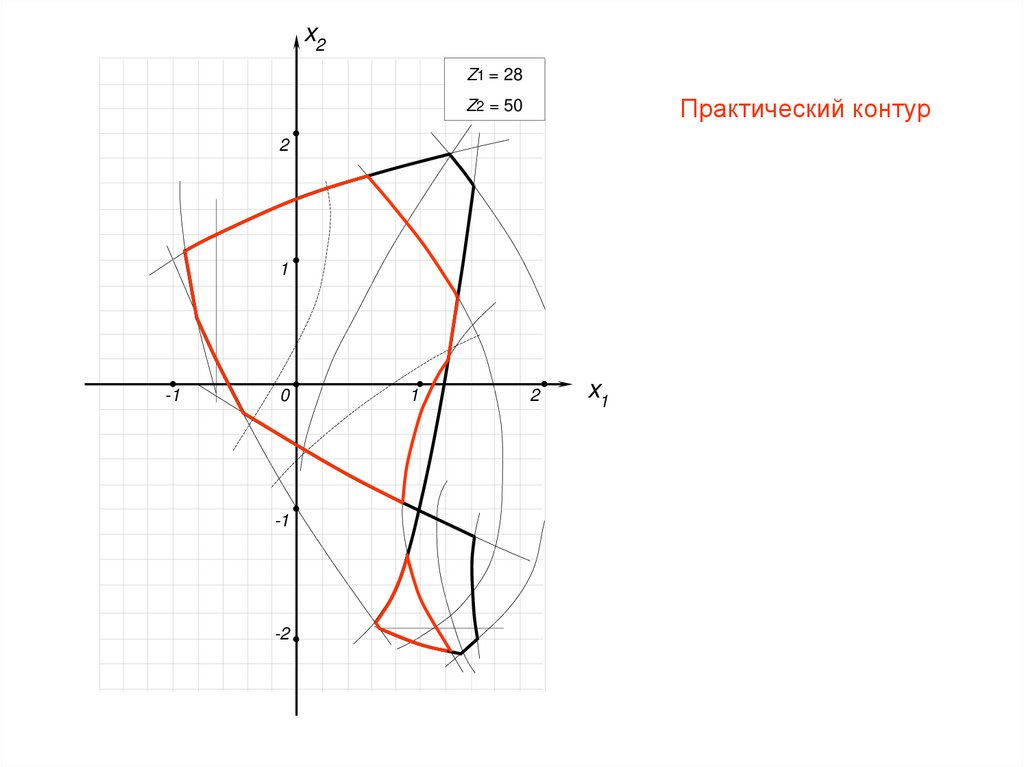
Практический контур
1.
x2Z1 = 28
Z2 = 50
2
1
-1
0
-1
-2
1
2
x1
2.
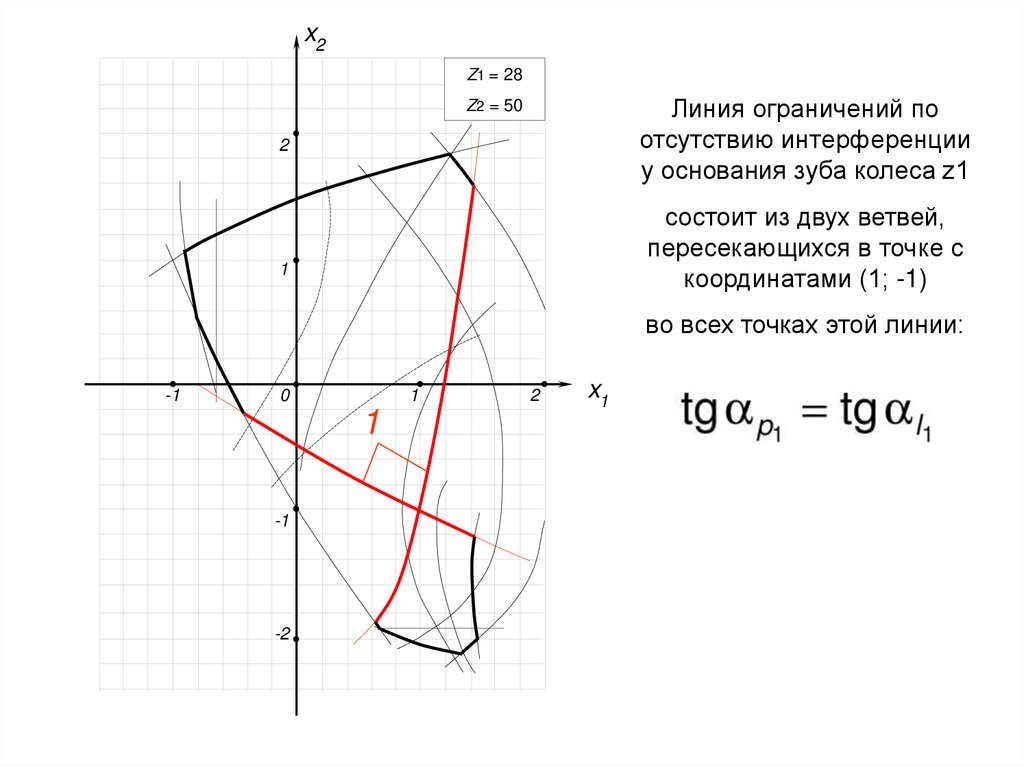
x2Z1 = 28
Линия ограничений по
отсутствию интерференции
у основания зуба колеса z1
Z2 = 50
2
состоит из двух ветвей,
пересекающихся в точке с
координатами (1; -1)
1
во всех точках этой линии:
-1
0
1
1
-1
-2
2
x1
3.
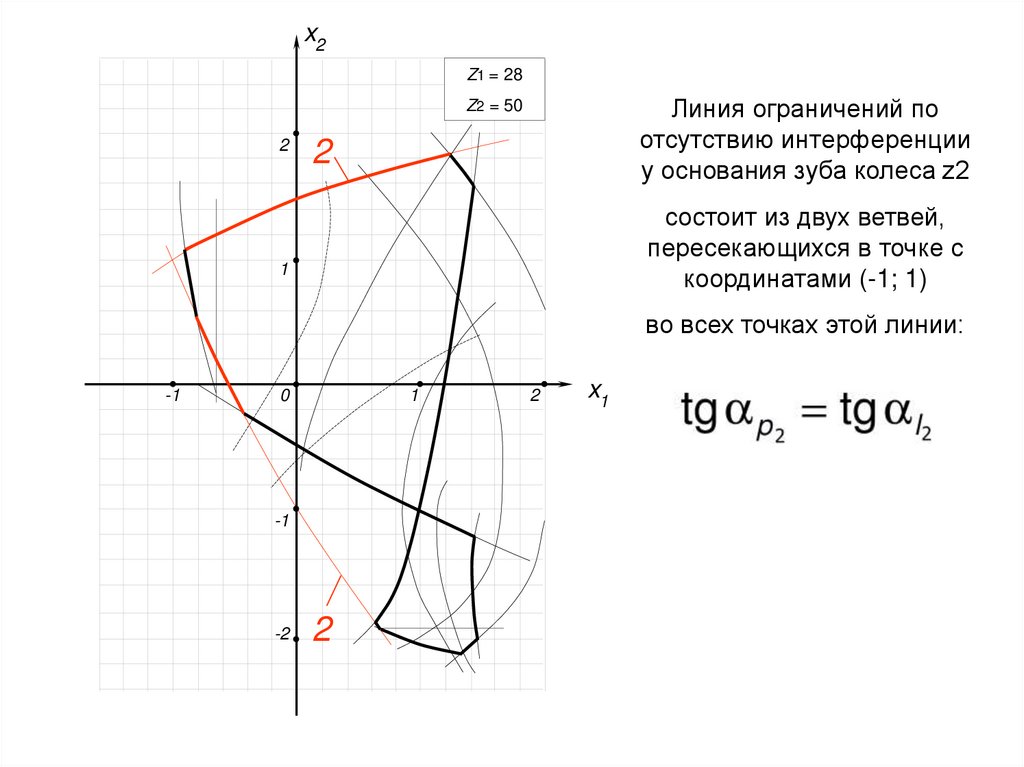
x2Z1 = 28
Линия ограничений по
отсутствию интерференции
у основания зуба колеса z2
Z2 = 50
2
2
состоит из двух ветвей,
пересекающихся в точке с
координатами (-1; 1)
1
во всех точках этой линии:
-1
0
1
-1
-2
2
2
x1
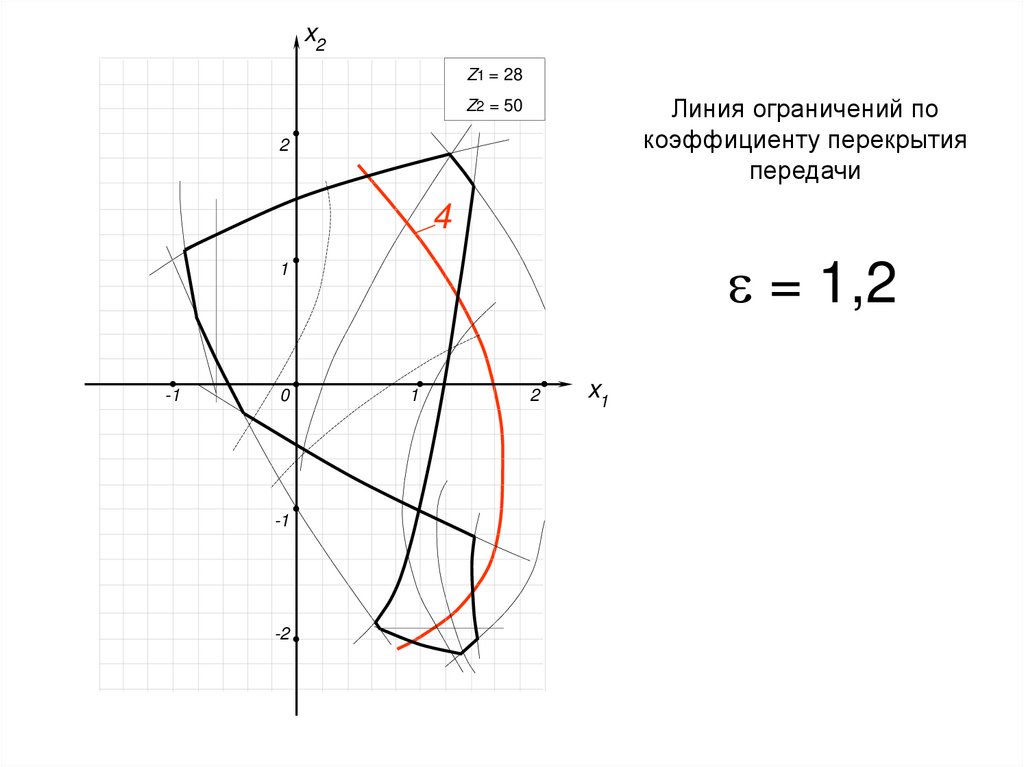
4.
