


























































































































































































 mathematics
mathematics physics
physicsSimilar presentations:
")
")
")
")






Технологические процессы. Объект идентификации (лекция 1, 2)
1.
ВведениеКонспект лекций разработан по дисциплине
«Моделирование систем автоматического управления
технологическими процессами» для направления 01.03.02
Прикладная математика и информатика в соответствии с
требованиями ФГОС ВО и включает теоретический материал
и примеры решения задач.
В результате усвоения материала учебно-методического
пособия и выполнения предлагаемых к рассмотрению
примеров у обучающихся формируются следующие
способности:
1
2.
Введениеосуществлять ранжирование входных и выходных сигналов
динамического объекта с целью выбора наиболее
существенных, используемых в модели;
проводить классификацию динамических объектов,
подлежащих включению в систему автоматического
управления;
разрабатывать, планировать ход эксперимента;
организовывать и контролировать аналитические работы в
ИТ-проекте по созданию системы управления
технологическим процессом.
2
3.
Лекция 1Технологические процессы
3
4.
Примеры технологических процессовТехнологический процесс (ТП) —
это упорядоченная последовательность
взаимосвязанных действий,
выполняющихся с момента
возникновения исходных данных до
получения требуемого результата.
4
5.
Будем далее рассматриватьтехнологический процесс, как систему
параллельно-последовательных
соединений технологических объектов.
5
6.
Технологические объекты (ТО) –это установки, устройства и
оборудование, предназначенные для
преобразования материальноэнергетических потоков в некий продукт,
пригодный для потребления
Иначе говоря, это то, на что
направлена преобразовательная
деятельность человека.
6
7. Описания технологических объектов
78.
Лекция 2Объект идентификации
8
9.
Объект идентификацииОбъект идентификации удобно представлять в
виде многополюсника, где
x1 , x2 , ..., xn – наблюдаемые входы объекта,
y1 , y2 , ..., ym – наблюдаемые выходы,
1, 2 , ..., k – ненаблюдаемые входы.
Рис.1. Представление объекта идентификации в виде
многополюсника
10.
Объект идентификацииМногомерный объект удобно представлять в
векторной форме. Здесь векторы
X x1 , x2 , ..., xn , Y y1 , y2 , ..., ym
и 1 , 2 , ..., k
являются
векторным
входом,
векторным
выходом
и
вектором
возмущений
соответственно.
Рис. 2. Представление многополюсника в векторном виде
11.
Все входы объекта представляют собойвоздействия внешней среды на ОИ и
являются какими-то определенными
функциями состояния среды и времени.
Так как модель среды, воздействующей на
ОИ, отсутствует то входы объекта
естественно рассматривать как случайные
функции времени (случайные процессы)
X = X(t) и E = E(t), статистические свойства
которых в общем случае неизвестны.
11
12.
Однако известны наблюдения входа и выходаОИ, то есть реализации случайных функций
X(t) и Y(t) в непрерывной или дискретной
форме.
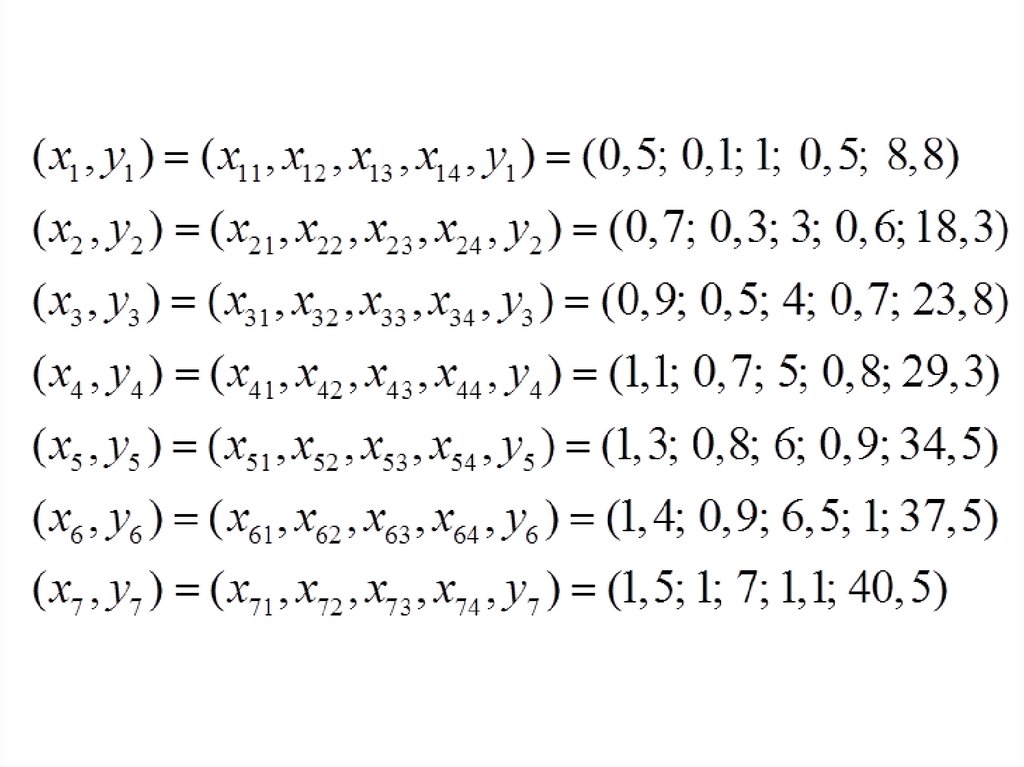
Относительно ненаблюдаемого входа E(t)
предполагается известной его структура, то
есть вид случайной функции.
Ограничимся случаем, когда E(t) –
нормальный случайный процесс.
12
13.
Объект связывает входы X и E некоторым,априори неизвестным оператором F0:
Y = F0(X, E).
Однако идентифицируется на он, а оператор
модели F, связывающий наблюдаемые входы
и наблюдаемые выходы:
Y = F(X).
Ненаблюдаемый фактор E(t) рассматривается
как случайная помеха, затрудняющая
определение оператора F.
13
14.
Сведения об объектеВсе сведения об объекте, которые необходимо иметь
для того, чтобы начать процедуру идентификации,
подразделяются на два вида: априорные
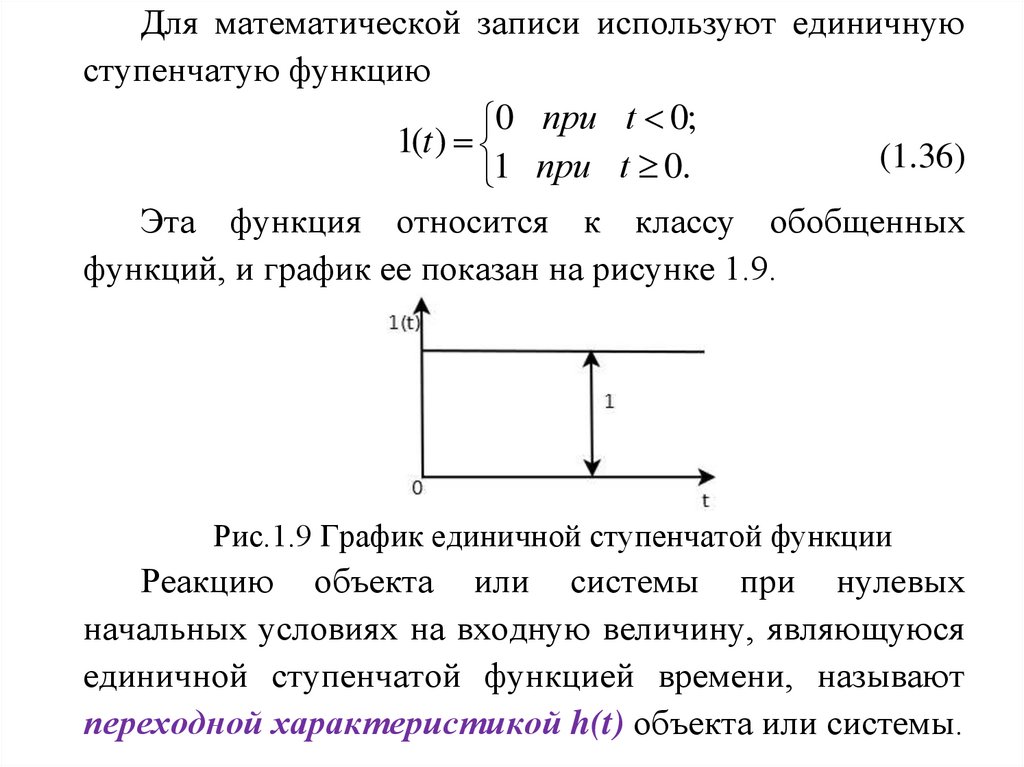
и
апостериорные.
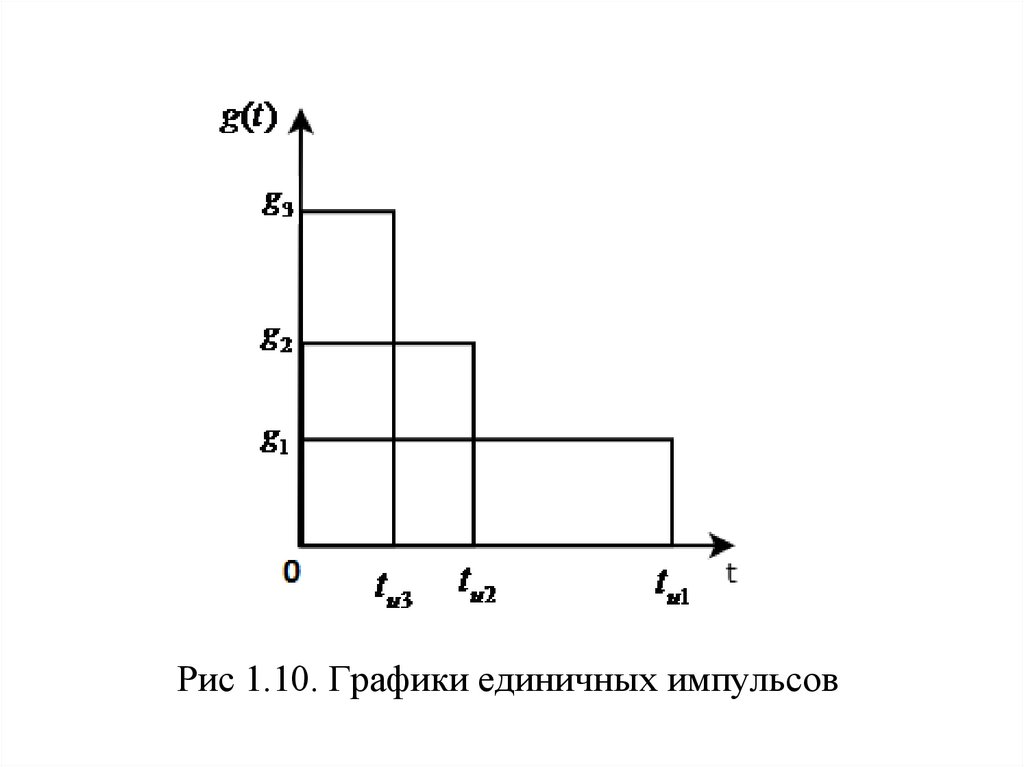
Априорная информация
Априорная информация, которой необходимо
располагать еще до наблюдения входов и выходов
объекта, должна ответить на вопрос: что
представляет собой структура ОИ? Отметим четыре
признака, которыми, впрочем, структура объекта
14
далеко не исчерпывается.
15.
Признак динамичностиОИ называется динамическим, если поведение его
и выхода зависит не только от значения входа в
текущий момент времени, но и от предыдущих
значений входа. Это означает, что объект обладает
памятью или инерционностью, которая определяет
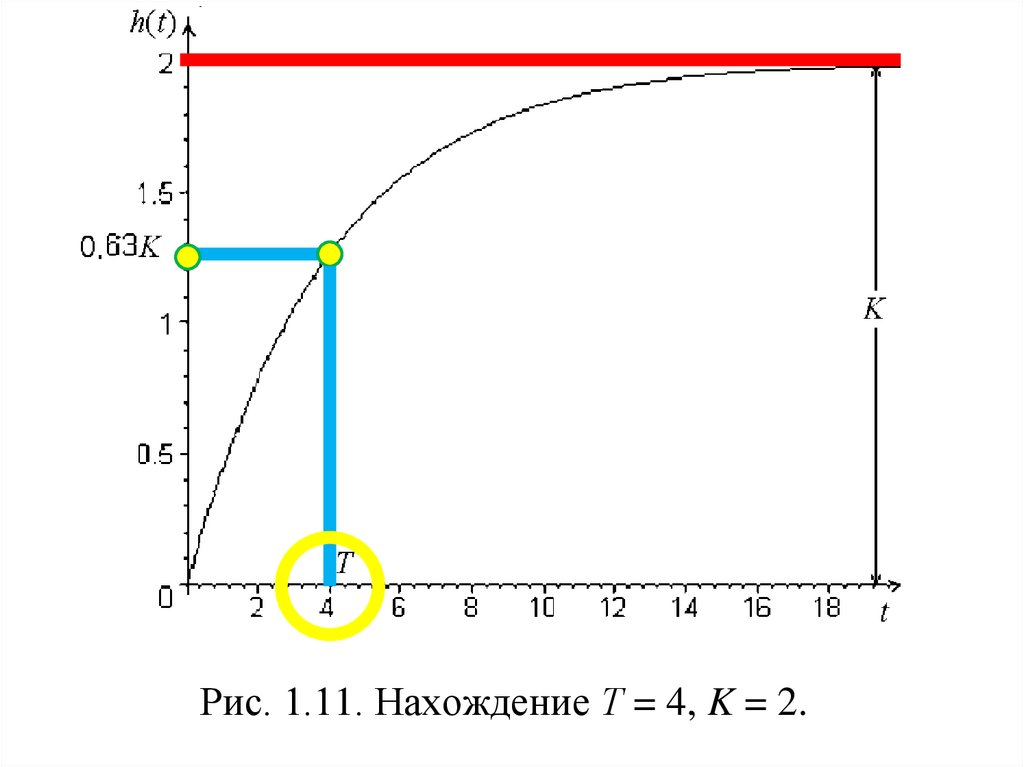
зависимость выхода от предыстории входа. Входы
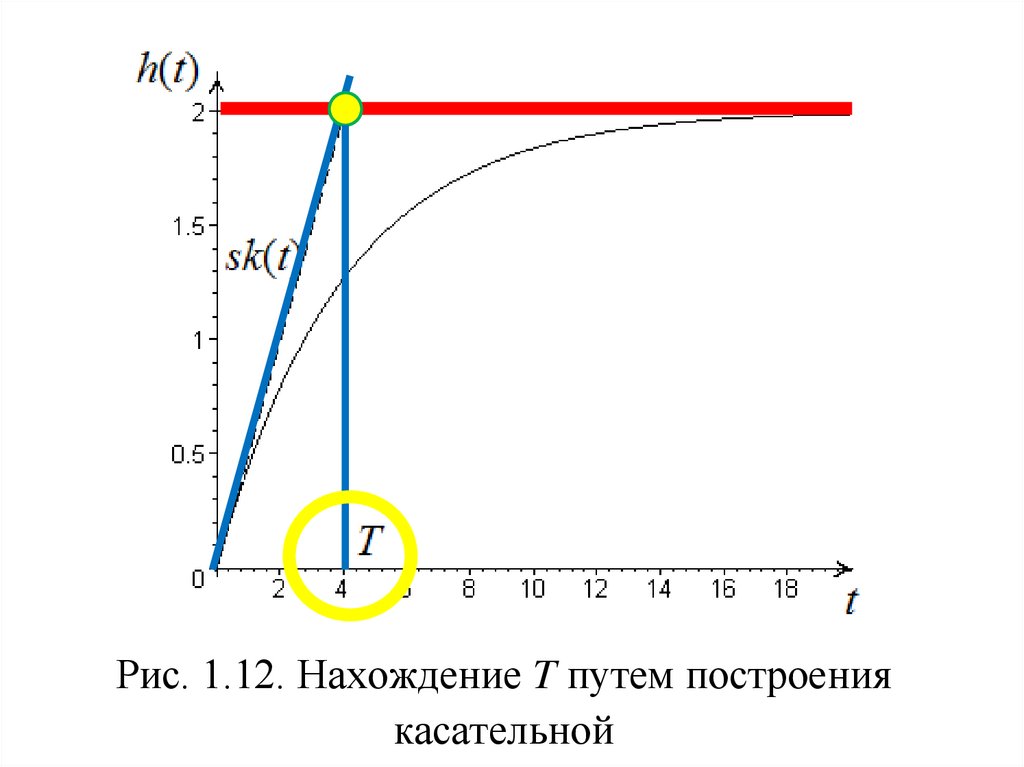
и выходы объекта являются в этом случае
функциями времени.
В противном случае ОИ будет статическим.
15
16.
Признак стохастичностиОИ называется стохастическим, если поведение его
выхода зависит от неконтролируемых входов или, что
тоже самое, сам объект содержит неконтролируемый
источник случайных факторов возмущений. В
противном случае – ОИ детерминированный.
Заметим, что, нестохастических объектов в природе не
существует, так как всякое измерение неизбежно вносит свою
погрешность в результат наблюдения. Поэтому правильно
говорить о «большой» и «малой» стохастичности,
подразумевая, что малой стохастичностью можно пренебречь
и считать такой объект детерминированным.
16
17.
Признак линейностиОИ называется линейным, если выполняется
принцип суперпозиции: линейная комбинация входов
при прохождении через оператор F0 превращается в
линейную комбинацию соответствующих выходов.
F0(αX1 + βX2) = αF0(X1) + βF0(X2)
В противном случае – ОИ нелинейный.
17
18.
Признак дискретностиОИ называется дискретным, если состояние его
входов и выходов изменяется или измеряется лишь в
дискретные моменты времени t1, t2, …, tN.
Если же входы и выходы изменяется и измеряется
непрерывно, то ОИ – непрерывный.
Естественно, что представления о виде модели объекта,
определяемые этими признаками, могут изменится после
анализа апостериорной информации.
18
19.
Апостериорная информацияЕсли априорная информация имеет качественный
характер, то апостериорная – количественный. Она
представляет собой результат измерений входа и
выхода, называемый протоколом.
Этот протокол имеет вид:
B = < X, Y >,
где X – результат всех измерений входов, Y –
результат всех измерений выходов за тот же период
наблюдений.
19
20.
Длянепрерывного
объекта
имеем
запись
непрерывных данных X = X(t) и Y = Y(t) в интервале
0 ≤ t ≤ T, то есть:
B0 = (< X(t), Y(t) >, 0 ≤ t ≤ T).
Это означает, что поведение ОИ зарегистрировано в
виде n + m различных кривых
x1(t), x2(t), …, xn(t); y1(t), y2(t), …, ym(t)
в интервале [0;T].
20
21.
Для дискретного объекта имеем запись непрерывныхданных X = (X1, X2, …, XN) и Y = (Y1, Y2, …, YN) и
протокол записывается в виде:
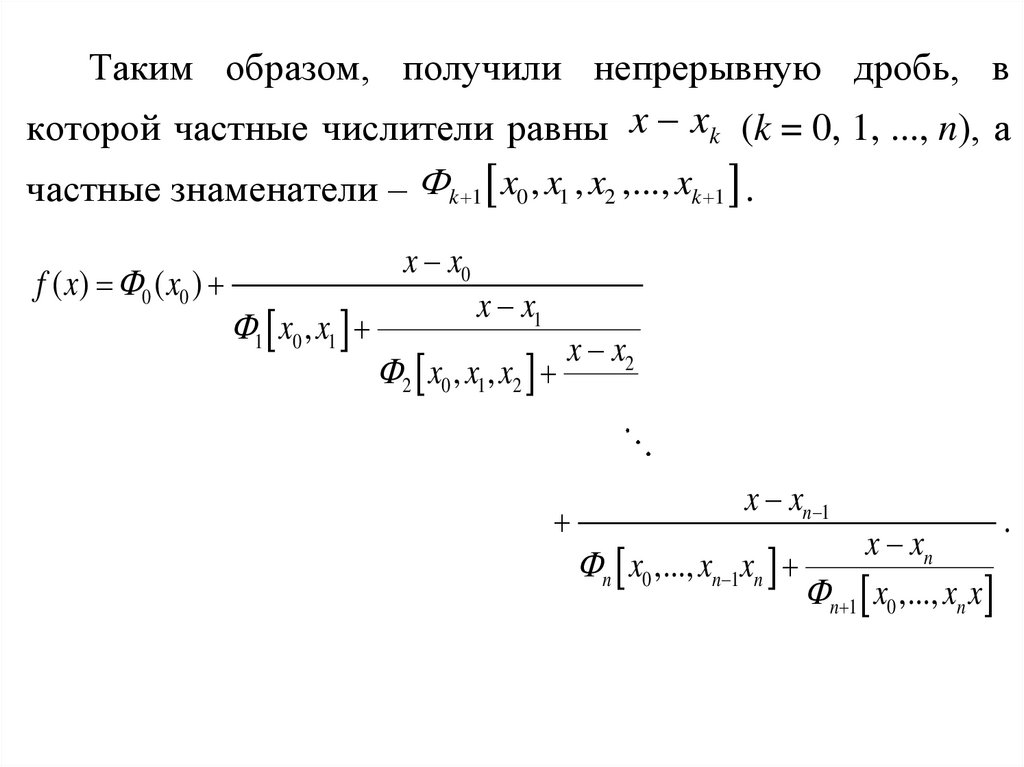
B1 = (< Xi, Yi >, i = 1, 2, …, N),
который представляет собой таблицу из n + m строк и
N столбцов.
