 electronics
electronicsSimilar presentations:









")
Сопротивления элементов электроэнергетических систем и их роль в формировании переходных процессов (лекция № 3)
1.
Тяговые и трансформаторныеподстанции
Переходные процессы в электроэнергетических системах
Лекция № 3
Сопротивления элементов электроэнергетических
систем и их роль в формировании переходных
процессов
2.
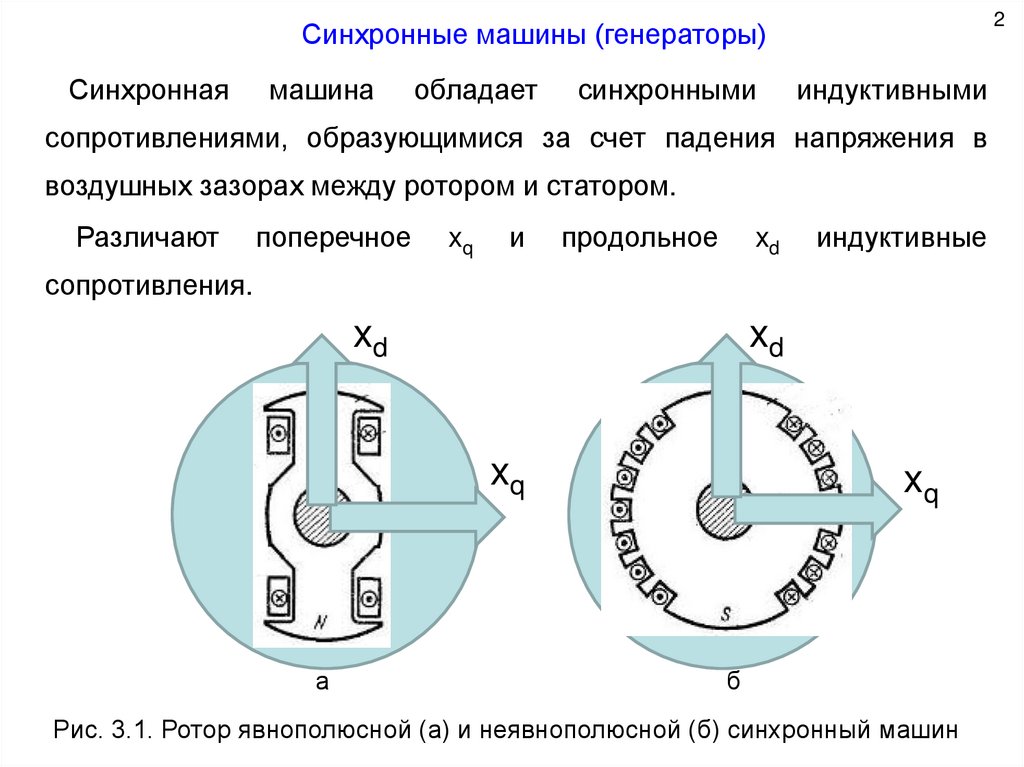
2Синхронные машины (генераторы)
Синхронная
машина
обладает
синхронными
индуктивными
сопротивлениями, образующимися за счет падения напряжения в
воздушных зазорах между ротором и статором.
Различают
поперечное
xq
и
продольное
xd
индуктивные
сопротивления.
xd
xd
xq
а
xq
б
Рис. 3.1. Ротор явнополюсной (а) и неявнополюсной (б) синхронный машин
3.
3Синхронные машины (генераторы)
В общем случае для синхронных генераторов различают:
- синхронные сопротивления машины в установившемся режиме по
продольной xd и поперечной xq осям;
- сопротивления
машины
в
переходном
режиме
(переходное
сопротивление) по продольной xd/ и поперечной xq/ осям;
- сопротивления
машины
при
наличии
демпферных
обмоток
(сверхпереходные сопротивления) по продольной xd// и поперечной
xq// осям.
У неявнополюсных машин эти сопротивления равны, т. е. xq = xd.
Для явнополюсных машин справедливо выражение xq < xd.
4.