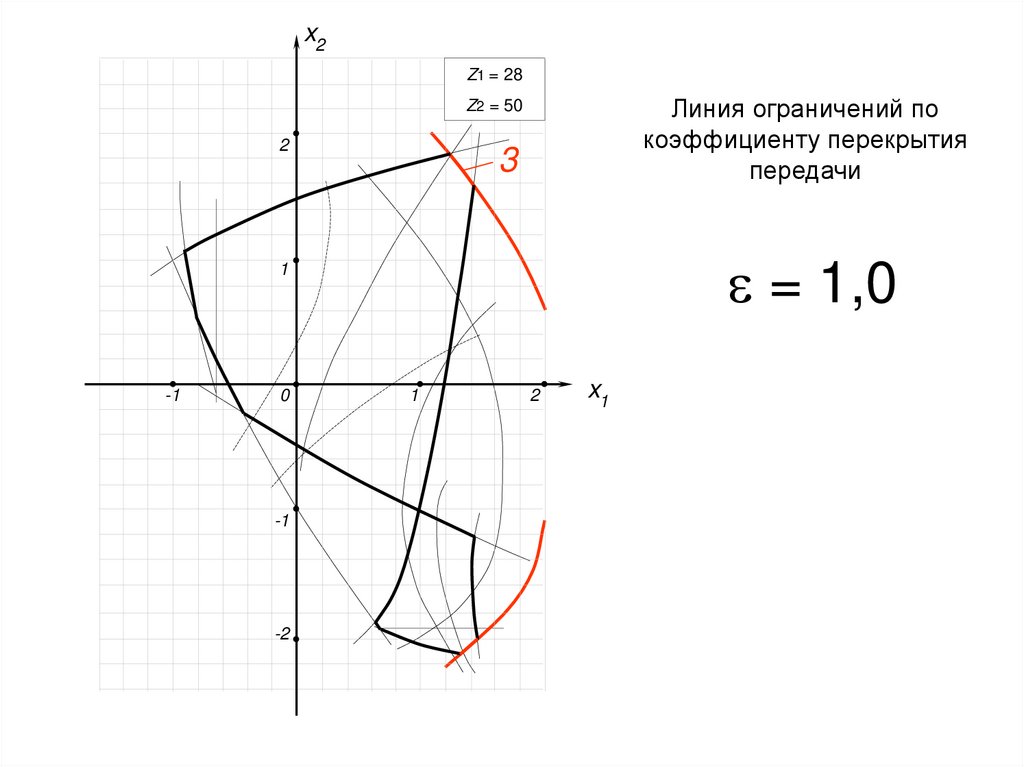
x2Z1 = 28
Линия ограничений по
коэффициенту перекрытия
передачи
Z2 = 50
2
3
= 1,0
1
-1
0
-1
-2
1
2
x1
5.
x2Z1 = 28
Линия ограничений по
коэффициенту перекрытия
передачи
Z2 = 50
2
4
= 1,2
1
-1
0
-1
-2
1
2
x1
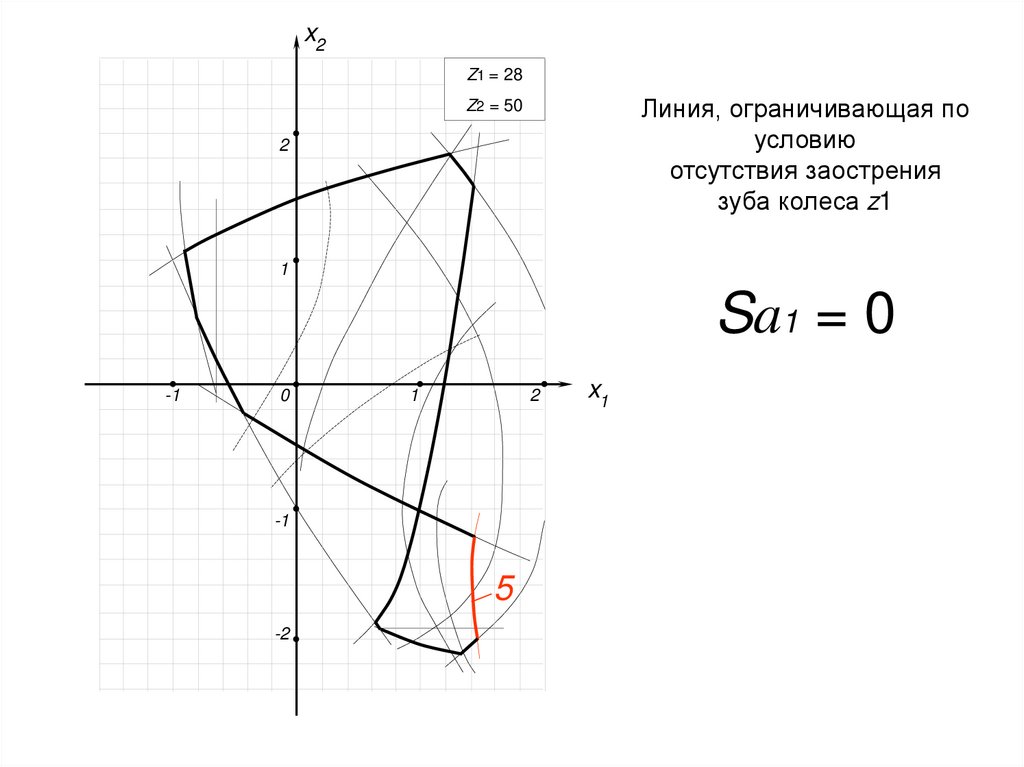
6.
x2Z1 = 28
Линия, ограничивающая по
условию
отсутствия заострения
зуба колеса z1
Z2 = 50
2
1
Sa1 = 0
-1
0
1
2
-1
5
-2
x1
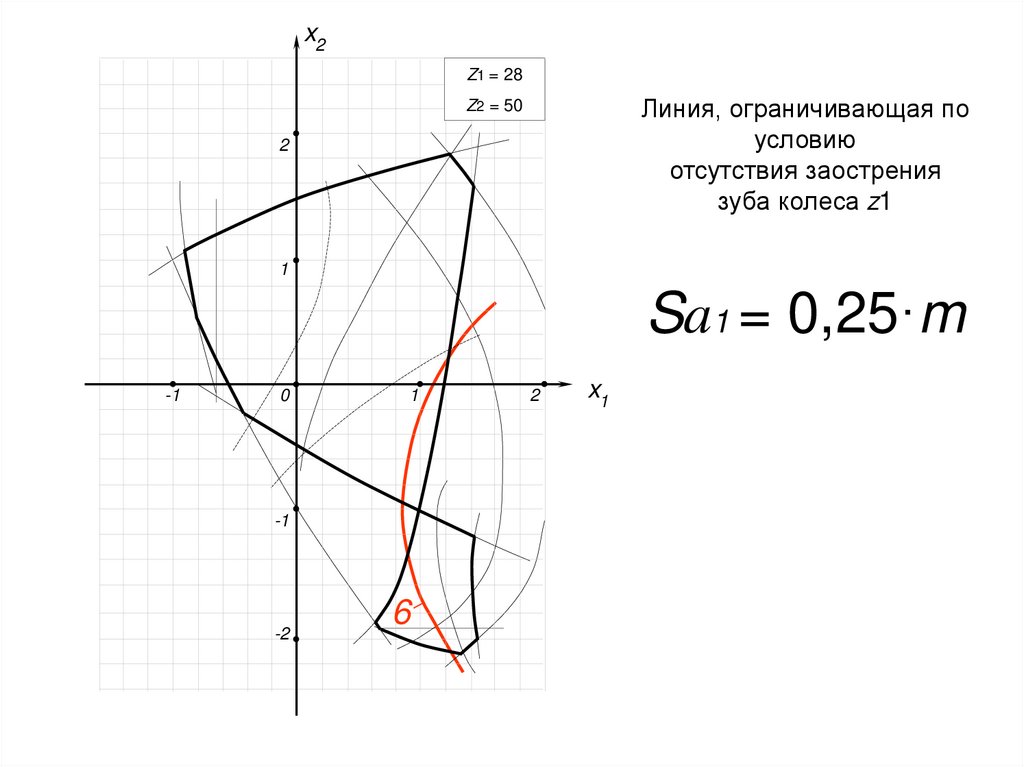
7.