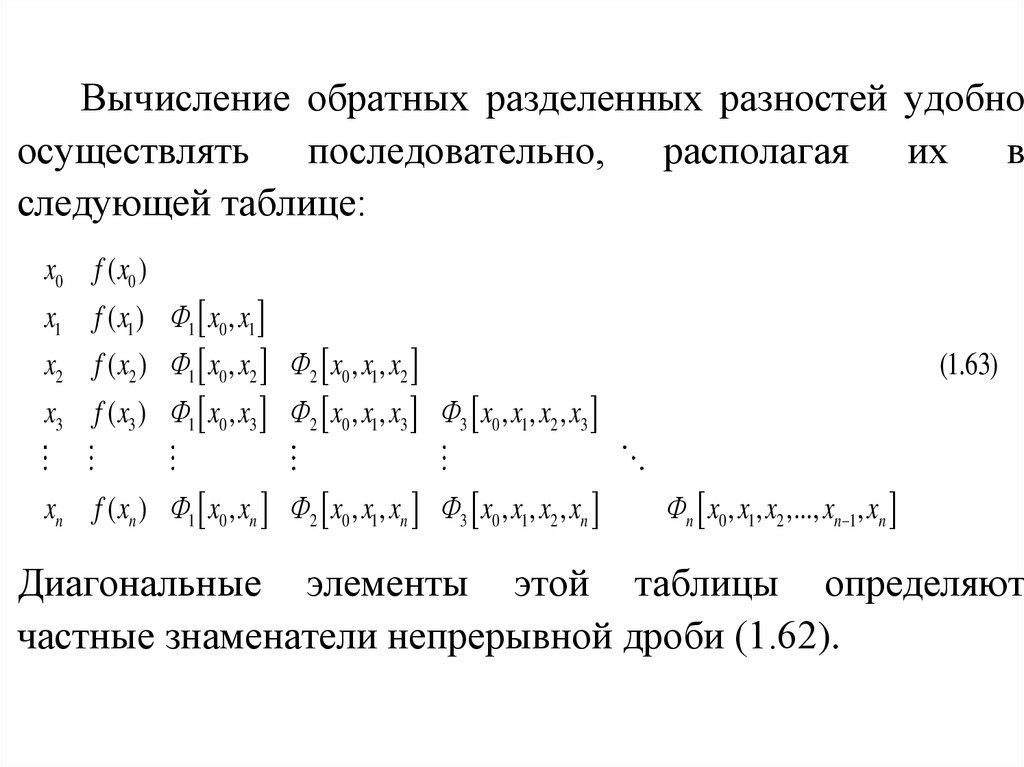
Здесь N – число измерений.
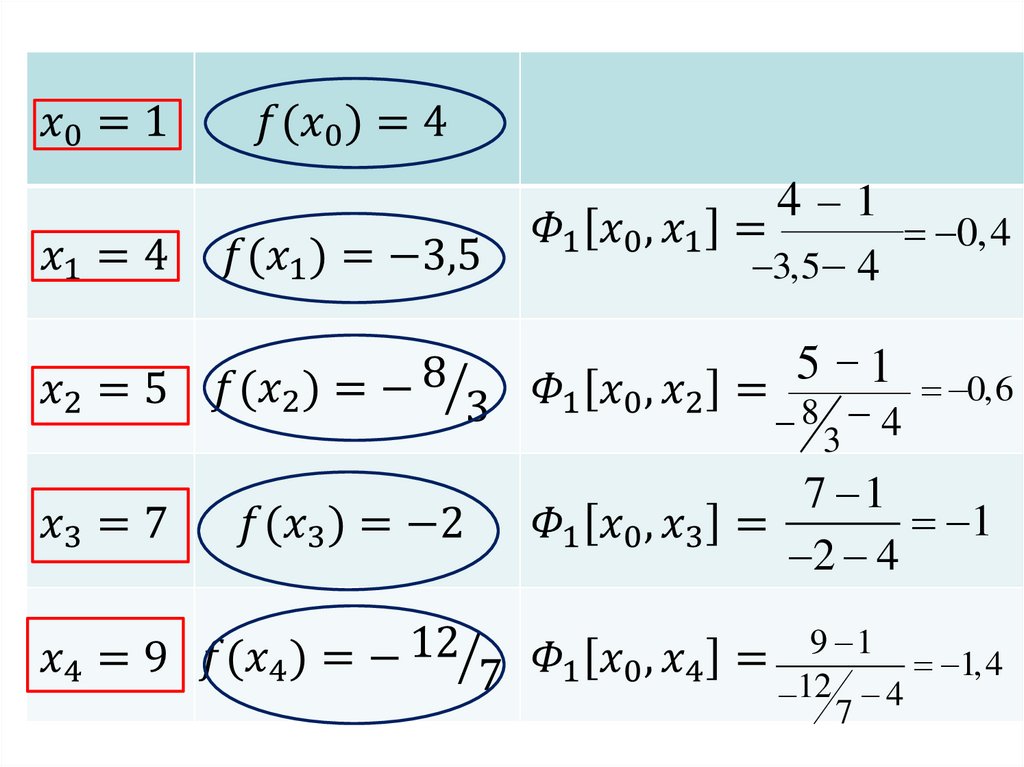
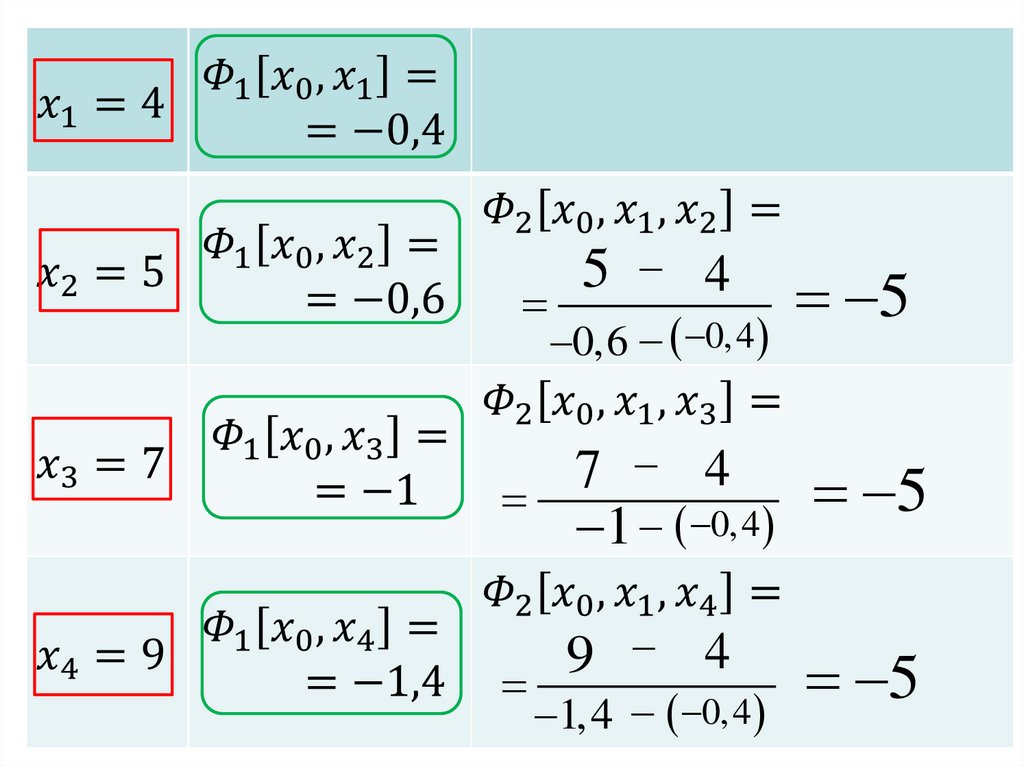
21
22.
23.
ЗдесьX i x1i , x2i , ..., xn i , Yi y1i , y2i , ..., ym i
Т
Т
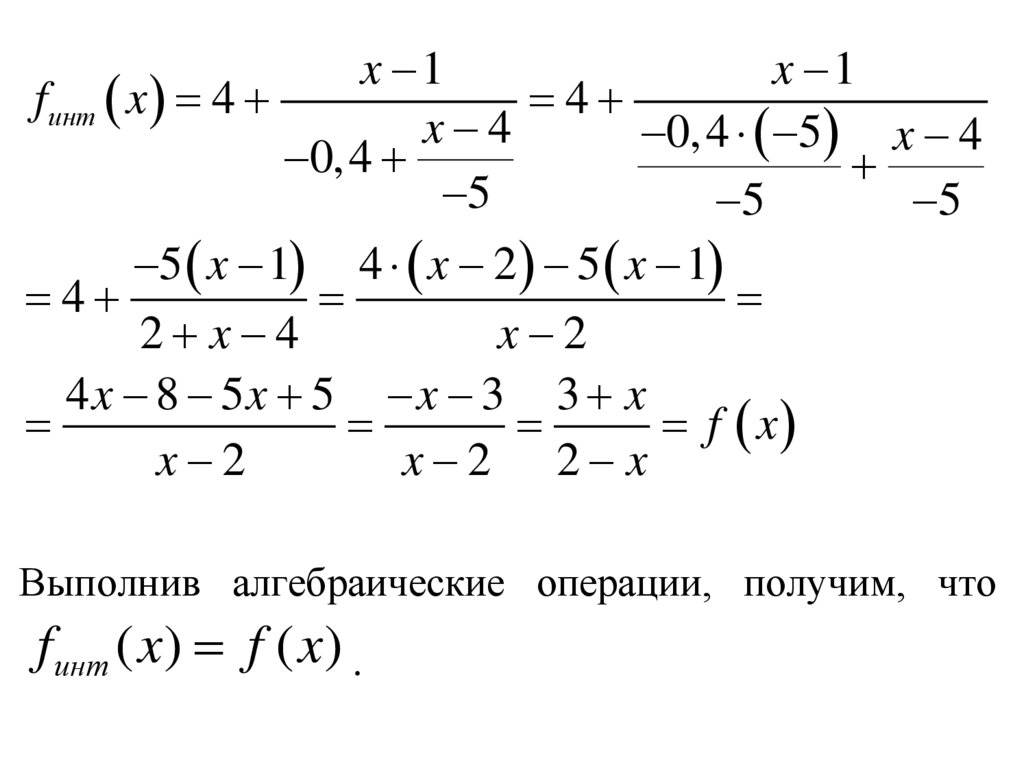
– i-ое измерение всех входов и выходов. Тогда
протокол можно переписать в виде:
X1
B1
Y1
X 2 ... X N
Y2 ... YN .
24.
Лекция 3Задача идентификации
24
25.
Постановка задачи идентификацииЗадачей идентификации является определение
оператора объекта F0, то есть построение такого
оператора модели F, который был бы близок к
оператору объекта F0 в определенном смысле:
F ≈ F0.
Заметим, что указанная близость весьма относительна.
Операторы F0 и F могут иметь разную структуру, могут быть
сформулированы на разных языках, иметь разное число
входов и выходов. Именно поэтому близость операторов F0 и
F трудно или почти невозможно оценить, тем более, что об
операторе F0 мало что известно.
25
26.
В связи с этим, естественно оцениватьблизость операторов по их реакциям на одно и
тоже входное воздействие Х, то есть по выходам
объекта Y t F0 X t , E t
M
Y
и модели t F X t .
Степень близости этих реакций в каждый
момент времени можно оценивать, например,
значением квадрата модуля разности векторов
выхода:
q t Y t Y
M
t yi t y t
2
m
i 1
M
i
2
(1.1)
M
M
M
M
Y
y
,
y
,
...,
y
1 2
где
m – вектор выхода модели.
27.
Трудности идентификацииОтметим две трудности постановки и решения задачи
идентификации.
Первая трудность заключается в определении класса
операторов , в котором ищется решение. Преодоление этой
трудности сложно осуществить формальным образом. Понятно,
что на стадии определения должна быть использована
априорная информация об объекте как предмете идентификации
для целей управления. Этот этап трудно формализуем и требует
эвристических решений.
Для принятия решения о классе необходимо учесть:
1.Структуру объекта как объекта управления;
2.Механизм работы объекта, влияющем на цели управления;
3.Цель управления;
4.Алгоритм управления.
Видим, что все это связывает класс с будущим
управлением, для которого и строится модель объекта.
28.
Вторая трудность, в решении поставленной задачи (1.13) снаименьшим ущербом для потребителя. Процесс решения всякой
задачи связан с определенными потерями: времени, средств,
оборудования, энергии. Это накладывает ограничение на выбор
алгоритма идентификации.
Этот алгоритм должен решать поставленную задачу
наилучшим образом, например, за минимальное время или с
минимальными затратами средств. То есть всегда должен быть
определен критерий эффективности процесса идентификации.
Чаще всего это потери на идентификацию, то есть ущерб,
наносимый в процессе идентификации. Эти потери зависят от
сложности задачи, необходимого объема экспериментальных
данных, способа решения задачи, то есть алгоритма минимизации
функционала Q F .
29.
Обозначим через А – алгоритм решения задачи (1.13),через I – потери на идентификацию, которые представляют
собой функционал от алгоритма А.
Алгоритм следует выбирать так, чтобы потери на
идентификацию были минимальны:
I Q F min , A min A ,
F
A
(1.15)
где I B, A – потери на идентификацию, то есть на решение
B
Q
F
задачи
min
F
с помощью алгоритма А.
Этот функционал должен быть задан.
Например, это может быть стоимость решения задачи, сложность ее
программирования, сложность применяемой при этом аппаратуры, степень ее
амортизации в процессе работы, количество человеко-часов, и так далее.
30.
Лекция 4Структурная идентификация
30
31.
Идентификация структуры и параметров объектаНазовем
структурной
идентификацией
определения структуры оператора модели F.
процесс
Если же структура оператора модели F определена или
известна заранее, то процесс идентификации сводится к
определению параметров этой структуры, то есть более
простой
задаче.
Ее
называют
параметрической
идентификацией.
Понятие «структура» не имеет четкого определения. Будем
понимать под структурой вид оператора с точностью до
коэффициентов.
Вообще говоря, структура модели может не совпадать со структурой
объекта. Так стохастические свойства объекта обычно не отражаются в
модели, то есть модель выбирается детерминированной. Они лишь
определяют выбор метода идентификации. Модель может иметь заведомо
меньше входов и выходов, чем их имеет объект. Часто это делают при малом
объеме наблюдений.
32.
Пример 1. Всякий одномерный статический непрерывныйобъект определяется функцией y F0 x . Модель такого
объекта можно представить как разложение по определенной
системе функций x 1 x , 2 x , ..., k x в виде:
k
F x ci i x
i 1
.
Здесь структура модели задается системой функций x
и их числом k, а параметры – коэффициентами разложения
с1 , с2 , ..., сk . Параметр k – структурный параметр.
Структурная идентификация заключается в отыскании
удовлетворительной системы функций и их числа, а
33.
Пример 2.Поведение одномерного непрерывного динамического
линейного объекта удобно описывать передаточной
функцией. То есть оператор модели имеет вид:
a0 a1s a2 s 2 ... am s m
F
n
2
b0 b1s b2 s ... bn s .
Здесь s – оператор дифференцирования: s d dt ;
m < n – структурные параметры;
a0 , a1 , ..., am
параметры.
и
b0 , b1 , ..., bn
неструктурные
34.
К задачам идентификации структуры объекта будемотносить следующие:
1) Выделение объекта их среды;
2) Ранжирование входов и выходов объекта по
степени их влияния на выполнение целей управления
в объекте;
3) Определение рационального числа входов и
выходов объекта, учитываемых в модели;
4) Определение характера связи между входом и
выходом модели, то есть определение вида
оператора F.
35.
Процесс выделения объекта из среды полностьюопределяется целями и алгоритмом управления. Цель по
отношению к управлению имеет внешний характер, то есть
формулируется на более высоком иерархическом уровне.
Определение множества целей связано с представлением
об объекте, то есть какая-то модель объекта, даже очень
приблизительная, должна уже существовать. Именно она
ложится в основу определения объекта управления,
процесса выделения объекта из среды.
36.
Лекция 5Ранжирование
36
37.
Ранжирование входов и выходовобъекта
Для
определения
структуры
объекта, представленного в виде
многополюсника,
необходимо
выяснить какие именно входы и
выходы объекта будут включены в
его модель. Сначала выявляем всех
возможных претендентов, а затем
выбираем наиболее существенного.
38.
Ранжирование входов и выходовобъекта
Модель создаётся
для целей
управления, значит, существенным
является тот фактор, который
наибольшим образом оказывает
влияние на реализацию целей.
Входные и выходные факторы
ранжируются.
39.
Ранжирование входов и выходовобъекта
Различают три вида факторов:
а) X – воздействия среды;
б) U – управляющие воздействия;
в) Y – выходы.
40.
Ранжирование входов и выходовобъекта
Если имеем в качестве входа вектор
X = (х1, х2, х3,… ,хm), то наиболее
существенными будут такие xi,
состояние которых легко
измеряются и которые влияют на
реализацию целей управления
наиболее существенно.
41.
Ранжирование входов и выходов объектаЕсли имеем в качестве входа вектор
управляющих воздействий
U = (u1, u2, u3,… ,uk), то наиболее
существенными будут такие ui,
которые имеют максимальную
степень влияния на достижение
цели управления и простоту
реализации изменения эти входов.
42.
Ранжирование входов и выходов объектаВыходы объекта Y = (y1, y2, y3,… ,yn)
ранжируются из соображений
количества информации, которую
несёт данный выход о близости к
реализации цели управления.
43.
Как видим, все три случаяпринципиально одинаковы.
Нужно путём опроса экспертовспециалистов присвоить
определённым параметрам
различные ранги по степени их
влияния на одни или несколько
различных критериев. Эта
процедура получила название
метод экспертных оценок.
44.
Есть несколько модификаций методаэкспертных оценок:
1. Метод непосредственного ранжирования.
2. Метод парных сравнений.
В 1 случае эксперты сразу присваивают ранги
факторам, которые представлены для
ранжирования. 2 метод использует парное
ранжирование факторов, что упрощает задачу
эксперта, но требует дальнейшей обработки
для получения ранжированного ряда.
45. Метод непосредственного ранжирования
Пусть N экспертов ранжируетn-факторов, присвоив каждому из
них целые числа от 1 до n. Так
i-му фактору j-ый эксперт
присваивает ранг k .
ij
В результате получается матрица
мнений экспертов n N .
46. Метод непосредственного ранжирования
k11 ... k1NK ... ... ...
k
...
k
nN
n1
47. Метод непосредственного ранжирования
При назначении рангов экспертам нужнособлюдать следующие условия:
1. Сумма рангов, назначенных всем
факторам должны быть одинаковы для
каждого эксперта и равны:
n n 1
i
2
i 1
n
48. Метод непосредственного ранжирования
2. Если эксперт считает какие-то qфакторов одинаковыми, то он
присваивает им одинаковый ранг. Этот
ранг равен среднему из q целых рангов,
которые получены при условии, что
эксперту удалось их проранжировать.
Такие ранги называются связанными
рангами
49. Метод непосредственного ранжирования
Для определения результирующихрангов следует вычислить средние ранги
каждого фактора, среди присвоенных
всеми экспертами.
N
1
ki kij , i 1, n
N j 1
50. Метод непосредственного ранжирования
Эти ранги и дают возможностьпроранжировать факторы. На первом
месте ставиться фактор, имеющий
минимальный средний ранг:
k z min ki
i 1, 2, ..., n
На второе – фактор, имеющий
минимальный ранг среди оставшихся
и т. д.
51. Метод непосредственного ранжирования
Очевидно, что далеко не всякийрезультат экспертного опроса следует
считать удовлетворитель-ным. Поэтому
для оценки всякого экспертного опроса
вводиться критерий, характеризующий
согласованность эксперимента. Чем
выше согласованность, тем более можно
«верить» результатам экспертного
опроса, и наоборот.
52. Метод непосредственного ранжирования
Согласованность экспертов,предлагается, определять, с помощью
коэффициента, предложенного Кэнделом
и Смитом, который характеризует
согласованность мнений экспертов о
влиянии различных факторов на
результирующий признак.
53. Метод непосредственного ранжирования
Этот коэффициент имеет вид:W
D(k)
Dmax (k)
54. Метод непосредственного ранжирования
D k – выборочная дисперсия среднихрангов, она по определению равна:
n
1
D k ki k
n i
2
55. Метод непосредственного ранжирования
k – среднее средних рангов:1
n 1
k ki
n i
2
n
56. Метод непосредственного ранжирования
Чем более согласованы эксперты, темсильнее разброс средних рангов. В
идеальном случае – мыслят, как один,
тогда средние ранги являются целыми
числами от 1 до n.
Чем менее согласованы эксперты, тем
ближе друг к другу средние ранги. Тогда
они колеблются вокруг числа (n + 1)/2.
57. Метод непосредственного ранжирования
Рис.1. Полностью согласованные экспертыРис. 2. Несогласованные эксперты
58. Метод непосредственного ранжирования
Определим максимальную дисперсиюсредних рангов:
1 n 1
n 1
Dmax (k) i
n i
2
12
n
2
2
59. Метод непосредственного ранжирования
Заметим, что 0 W 1 .При W=0 эксперты полностью не
согласованны, а при W=1 они
высказываются единогласно. Проверка
значимого отличия данного
коэффициента от нуля осуществляется с
помощью
-критерия.
2
60. Метод непосредственного ранжирования
наблюд N (n 1)W2
где критичопределяется по заданному
уровню значимости α, и числу степеней
свободы df = n - 1. Коэффициент
считается значимым, т.е.
согласованность между мнениями
экспертов существует, при заданном
ровне значимости, если
2
наблюд критич
2
2
61. Пример
Группа из 5 экспертов ранжирует 8 факторов.1 эксперт 2 эксперт 3 эксперт 4 эксперт 5 эксперт
1
7
3
7
5
2
2
6
2
7
4
1
3
8
8
7
6
3
4
2
5,5
1
3
5
5
1
1
2
1
5
6
3
5,5
3
2
5
7
4
5,5
4
7
7
8
5
5,5
5
8
8
62. Пример
Определим средние ранги для каждогофактора.
1 5
1 5
k 1 k 1 j 4,8
k2 k2j 4
5 j 1
5 j 1
1 5
k 3 k 3 j 6,4
5 j 1
1 5
k 4 k 4 j 3,3
5 j 1
1 5
k5 k5j 2
5 j 1
1 5
k 6 k 6 j 3,7
5 j 1
5
5
1
k 7 k 7 j 5,5
5 j 1
1
k 8 k 8 j 6,3
5 j 1
63. Пример
Ранжированный ряд приобретает вид:u 5 u 4 u 6 u 2 u1 u 7 u 8 u 3
Вычислим дисперсию средних рангов:
n 1
k
4,5
2
1 8
2
D(k ) (k i k ) 2,065
8 i 1
64. Пример
Определим максимальную дисперсию:n 1
Dmax
5,25
12
2
Определим критерий согласованности:
W
D(k )
Dmax ( k )
2, 065
5, 25
0, 39333
65. Пример
Наблюдаемое значение критерия:2наблюд N (n 1)W 5(8 1)0,39333 13,76655
Пусть 0,05 и df n 1 8 1 7, то
критич 14,068.
2
Так как наблюдаемое критическое
то с вероятностью ошибки 5% данные не
согласованы.