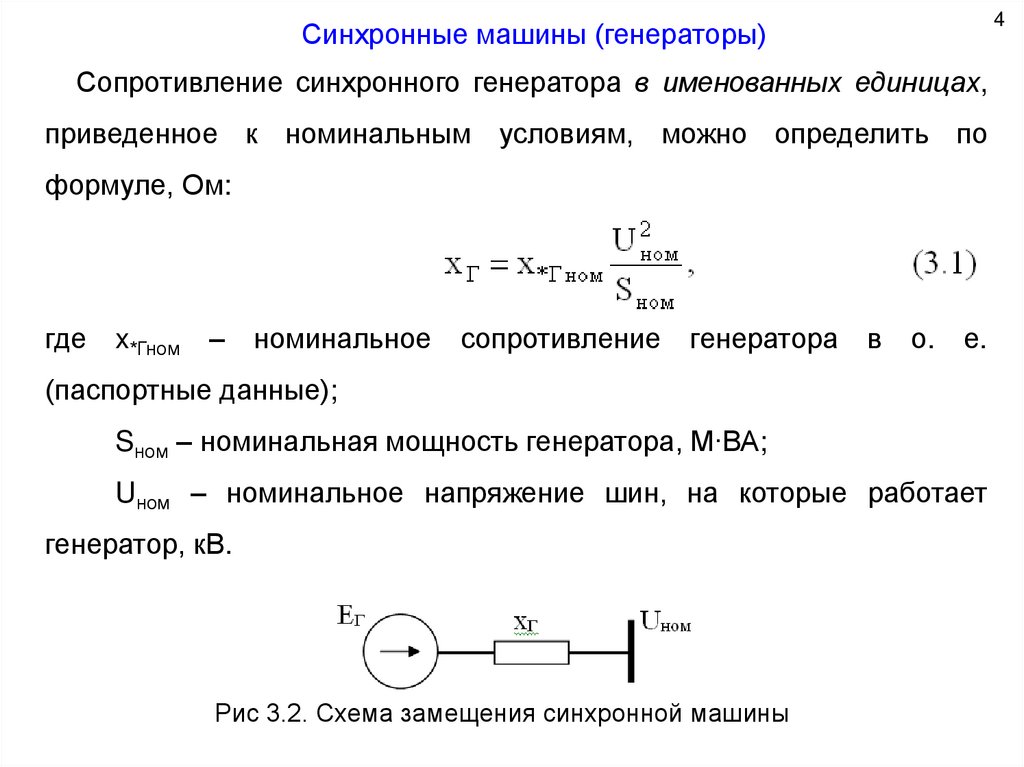
4Синхронные машины (генераторы)
Сопротивление синхронного генератора в именованных единицах,
приведенное к номинальным условиям, можно определить по
формуле, Ом:
где
x*Гном
–
номинальное
сопротивление
генератора
в
о.
е.
(паспортные данные);
Sном – номинальная мощность генератора, М∙ВА;
Uном – номинальное напряжение шин, на которые работает
генератор, кВ.
Рис 3.2. Схема замещения синхронной машины
5.