x2Z1 = 28
Линия, ограничивающая по
условию
отсутствия заострения
зуба колеса z1
Z2 = 50
2
1
Sa1 = 0,25·m
-1
0
1
-1
-2
6
2
x1
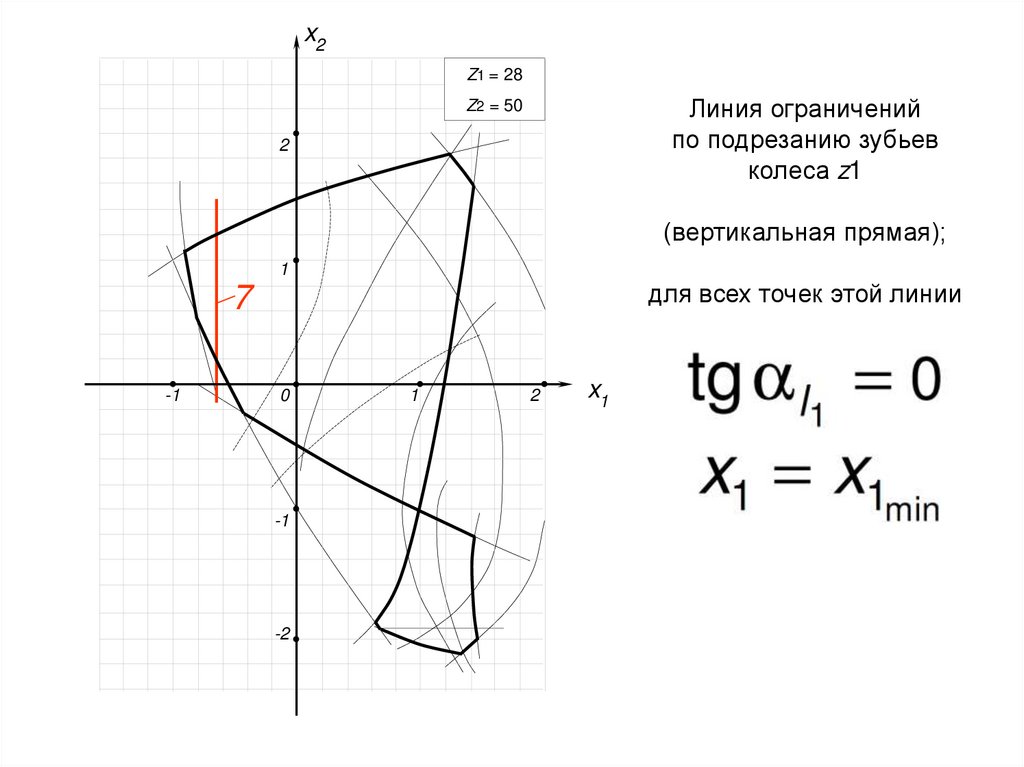
8.
x2Z1 = 28
Линия ограничений
по подрезанию зубьев
колеса z1
Z2 = 50
2
(вертикальная прямая);
1
для всех точек этой линии
7
-1
0
-1
-2
1
2
x1
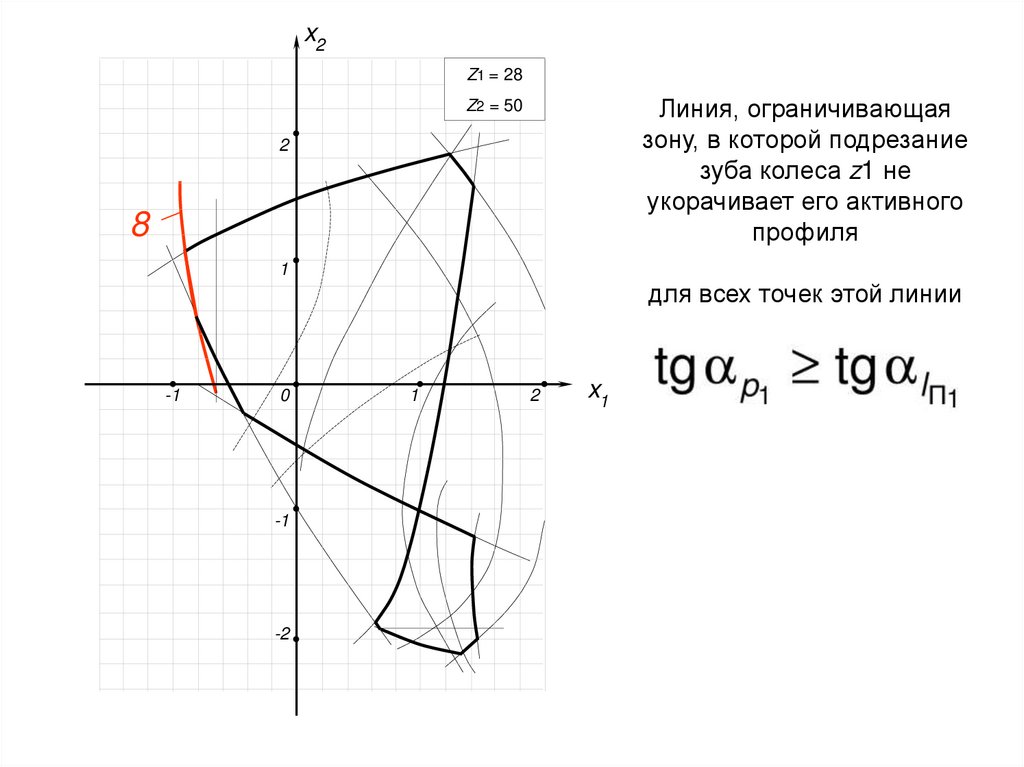
9.
x2Z1 = 28
Линия, ограничивающая
зону, в которой подрезание
зуба колеса z1 не
укорачивает его активного
профиля
Z2 = 50
2
8
1
для всех точек этой линии
-1
0
-1
-2
1
2
x1
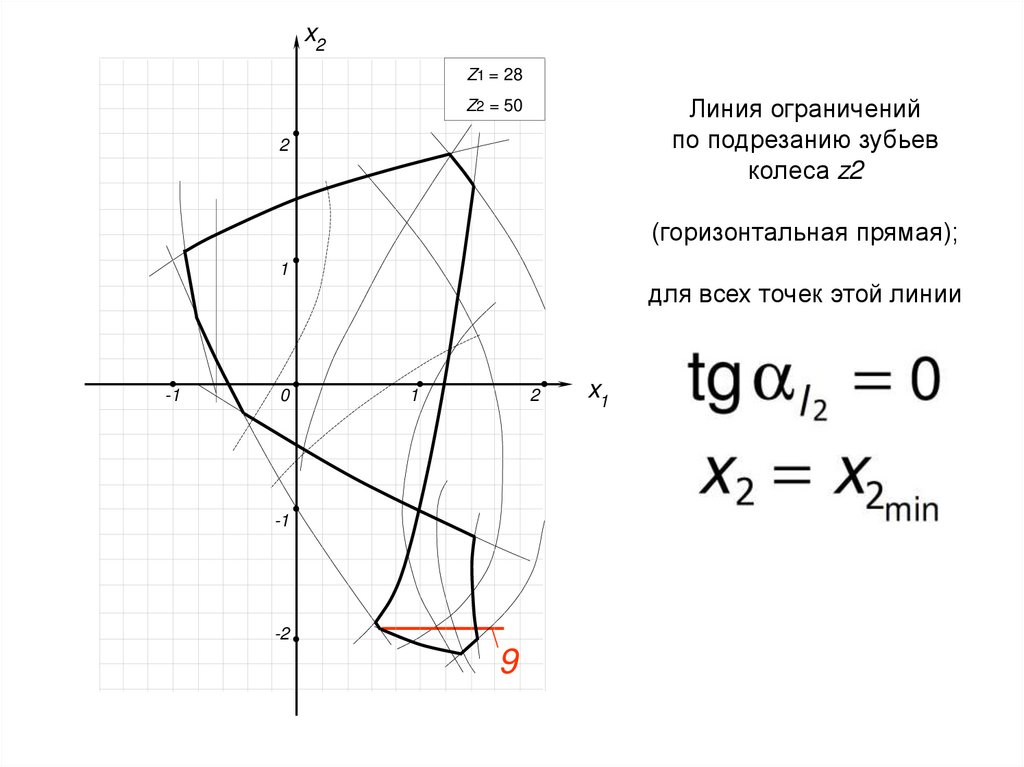
10.
x2Z1 = 28
Линия ограничений
по подрезанию зубьев
колеса z2
Z2 = 50
2
(горизонтальная прямая);
1
для всех точек этой линии
-1
0
1
2
-1
-2
9
x1
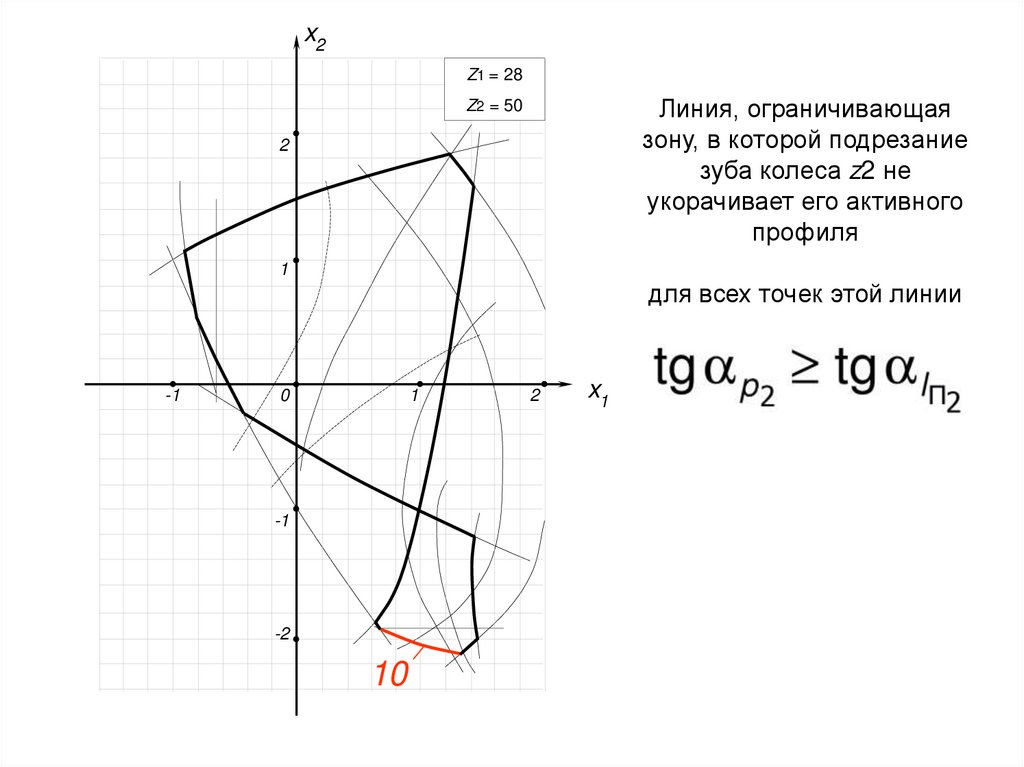
11.