2
2
66. Метод парных сравнений
Экспертам предлагается проранжироватьфакторы попарно, т.е. каждой паре xi и x j
факторов поставить в соответствие qij :
1, xi x j
qij 0, xi x j
1,
x
x
i
j
67. Метод парных сравнений
где « » - символ предпочтения,а « » - символ эквивалентности. Своё мнение
каждый из N экспертов представляет в
таблице
Q = q , при этом
k
k
ij
q ij + q ji = 0
68. Метод парных сравнений
Для того чтобы определить усреднённуюматрицу Q qij
N
, необходимо её элементы
вычислить как среднее по матрицам всех
экспертов:
N
1
k
qij qij
N k 1
69. Метод парных сравнений
Для определения рангов ранжируемыхфакторов следует определить правило
назначения рангов по таблице Q qij .
N
Таких правил может быть много, рассмотрим
два из них.
70. Метод парных сравнений
Правило 1.Определим суммарные
предпочтения каждого
n
фактора путём
qij
суммирования в каждой строке: qi
j 1
Естественно считать,
что первый ранг имеет фактор, суммарное
предпочтение которого максимально:
qz max qi
i 1,..., n
тогда первый ранг имеет фактор x .
z
71. Метод парных сравнений
Правило 2.Основная мысль второго правила опирается на идею
усиленного контраста. Для этого вводиться порог δ.
Если предпочтение выше этого порога, то оно имеет
явный характер, а если ниже, то оно сомнительно,
т.е. соответствует эквивалентности. Получаем
следующее преобразование матрицы средних
предпочтений Q в контрастную матрицу U ,
которую легко преобразовать в ранжированный ряд:
72. Метод парных сравнений
Правило 2.uij (qij ),
(i j 1,..n), где
-1,если q
(q) 0,если q
1,если q
73. Метод парных сравнений
Как видно это преобразование целиком и полностьюопределяется порогом δ. При δ = 1 контрастная
матрица становиться нулевой и все факторы
эквивалентны.
При δ = 0 она полностью заполняется единицами,
что приводит к противоречию. Поэтому при выборе
δ следует помнить, что его увеличение приводит к
отказу от ранжирования, а уменьшение – к
увеличению числа явных предпочтений и опасности
появления противоречий.
Поэтому величину δ рекомендуется выбирать «на
пороге противоречий»
74. Метод парных сравнений
Пример:Пусть матрица осреднённых предпочтений имеет
вид:
x1
x2
x3
x4
0
-0,7
-0,44
-0,52
0,7
0
-0,74
0,5
0,44
0,74
0
-0,78
x 4 0,52
-0,5
0,78
0
x1
x2
x3
75. Метод парных сравнений
При δ = 0,7 контрастная матрица предпочтенийимеет вид:
x
x
x
x
x1
x2
x3
x4
1
0
1
0
0
2
3
4
-1
0
1
0
0
-1
0
1
0
0
-1
0
Ряд предпочтений представляет из себя следующее:
x4
x3
x2
x1
76. Метод парных сравнений
При δ = 0,5 контрастная матрица предпочтенийимеет вид:
x
x
x
x
x1
x2
x3
x4
1
0
1
0
1
2
3
4
-1
0
1
-1
0
-1
0
1
-1
1
-1
0
При этом она содержит противоречие:
x 4 x3 x 2 x 4
77. Метод парных сравнений
Поэтому минимальный порог, который не приводитx1 x 2 x 3 x 4
к противоречию δ = 0,52.
x1 0 -1 0 -1
Контрастная матрица
x 2 1 0 -1 1
при этом пороге
x 3 0 1 0 -1
имеет вид:
x 4 1 -1 1 0
Применив правило 1 для этого примера, получим
ранжированный ряд: x4 x2 x3 x4
Для более точного решения необходимо получить
новые данные о факторах x2 и x3 .
78. Метод парных сравнений
Замечание:При использовании матрицы, предоставленной
экспертом, требуется проверить его оценки на
выполнение свойства транзитивности.
Если фактор а предпочтительней фактора b, и фактор
b предпочтительней фактора с, то фактор а
предпочтительней с.
Если условие транзитивности экспертом нарушено,
то результаты ранжирования должны быть
отправлены ему на доработку.
79. Метод парных сравнений
Причины нарушения условия транзитивностиэкспертом заключаются в нарушении основания для
ранжирования от пары факторов к паре. Так,
например, ранжируя одну пару управляющих
воздействий эксперт считает основанием простоту
изменения уровня признака, а при ранжировании
другой пары – существенность влияния на цели
управления в объекте.
Чтобы не было нарушения транзитивности,
необходимо точнее формулировать основания
ранжирования.
80. Метод парных сравнений
Пример 2.Пусть три эксперта ранжируют 4 фактора u,
v, w, r, используя метод парных сравнений.
Они
предоставляют
матрицы,
которые,
прежде всего, надо проверить на выполнение
условия транзитивности.
81. Метод парных сравнений
Матрица первого эксперта имеет вид:Q1 u
v
w
r
1
-1 1
u 0
-1 1
v -1 0
1
0
1
w 1
r -1 -1 -1 0
Из 1 строки видим, что u v, u r и u w,
то есть w u.
Из 2 строки видим, что v r и v w, то есть w v.
Из 3 строки – w r. Окончательно получаем, что
w u v r. Условие транзитивности не нарушено.
82.
Второй эксперт предоставил следующуюматрицу:
Q2 u
v
w r
1
-1 1
u 0
-1 1
v -1 0
1
0
-1
w 1
0
r -1 -1 1
Из 1 строки видим, что u v, u r и u w, то есть
w u. Из 2 строки видим, что v r и v w, то есть
w v. Из 3 строки – w r, то есть r w.
Окончательно получаем, что r w u v r.
Условие транзитивности нарушено. В таком
случае, эксперту предлагают доработать свои
выводы или исключают его из экспертной
группы.
83.
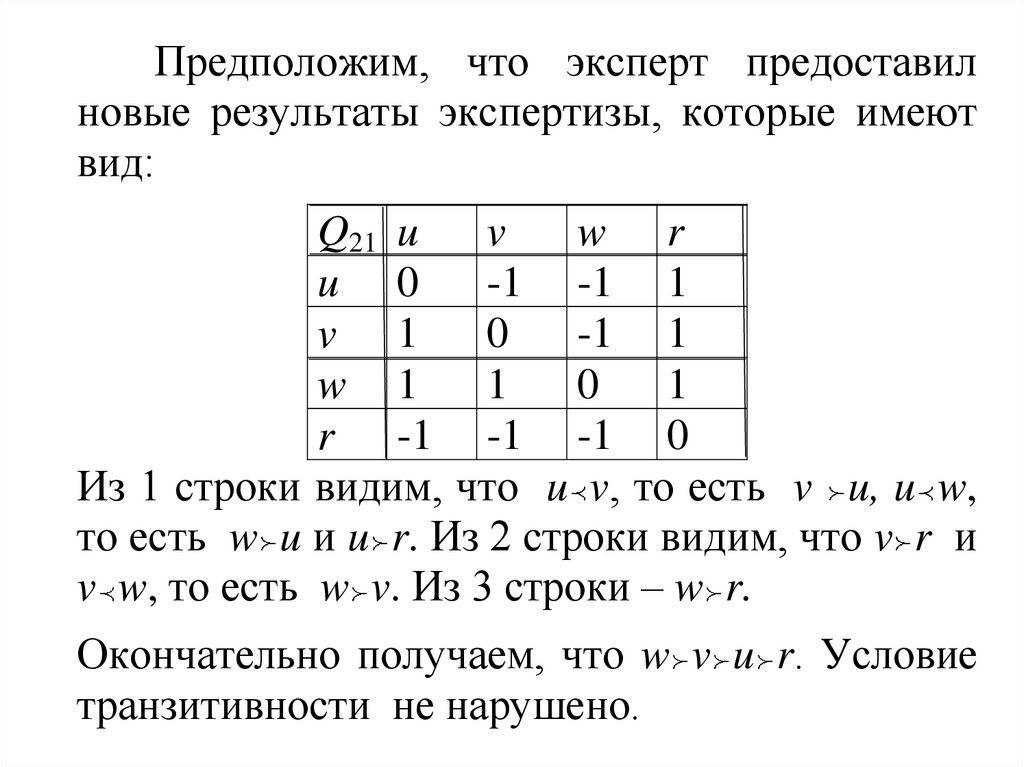
Предположим, что эксперт предоставилновые результаты экспертизы, которые имеют
вид:
Q21 u
v
w r
-1 -1 1
u 0
0
-1 1
v 1
1
0
1
w 1
r -1 -1 -1 0
Из 1 строки видим, что u v, то есть v u, u w,
то есть w u и u r. Из 2 строки видим, что v r и
v w, то есть w v. Из 3 строки – w r.
Окончательно получаем, что w v u r. Условие
транзитивности не нарушено.
84.
Третий эксперт предоставил следующуюматрицу:
Q3 u
v
w r
1
1
1
u 0
-1 1
v -1 0
0
1
w -1 1
r -1 -1 -1 0
Из 1 строки видим, что u v, u w, и u r.
Из 2 строки видим, что v r и v w, то есть w v.
Из 3 строки – w r.
Окончательно получаем, что u w v r. Условие
транзитивности не нарушено.
85.
Усредним матрицы Q1, Q21 и Q3. Получимосредненную матрицу предпочтений.
u
v
w
r
u
v
0
1/3
-1/3 0
-1/3 1
-1 -1
w r
-1/3 1
-1 1
0
1
-1 0
1
-0,33
2,67
-3
Чтобы
построить
ранжированный
ряд,
просуммируем элементы каждой строки
матрицы. Откуда осредненное мнение группы
из 3 экспертов приводит к ранжированию вида:
w u v r.
86.
Лекция 6Определение рационального
числа входов и выходов
86
87.
Определение рационального числавходов и выходов модели
После ранжрования входов и выходов объекта и
управляющих
воздействий
требуется
определить
количество факторов каждого вида, учитываемых в
модели. Это тоже делается с помощью экспертов.
Пусть
число
измеряемых
входов
равно
n,
измеряемых выходов – m и управляющих воздействий – k.
Тогда общий вид модели объекта с точки зрения
количества входов и выходов таков:
F n, m, k .
88.
Наша цель определить числа n , m , k , которыебудут наилучшими для построения модели с точки
зрения экспертов.
Сначала фиксируется простейшая модель,
содержащая минимальное количество входов и
выходов, например:
n1 0, m1 1, k1 1.
То есть эта модель содержит одно управляющее
воздействие и один выход:
F1 F n1 , m1 , k1 .
89.
Затем экспертам предлагается выбрать вторуюмодель из системы:
F n1 1, m1 , k1
F2 F n2 , m2 , k2 F n1 , m1 1, k1 .
F n1 , m1 , k1 1
90.
Каждая следующая модель образуется ихпредыдущей по тому же принципу:
F ni 1, mi , ki
Fi 1 F ni 1 , mi 1 , ki 1 F ni , mi 1, ki .
F
n
,
m
,
k
1
i
i
i
91.
В результате получается последовательностьмоделей, из которых вторая предпочтительней
первой, третья – предпочтительней второй и
так далее. Но эксперты могут определить, что
на некотором этапе увеличение числа входов и
выходов становится нецелесообразным, потому
что модель становится слишком сложной:
F1
F2
...
Fq 1
Fq
Fq 1
...
Fz .
92.
В таком случае, модель Fq F nq , mq , kq будетискомой моделью, и рациональные числа
входов и выходов объекта, учитываемых в
модели, равны:
n nq , m mq , k kq .
93.
Теперь надо определить, какие из входов,выходов и управляющих воздействий объекта
будут учтены в модели. Для этого используем
информацию
о
ранжированных
рядах,
полученную ранее. В модель попадут первые
n входов, m выходов и k управлений.
94.
Лекция 7 Статическиедетерминированные модели
94
95.
Рассмотрим случай при n > 1 и m = 1. Наша системавырождается в уравнение:
y c0 c1 x1 ... cn xn .
(1.22)
Здесь мы имеем (n + 1) неизвестный параметр, которые
нужно оценить на основе информации о работе объекта,
представленной в виде N-пар вход/выходных данных
xi , yi . Здесь xi – i-ое измерение всех n входов:
xi xi1 , xi 2 , ..., xin , i 1, N
(1.23)
96.
Дляметод,
идентификации
смысл
используется
которого
шаговый
заключается
в
приравнивании выходов объекта и модели на N
парах измерений (шагах).
Получаем N уравнений с (n + 1) неизвестными:
n
c0 c j xij yi
j 1
(1.24)
97.
Для удобства вводят фиктивную переменную x0 1 ,после чего выражение (1.24) можно переписать в виде:
n
c x y
j 0
Здесь
j ij
вектор
i
(1.25)
неизвестных
параметров
c c0 , c1, c2 , ..., cn , матрица измерений входов:
T
1 x11
1 x
21
X
... ...
1 xN 1
x12
x22
...
xN 2
... x1n
... x2 n
,
... ...
... xNn
вектор y y1 , y2 , ..., yN - вектор измерений выхода.
T
98.
Выражение (1.25) можно записать в матричновекторной форме:Xc y.
(1.26)
Система (1.26) имеет единственное решение, если:
rank X n 1 .
Если это условие выполняется, тогда из N пар
выбираем (n + 1) линейно независимую и решаем
систему линейных уравнений (1.26).
99.
ПримерПусть m = 1, n = 4. Тогда модель имеет вид:
y c0 c1 x1 c2 x2 c3 x3 c4 x4
Информация представлена в виде N = 7 пар:
100.
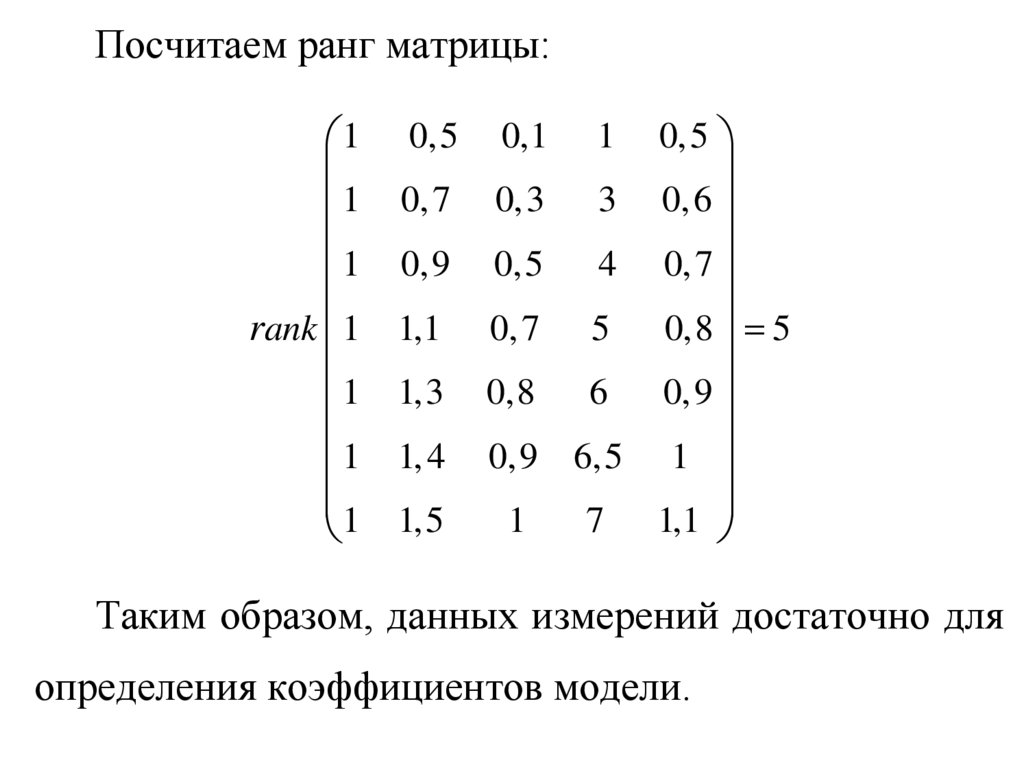
101.
Посчитаем ранг матрицы:1
1
1
rank 1
1
1
1
0,5
0,1
1
0, 7
0,3
3
0,9
0,5
1,1
0, 7
1,3
0,8
1, 4
0,9
1,5
1
0,5
0, 6
4 0, 7
5 0,8 5
6
0,9
6,5 1
7 1,1
Таким образом, данных измерений достаточно для
определения коэффициентов модели.
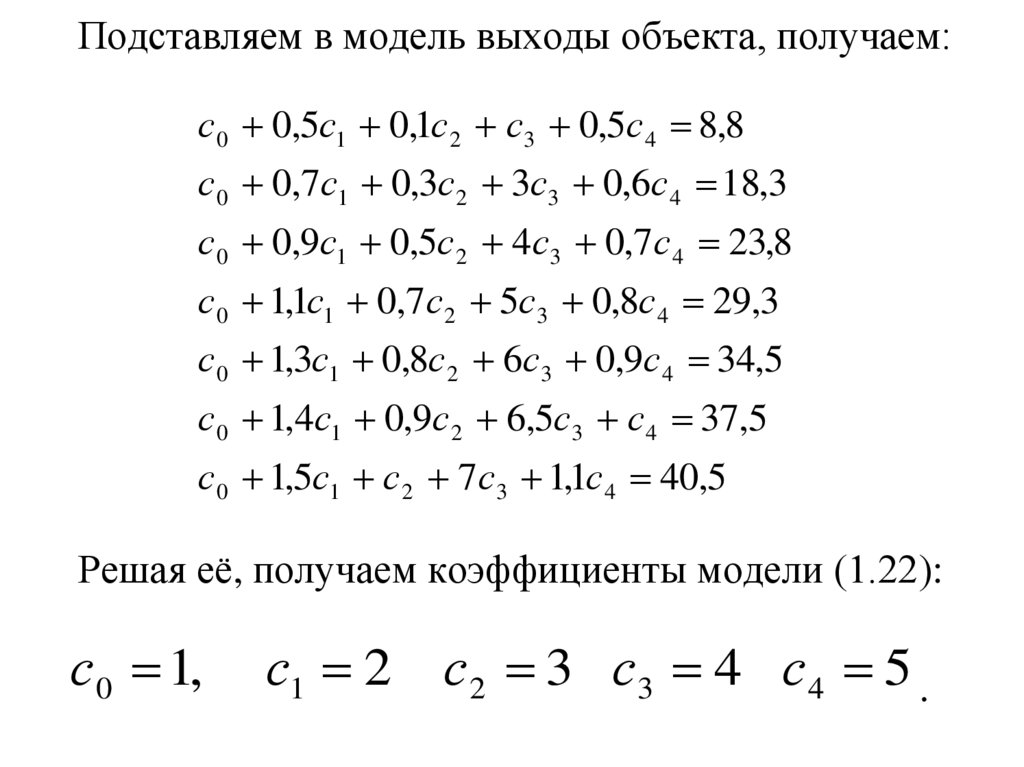
102.
Подставляем в модель выходы объекта, получаем:с 0 0,5с1 0,1с 2 с3 0,5с 4 8,8
с 0 0,7с1 0,3с 2 3с3 0,6с 4 18,3
с 0 0,9с1 0,5с 2 4с3 0,7с 4 23,8
с 0 1,1с1 0,7с 2 5с 3 0,8с 4 29,3
с 0 1,3с1 0,8с 2 6с 3 0,9с 4 34,5
с 0 1,4с1 0,9с 2 6,5с 3 с 4 37,5
с 0 1,5с1 с 2 7с3 1,1с 4 40,5
Решая её, получаем коэффициенты модели (1.22):
с0 1,
с1 2 с 2 3 с3 4 с 4 5 .
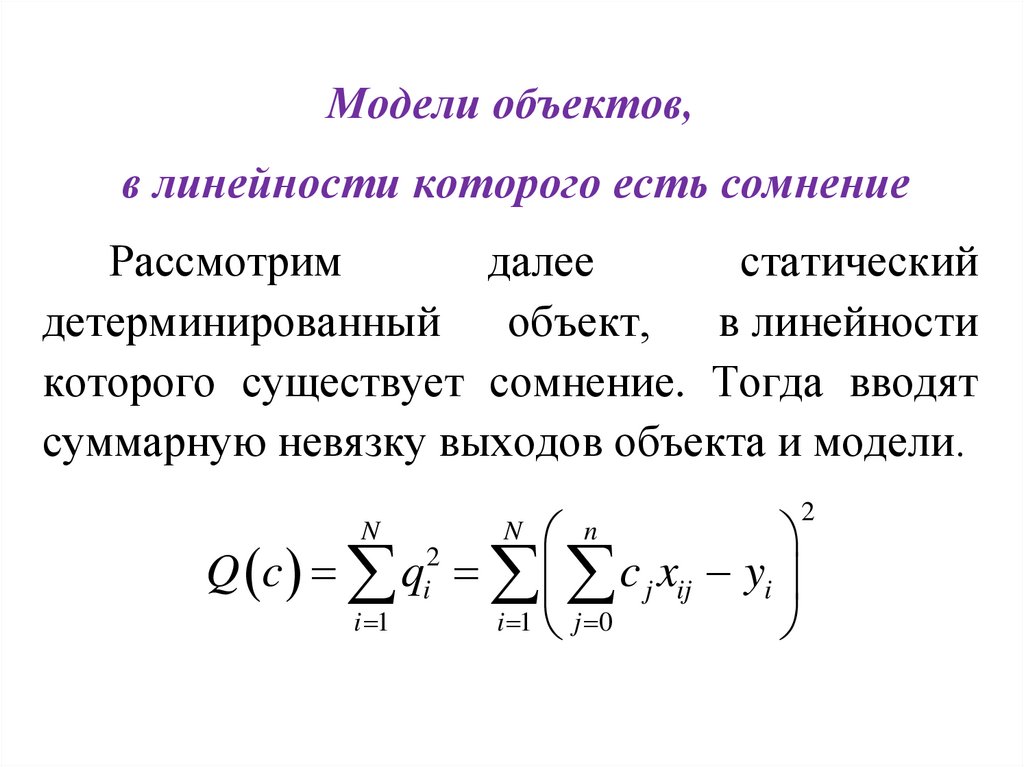
103.
Модели объектов,в линейности которого есть сомнение
Рассмотрим
далее
статический
детерминированный объект, в линейности
которого существует сомнение. Тогда вводят
суммарную невязку выходов объекта и модели.
Q c q c j xij yi
i 1
i 1 j 0
N
N
2
i
n
2
104.
Решаем задачу минимизации невязки иполучаем уравнения:
N n
Q c
2 c j xij yi xik 0
;
ck
i 1 j 0
n
c j xij xik yi xik 0, k 0, n (1.28)
i 1 j 0
N
105.