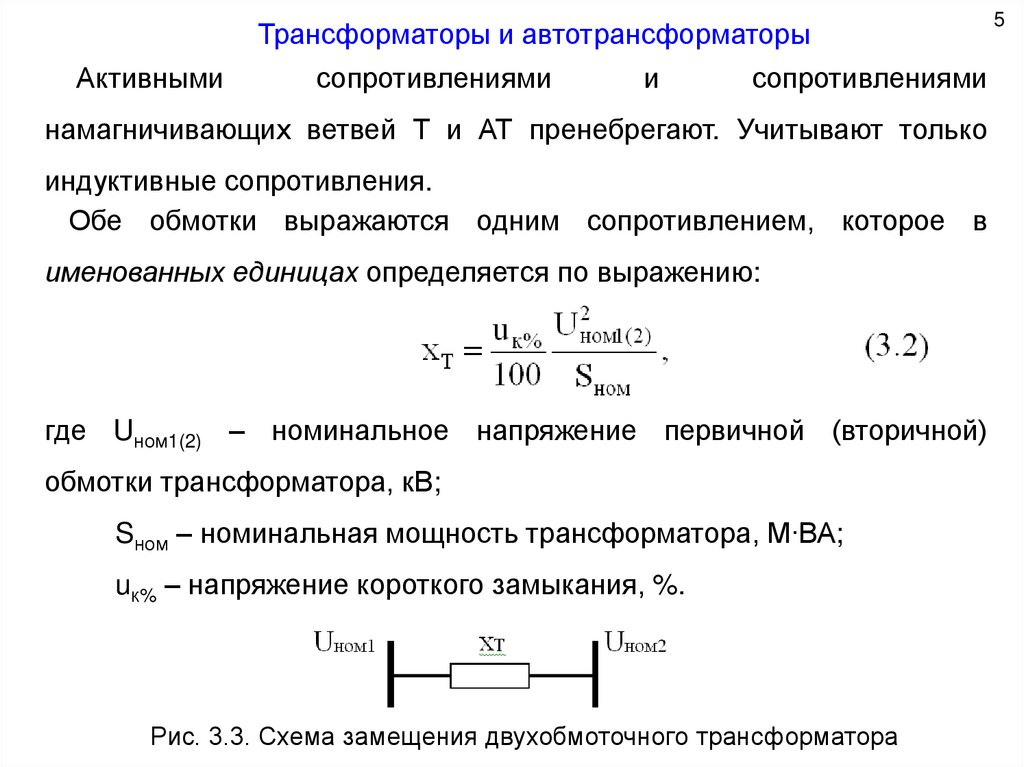
Трансформаторы и автотрансформаторыАктивными
сопротивлениями
и
сопротивлениями
намагничивающих ветвей Т и АТ пренебрегают. Учитывают только
индуктивные сопротивления.
Обе обмотки выражаются одним сопротивлением, которое в
именованных единицах определяется по выражению:
где Uном1(2) – номинальное напряжение первичной (вторичной)
обмотки трансформатора, кВ;
Sном – номинальная мощность трансформатора, М∙ВА;
uк% – напряжение короткого замыкания, %.
Рис. 3.3. Схема замещения двухобмоточного трансформатора
5
6.
Трансформаторы и автотрансформаторыКакое из номинальных напряжений будет подставлено в (3.2), к
той ступени и будет приведено сопротивление трансформатора.
6
7.
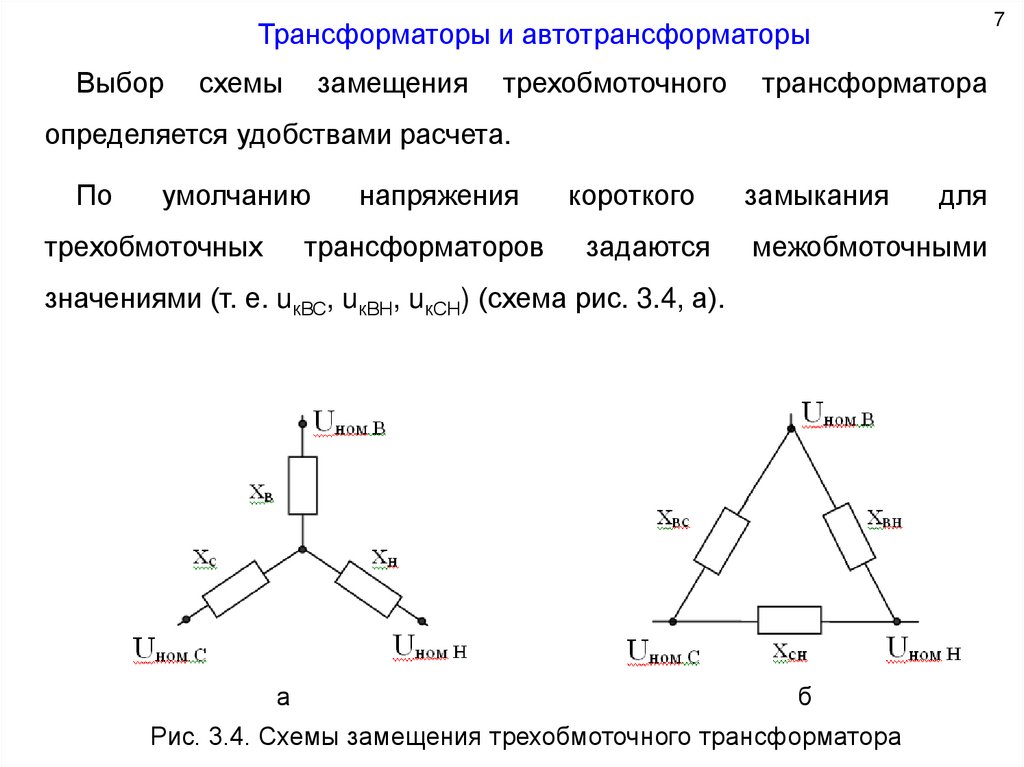
7Трансформаторы и автотрансформаторы
Выбор
схемы
замещения
трехобмоточного
трансформатора
определяется удобствами расчета.