x2Z1 = 28
Линия, ограничивающая
зону, в которой подрезание
зуба колеса z2 не
укорачивает его активного
профиля
Z2 = 50
2
1
для всех точек этой линии
-1
0
1
-1
-2
10
2
x1
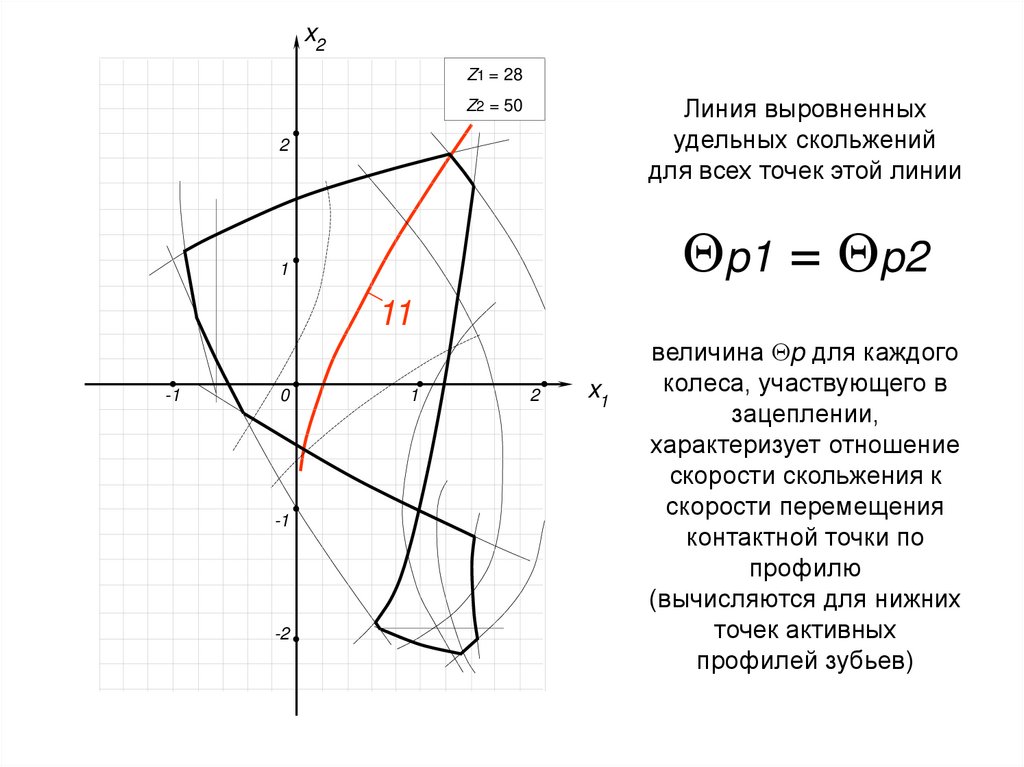
12.
x2Z1 = 28
Линия выровненных
удельных скольжений
для всех точек этой линии
Z2 = 50
2
p1 = p2
1
11
-1
0
-1
-2
1
2
x1
величина p для каждого
колеса, участвующего в
зацеплении,
характеризует отношение
скорости скольжения к
скорости перемещения
контактной точки по
профилю
(вычисляются для нижних
точек активных
профилей зубьев)
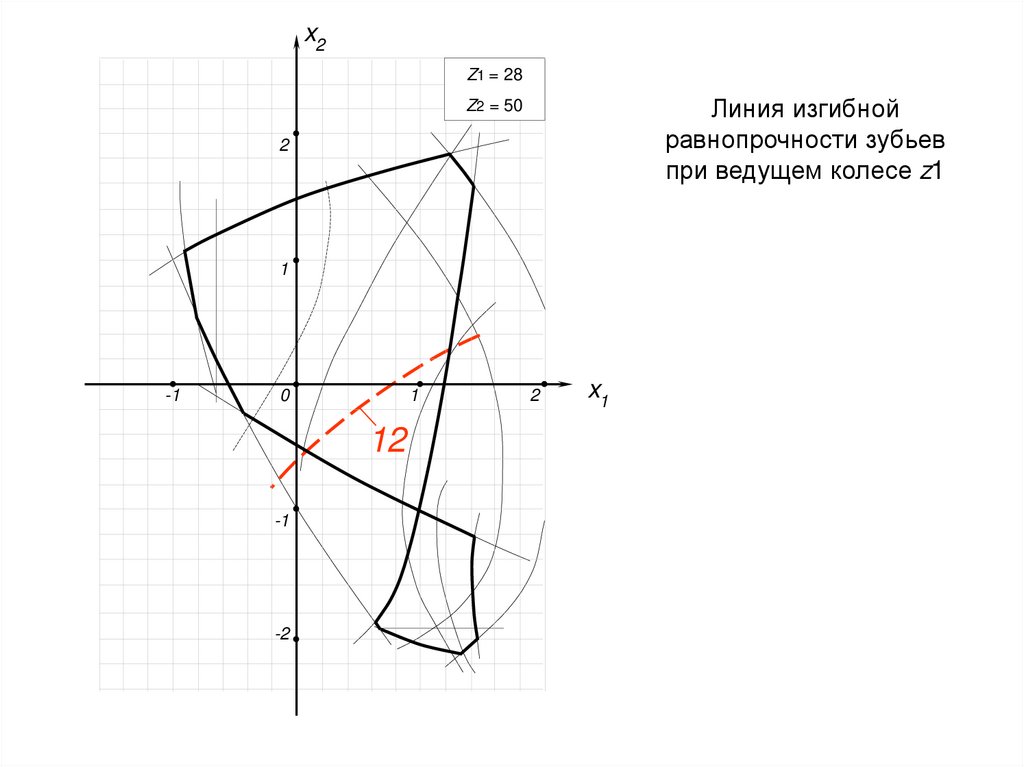
13.
x2Z1 = 28
Линия изгибной
равнопрочности зубьев
при ведущем колесе z1
Z2 = 50
2
1
-1
0
1
12
-1
-2
2
x1
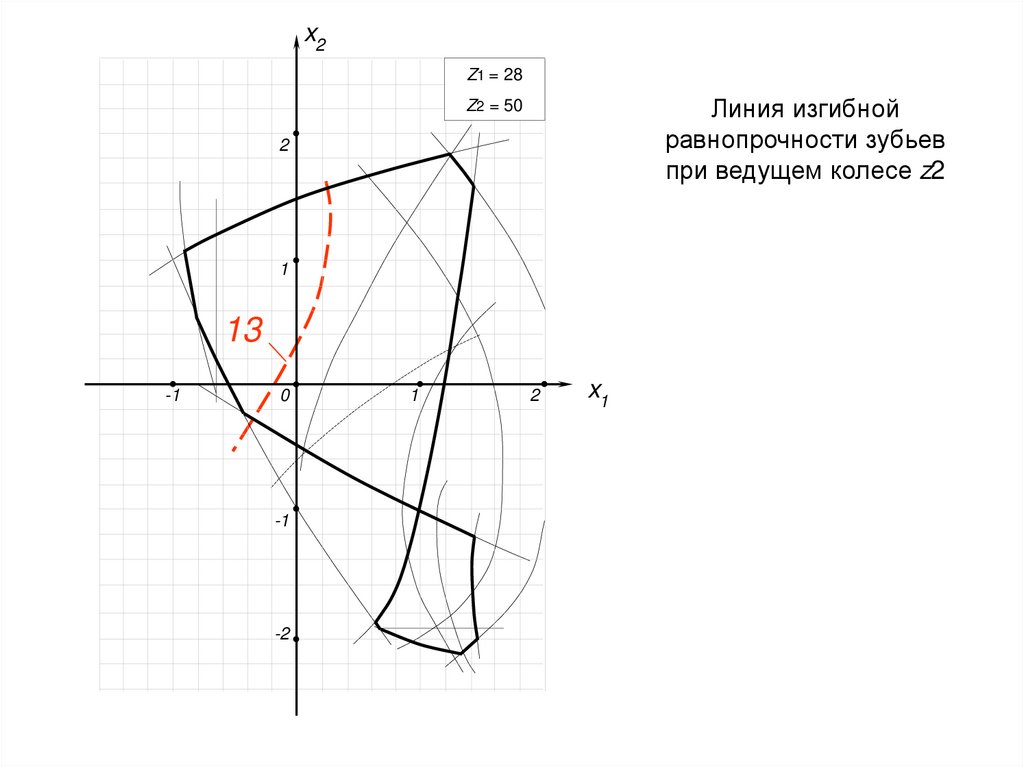
14.