Если выполняется (1.27), то для строго линейногообъекта решения (1.22) и (1.28) совпадают. Если
(1.27) не выполняется, то требуется:
1. Повторить измерения, считая, что предыдущие
отразили не сильно структуру модели.
2. Если первый пункт плана не поможет, то
необходимо понизить число идентифицируемых
параметров, исключая из рассмотрения один из
входов, а именно тот, который мало изменяется
(последний в ранжированном ряду). Выполнять,
пока не выполниться (1.27).
106.
ПримерПусть m = 1, n = 3, тогда модель имеет вид:
y c0 c1 x1 с2 x2 c3 x3 .
Информация об объекте дана в виде N = 5 пар:
( x1 , y1 ) ( x11 , x12 , x13 , y1 ) (0,5;1; 3;16, 699)
( x2 , y2 ) ( x21 , x22 , x23 , y2 ) (0, 7; 3; 5; 28,568)
( x3 , y3 ) ( x31 , x32 , x33 , y3 ) (0,9; 4; 7; 37,117)
( x4 , y4 ) ( x41 , x42 , x43 , y4 ) (1, 2; 5; 8; 43, 208)
( x5 , y5 ) ( x51 , x52 , x53 , y5 ) (1,5; 7;10; 55,163)
107.
Измерения даны с погрешностью. Образуемневязки на каждом измерении и решим систему
(1.28):
3
c j xij xik yi xik 0 .
i 1 j 0
5
Учитывая что xi 0 1 , раскрывая внутреннюю,
сумму получим:
5
c x c x x c x x c x x y x 0 .
i 1
0 ik
1 i1 ik
2 i 2 ik
3 i 3 ik
i ik
(1.29)
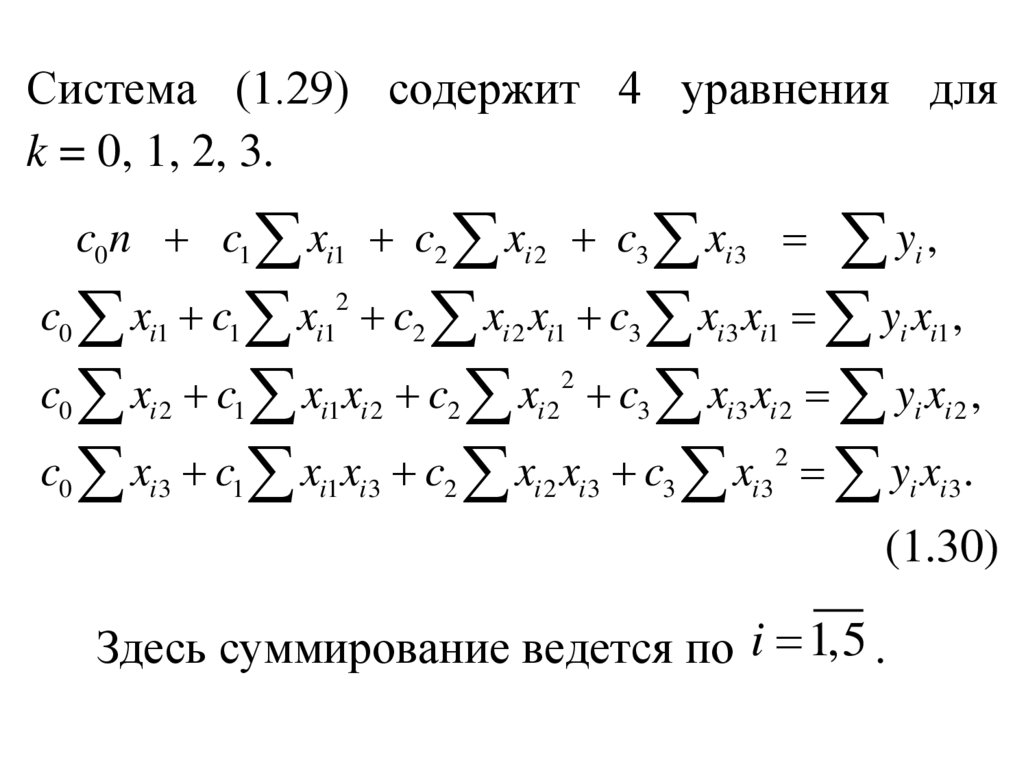
108.
Система (1.29) содержит 4 уравнения дляk = 0, 1, 2, 3.
c0 n c1 xi1 c2 xi 2 c3 xi 3
y ,
c x c x c x x c x x y x ,
c x c x x c x c x x y x ,
c x c x x c x x c x y x .
0
i1
1
2
i1
2
i 2 i1
i
3
i 3 i1
i i1
3
i3 i 2
i i2
2
0
i2
1
i1 i 2
2
i2
2
0
i3
1
i1 i 3
2
i 2 i3
3
i3
i i3
(1.30)
Здесь суммирование ведется по i 1,5 .
109.
110.
Составляем систему вида (1.30):5с0 4,8с1 20с2 33с3 180, 76;
4,8с0 5, 24с1 22, 7с2 35,9с3 196,35;
20с0 22, 7с1 100с2 156с3 853, 05;
33с0 35,9с1 156с2 247с3 1350, 05.
В результате решения получаем ответ:
с0 5,38, с1 0,79, с2 3,33, с3 2,53.
111.
Лекция 8Графическая идентификация
111
112.
Графическая идентификациядинамических объектов
Передаточная функция
Пусть
детерминированный
линейный
динамический
объект
описан
дифференциальным уравнением вида:
d n y (t )
d n 1 y (t )
dy (t )
an
an 1
... a1
a0 y (t )
n
n 1
dt
dt
dt
d m x(t )
d m 1 x(t )
dx(t )
bm
bm 1
... b1
b0 x(t
m
m 1
dt
dt
dt
(1.31)
Данное уравнение описывает связь между
входной величиной x(t) и выходной – y(t).
113.
Преобразованием Лапласа называют соотношениеX (s) x t e st dt
0
(1.32)
ставящее функции x(t ) вещественного переменного в
соответствие функцию X ( s ) комплексного переменного
s j . При этом x(t ) называют оригиналом, а X (s) –
изображением или изображением по Лапласу.
То, что x(t )
записывается так:
имеет
своим
изображением
X (s) L( x(t )),
то, что оригиналом X (s) является x(t ) :
x t L 1 X s .
X ( s)
114.
Преобразование Лапласа обладает следующими основнымисвойствами:
1. L(kx(t )) kX (s),
2. L x(t ) y(t ) X (s) Y (s),
3. L( x (t )) s X ( s), при x(0) 0,
t
X ( s)
L x(t )dt
, при x(0) 0,
4.
s
0
s
L
(
x
(
t
))
e
X (s), при L( x(t )) X (s),
5.
6. Теорема о свертке: если Y
s X1 s X 2 s , то
y (t ) x1 ( ) x2 (t )d
0
.
115.
Передаточной функцией динамического объектаназывается отношение изображения по Лапласу
выходной величины к изображению по Лапласу
входной величины при нулевых начальных условиях.
Y s
G s
X s
Если передаточная функция G(s) известна, то она
полностью определяет выход объекта при известном
входе:
Y s G s X s .
(1.35)
116.
Дляопределения
передаточной
функции
динамического объекта нужно сначала при нулевых
начальных условиях преобразовать по Лапласу обе
части дифференциального уравнения.
n 1
n
d y (t )
d y (t )
dy (t )
an
an 1
... a1
a0 y (t )
n
n 1
dt
dt
dt
m
m 1
d x(t )
d x(t )
dx(t )
bm
bm 1
... b1
b0 x(t ).
m
m 1
dt
dt
dt
Y s an s an 1s
n
n 1
... a1s a0
X s bm s bm 1s
m
m 1
(1.33)
... b1s b0
117.
Тогдапередаточная
функция
объекта
дифференциальным уравнением (1.31) принимает вид:
с
Y s
b0 b1s b2 s 2 ... bn s n
G s
2
m
X s a0 a1s a2 s ... am s .
(1.34)
Многочлен, стоящий в знаменатели передаточной
функции называется характеристическим многочленом.
Корни характеристического многочлена называются
полюсами передаточной функции.
Корни многочлена числителя – называются нулями
передаточной функции.
Фактически, все свойства объекта характеризуются
количеством и значением нулей и полюсов передаточной
функции, поэтому нули и полюса называют иначе
характеристическими точками передаточной функции.
118.
Временные характеристикиДля того чтобы сравнивать поведение
различных систем и объектов, следует
рассматривать
строго
определенное,
нормированное
изменение
воздействий.
Такими типовыми воздействиями являются
единичное ступенчатое воздействие и
единичное импульсное воздействие.
119.
Весьма часто имеет место резкое (мгновенное)изменение внешнего воздействия на САР,
например
включение
или
выключение
потребителей электрической энергии, увеличение
или уменьшение момента сопротивления на валу
регулируемого двигателя, мгновенный поворот
входного валика следящей системы. Изменением
воздействия считают мгновенное его изменение от
нуля до значения, равного единице.
120.
Для математической записи используют единичнуюступенчатую функцию
0 при t 0;
1(t )
(1.36)
1 при t 0.
Эта функция относится к классу обобщенных
функций, и график ее показан на рисунке 1.9.
Рис.1.9 График единичной ступенчатой функции
Реакцию объекта или системы при нулевых
начальных условиях на входную величину, являющуюся
единичной ступенчатой функцией времени, называют
переходной характеристикой h(t) объекта или системы.
121.
Изображение по Лапласу единичной ступенчатой1
функции (1.36) равно s , поэтому изображение
переходной характеристики:
1
H ( s) G( s) ,
s
( 1.37)
где G(s) – передаточная функция объекта или системы.
Тогда переходная характеристика принимает вид:
h t L H s .
1
(1.38)
122.
Другими часто встречающимися изменениямивнешних воздействий являются их кратковременные, но
существенные по значению всплески, импульсы.
Например, порывы ветра, действующие на летательный
аппарат, ударная нагрузка на двигатель.
Нормированным
импульсным
воздействием
считается единичный импульс, то есть импульс, у
которого произведение длительности на величину равно
единице. На рисунке 1.10 изображены графики
единичных импульсов:
g1tu1 g 2tu 2 g3tu 3 1,
где tu1 достаточно мало.
123.
Рис 1.10. Графики единичных импульсов124.
Пределом, к которому стремится единичныйимпульс, когда его продолжительность стремится
к нулю, есть единичная импульсная функция
0 при t 0,
(t )
при t 0;
(
t
)
dt
1.
(1.39)
125.
Реакцию элемента или системы на единичнуюимпульсную функцию называют импульсной
переходной
характеристикой
(ИПХ)
или
весовой функцией. Она равна производной от
переходной характеристики:
dh(t )
g (t )
.
dt
126.
Изображениепо
Лапласу
единичного
импульса L t 1. Поэтому изображение
импульсной переходной характеристики имеет
вид:
W (s) G(s) 1 G s ,
( 1.40)
то есть изображение по Лапласу ИПХ равно
передаточной функции объекта. Значит ИПХ
объекта примет вид:
g t L G s .
1
(1.41)
127.
Частотные характеристикиЕсли на вход объекта (1.31) подавать
гармоническое воздействие, например Авх sin ,
где ω – частота колебаний гармоники и Авх – ее
амплитуда, то на выходе, то на выходе также
будет гармонический сигнал Авых sin , где
Авых – его амплитуда и φ – сдвиг фаз между
входным и выходным сигналом, то есть разность
между моментами времени пересечения оси
абсцисс выходным и входным сигналом в том же
периоде колебаний.
128.
Тогда при изменении параметра ωи
измерении параметров Авх, Авых и φ можно
получить
амплитудно-фазово-частотную
характеристику (АФЧХ) динамического объекта:
G A e
,
Авых
где А А –
амплитудно-частотная
вх
характеристика (АЧХ), φ(ω) – фазово-частотная
характеристика (ФЧХ). АФЧХ используется в
основном
для
определения
устойчивости
динамического объекта.
129.
Графическая идентификацияс помощью переходной
характеристики
Рассмотрим основные виды динамических
звеньев и графическую идентификацию их
параметров
с
помощью
переходной
характеристики. В случае такой идентификации
на вход звена подается единичное ступенчатое
воздействие
и
фиксируется
переходная
характеристика. По ее виду и положению в
координатных осях определяются искомые
передаточные функции и их параметры.
130.
Апериодическое звено первого порядкаописывается
линейным
дифференциальным
уравнением первого порядка:
dy (t )
T
y (t ) Kx(t ) ,
dt
(1.42)
где K – коэффициент усиления; T – постоянная
времени,
характеризующая
инерционность
системы, то есть продолжительность переходного
процесса в ней. Поскольку постоянная времени
характеризует некоторый временной интервал, то
ее величина должна быть всегда положительной,
то есть T > 0.
131.
Примерами этого звена служат сервопривод,охваченный жесткой обратной связью, судовой дизель
без регулятора, холодильная камера.
Передаточная функция апериодического звена
первого порядка имеет вид:
K
G( s)
Ts 1 .
(1.43)
Очевидно, что нулей у выражения (1.43) нет, а
полюс
один,
причем
действительный
и
отрицательный.
132.
Согласноформуле
(1.38)
для
нахождения
изображения по Лапласу искомой переходной
характеристики надо умножить передаточную
функцию (1.43) на изображение единичного
ступенчатого воздействия:
K
K 1
H s
Ts 1 s s Ts 1 .
(1.44)
133.
Чтобы найти обратное преобразованиеЛапласа воспользуемся таблицей (см. прил.1,
табл.1).
Из таблицы следует, что оригиналом выражения
вида:
1
Y s
s Ts 1
является следующая функция времени:
t
T
y (t ) 1 e .
134.
Применив свойствоЛапласа, получим:
1
преобразования
K
h t L
K 1 e
s Ts 1
1
Из (1.45)
значением
является:
видно, что
переходной
t
T
. (1.45)
установившимся
характеристики
t
y уст lim K 1 e T K
t
.
(1.46)
135.
Из формулы (1.45) видно, что при t = Tзначение переходной характеристики равно:
T
1
T
h T K 1 e K 1 e 0,63K
.
(1.45)
Таким образом, постоянная времени T равна
отрезку времени, за которое переходная
характеристика h(t) достигает 63% своей
установившейся величины.
Коэффициент передачи K определяется как
значение установившейся величины.
136.
Рис. 1.11. Нахождение Т = 4, K = 2.137.
Постоянную времени Т можно определить подругому: провести касательную к графику h(t)при t = 0 до точки пересечения с уровнем
установившейся величины сигнала. Точка
пересечения соответствует Т с момента
подачи входного воздействия (рис. 1.12).
138.
Рис. 1.12. Нахождение T путем построениякасательной
139.
Уравнение касательной кфункции в точке t = 0 имеет вид:
графику
sk t h 0 h 0 t ,
где
h 0 K 1 e 0 ,
0
K
h t e
T
t
T
K 0 K
h
0
e
,
T
T .
140.
Тогда уравнение касательной примет вид:K
sk t t .
T
Причем, если t = T, то
sk T K .
141.
Большинствотехнологических
объектов
характеризуется наличием чистого запаздывания в
каналах
регулирования.
Запаздывание,
возникающее при протекании потока вещества по
длинным
трубопроводам,
носит
название
транспортного запаздывания. Запаздывание
возможно и в результате использования в системе
регулирования
периодически
действующих
приборов или регуляторов – таких, как газовый
хроматограф или цифровая вычислительная
машина, включенная в цепь обратной связи.
142.
Рассмотрим апериодическое звено первогопорядка запаздыванием.
Если переходная характеристика запаздывает
на время τ, то есть равна нулю в течение
промежутка τ после приложения ступенчатого
сигнала, как показано на рис. 1.13, то система
имеет чисто временное запаздывание.
143.
Рис. 1.13 Переходная характеристика звена сзапаздыванием
144.
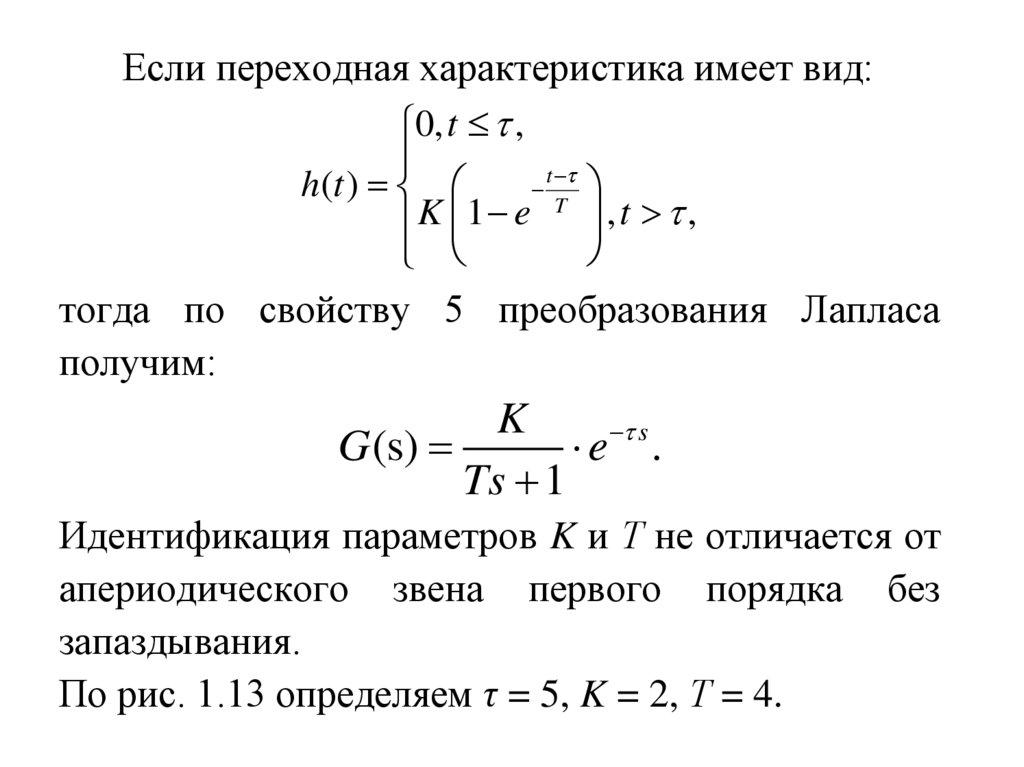
Если переходная характеристика имеет вид:0, t ,
t
h(t )
T
,t ,
K 1 e
тогда по свойству 5 преобразования Лапласа
получим:
K
e s .
G (s)
Ts 1
Идентификация параметров K и Т не отличается от
апериодического звена первого порядка без
запаздывания.
По рис. 1.13 определяем τ = 5, K = 2, Т = 4.
145.
Рассмотрим апериодическое звено второгопорядка. Апериодическое звено второго порядка
описывается линейным дифференциальным
уравнением второго порядка:
2
d y(t )
dy(t )
TT
y(t ) Kx(t )
1 2
2 (T1 T2 )
dt
dt
,
(1.46)
где K – коэффициент усиления; T1 и T2 –
постоянные времени, также характеризующая
инерционность
системы,
то
есть
продолжительность переходного процесса в ней.
(T1 > 0 и T2 > 0).
146.
На величины T1 и T2 накладывается условие:T1 T2 4TT
1 2 0.
2
Примером этого звена служит центробежный
датчик скорости при большой силе гидравлического
трения.
Передаточная функция апериодического звена 2
порядка имеет вид:
K
G( s)
(T1s 1)(T2 s 1) .
(1.47)
Очевидно, что выражение (1.47) имеет два
действительных отрицательных полюса. Нулей нет.
147.
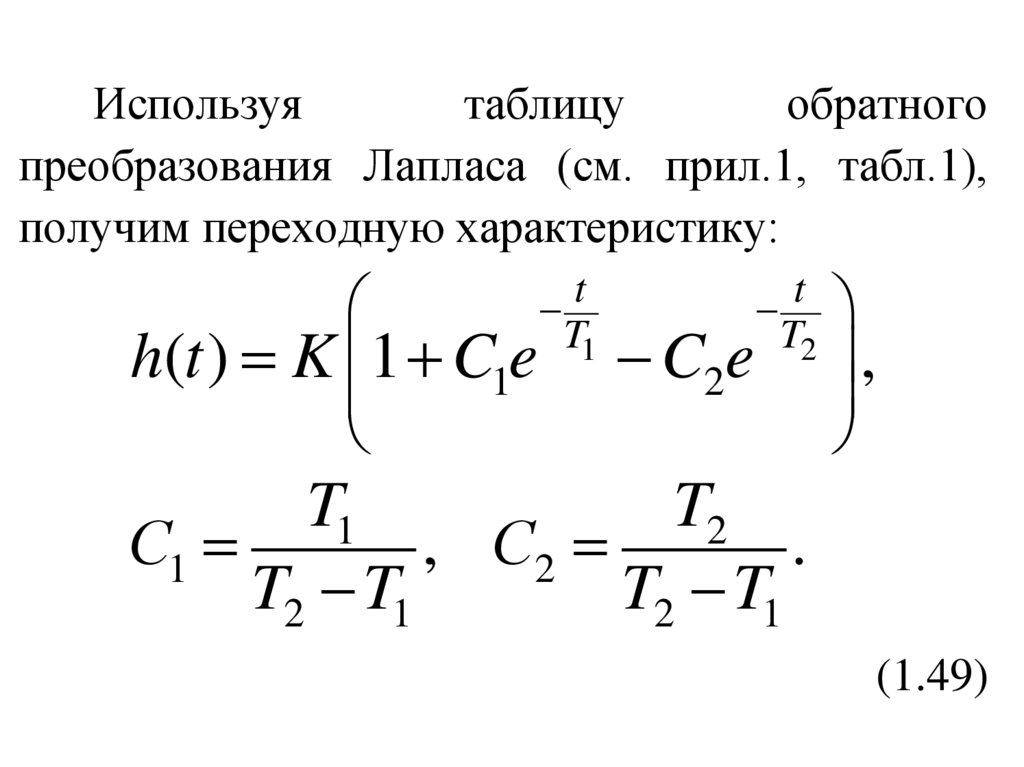
Используятаблицу
обратного
преобразования Лапласа (см. прил.1, табл.1),
получим переходную характеристику:
h(t ) K 1 C1e
t
T1
C2e
t
T2
,
T1
T2
С1
, С2
.
T2 T1
T2 T1
(1.49)
148.