По
умолчанию
трехобмоточных
напряжения
короткого
замыкания
трансформаторов
задаются
межобмоточными
значениями (т. е. uкВС, uкВН, uкСН) (схема рис. 3.4, а).
а
б
Рис. 3.4. Схемы замещения трехобмоточного трансформатора
для
8.
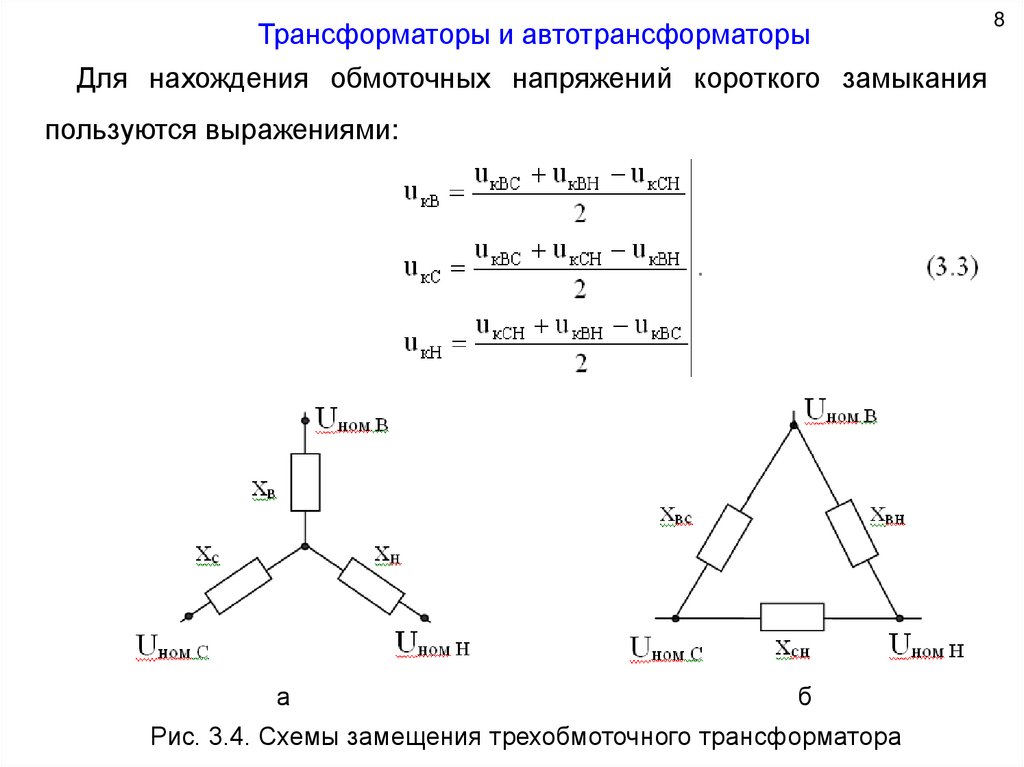
Трансформаторы и автотрансформаторыДля нахождения обмоточных напряжений короткого замыкания
пользуются выражениями:
а
б
Рис. 3.4. Схемы замещения трехобмоточного трансформатора
8
9.