x2Z1 = 28
Линия изгибной
равнопрочности зубьев
при ведущем колесе z2
Z2 = 50
2
1
13
-1
0
-1
-2
1
2
x1
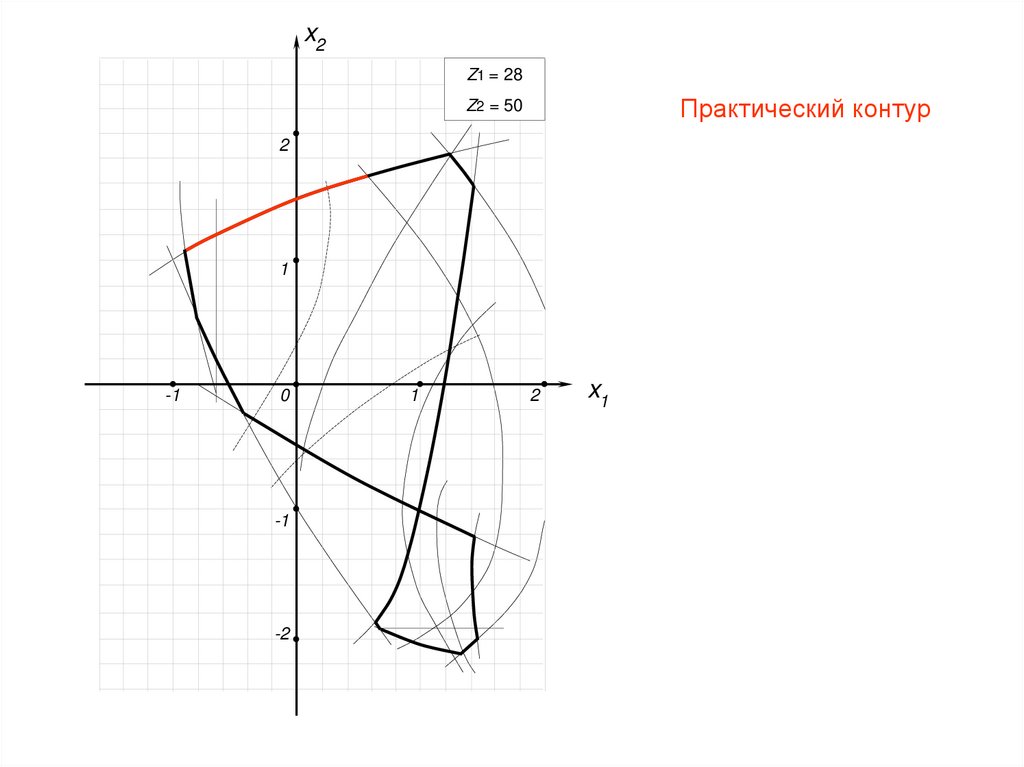
15.
x2Z1 = 28
Практический контур
Z2 = 50
2
1
-1
0
-1
-2
1
2
x1
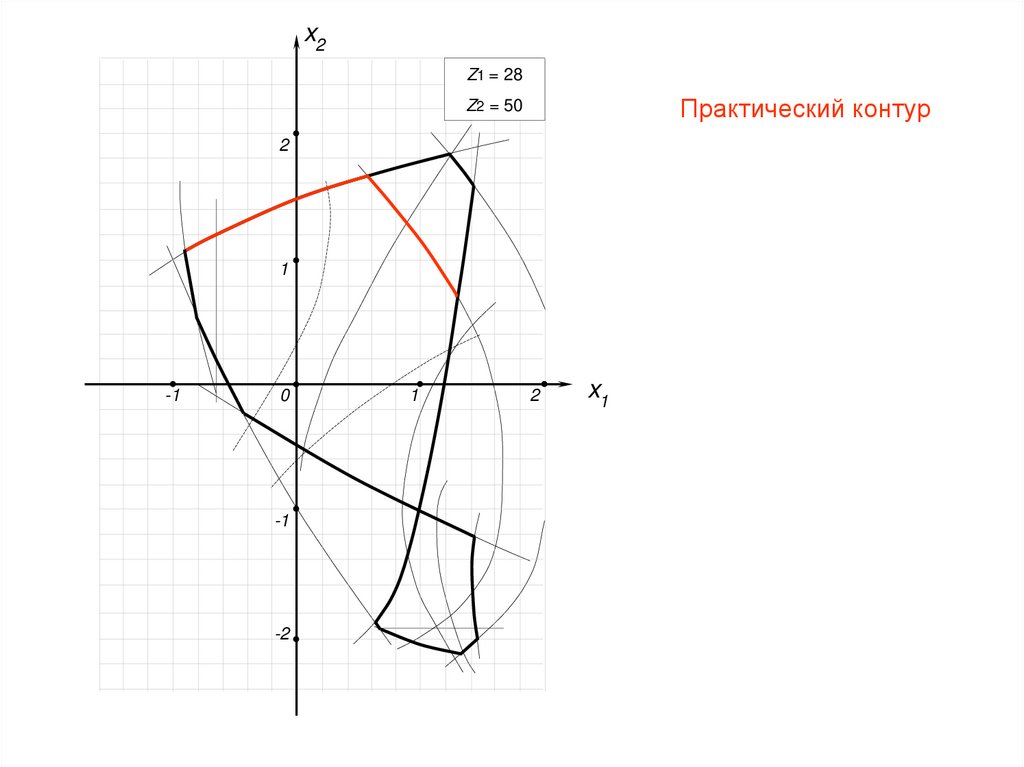
16.
x2Z1 = 28
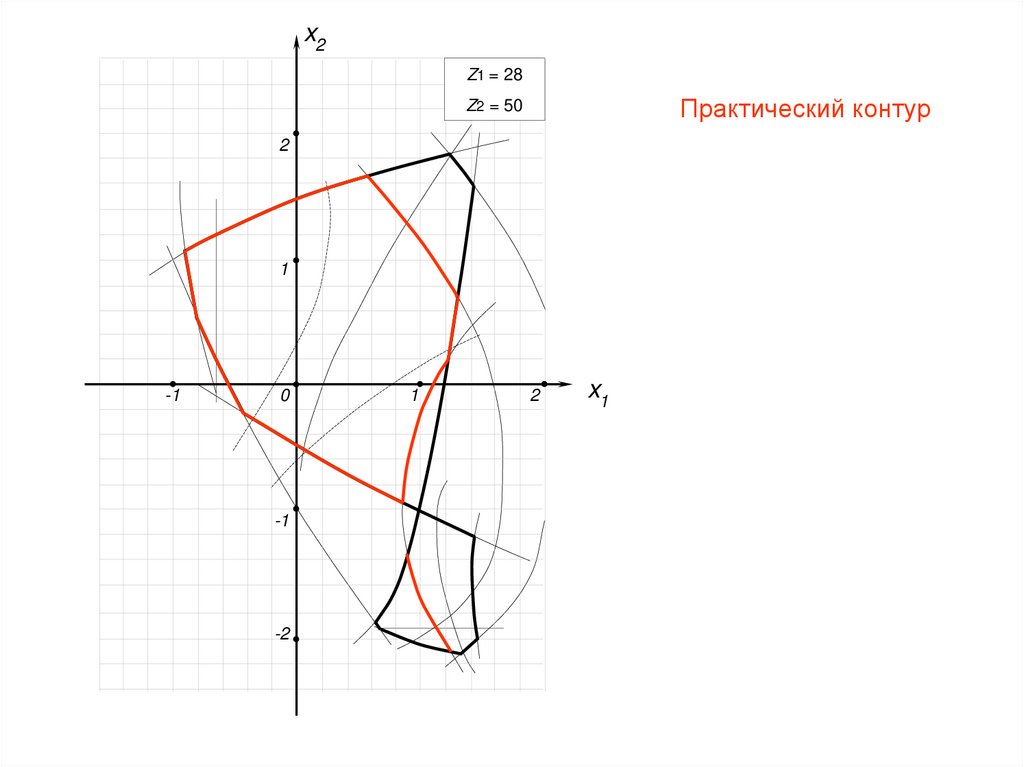
Практический контур
Z2 = 50
2
1
-1
0
-1
-2
1
2
x1
17.
x2Z1 = 28
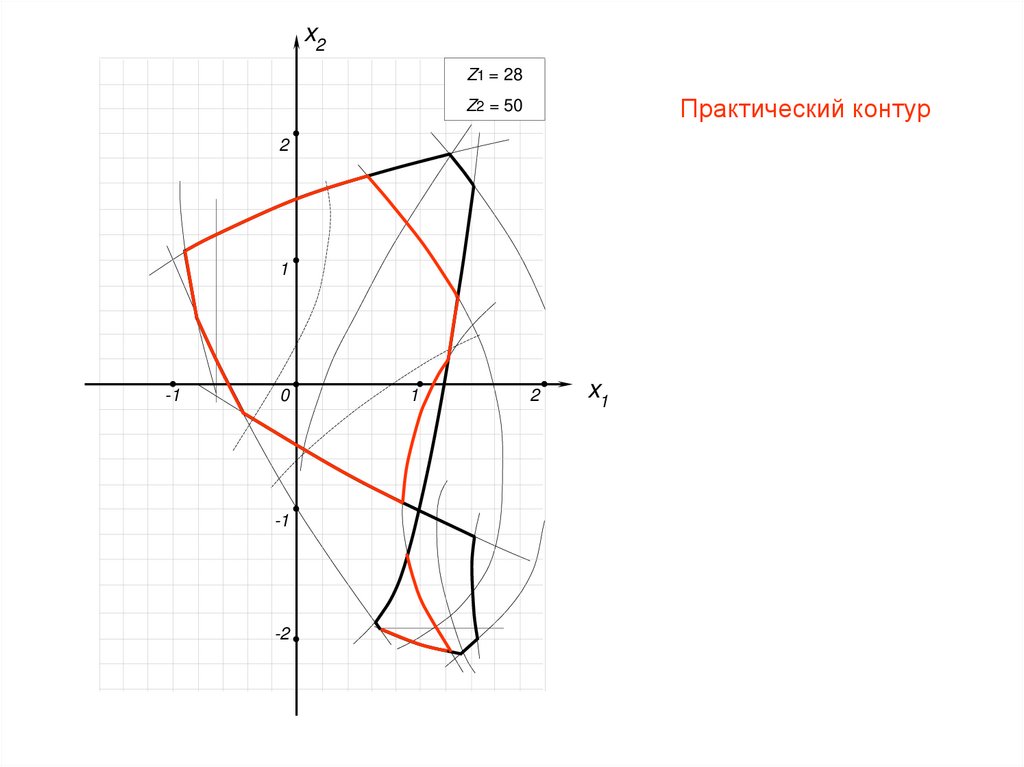
Практический контур
Z2 = 50
2
1
-1
0
-1
-2
1
2
x1
18.