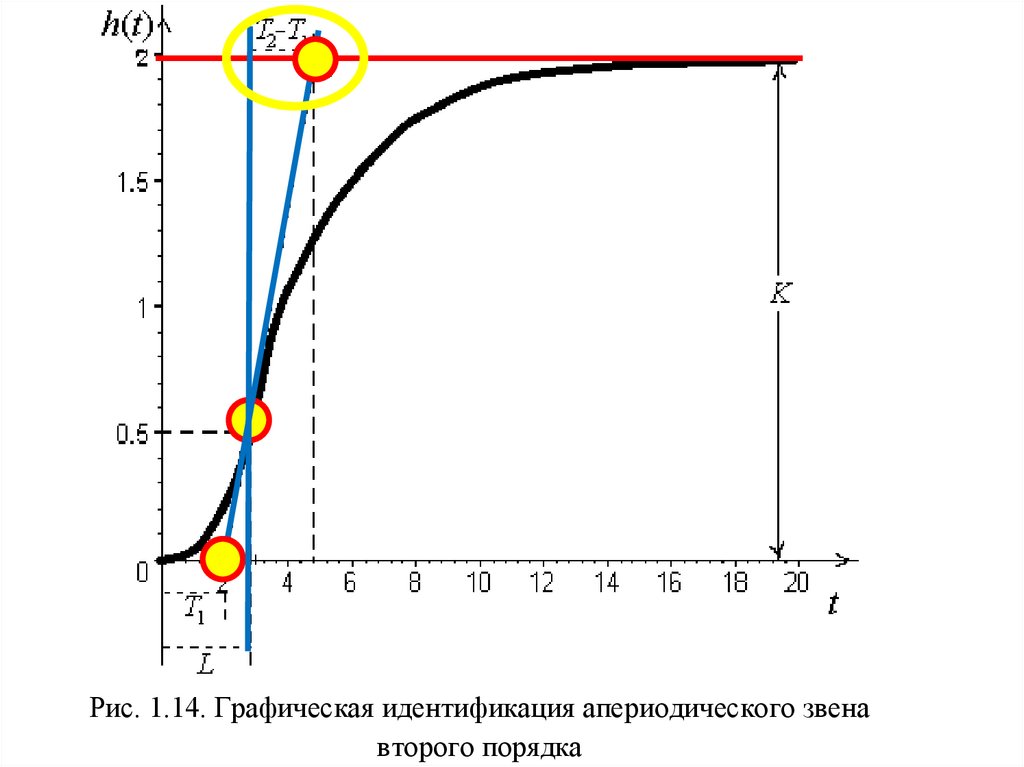
Рис. 1.14. Графическая идентификация апериодического звенавторого порядка
149.
Из вида переходной характеристики постоянныевремени Т1 и Т2 и коэффициент передачи K могут быть
определены только приблизительно.
Коэффициент передачи K определяется как значение
установившейся величины.
Сначала определяется точка перегиба В(b1, b2), где
T2T1
T2
L
ln – абсцисса точки перегиба.
T2 T1 T1
Касательная к h(t) в точке В отсекает на оси абсцисс
постоянную Т1. Точка С(с1, K) – точка пересечения
касательной с линией установившегося значения K.
Расстояние c1 – b1 = T2 – T1.
Результат можно проверить с помощью величины L.
150.
Для проверки адекватности полученной переходнойхарактеристики нужно построить h(t) и сравнить с
экспериментальными данными.
Неточность в определении коэффициентов связано с
визуальным определением точки В и неточным
проведением касательной. Уточнить нахождение точки
В можно использовав численное дифференцирование.
Точка перегиба, это точка, где h t = 0 ;
dh t h ti h ti t
h t
;
dt
t
d 2 h t h ti h ti t h ti 2h ti t h ti 2 t
h t
2
2
dt
t
t
(1.50)
t шаг, с которым измеряют значения h(t).
151.
Для того, чтобы уточнить точку перегибаВ следует проверить на близость к нулю
конечные разности 2-го порядка.
Чтобы
убедится
в
правильности
построенной модели, можно построить по
формулам (1.49) переходную характеристику
и сравнить ее с кривой, данной на рис.1.14.
152.
Рассмотрим колебательное звено второгопорядка.
Описывается
дифференциальным
уравнением второго порядка:
2
d
y(t )
dy(t )
2
T
y(t ) Kx(t )
2 2T
dt
dt
, (1.51)
где K – коэффициент передачи, то есть отношение
выходного и входного сигналов в установившемся
состоянии;
153.
T > 0 – постоянная времени, характеризующаяинерционность
системы,
то
есть
продолжительность переходного процесса;
T 1 , где ω – угловая частота свободных
колебаний);
ξ – коэффициент (декремент)
затухания
(демпфирования),
который
характеризует
рассеяние энергии в звене (0 < ξ < 1). При ξ 1
колебательное
звено
превращается
в
апериодическое звено второго порядка.
154.
Передаточная функция колебательного звенаимеет вид:
K
G( s) 2 2
.
T s 2T s 1
(1.52)
Примером этого звена служит центробежный
датчик скорости при малой силе гидравлического
трения. Очевидно, что полюса выражения (1.52) –
комплексно-сопряженные,
причем,
имеющие
отрицательную мнимую часть. Нулей нет.
155.
Рис. 1.15. Переходные характеристикиколебательного звена при различных значениях
коэффициента демпфирования
156.
Подадим на вход единичное ступенчатоевоздействие.
Согласно
таблице
обратного
преобразования Лапласа (см. прил.1, табл.1),
переходная характеристика примет вид:
h(t ) 1 Ce
t
sin ( t ),
(1.53)
2
1
1
C
arctg
.
T ,
T ,
T,
Соотношение
между
коэффициентом
демпфирования ξ и перерегулированием в
процентах
от
установившейся
величины
переходной функции показано на рисунке 1.16.
157.
Рис. 1.16. Номограмма, показывающаясоотношения между перерегулированием и
значением ξ
158.
Если коэффициент демпфирования ξопределяется графически в соответствии с
рисунком 1.16, то собственная частота системы
ω может быть определена следующем образом:
где
2
,
колебаний.
1
2 ,
– период демпфированных
159.
Величинаопределяется с помощью
рисунка 1.17 по формуле:
A1
ln
A2 .
где А1 и А2 –
расстояния между линией
установившегося значения и экстремумами
первых двух колебаний.
160.
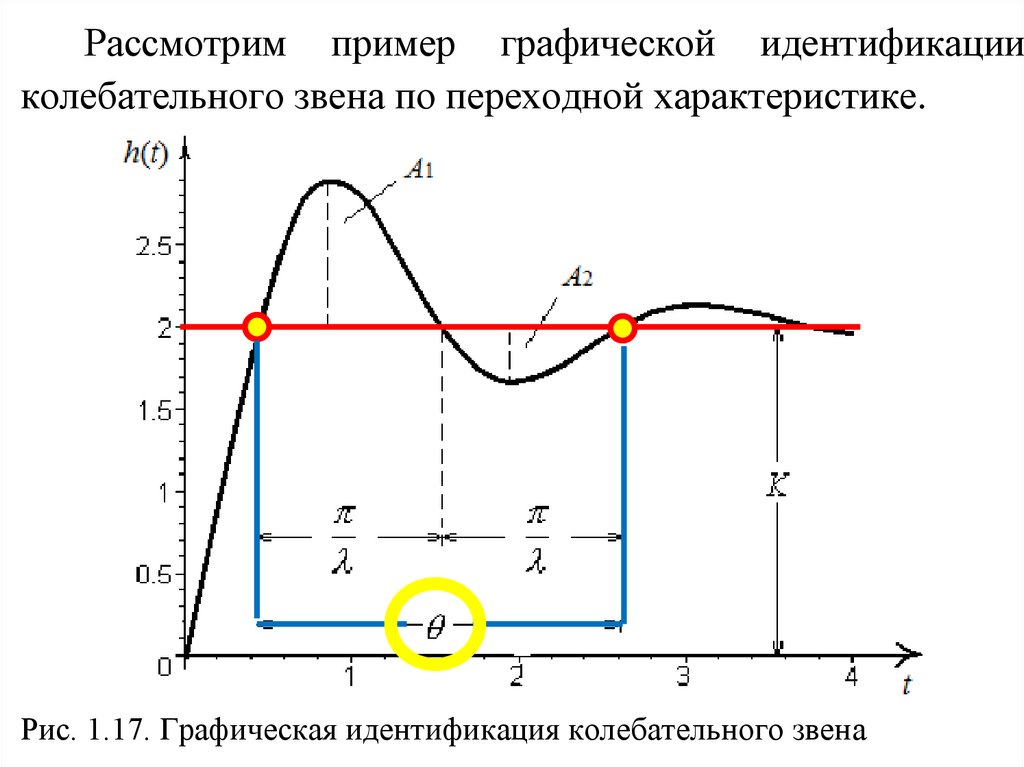
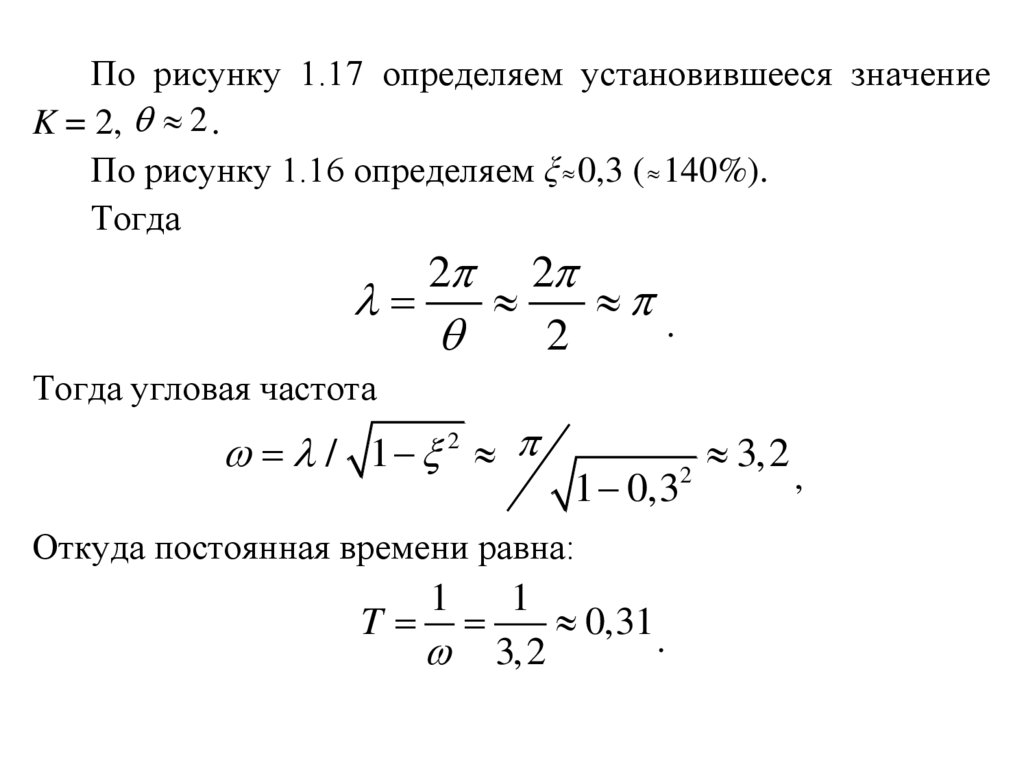
Рассмотрим пример графической идентификацииколебательного звена по переходной характеристике.
Рис. 1.17. Графическая идентификация колебательного звена
161.
По рисунку 1.17 определяем установившееся значениеK = 2, 2 .
По рисунку 1.16 определяем ξ 0,3 ( 140%).
Тогда
2
2
.
2
Тогда угловая частота
/ 1 2
1 0,3
Откуда постоянная времени равна:
1
1
T
0,31 .
3,2
2
3,2
,
162.
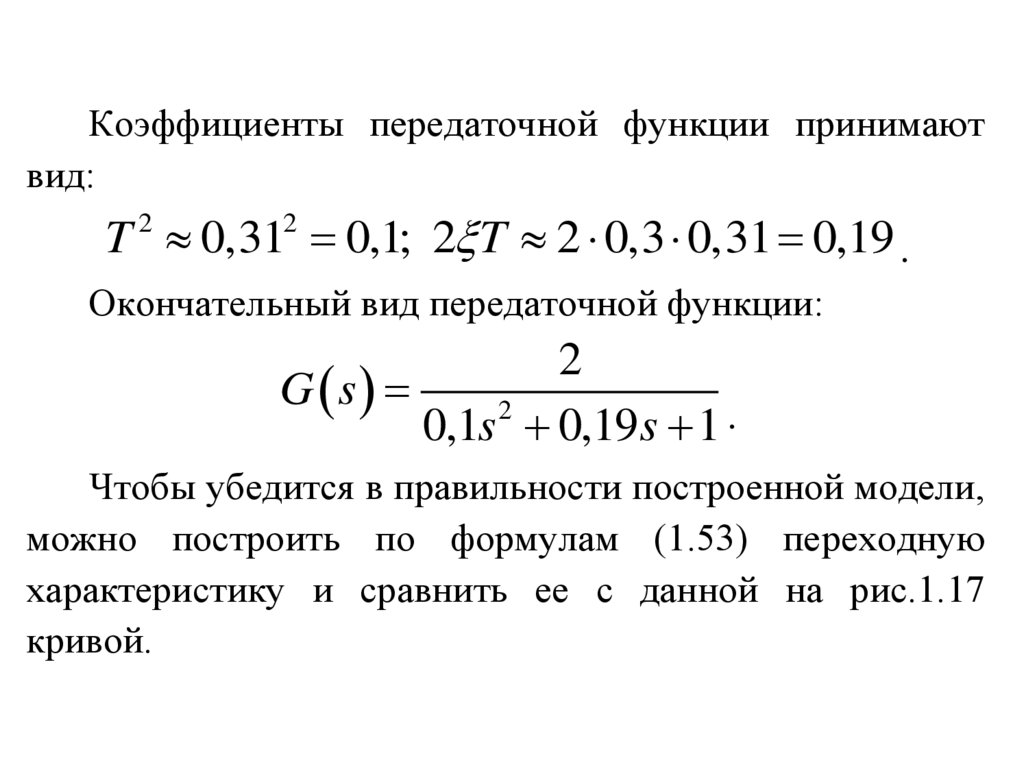
Коэффициенты передаточной функции принимаютвид:
T 0,31 0,1; 2 T 2 0,3 0,31 0,19 .
2
2
Окончательный вид передаточной функции:
2
G s
2
0,1s 0,19s 1 .
Чтобы убедится в правильности построенной модели,
можно построить по формулам (1.53) переходную
характеристику и сравнить ее с данной на рис.1.17
кривой.
163.
Консервативное звено является частным случаемколебательного звена при ξ = 0.
Рис. 1.18. Графическая идентификация консервативного звена
164.
Его передаточная функция равна:K
K
G ( p)
2
2 2
1 T p 1 p
2
,
(1.54)
где ω =1/Т – угловая частота свободных колебаний, K
– отношение выходного и входного сигналов в
установившемся состоянии.
Переходная характеристика звена (1.54) имеет
h(t ) K (1 cos t ) .
вид:
Для идентификации необходимо определить
только величины ω, K.
165.
На рисунке 1.18 коэффициент K определяется какзначение установившейся величины, K = 1.
2
2
0
2,99 .
2,1
Значит, передаточная функция принимает вид:
K
1
G ( p) 2
.
2
s 2 1 0,11s 1
166.
Рассмотриминтегрирующие
звенья.
Они
характеризуются наличием полюса передаточной
функции, равного нулю.
Идеальное
интегрирующее
передаточную функцию вида:
звено
K
G (s)
s .
Переходная характеристика примет вид:
h(t ) Kt
имеет
167.
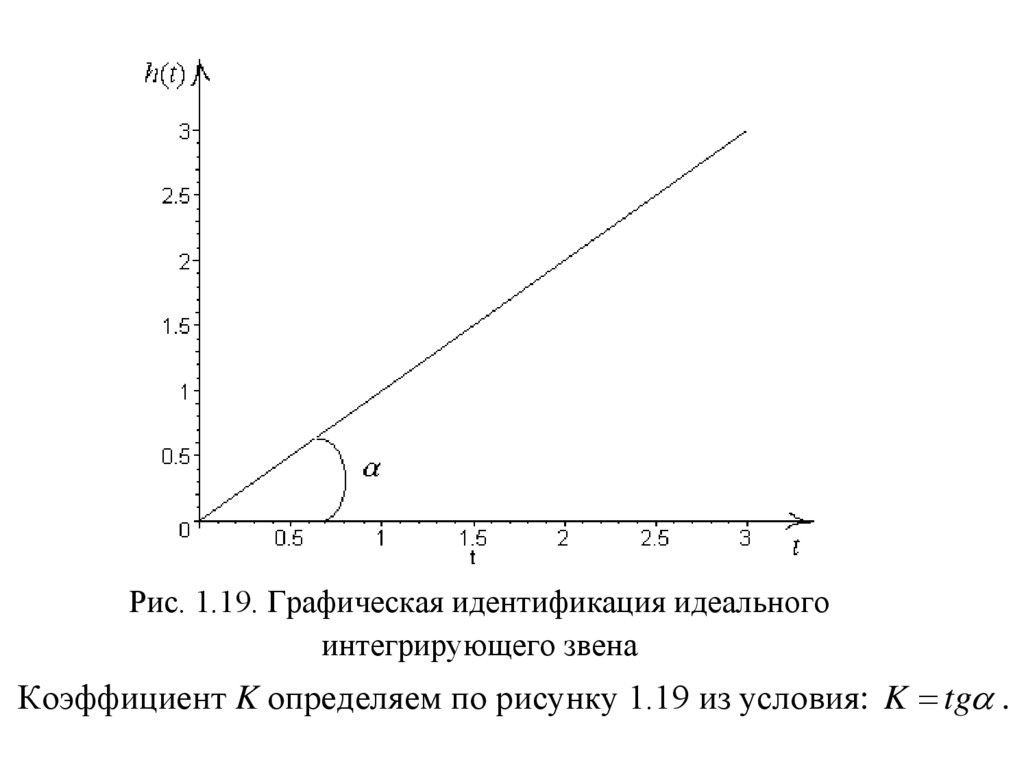
Рис. 1.19. Графическая идентификация идеальногоинтегрирующего звена
Коэффициент K определяем по рисунку 1.19 из условия: K tg .
168.
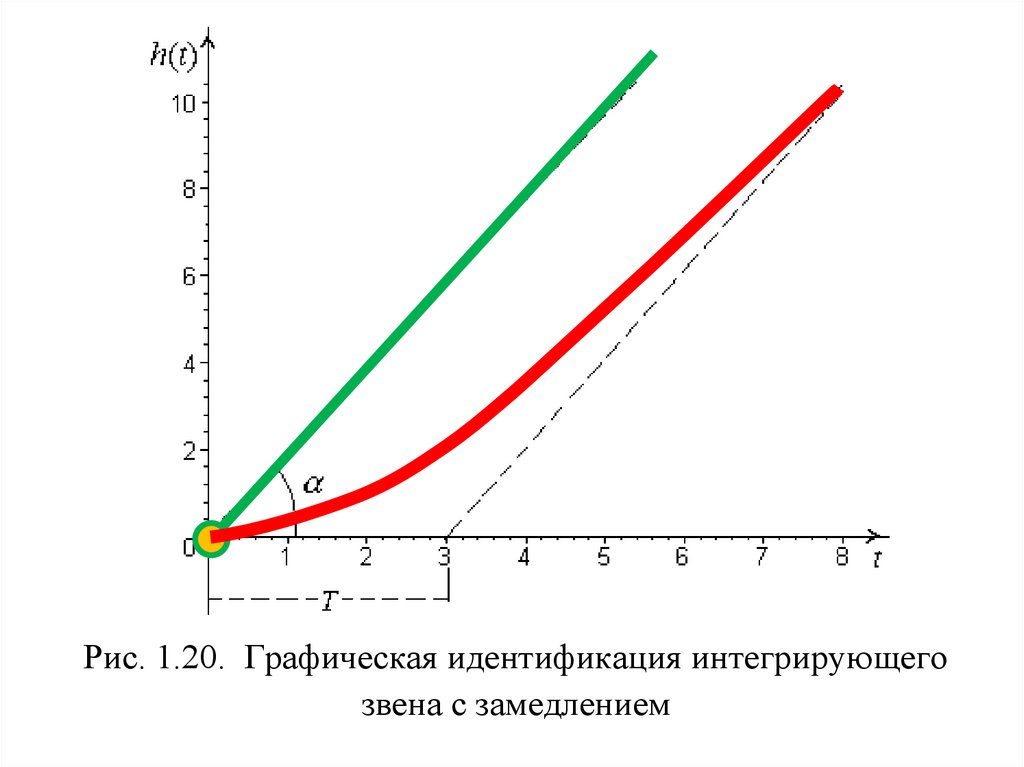
Интегрирующее звено с замедлением имеетпередаточную функцию вида:
K
G( s)
s(Ts 1) .
Заметим, что здесь скобка (Ts + 1), определяющая
наличие отрицательного корня, стоит в знаменателе.
Такие звенья называются инерционными. Помимо
интегрирующего
звена
с
замедлением
к
инерционным звеньям относятся апериодические
звенья 1, 2 и более высоких порядков.
169.
В формуле изображения по Лапласу выходногосигнала появляется вторая степень переменной s:
K
Y s G(s) X s 2
,
s (Ts 1)
в переходной характеристике – слагаемое t:
t
h(t ) K t T 1 e T .
Теперь K уже не является установившимся значением,
таr как
y уст lim h t
t
170.
Рис. 1.20. Графическая идентификация интегрирующегозвена с замедлением
171.