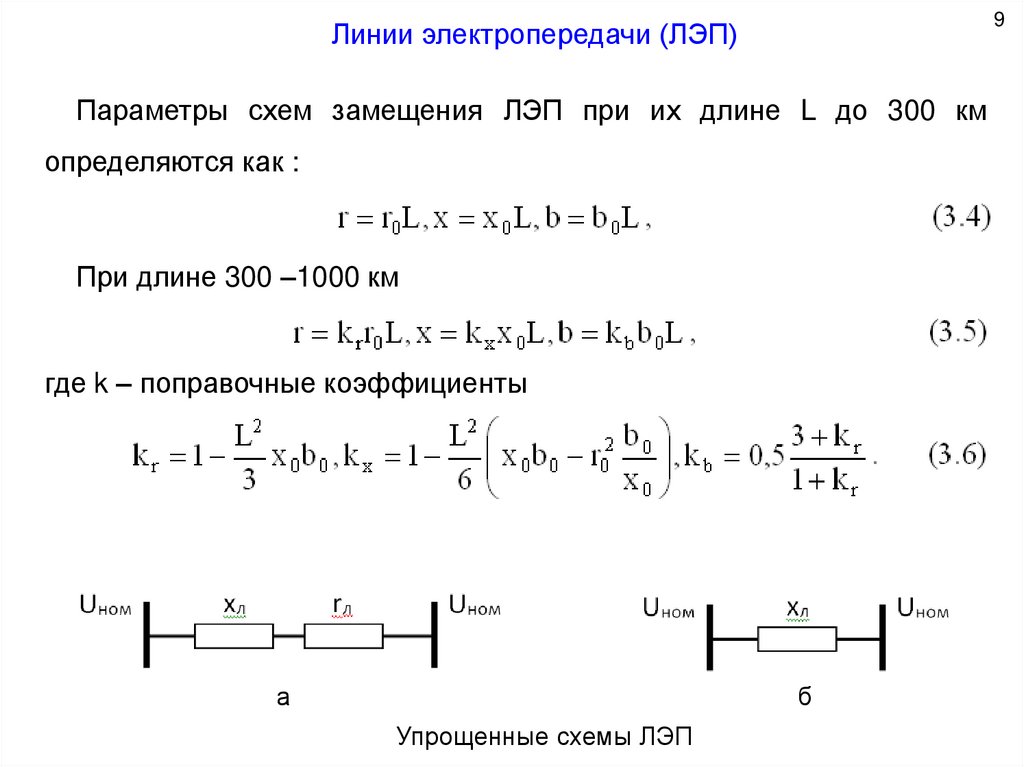
9Линии электропередачи (ЛЭП)
Параметры схем замещения ЛЭП при их длине L до 300 км
определяются как :
При длине 300 –1000 км
где k – поправочные коэффициенты
а
б
Упрощенные схемы ЛЭП
10.
Электрическая нагрузка10
Как правило рассматривают узлы нагрузки – группы приемников,
присоединенные к подстанциям.
Большую часть потребителей составляют асинхронные двигатели
(50 %), освещение (25%), печи (10%), синхронные двигатели (8%),
потери в сети (7%).
11.
Электрическая нагрузкаСпособы представления нагрузки.
1. Постоянными сопротивлениями и проводимостями в упрощенных
расчетах статической и динамической устойчивости
2. Постоянным сопротивлением xн = 1,2 о.е. при расчете
установившихся режимов КЗ. Сопротивление нагрузки приведено к
номинальным мощности и напряжению.
3. ЭДС нагрузки E/ = 0,85 о.е. за сопротивлением xн = 0,35 о.е. при
расчете начальных значений токов КЗ при наличии множества
двигателей в составе нагрузки.
11
12.