x2Z1 = 28
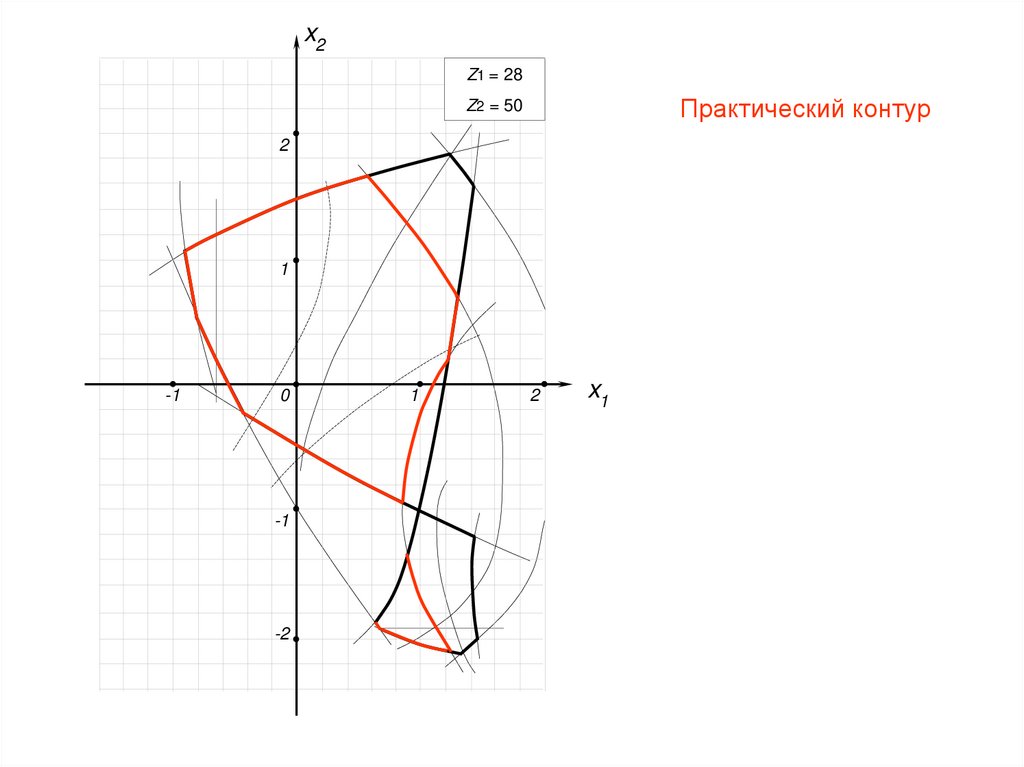
Практический контур
Z2 = 50
2
1
-1
0
-1
-2
1
2
x1
19.
x2Z1 = 28
Практический контур
Z2 = 50
2
1
-1
0
-1
-2
1
2
x1
20.
x2Z1 = 28
Практический контур
Z2 = 50
2
1
-1
0
-1
-2
1
2
x1
21.
x2Z1 = 28
Практический контур
Z2 = 50
2
1
-1
0
-1
-2
1
2
x1
22.
x2Z1 = 28
Практический контур
Z2 = 50
2
1
-1
0
-1
-2
1
2
x1
23.
x2Z1 = 28
Практический контур
Z2 = 50
2
1
-1
0
-1
-2
1
2
x1
24.
x2Z1 = 28
Практический контур
Z2 = 50
2
1
-1
0
-1
-2
1
2
x1
25.
x2Z1 = 28
Практический контур
Z2 = 50
2
1
-1
0
-1
-2
1
2
x1
26.
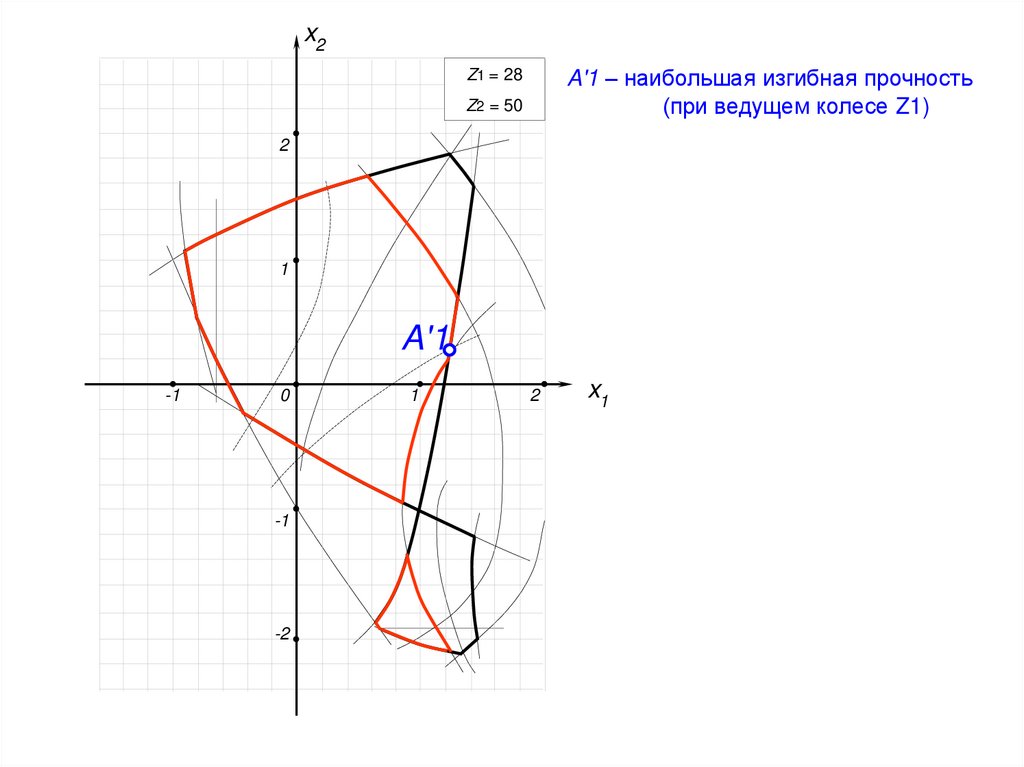
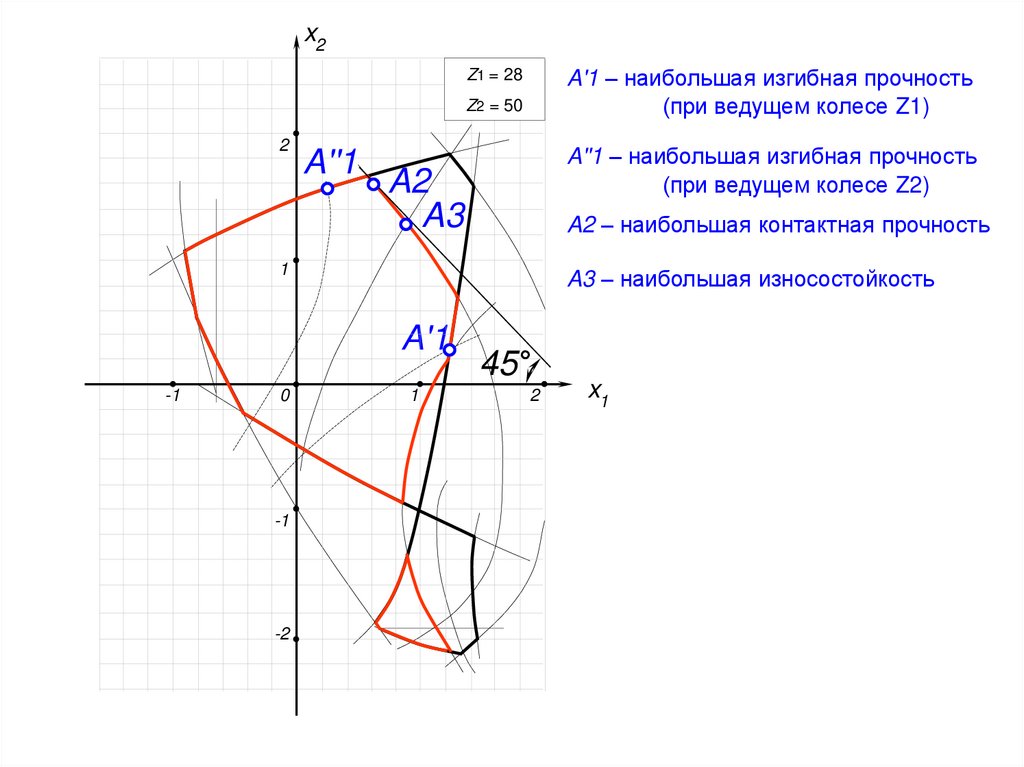
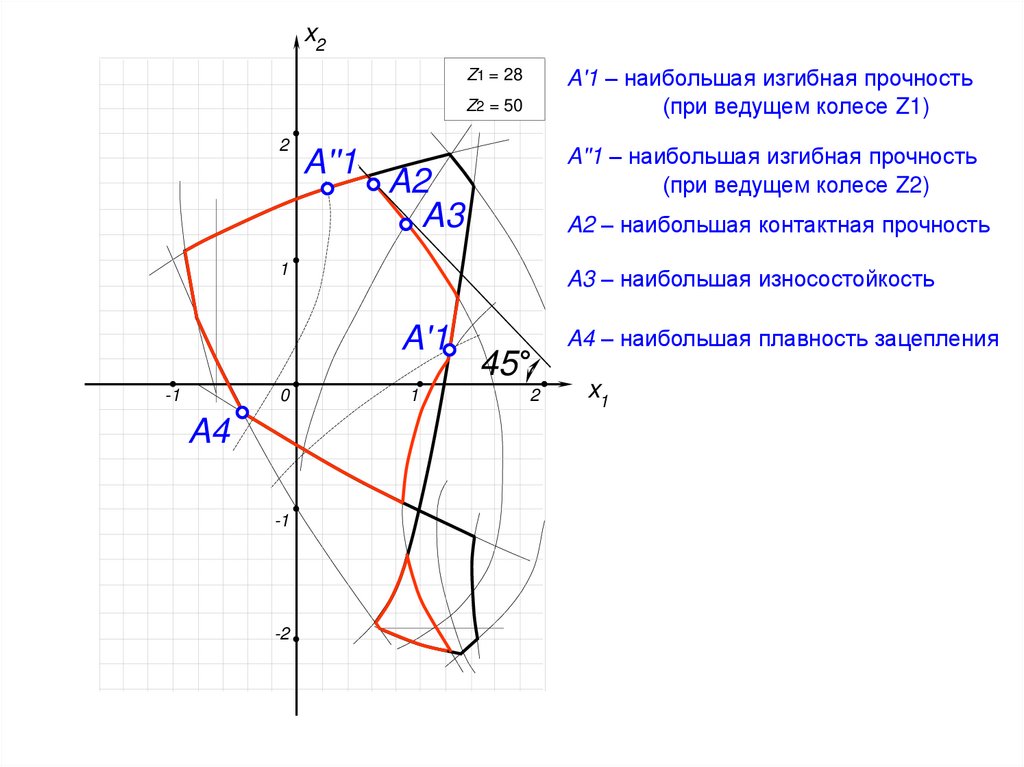
x2A'1 – наибольшая изгибная прочность
(при ведущем колесе Z1)
Z1 = 28
Z2 = 50
2
1
A'1
-1
0
-1
-2
1
2
x1
27.