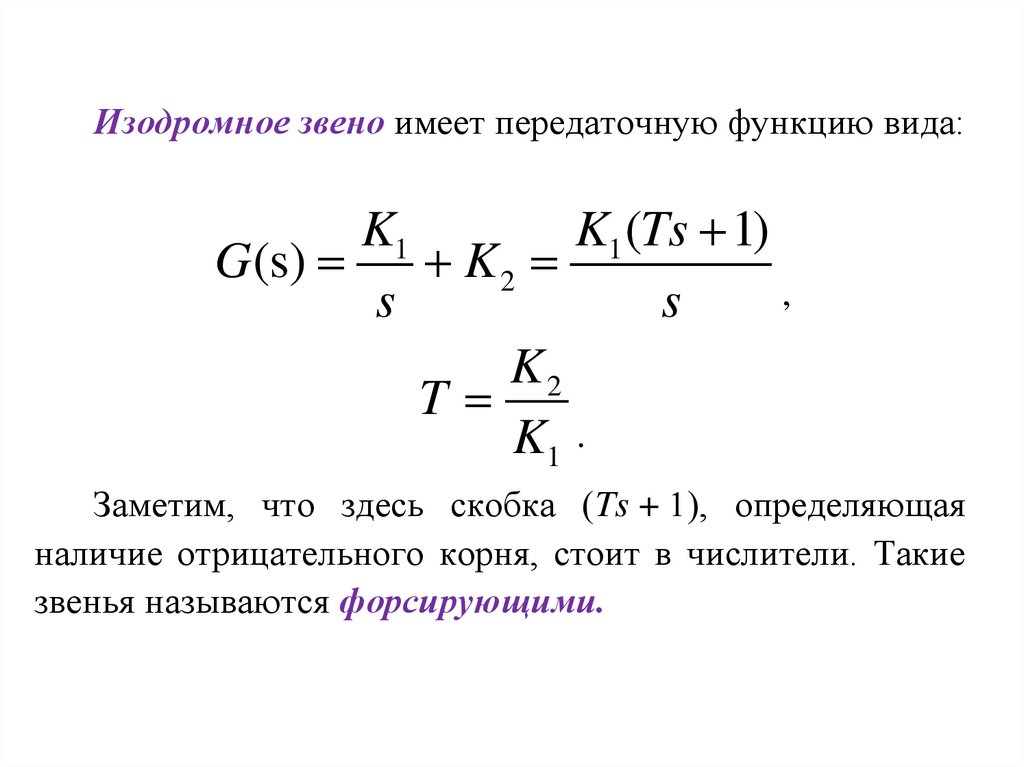
Изодромное звено имеет передаточную функцию вида:K1
K1 (Ts 1)
G (s)
K2
,
s
s
K2
T
K1 .
Заметим, что здесь скобка (Ts + 1), определяющая
наличие отрицательного корня, стоит в числители. Такие
звенья называются форсирующими.
172.
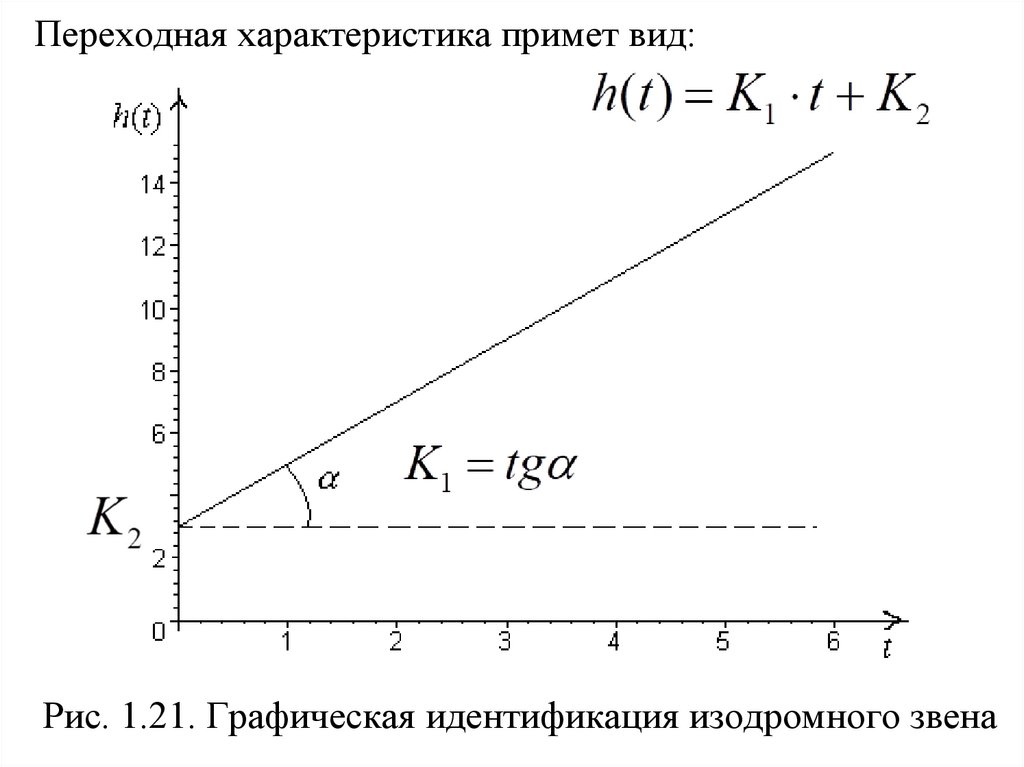
Переходная характеристика примет вид:Рис. 1.21. Графическая идентификация изодромного звена
173.
Рассмотримдифференцирующие
звенья.
Они
характеризуются наличием нулевого корня в числителе.
Другими словами, они имеют нуль равный нулю. Это
выражается в виде множителя s, стоящего в числителе.
Идеальное
дифференцирующее
передаточную функцию вида:
G ( s) Ks .
Переходная характеристика равна:
h(t ) K (t ) .
звено
имеет
174.
Дифференциальное звено с замедлением имеетпередаточную функцию вида:
Ks
G( s)
Ts 1 .
Переходная характеристика равна:
t
T
K
h(t ) e .
T
(1.55)
175.
Рис. 1.22. Графическая идентификациядифференцирующего звена с замедлением
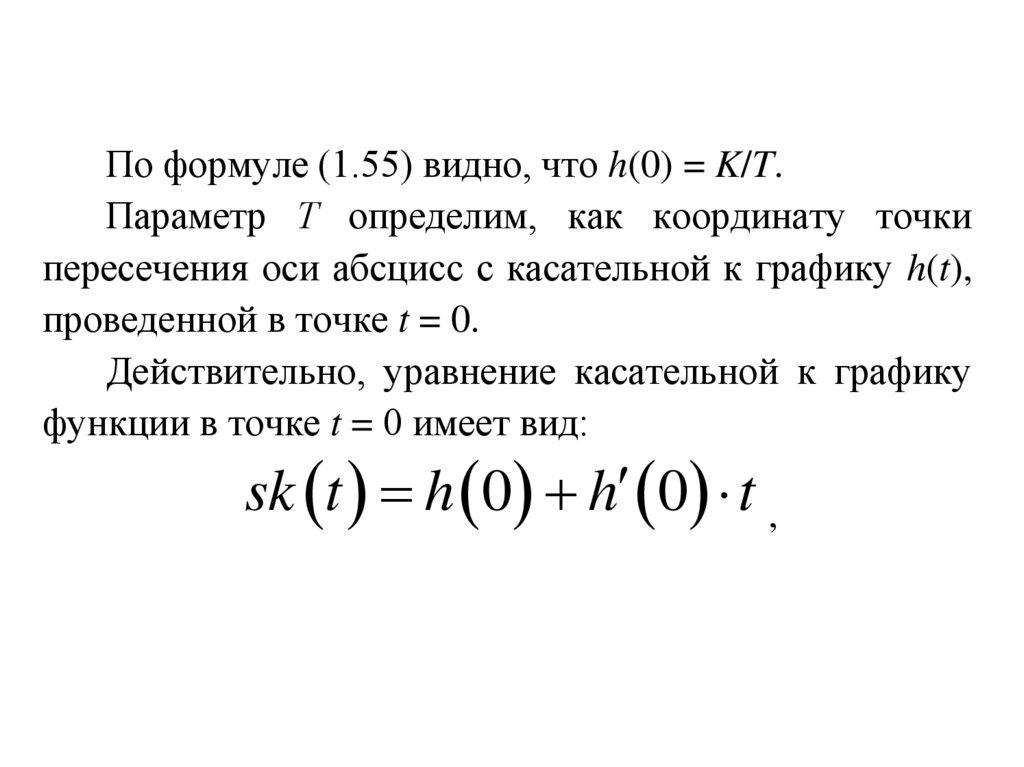
176.
По формуле (1.55) видно, что h(0) = K/T.Параметр Т определим, как координату точки
пересечения оси абсцисс с касательной к графику h(t),
проведенной в точке t = 0.
Действительно, уравнение касательной к графику
функции в точке t = 0 имеет вид:
sk t h 0 h 0 t ,
177.
гдеh 0 K
K
h t 2 e
T
t
T
T,
K 0
K
h 0 2 e 2
,
T
T .
Тогда уравнение касательной примет вид:
K K
sk t 2 t
T T .
Причем, если t = T, то
sk T 0 .
178.
Лекция 9Непрерывные дроби
178
179.
Определение непрерывной дроби и формы еёпредставления
Пусть
комплексных
заданы
чисел
последовательности
a n 1 , bn 0 ,
тогда
бесконечной цепной или непрерывной дробью
называется выражение
an
b0 ; b0
bn
b1
a1
a2
b2
a3
b3
(1.56)
180.
Числа an , bn называютсяan
членами n-го звена bn
причем
а
непрерывной дроби;
an являются частными числителями,
bn
–
частными
непрерывной дроби (1.56).
знаменателями
181.
В дальнейшем считается, что все членынепрерывной дроби конечны и, более того, все
частные знаменатели отличны от нуля.
Кроме вида (1.56) используются:
a1 a2 a3
an
b0 , b b0 b b b ... ,
n
1
2
3
182.
ana1 a2
b0 ; b0
b1 b2
bn
an
an
b0 ; b0 K .
bn
bn
an
bn
,
183.
Если непрерывная дробь (1.56) содержит толькоконечное число звеньев n, что соответствует случаю
a n 1 0 , то она принимает вид:
a1 a 2
an
b0
b1 b 2 b n ,
и называется конечной непрерывной дробью,
величина
которой
определяется
с
помощью
обычных арифметических операций – обратного
рекуррентного алгоритма ((BR - алгоритм) –
backward recurence algorithm).
184.
Конечнуюнепрерывную
дробь (1.57) называют
n-ой подходящей дробью непрерывной дроби (1.56).
Таким образом, непрерывная дробь порождает
последовательность подходящих дробей.
Здесь Аn – числитель n-ой подходящей дроби, а Вn –
знаменатель n-ой подходящей дроби:
b0
b1
a1
An
Bn
(1.57)
an
bn
185.
Для бесконечной непрерывной дроби вводят понятиеее величины V, если
An
lim V
n B
.
n
Другими словами, если предел подходящих дробей
An
Vn
при n
существует, то его значение
Bn
называется величиной непрерывной дроби.
В противном случае говорят, что непрерывная дробь
an
b0 ; расходится.
bn
186.
Непрерывнаяследующим
дробь
(1.56)
рекуррентным
удовлетворяет
соотношениям,
позволяющим по известным значениям членов
непрерывной дроби находить последовательность
подходящих дробей:
An bn An 1 an An 2
Bn bn Bn 1 an Bn 2
(1.58)
187.
Из определения непрерывной дроби следует,что:
A0 b0
B0 1 ,
A1
a1 b1 b0 a1
b0
,
B1
b1
b1
188.
Они позволяют записать начальные значениядля
трехчленных
рекуррентных
соотношений
(1.58):
A0 b0 ; B0 1; A 1 1; B 1 0 .
Использование рекуррентных соотношений (1.58)
для расчета значения конечной непрерывной дроби
носит название прямого рекуррентного алгоритма
((FR-алгоритма) forword recurence algorithm).
189.
Обратныйрекуррентный
алгоритм
алгоритм) вычисления подходящих дробей
(BR-
Vn
основан на применении арифметических операций
для обыкновенных дробей путем вычисления
последовательно от “хвоста к голове”.
An
V
n
Пусть требуется вычислить
Bn .
190.
(n)n 1
Тогда полагая G
рассчитываем
(n)
n
G
: 0 ,
an
(n)
bn Gn 1 ,
а затем последовательно “от хвоста к голове”:
(n)
k
G
ak
(n)
bk Gk 1 при k = n – 1, n – 2, ... ,1.
Окончательно получаем Vn b0 G
(n)
1 .
191.
Длявычисления
Vn
требуется
только
n
операций умножения или деления и столько же
операций сложения.
Преимуществом данного алгоритма является то,
что он позволяет подсчитывать Vn для любого
натурального n, но при этом не получаются
предыдущие подходящие дроби V1 ,V2 ,
Vn 1 .
192.
В качестве примера найдем BR - алгоритмом V3 :V3 b0
a1
b1
a2
a3
b2
b3
a3
a1 (b2 b3 a3 )
b0
b0
a2 b3
b
b
b
a
b
a
b
1
2
3
3
1
2
3
b1
b2 b3 a3
b0 b1 b2 b3 a3 b0 b1 a2 b0 b3 a1 b2 b3 a1 a3
.
b1 b2 b3 a3 b1 a2b3
193.
Лекция 10ДробиТиле
193
194.
Идентификация статической характеристикинелинейного детерминированного объекта
дробями Тиле
Статические
характеристики
относятся
к
характеристикам установившегося режима и позволяют
количественно оценить процесс передачи информации,
энергии или вещества от окружающей среды к объекту
или между отдельными элементами объекта, то есть дают
численное значение связи регулируемых величин объекта
с его управляющими и возмущающими воздействиями при
x(t) = const, y(t) = const.
195.
Известно, что задача интерполяции некоторойфункции y = f(x), которой описывается установившийся
режим нелинейного детерминированного объекта с
одним входом и одним выходом, является одной из
основных в прикладных исследованиях.
Она часто возникает, если даны значения некоторой
величины на конечном множестве значений величины –
аргумента, входного значения. Пусть известны значения
функции f(x) в точках x0 , x1 , x2 , ..., xn , не обязательно
равностоящих друг от друга и не равных между собой.
196.
Построим последовательность функции по следующимсоотношениям:
0 ( x) f ( x);
x x0
x x0
1 x0 , x
;
0 ( x) 0 ( x0 ) f ( x) f ( x0 )
x x1
2 x0 , x1 , x
;
1 ( x0 , x) 1 ( x0 , x1 )
...
x xk 1
k x0 , x1 , ... xk 1 , x
k 1 x0 , x1 , x2 ,..., xk 2 , x x0 , x1 , ... , xk 2 , xk 1
...
где k = 1, 2, ..., n.
(1.59)
197.
Если предположим, x xk , то получим в (1.59):xk xk 1
k x0 , x1, ...xk 1, xk
k 1 x0 , x1, x2 , ..., xk 2 , xk k 1 x0 , x1, ..., xk 2 , xk 1 .
(1.60)
Выражение k x0 , x1 , ... xk 1 , xk называется обратной kой разделенной разностью функции f(x) для значений
аргумента x0 , x1 , ... , xk .
198.
Используя обратные разделенные разности, получимпоследовательно следующие тождества:
f ( x) 0 ( x);
f ( x) 0 ( x0 )
f ( x) 0 ( x0 )
f(x) 0 ( x0 )
...
x x0
;
1 x0 , x
x x0
x x1
1 x0 , x1
2 x0 , x1 , x
x x0
1 x0 , x1
;
x x1
2 x0 , x1 , x
x x2
3 x0 , x1 , x2 , x
(1.61)
199.
Таким образом, получили непрерывную дробь, вкоторой частные числители равны x xk (k = 0, 1, ..., n), а
частные знаменатели – k 1 x0 , x1 , x2 ,..., xk 1 .
f ( x) 0 ( x0 )
x x0
1 x0 , x1
x x1
2 x0 , x1 , x2
x x2
x xn 1
x xn
n x0 ,..., xn 1xn
n 1 x0 ,..., xn x
...
200.
Если один из частных числителей непрерывной дроби(1.61) равен нулю, то это звено и все последующие за ним
не влияют на значение непрерывной дроби и поэтому
могут быть отброшены. Если вместо х в выражение (1.61)
последовательно подставлять x0 , x1 , x2 , ..., xn , то f(x)
последовательно
f ( x0 ), f ( x1 ), ..., f ( xn ) .
будет
принимать
значения
201.
Таким образом, отбрасывая в непрерывной дроби(1.61) последнее звено, получаем интерполяционную
формулу в виде непрерывной дроби, позволяющей
осуществлять дробно-рациональную аппроксимацию
функции f(x):
0 ( x0 )
x x0
x x1
1 x0 , x1
2 x0 , x1 , x2
x xn 1
x0 , x1 , ..., xn 1 , xn
.
(1.62)
202.
Вычисление обратных разделенных разностей удобноосуществлять последовательно, располагая их в
следующей таблице:
x0
x1
x2
x3
f ( x0 )
f ( x1 ) 1 x0 , x1
f ( x2 ) 1 x0 , x2 2 x0 , x1, x2
f ( x3 ) 1 x0 , x3 2 x0 , x1, x3 3 x0 , x1, x2 , x3
xn f ( xn ) 1 x0 , xn 2 x0 , x1, xn 3 x0 , x1, x2 , xn
(1.63)
n x0 , x1, x2 ,..., xn 1, xn
Диагональные элементы этой таблицы определяют
частные знаменатели непрерывной дроби (1.62).
203.
ПримерПусть дана дробно-линейная функция
3 x
y
2 x ,
которая претерпевает в точках х = 2 разрыв второго
рода. Составим интерполяционную таблицу (1.63).
В последнем столбце условно обозначено деление
на нули знаком
.
204.
205.
4 13,5 4
0,4
5 1 0,6
8 4
3
7 1
1
2 4
9 1
1,4
12 4
7
206.
5 40,6 0,4
5
4
7
5
1 0,4
4
9
0,4
1,4
5
207.
7 55 5
9 5
5 5
208.
x0 1x1 4
x2 5
x3 7
x4 9
f ( x0 ) 4
f ( x1 ) 3,5
f ( x2 ) 8 3
f ( x3 ) 2
f ( x4 ) 12 7
1 x0 , x1 0,4
1 x0 , x2 0,6 2 x0 , x1 , x2 5
1 x0 , x3 1 2 x0 , x1 , x3 5 3
1 x0 , x4 1,4 2 x0 , x1, x4 5 3
x 1
fинт ( x) 4
x 4
0,4
5
209.
x 1x 1
fинт x 4
4
x 4
0,4 5 x 4
0,4
5
5
5
5 x 1 4 x 2 5 x 1
4
2 x 4
x 2
4 x 8 5x 5 x 3 3 x
f x
x 2
x 2 2 x
Выполнив алгебраические операции, получим, что
fинт ( x) f ( x) .
210.
Лекция 11Модифицированный метод
В. Висковатова
210
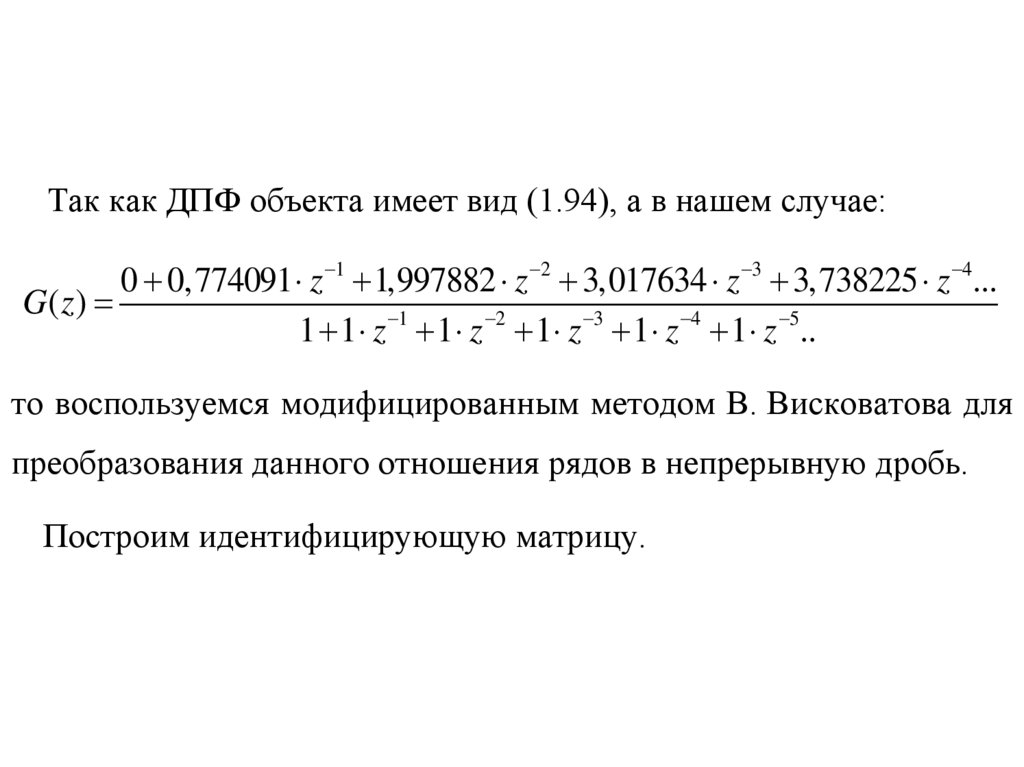
211.
Модифицированный метод ВисковатоваВ
случае,
когда
измерения
входов
и
выходов
непрерывного динамического объекта производятся в
фиксированные моменты времени с заданным шагом
дискретизации Δt, возникает необходимость представлять
его некоторой дискретной моделью, свойства которой, по
возможности, должны отражать свойства непрерывного
объекта.
Основными формами представления такой модели
являются дискретная передаточная функция и конечноразностное уравнение.