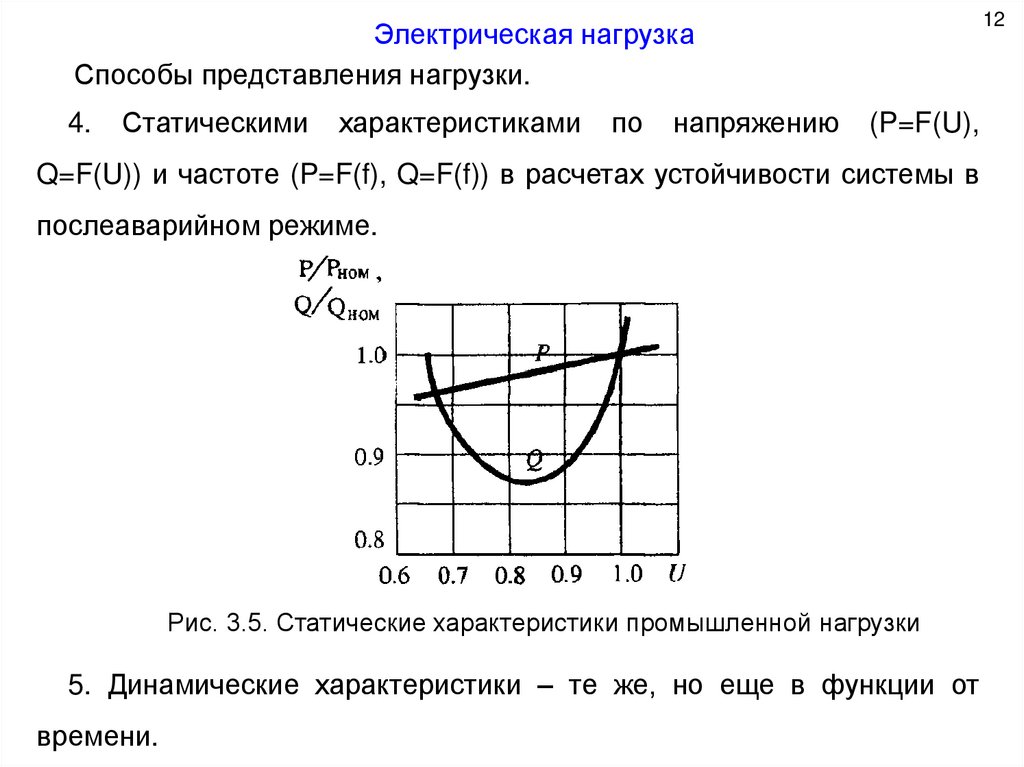
12Электрическая нагрузка
Способы представления нагрузки.
4.
Статическими
характеристиками
по
напряжению
(P=F(U),
Q=F(U)) и частоте (P=F(f), Q=F(f)) в расчетах устойчивости системы в
послеаварийном режиме.
Рис. 3.5. Статические характеристики промышленной нагрузки
5. Динамические характеристики – те же, но еще в функции от
времени.
13.
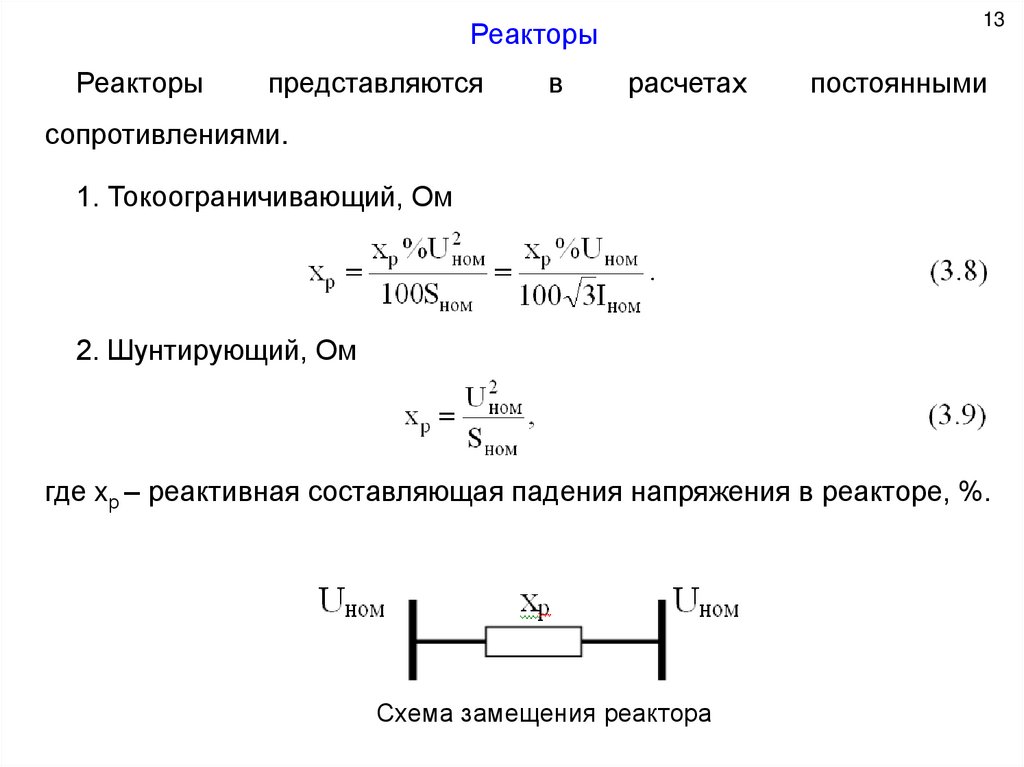
13Реакторы
Реакторы
представляются
в
расчетах
постоянными
сопротивлениями.