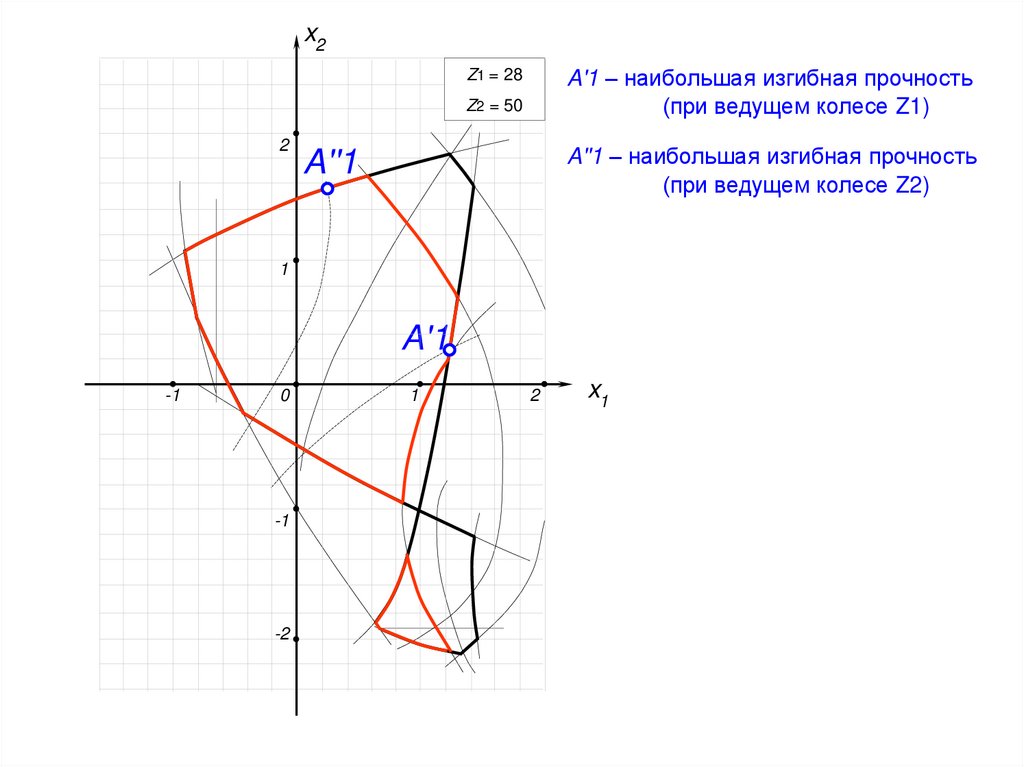
x2A'1 – наибольшая изгибная прочность
(при ведущем колесе Z1)
Z1 = 28
Z2 = 50
2
A''1 – наибольшая изгибная прочность
(при ведущем колесе Z2)
A''1
1
A'1
-1
0
-1
-2
1
2
x1
28.
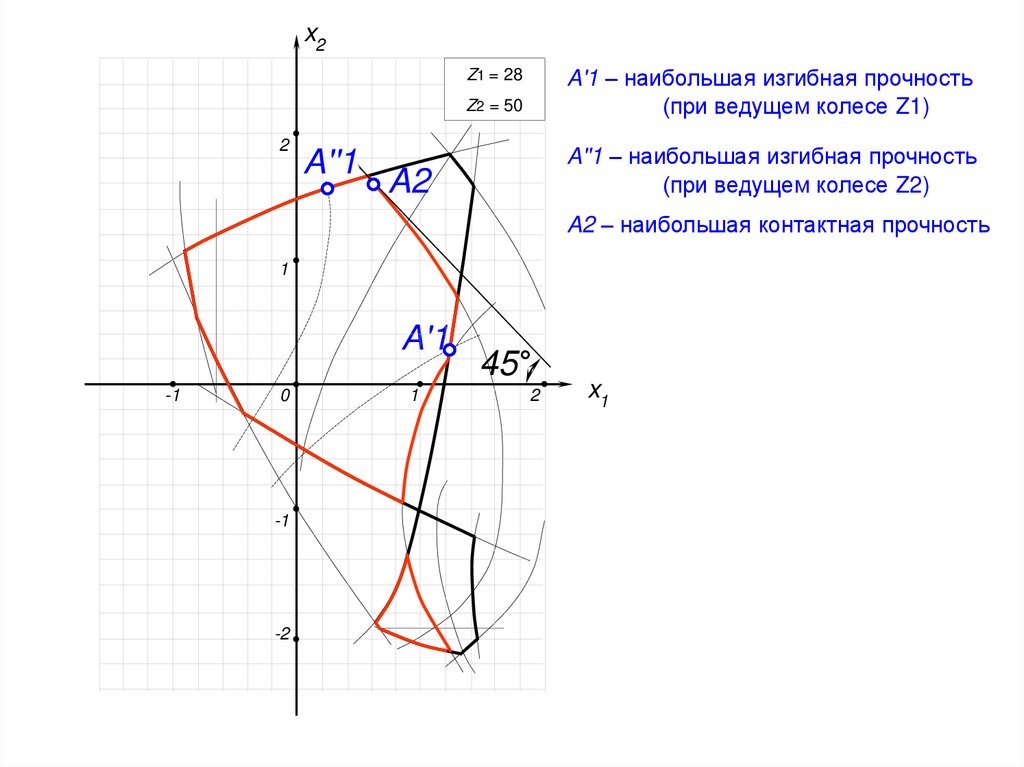
x2A'1 – наибольшая изгибная прочность
(при ведущем колесе Z1)
Z1 = 28
Z2 = 50
2
A''1
A''1 – наибольшая изгибная прочность
(при ведущем колесе Z2)
A2
A2 – наибольшая контактная прочность
1
A'1
-1
0
-1
-2
1
45°
2
x1
29.
x2A'1 – наибольшая изгибная прочность
(при ведущем колесе Z1)
Z1 = 28
Z2 = 50
2
A''1
A''1 – наибольшая изгибная прочность
(при ведущем колесе Z2)
A2
A3
A2 – наибольшая контактная прочность
1
A3 – наибольшая износостойкость
A'1
-1
0
-1
-2
1
45°
2
x1
30.
x2A'1 – наибольшая изгибная прочность
(при ведущем колесе Z1)
Z1 = 28
Z2 = 50
2
A''1
A''1 – наибольшая изгибная прочность
(при ведущем колесе Z2)
A2
A3
A2 – наибольшая контактная прочность
1
A3 – наибольшая износостойкость
A'1
-1
0
A4
-1
-2
1
45°
2
A4 – наибольшая плавность зацепления
x1
31.
x2Z1 = 28
Z2 = 50
2
A''1
A2
A3
1
0
A4
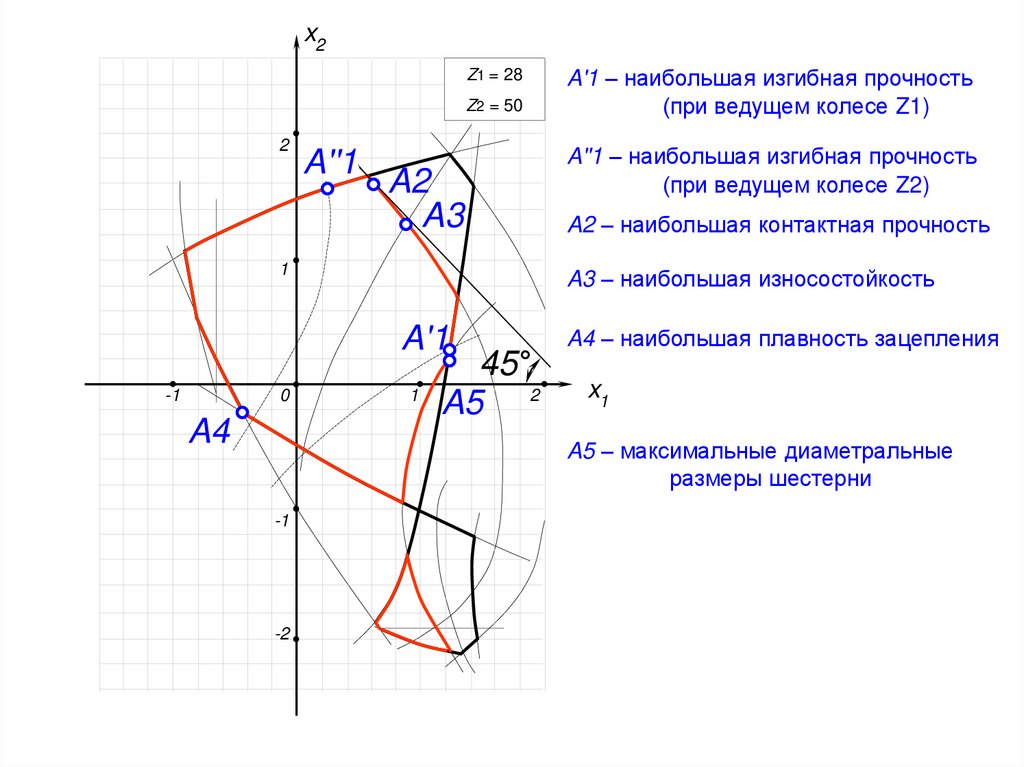
A''1 – наибольшая изгибная прочность
(при ведущем колесе Z2)
A2 – наибольшая контактная прочность
A3 – наибольшая износостойкость
A'1
-1
A'1 – наибольшая изгибная прочность
(при ведущем колесе Z1)
45°
1
A5 2
A4 – наибольшая плавность зацепления
x1
A5 – максимальные диаметральные
размеры шестерни
-1
-2
32.