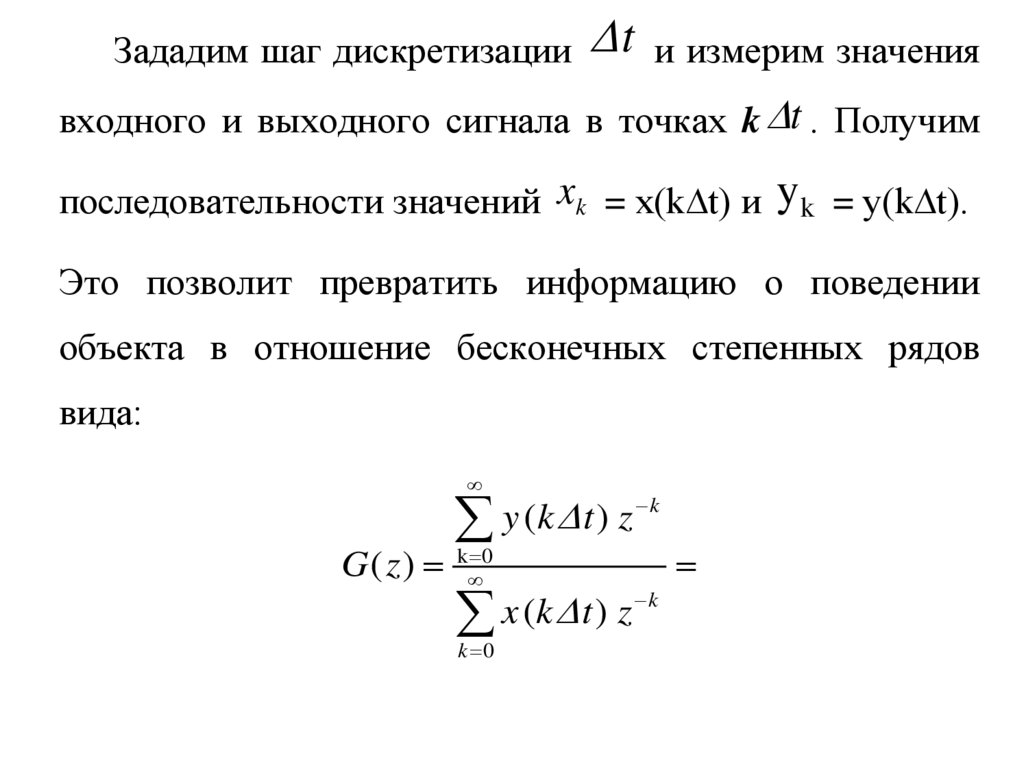
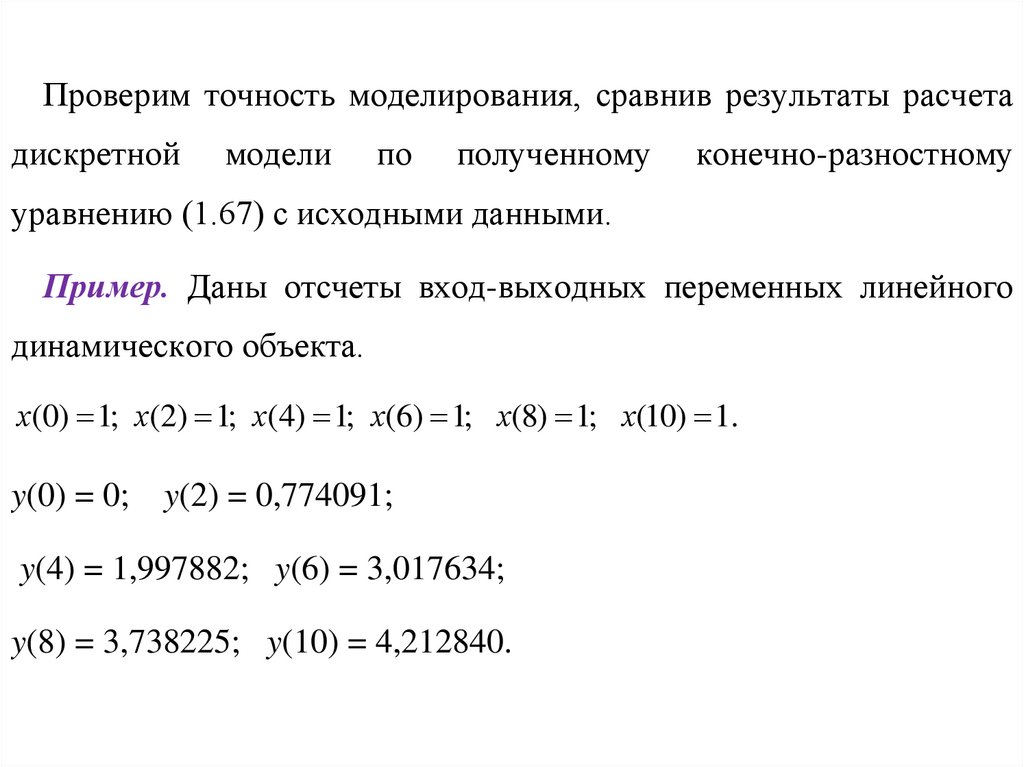
212.
Пусть значения входа x(t) и выхода y(t) непрерывногодинамического объекта с 1 входом и 1 выходом известны в
моменты времени 0, Δt, 2Δt, 3Δt, …, nΔt, … . Такие
значения сигналов называют отсчетами:
x0 = x(0), x1 = x(Δt), x2 = x(2Δt), …, xn = x(nΔt), …
y0 = y(0), y1 = y(Δt), y2 = y(2Δt), …, yn = y(nΔt), …
Z-преобразованием непрерывного сигнала x(t) называют
выражение:
X z Z x t x k t z k
k 0
(1.64)
213.
Z-преобразование,разложение
отрицательным
по
сути,
в бесконечный
степеням
Z-преобразования),
где
представляет
степенной
переменной
отсчеты
z
ряд
собой
по
(переменной
сигнала
являются
коэффициентами разложения.
Нетрудно заметить, что формула (1.64) является
интегральной
суммой
интеграла,
задающего
преобразование Лапласа, при условии, что Δt = 1 и z e .
s
Поэтому Z-преобразование иначе называют дискретным
преобразованием Лапласа.
214.
Дискретнойназывается
передаточной
отношение
функцией
Z-преобразования
(ДПФ)
выходного
сигнала к Z-преобразованию входного сигнала:
k
y
(
k
t
)
z
Y z k 0
G( z)
X z
k
x
(
k
t
)
z
k 0
1
2
3
y (0) y ( t ) z y (2 t ) z y (3 t ) z ...
x(0) x( t ) z 1 x(2 t ) z 2 x (3 t ) z 3 ...
(1.65)
215.
Если степенные ряды в числителе и знаменателе (1.65)конечные, то ДПФ можно заменить другой дискретной
моделью – конечно разностным уравнением (КРУ).
Заменим обозначения x[n] = x(nΔt) и y[n] = y(nΔt). Учтем
также,
что
умножение
изображения
X(z)
на
z-1
соответствует сдвиг дискретного сигнала на один шаг
влево, то есть, оператор z-1 можно трактовать как оператор
обратного сдвига. В результате получим:
1
m
Y ( z ) a0 a1z ... am z
;
1
n
X ( z ) b0 b1z ... bn z
(1.66)
216.
Y ( z ) b0 b1z ... bn z1
n
X ( z ) a0 a1z ... am z
1
m
;
b0 y n b1 y n 1 ... bn y 0
a0 x m a1 x m 1 ... am x 0 . (1.67)
КРУ
позволяет,
поле
очевидных
преобразований,
выразить выходной сигнал, в момент времени nΔt через
значения входного сигнала и значения выходного сигнала в
предыдущие моменты времени, то есть рекуррентно:
217.
b1bn
y n y n 1 ... y 0
b0
b0
a0
a1
am
x m x m 1 ...
x 0 .
b0
b0
b0
Далее возникает вопрос: как получить КРУ, если
степенные ряды в (1.65) бесконечны? Как получить по
исходным
данным
ДПФ
виде
конечной
дробно-
рациональной функции?
Надо отметить, что вопрос получения ДПФ вида (1.66) с
конечными многочленами числителя и знаменателя волнует
исследователей в течение длительного времени.
218.
Эйлерпредложил
заменить
производные
в
дифференциальном уравнении динамического объекта
конечными разностями – прямыми или обратными. Это
привело к получению ДПФ путем замены переменной s
преобразования Лапласа приближениями вида [10, 14]:
z 1
s
t ,
1 z
s
t
(1.68)
1
;
(1.68)
219.
Тастинпредложил
заменить
производную
конечной разностью второго порядка, что привело
к замене вида:
1
2 1 z
s
1
t 1 z
(1.69)
220.
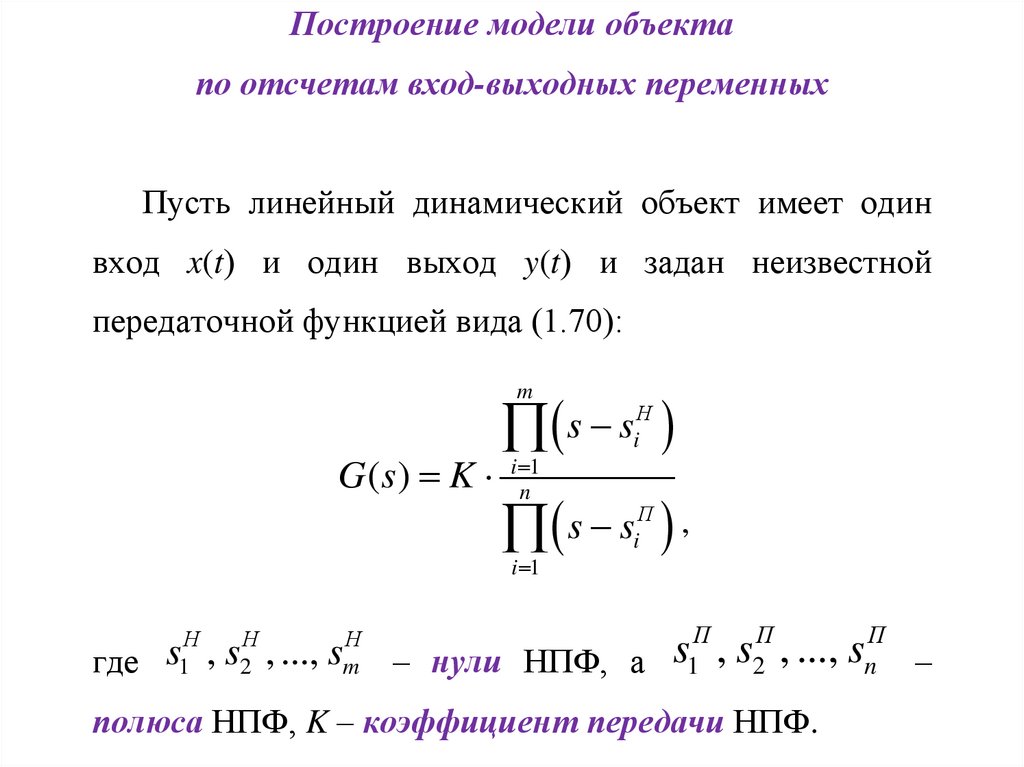
Смит предложил заменить все характеристические точкинепрерывной передаточной функции (НПФ) вида:
s s
m
G ( s) K i n1
н
i
s s ,
i 1
п
i
(1.70)
н
н
н
п
п
п
s
,
s
,
...,
s
s
,
s
,
...,
s
где 1 2
m – нули НПФ, а
1
2
n – полюса
НПФ, K – коэффициент передачи НПФ на такое же
количество дискретных полюсов и нулей ДПФ вида:
221.
z zm
н
i
G ( z ) k i n1
z z .
п
j
j 1
(1.71)
н
н
н
z
,
z
,
...,
z
где 1 2
m – ее нули (корни полинома числителя), а
z1п , z2п , ..., znп – ее полюса (корни полинома знаменателя).
Для замены предлагалось использовать
согласованного Z-преобразования:
z e
формулу
s t
.
(1.72)
222.
Вработах
сотрудников
кафедры
автоматизации
исследований и технической кибернетики (1992-2015 г.)
было показано, что данные подходы не позволяют
построить
динамического
дискретную
линейного
модель
непрерывного
объекта
без
потери
характеристических свойств. Так модели, построенные на
основе формул (1.68)-(1.69) не учитывают поведение
объекта в начале работы или в установившемся режиме,
модель (1.72) не учитывает появление дополнительных
нулей и полюсов ДПФ, что также ведет к расхождению
реальной и модельной переходной характеристики.
223.
В 1996 году профессором Карташовым В. Я. былпредложен подход для получения ДПФ полностью
сохраняющий свойства НПФ линейного динамического
объекта.
Основой
этого
способа
явился
предложенный
В. Висковатовым метод перехода от отношения двух
бесконечных степенных рядов к непрерывной дроби.
224.
a10 a11 x a12 xf ( x)
2
Пусть
a00 a01 x a02 x ... .
2
Тогда
1
f ( x)
a00 a00 a00 a01 x a02 x 2
2
a10 a10 a10 a11 x a12 x
a10
(a10a01 a00a11 ) (a10a20 a00a12 ) x
a00 x
a10 a11 x a12 x 2
225.
a10a20 a21 x a22 x 2
a00 x
a10 a11 x a12 x 2
a10
a20
a00 x
(a20 a11 a10 a21 ) (a20 a12 a10a22 ) x
a10 x
a20 a21 x a22 x 2
(1.73)
a10
a20 x
a30 x
a00 a10 a20 ...
226.
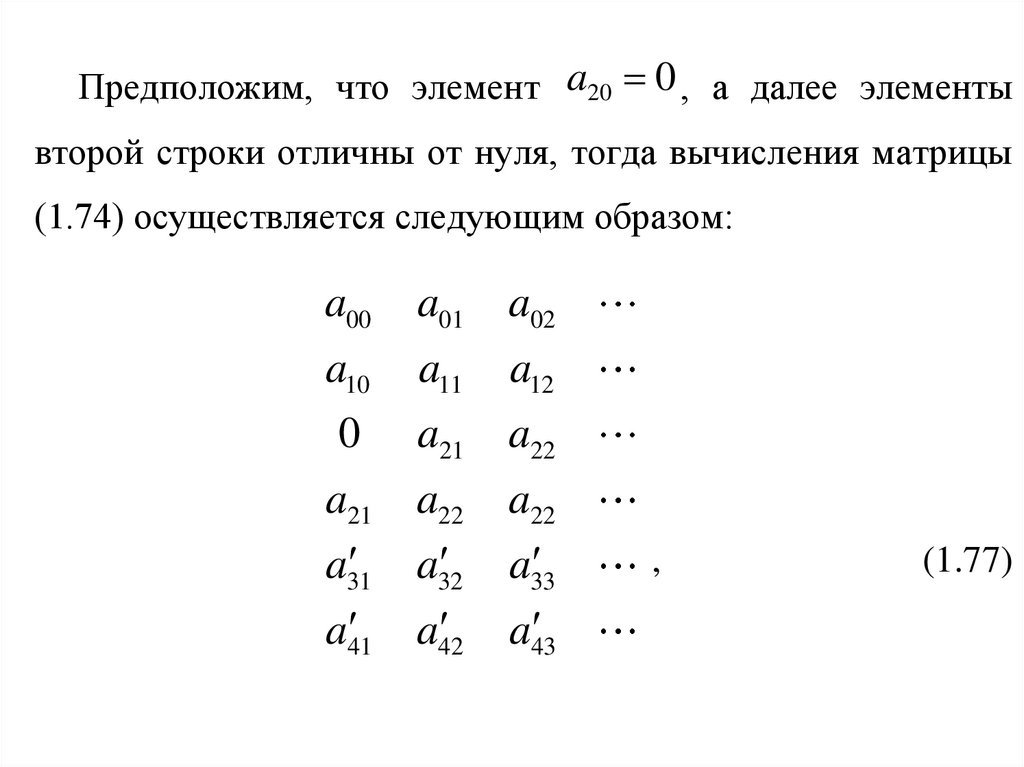
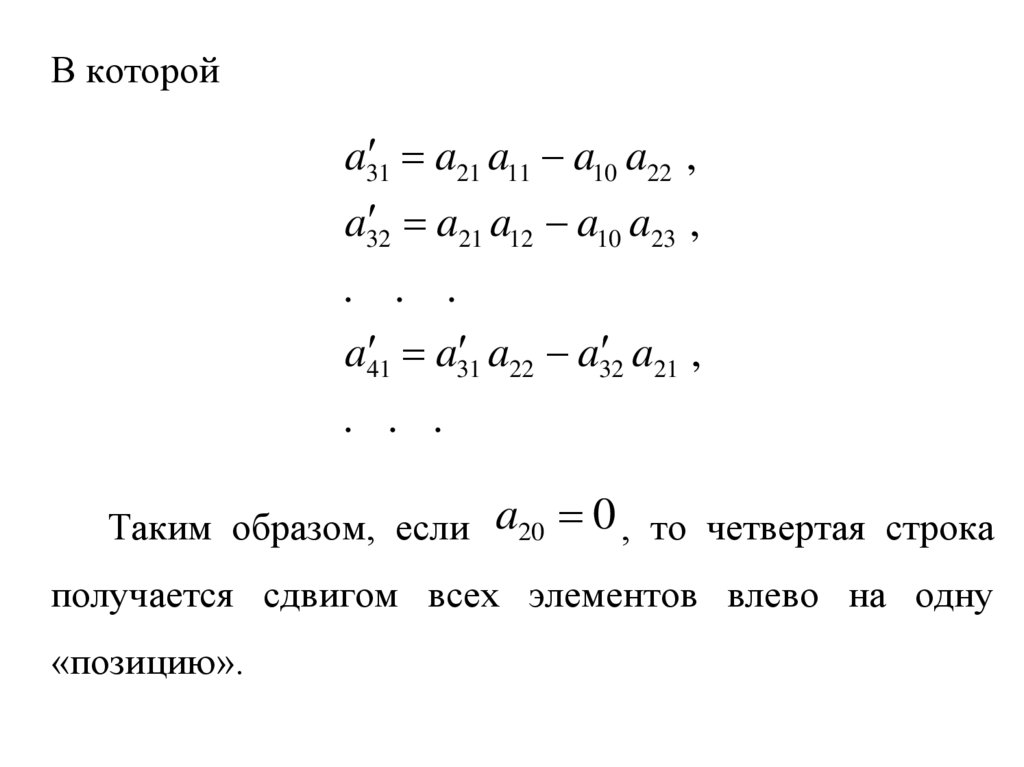
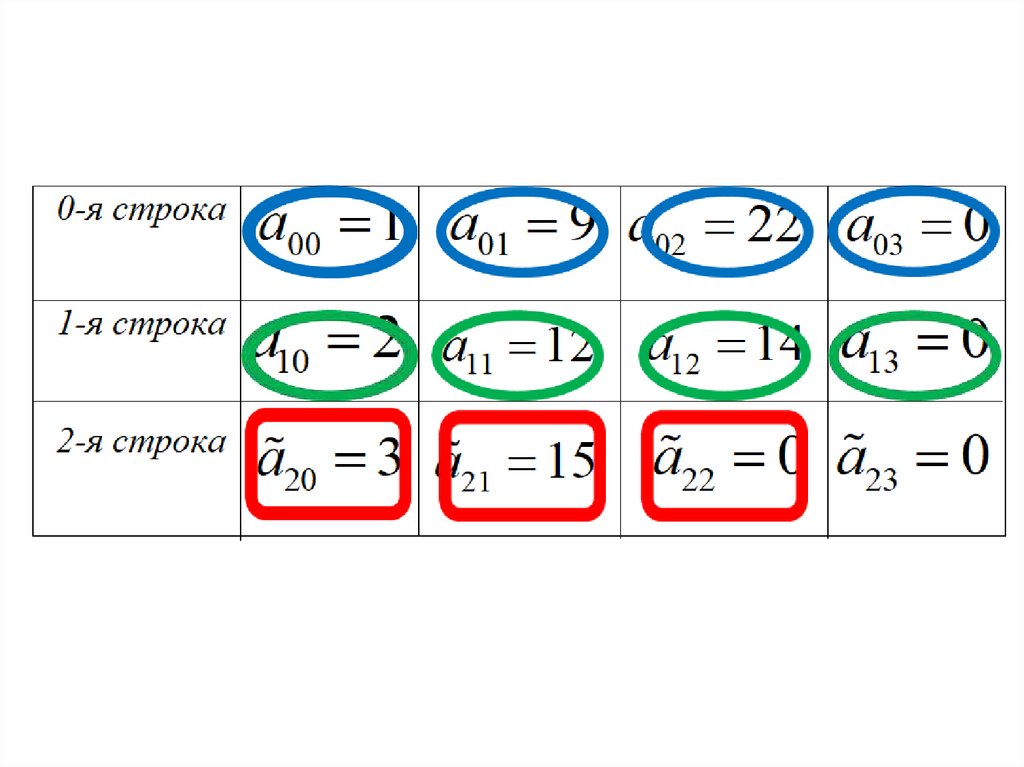
Вычисления удобно располагать по следующей схеме:a00
a10
a20
a30
Здесь
элементы
a01 a02
a11 a12
a21 a22
a31 a32
матрицы
(1.74)
(1.74)
рассчитываются
последовательно по следующему соотношению:
amn am 1,0 am 2,n 1 am 2,0 am 1,n 1
(1.75)
227.
Частные числители и знаменатели соответствующейнепрерывной дроби (1.73) определяются элементами
нулевого столбца матрицы (1.74):
a10
f x
a20 x
a00
a30 x
a10
a40 x
a20
a30
(1.76)
228.
Предположим, что элемент a20 0 , а далее элементывторой строки отличны от нуля, тогда вычисления матрицы
(1.74) осуществляется следующим образом:
a00
a10
0
a21
a31
a41
a01
a11
a21
a22
a32
a42
a02
a12
a22
a22
a33
a43
,
(1.77)
229.
В которойa21 a11 a10 a22 ,
a31
a21 a12 a10 a23 ,
a32
. . .
a31
a22 a32
a21 ,
a41
. . .
Таким образом, если a20 0 , то четвертая строка
получается сдвигом всех элементов влево на одну
«позицию».
230.
Тогдасоответствующая
непрерывная
дробь
принимает следующий вид с учетом сдвига на один
элемент в случае a20 0 :
x
x
a10
a21 x
a31
a41
f ( x)
a00 a10 a21 a31
2
(1.78)
Это правило справедливо для любой k-ой строки
231.
Карташовым В. Я.на
основе
эквивалентных
преобразований с непрерывными дробями был предложен
модифицированный метод, переводящий отношения двух
бесконечных степенных рядов в правильную С-дробь,
то
есть дробь, все частные знаменатели которой равны 1.
Построим аналогичную матрицу:
a00
a10
a20
a30
a01 a02
a11 a12
a21 a22
a31 a32
a03
a13
a23
a33
,
(1.79)
232.
am 2, n 1am 1,n 1
amn
am 2,0
am 1,0 ,
где m = 2, 3, 4, ... , а n =0, 1, 2, ... , считая, что
a0,n 1 a0,n 1 , a1,n 1 a1,n 1 .
(1.80)
233.
В результате первый столбец полученной таким образомматрицы (1.79) определяет правильную С-дробь:
a0
f x
a1 x
1
a2 x
,
1
a3 x
1
1
(1.81)
a10
a0 ; ai ai 1,0
в которой
в соответствии с матрицей
a00
(1.79).
234.
Пример. Дана дробно рациональная функция2 12 x 14 x
f x
1 9 x 22 x 2 .
2
1) Разложить ее в непрерывную дробь с помощью метода
Висковатова, свернуть дробь, пользуясь FR-алгоритмом.
2) Разложить
ее
в
непрерывную
дробь
с
помощью
модифицированного метода Висковатова (ММВ), свернуть
дробь, пользуясь ВR-алгоритмом.
235.
236.
237.
Для строки №3 воспользуемся формулой (1.75):a3n a20 a1,n 1 a10 a2,n 1
(1.84)
238.
239.
240.
241.
242.
Расчет закончен. По элементам нулевого столбца построимконечную непрерывную дробь по формуле (1.76):
2 /1
2
f x
6x
6x
1
1
12 x
12 x
2
2
144 x
144 x
6
6
12096 x
12 84 x
12
144
243.
22
6x
6x
1
1
2
12 x 12 84 x
144 x 1008 x
2
2
72 504 x 144 x
6 12 84 x 144 x
2
2
6x
6 x 1 5 x
1
1
2
2
2 x 14 x
2
1
5
x
2
x
14
x
2
1 5x
244.