1. Токоограничивающий, Ом
2. Шунтирующий, Ом
где xр – реактивная составляющая падения напряжения в реакторе, %.
Схема замещения реактора
14.
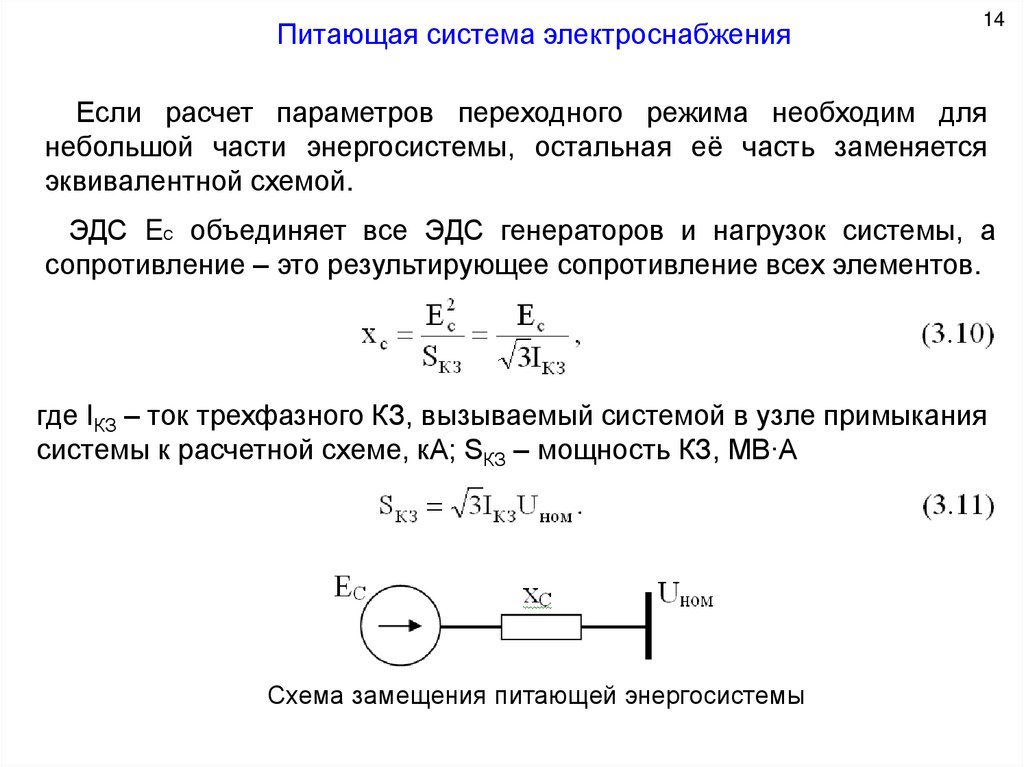
Питающая система электроснабжения14
Если расчет параметров переходного режима необходим для
небольшой части энергосистемы, остальная её часть заменяется
эквивалентной схемой.
ЭДС EС объединяет все ЭДС генераторов и нагрузок системы, а
сопротивление – это результирующее сопротивление всех элементов.
где IКЗ – ток трехфазного КЗ, вызываемый системой в узле примыкания
системы к расчетной схеме, кА; SКЗ – мощность КЗ, МВ∙А
Схема замещения питающей энергосистемы