x2Z1 = 28
Z2 = 50
2
A''1
A6
A2
A3
1
0
A4
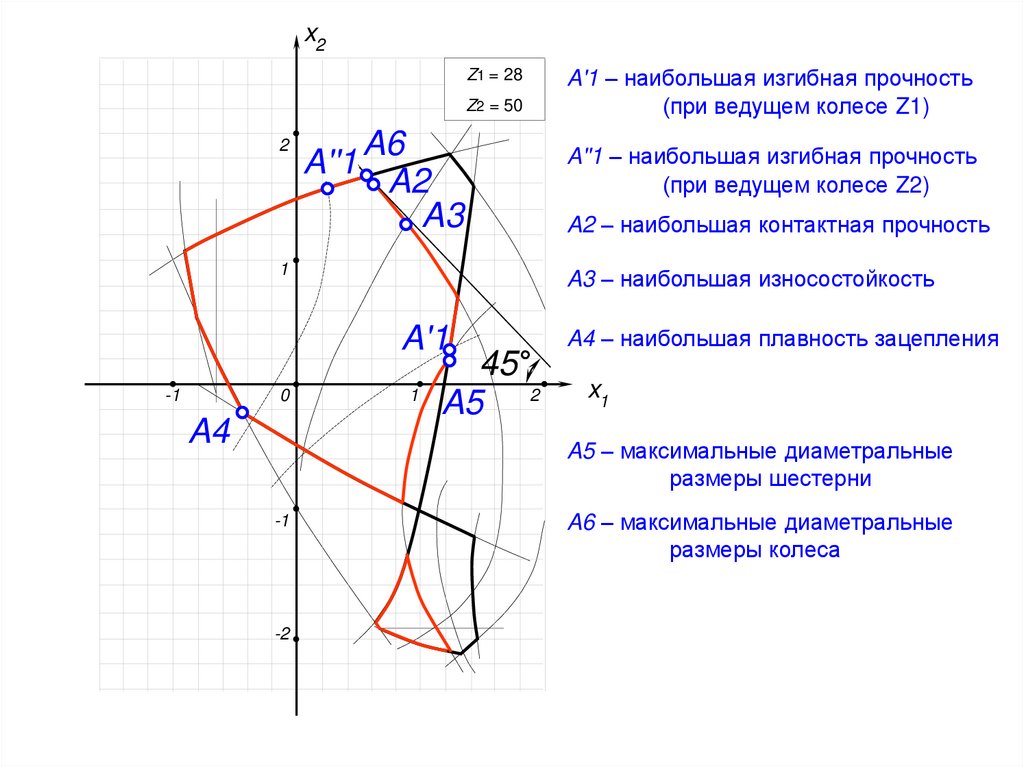
A''1 – наибольшая изгибная прочность
(при ведущем колесе Z2)
A2 – наибольшая контактная прочность
A3 – наибольшая износостойкость
A'1
-1
A'1 – наибольшая изгибная прочность
(при ведущем колесе Z1)
45°
1
A5 2
A4 – наибольшая плавность зацепления
x1
A5 – максимальные диаметральные
размеры шестерни
-1
-2
A6 – максимальные диаметральные
размеры колеса
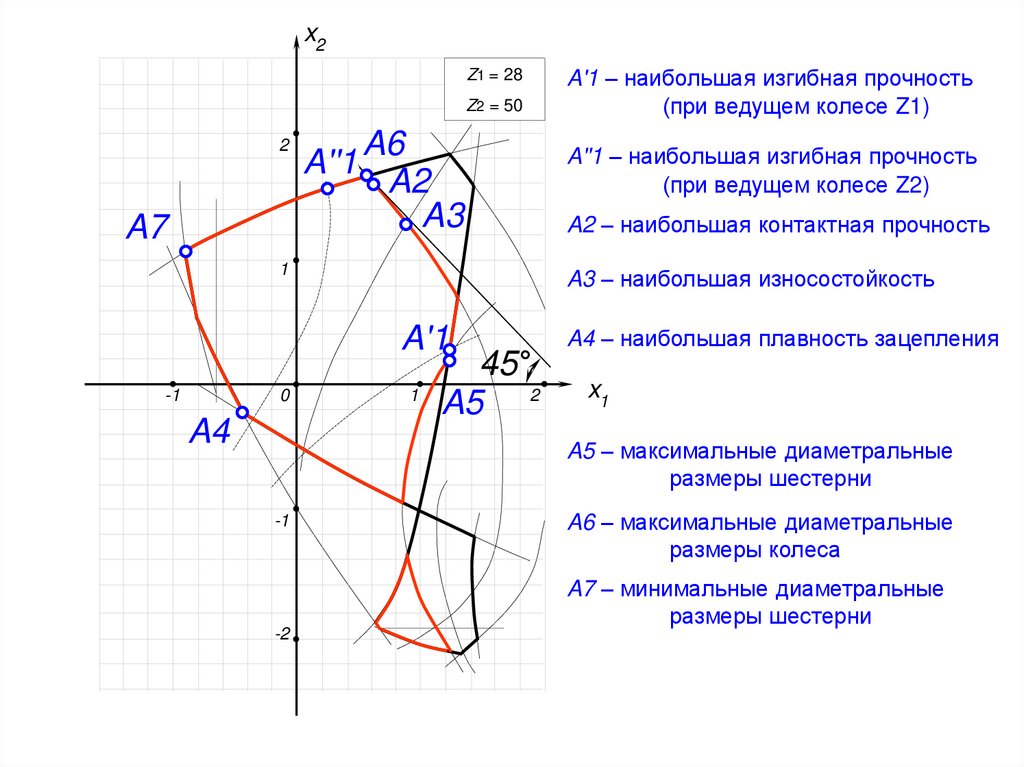
33.
x2Z1 = 28
Z2 = 50
2
A7
A''1
A6
A2
A3
1
0
A4
A''1 – наибольшая изгибная прочность
(при ведущем колесе Z2)
A2 – наибольшая контактная прочность
A3 – наибольшая износостойкость
A'1
-1
A'1 – наибольшая изгибная прочность
(при ведущем колесе Z1)
45°
1
A5 2
A4 – наибольшая плавность зацепления
x1
A5 – максимальные диаметральные
размеры шестерни
-1
-2
A6 – максимальные диаметральные
размеры колеса
A7 – минимальные диаметральные
размеры шестерни
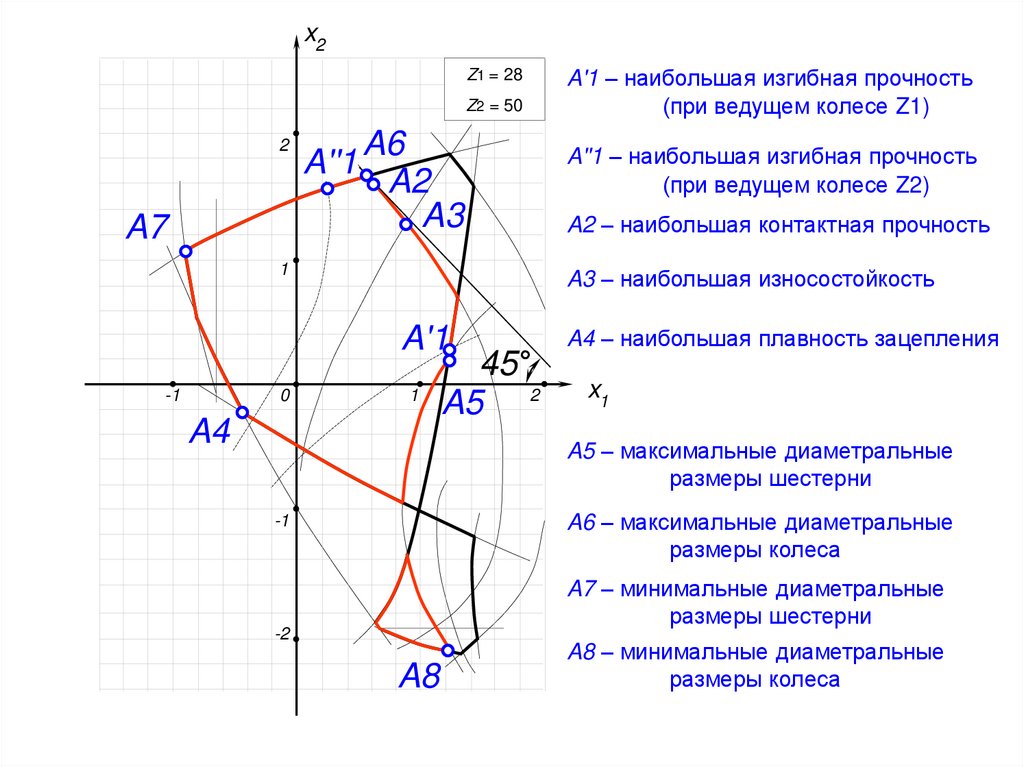
34.
x2Z1 = 28
Z2 = 50
2
A7
A''1
A6
A2
A3
1
0
A4
A''1 – наибольшая изгибная прочность
(при ведущем колесе Z2)
A2 – наибольшая контактная прочность
A3 – наибольшая износостойкость
A'1
-1
A'1 – наибольшая изгибная прочность
(при ведущем колесе Z1)
45°
1
A5 2
A4 – наибольшая плавность зацепления
x1
A5 – максимальные диаметральные
размеры шестерни
A6 – максимальные диаметральные
размеры колеса
-1
A7 – минимальные диаметральные
размеры шестерни
-2
A8
A8 – минимальные диаметральные
размеры колеса