22
2
2
6 x 30 x
3x 15 x
1
1
2
2
2 12 x 14 x
1 16 x 7 x
2 1 6 x 7 x
2
2 12 x 14 x
.
2
2
2
1 6 x 7 x 3x 15 x
1 9 x 22 x
2
245.
Осуществимрасчет
непрерывной
дроби
с
помощью
модифицированным методом В. Висковатова.
Аналогично формуле (1.82), элементы 0-ой и 1-ой строки
матрицы это коэффициенты знаменателя и числителя по
возрастанию степени переменной x.
246.
Для строки №2 воспользуемся формулой (1.80):a2 n
a0, n 1
a00
a1,n 1
a10 ,
(1.88)
247.
248.
Для расчета элементов строки №3 воспользуемся формулой (1.80):a3n
a1, n 1
a10
a2,n 1
.
a20
(1.89)
249.
250.
Расчет закончен. По элементам нулевого столбцапостроим конечную непрерывную дробь по формуле
(1.81):
2 /1
.
f x
3x
1
x
1
2 x
1
1 7x
251.
Согласно условию пункта 2, Расчет дробитребуется
провести
с
помощью
прямого
рекуррентного алгоритма (FR-алгоритма).
Воспользуемся формулами (1.58):
An bn An 1 an An 2
Bn bn Bn 1 an Bn 2 .
Здесь A0 b0 ; B0 1; A 1 1; B 1 0 .
252.
В нашем случае все частные знаменатели равны1, а частные числители:
a0 2, a1 3x, a2 x, a3 2 x, a4 7 x.
Тогда начальные условия имеют вид:
A0 1, B0 1; A 1 1; B 1 0.
253.
Рассчитаем первую подходящую дробь. Найдемее числитель A1 и знаменатель B1.
A1 b1 A0 a1 A 1 1 1 3x 1 1 3x;
B1 b1 B0 a1 B 1 1 1 3x 0 1.
Первая подходящая дробь равна:
A1 1 3x
V1
1 3x.
B1
1
254.
Рассчитаем вторую подходящую дробь:A2 b2 A1 a2 A0
1 1 3x x 1 1 3x x 1 4 x;
B2 b2 B1 a2 B0 1 1 x 1 1 x.
Вторая подходящая дробь имеет вид:
A2 1 4 x
V2
.
B2 1 x
255.
Рассчитаем третью подходящую дробь:A3 b3 A2 a3 A1 1 1 4 x 2 x 1 3x 1
1 4x 2x 6x 1 2x 6x ;
2
2
B3 b3 B2 a3 B1
1 1 x 2 x 1 1 x 2 x 1 x.
Третья подходящая дробь равна вид:
A3 1 2 x 6 x
V3
.
B3
1 x
2
256.
Далее аналогично.A4 b4 A3 a4 A2 1 2 2 x 2 x 2 2 2 x;
B4 b4 B3 a4 B2 1 1 4 x 2 x 1 3x 1 2 x 6 x .
2
A4
2 2x
V4
.
2
B4 1 2 x 6 x
257.
А5 b5 A4 a5 A3 1 2 2 x 7 x 2 2 x 2 12 x 14 x 2 ;B5 b5 B4 a5 B3 1 1 2 x 6 x 2 7 x 1 4 x 1 9 x 22 x 2 .
A5 2 12 x 14 x
V5
B5 1 9 x 22 x 2
2
(1.93)
258.
Расчеты закончены, так как использованы всечастные числители. Видим, что выражение (1.93)
совпадает с исходной функцией.
Надо заметить, что найденные в примере
подходящие дроби являются аппроксимациями
различной точности заданной функции.
Если бы ряды в числители и знаменатели
данной функции были бесконечны, то находя
последовательно подходящие дроби, мы получали
бы все более и более точное ее приближение.
259.
Лекция 12Построение непрерывной
передаточной функции по отсчетам
вход-выходных значений
характеристики объекта
259
260.
Построение модели объектапо отсчетам вход-выходных переменных
Пусть линейный динамический объект имеет один
вход x(t) и один выход y(t) и задан неизвестной
передаточной функцией вида (1.70):
Н
s
s
i
m
G ( s) K i n1
П
s
s
i ,
i 1
Н
1
Н
2
Н
m
где s , s , ..., s
– нули НПФ, а
П
1
П
2
П
n
s , s , ..., s
полюса НПФ, K – коэффициент передачи НПФ.
–
261.
Зададим шаг дискретизации t и измерим значениявходного и выходного сигнала в точках k t . Получим
последовательности значений xk = х(k∆t) и y k = у(k∆t).
Это позволит превратить информацию о поведении
объекта в отношение бесконечных степенных рядов
вида:
k
y
(
k
t
)
z
G ( z ) k 0
k
x
(
k
t
)
z
k 0
262.
y (0) y ( t ) z 1 y (2 t ) z 2 y (3 t ) z 3 ...x(0) x( t ) z 1 x(2 t ) z 2 x(3 t ) z 3 .. .
(1.94)
Чтобы получить дробно-рациональное выражение,
имеющее конечный порядок полиномов числителя и
знаменателя, применим модифицированный метод В.
Висковатова для преобразования отношения степенных
рядов в непрерывную дробь.
263.
В работе Петрикевич, Я. И. доказано, что матрица,построенная с помощью модифицированного метода
Висковатова, (здесь идентифицирующая матрица) для
линейного динамического объекта имеет строго
определенный номер нулевой строки, зависящий от
порядка этого объекта. Значит, искомая непрерывная
дробь будет конечной.
264.
Свернув полученную непрерывную дробь, получим ДПФН
z
z
i
m
G ( z ) k i n1
П
z
z
i ,
(1.95)
i 1
П
П
П
Н
Н
Н
z
,
z
,
...,
z
z
,
z
,
...,
z
где 1
2
n – ее полюса.
2
m – ее нули, а 1
При этом, как отмечалось в начале данной главы, количество и
величина характеристических точек (нулей и полюсов) модели
(1.95) в плоскости Z-преобразования определяется шагом
дискретизации
t ,
количеством
и
величиной
характеристических точек НПФ (2.1.4) в S-плоскости.
265.
Нули и полюса дискретной модели (1.95) однозначносоответствуют нулям и полюсам модели (1.70) по формулам
согласованного Z-преобразования:
z e
s t
(1.96)
и обратного Z-преобразования:
1
s
Ln z
t
.
(1.97)
266.
Здесь под обозначениемLn z
для комплексных чисел
понимается:
Ln z ln z i arg z .
(1.98)
При этом числа, лежащие в Z-плоскости на отрицательной
части действительной оси или равные 0, в S-плоскость
формулой
(1.97)
не
переводятся.
Будем
называть
что
для
дополнительными
и
считать,
характеристических
точек
дискретной
S-плоскости аналогов нет.
модели
их
таких
(1.96)
в
267.
Затем необходимо найти коэффициент передачи K для НПФ. Дляэтого представим полученную НПФ в виде:
Н
s
s
i
m
G ( s) K G М ( s) K i n1
s s ,
i 1
П
i
(1.98
Н
s
s
i
m
G М ( s ) i n1
П
s
s
i
i 1
искомая НПФ объекта, с точность до коэффициента передачи K.
268.
С помощью таблицы обратного преобразования Лапласа найдемМ
у
(t ) с точностью до
модельное значение выходного сигнала
коэффициента
передачи
K.
Воспользовавшись
исходными
М
y
(
n
t
)
K
y
(n t ) , n t –
данными, составим уравнение
любой момент времени, в который снята информация об объекте.
Лучше, если таких уравнений будет несколько, а найденные из них
оценки параметра K – усреднены.
269.
Замечание: В случае, когда на вход устойчивогообъекта идентификации подается единичное ступенчатое
воздействие, коэффициент передачи может быть найден с
помощью теоремы о конечном значении:
lim h t lim G s lim G z = K
t
s 0
z 1
(1.99)
270.
Проверим точность моделирования, сравнив результаты расчетадискретной
модели
по
полученному
конечно-разностному
уравнению (1.67) с исходными данными.
Пример. Даны отсчеты вход-выходных переменных линейного
динамического объекта.
х(0) 1; х(2) 1; х(4) 1; х(6) 1; х(8) 1; х(10) 1.
y(0) = 0;
y(2) = 0,774091;
y(4) = 1,997882; y(6) = 3,017634;
y(8) = 3,738225; y(10) = 4,212840.
271.
Так как ДПФ объекта имеет вид (1.94), а в нашем случае:0 0,774091 z 1 1,997882 z 2 3,017634 z 3 3,738225 z 4...
G( z )
1 1 z 1 1 z 2 1 z 3 1 z 4 1 z 5..
то воспользуемся модифицированным методом В. Висковатова для
преобразования данного отношения рядов в непрерывную дробь.
Построим идентифицирующую матрицу.
272.
11
1
1
1
0,774091 1,997882 3,017634 3,738225 4,212840
1,580941 2,898295 3,829183 4,442308
0,747668 1,476204 2,019269
0,141138 0,278663
0,000000 0,000000
273.
С учетом того, что в нулевой строке осуществлен сдвиг влево наодин элемент, обусловленный начальным значением y(0) = 0,
получим конечную правильную С-дробь:
1
z 0,774091
G( z)
1
1,580941 z
1
1
0,747668 z
.
1
1 0,141138 z 1
274.
Переходя к дробно-рациональному выражению, определимидентифицирующую функцию G(z) объекта соотношением:
0,774091 z 1 0,46951 z 2
G( z )
1 0,97441 z 1 0,22313 z 2 . (1.99)
Найдем характеристические точки построенной ДПФ (1.99).
2
z
Умножим числитель и знаменатель (1.99) на
, чтобы степени
переменной z стали неотрицательными. Получим:
0,774091 z 0, 46951
G( z) 2
z 0,97441 z 0, 22313 .
(1.100)
275.
Приравняв нулю полином числителя, найдем zН
.
0,774091 z 0,46951 0 ,
0,774091 z 0,46951 ,
0,46951
z
0,606531
.
0,774091
Н
Н
z
Так как
является отрицательным числом, то он не переводится
в S-плоскость, то есть является дополнительным.
276.
Приравняв нулю полином знаменателя, и найдем полюса.z 2 0,97441 z 0,22313 0 ,
0,97441 0,056954 0,97441 0,238651
z
0,367879
2
2
П
1
0,97441 0,056954 0,97441 0,238651
z
0,606531
2
2
П
2
277.
ПП
z
z
Переведем в S-плоскость 1 и 2 по формуле (1.97). Учтем,
что t =2.
s1
s2
П
П
1
1
П
ln z1 ln 0,367879 0,5
t
2
1
1
П
ln z2 ln 0,606531 0,25
t
2
278.
Перейдем к нахождению коэффициента передачи.Согласно формуле (1.98), искомая НПФ объекта имеет вид:
1
K
1
G( s) K
s 0,5 s 0,25 0,5 0,25 2s 1 4s 1
1
K
2s 1 4s 1
Тогда модель с точностью до коэффициента передачи:
279.
Тогда модель с точностью до коэффициента передачи:1
G (s)
2s 1 4s 1 .
М
Используя таблицу преобразования Лапласа (прил. 1), получим:
T1
y (t ) 1
e
T2 T1
М
t
2
t
T1
T2
e
T2 T1
2
4
1
e
e
4 2
4 2
1 e 0,5t 2e 0,25t
t
4
t
T2
280.
Воспользуемся исходными данными и составим уравнение длянахождения оценки параметра K:
y(t ) K y (t ) .
М
(1.101)
Подставим в обе части равенства (1.101) несколько значений t и
найдем коэффициент K.
y(2) 0,774091 K y М (t ) K 0,154818
0,774091
K
5,000000
;
0,154818
281.
y(4) 1,997882 K y М (t ) K 0,3995761,997882
K
5,000000
;
0,399576
y(6) 3,017634 K y М (t ) K 0,603527
3,017634
K
5,000000
.
0,603527
Очевидно, что K = 5.
282.
Другой способ нахождение коэффициента передачи –формула (1.99), которая является следствием теоремы о
конечном значении.
Возьмем найденную ДПФ (1.100) и подставим в ее в
формулу (1.99).
0,774091 z 1 0,46951 z 2
lim G z = lim
2
1
z 1 1 0,97441 z
z 1
0,22313 z
0,774091 0,46951
5
1 0,97441 0,22313
283.
Y ( z)G( z )
Так как
X ( z ) , то
Y ( z ) 0,774091 z 1 0,46951 z 2
X ( z ) 1 0,97441z 1 0,22313 z 2 ,
откуда, раскрыв пропорцию, получим:
Y ( z ) 1 0,97441 z 1 0,22313 z 2
X ( z ) 0,774091 z 1 0,46951 z 2
284.
илиY ( z ) 0,97441 Y ( z ) z 1 0,22313 Y ( z ) z 2
0,774091 X ( z ) z 1 0,46951 X ( z ) z 2 .
1
Обозначим y (n t ) y[n] . Далее, трактуя оператор z , как
оператор обратного сдвига, получим:
y[n] 0,97441 y[n 1] 0,22313 y[n 2]
0,774091 x[n 1] 0,46951 x[n 2].
Уединив y[ n ] , получим выражение для построения дискретной
модели объекта в виде решетчатой функции:
285.
y[n] 0,974410 y[n-1]-0,223130 y[n-2]0,774091 x[n-1] 0,469510 x[n-2]
Рассчитаем значения решетчатой функции на Exel:
y[0] 0,974410 y[-1]-0,223130 y[-2] 0,774091 x[-1]
0,469510 x[-2]
0,974410 0-0,223130 0 0,774091 0 0,469510 0 0
y[1] 0,974410 y[0]-0,223130 y[-1] 0,774091 x[0]
0,469510 x[-1]
0,974410 0-0,223130 0 0,774091 1 0,469510 0 0,774091
286.
y[2] 0,974410 y[1]-0,223130 y[0] 0,774091 x[1]0,469510 x[0] 0,974410 0,774091-
-0,223130 0 0,774091 1 0,469510 1 1,997882
y[3] 0,974410 y[2]-0,223130 y[1] 0,774091 x[2]
0,469510 x[1] 0,974410 1,997882-0,223130 0,774091 0,774091 1 0,469510 1 3,017634
y[4] 0,974410 y[3]-0,223130 y[2] 0,774091 x[3]
0,469510 x[2] 0,974410 3,017634-0,223130 1,997882 0,774091 1 0,469510 1 3,738225
287.
y[5] 0,974410 y[4]-0,223130 y[3] 0,774091 x[4]0,469510 x[5] 0,974410 3,738225-0,223130 3,017634 0,774091 1 0,469510 1 4,212840
Сравним измеренные значения выхода и значения
решетчатой функции.
288.
289.
Обычно,для
сравнения
используется
именно
абсолютная погрешность. Это связано с тем, что
истинные значения сигнала могут быть очень малы, и
деление на их величину приведет к резкому возрастанию
погрешности, хотя, на самом деле, истинный сигнал и его
аппроксимация будут отличаться незначительно.
290.
Иногда в качестве оценки точности построениядискретной модели используют отношение абсолютной
погрешности к модулю максимального значения сигнала.
Понятно, что при этом 0,01, имеет разный смысл для
сигналов, достигающих по амплитуде 10 и 1000.
Однако может оказаться, что результаты расчетов
конечно- разностного уравнения далеки от выходных
данных объекта. Или они совпадают с расчетной
точностью
в
начальных
отсчетах,
существенно расходиться далее.
и
начинают
291.
Это означает, что шаг дискретизации t был выбранневерно. Он не принадлежит интервалу допустимых
шагов дискретизации. В работе Гутовой С. Г показано,
что в таком случае необходимо произвести вариацию
шага дискретизации и повторить расчеты.
292.
При этом производить расчеты полностью не надо.Достаточно найти нули и полюса ДПФ (1.100), как корни
полинома
числителя
и
полином
знаменателя.
Осуществить перевод z-полюсов (нулей) в S-плоскость и
сравнить
с
найденными
плюсами
(нулями)
при
первоначальном шаге t . Затем, произвести очередную
вариацию шага дискретизации. Если s-полюса (нули)
отличаются при различных соседних t не более, чем на
заданную точность , значит, найден допустимый шаг,
обеспечивающий построение НПФ, учитывающей все
динамические свойства данного объекта.
293.
После этого необходимо закончить расчеты, то естьнайти коэффициент передачи K и построить конечноразностное уравнение.
Покажем, для примера, расчет дискретной модели того
же объекта, измерения вход-выходных сигналов которого
сделано
с
шагом
предыдущего.
дискретизации,
вдвое
меньшим
294.
Итак, пусть отсчеты входа и выхода объекта имеют вид:х(0) 1; х(1) 1; х(2) 1; х(3) 1; х(4) 1; х(5)
y(0) = 0; у(1) = 0,244645; y(2) =0,774091;
y(3) = 1,391985; y(4) = 1,997882; y(5) = 2,545377.
Построим идентифицирующую матрицу.
295.
11
1
1
1
0,244645 0,7740906 1,3919853 1,997882 2,545377
2,164132 -4,689806 -7,166438 -9,40435 -11,3347
0,997071 2,3783459 3,820886 5,166813
0,218271 -0,520648 -0,836437
0 2,664E-14
296.
С учетом того, что в нулевой строке осуществлен сдвигвлево на один элемент, обусловленный начальным
значением y(0) = 0, получим конечную правильную Сдробь:
1
z 0,244645
G (z)
2,164132 z 1
1
1
0,997071 z
1
1
1 0,218271 z
297.
Переходяк
дробно-рациональному
выражению,
определим идентифицирующую функцию G(z) объекта
соотношением:
1
2
0,244646 z 0,190530 z
G (z)
1 1,385331 z 1 0,472367 z 2 .
(1.102)
Найдем характеристические точки построенной ДПФ
298.
0,1905300,778801
z
.
0,244646
Н
Так как z
переводится
Н
является отрицательным числом, то он не
в
дополнительным.
S-плоскость,
то
есть
является
299.
П1
Переведем в S-плоскость z
s1
s2
П
П
и z
П
2 по формуле (1.97).
1
1
П
ln z1 ln 0,606531 0,5
t
1
1
1
П
ln z2 ln 0,788801 0,25
t
1
300.
Сравним значения полюсов НПФ, полученных сшагом t 2 и t 1.
Видим, что они с расчетной точностью не отличаются.
Значит, дискретная модель в виде конечно-разностного
уравнения, построенная как с шагом
t 2 , так и с
шагом t 1, является эквивалентной непрерывной
модели объекта.
301.
Пример 2Пусть непрерывная модель объекта задана
передаточной функцией вида:
G s
2
s 1 ,
На вход подается единичное ступенчатое воздействие
x t 1 t .
302.
Тогда изображение выходного сигнала примет вид:2
Y s
s 1 s .
Переходная характеристика выражается формулой:
y t 2 1 e
t
.
.
303.
304.
Тогда непрерывная дробь имеет вид:1
1,26424 z
G z
1 0,36788 z 1 ,
Нулей нет, полюс z 0.36788 .
п
Переведём полюс в S-плоскость по формуле:
П
Ln z
s
1.
t
П
305.
306.
Тогда1
0,7894 z
G z
1 ,
1 0,6065 z
нулей нет, полюс z
П
0 ,60653 , после перехода в S-
плоскость примет вид:
п
Ln z
s
1,000002
.
t
П
307.
S-полюса отличаются на величину, которой можнопренебречь, значит единственный полюс НПФ равен –1 и
G(s) можно представить в виде:
K
G (s)
s 1.
Найдём коэффициент K по теореме о конечном значении
1
1,26424 z
1,26424
lim G z = lim
2
1
z 1
z 1 1 0,36788 z
.
1 0,36788
308.
Таким образом, восстановленная НПФ равна:2
G s
s 1,
что совпадает с условием.
309.
Алгоритм получения непрерывной передаточнойфункции линейного динамического объекта
по отсчетам вход-выходных измерений
Приведем алгоритм получения НПФ линейного
динамического объекта по отсчетам вход-выходных
характеристик.
Пусть
известны
вход-выходные
линейного динамического объекта.
измерения
310.
1. Поместить значения входного сигнала в нулевуюстроку идентифицирующей матрицы.
2. Поместить значения выходного сигнала в первую
строку
идентифицирующей
матрицы.
Если
первое
значение (k первых значений) равно 0, осуществить сдвиг
первой строки на один столбец (на k столбцов) влево.
Сделать пометку о сдвиге в соответствующей строке.
3. Рассчитать остальные строки идентифицирующей
матрицы,
используя
ММВ
по
формулам
Остановить расчеты при появлении нулевой строки.
(1.80).
311.
4. Использовать не равные нулю значения нулевогостолбца
матрицы
для
составления
конечной
непрерывной дроби (НД) вида (1.81).
5. Свернуть
полученную
НД
в
дробно-
рациональное выражение используя FR- или BRалгоритм.
Получим
дискретную
передаточную
функцию (ДПФ).
6. Отыскать корни полинома числителя (нули) и
корни полинома знаменателя (полюса) ДПФ.
312.
7. Осуществить перевод найденных полюсов инулей в S-плоскость по формуле (1.97). Количество
нулей и полюсов НПФ соответствует количеству тех
нулей и полюсов ДПФ, которые не лежат на
отрицательной полуоси Z-плоскости.
8. Что бы убедится в правильности выбранного
шага дискретизации и выполнении условия SPидентифицируемости произвести вариацию шага
дискретизации: увеличить Δt в два раза, для чего
поместить в идентифицирующую матрицу каждое
второе измеренное значение.
313.
9. Осуществить повторный расчет матрицы, НД, ДПФ, еенулей и полюсов, перевод их в S-плоскость.
10. Если полученное прообразы в S-плоскости Z-особых
точек при новом шаге дискретизации остались прежними, то
шаг соответствует условию SP-идентифицируемости.
11. Если оказалось, что прообразы Z-нулей и полюсов в Sплоскости изменились, значит, шаг дискретизации слишком
велик. Тогда следует уменьшить его вдвое, и повторить
действия,
начиная
с
построения
идентифицирующей
матрицы. Для получения измерений, сделанных с меньшим
шагом, требуется обратиться за помощью к технологу.
314.
12. Используя информацию о нулях и полюсах НПФ составитьвыражение (1.70) с точностью до коэффициента передачи.
13. В случае, если объект идентификации устойчив, и на вход
единичное подавалось ступенчатое воздействие, то коэффициент
передачи K можно найти по теореме о конечном значении (1.99).
14. Если объект не устойчив, или x(t ) 1(t ) необходимо найти из
G(s) реакцию Y(s) объекта при данном X(s), получить оригинал
y м (t ) с точностью до K; рассчитать значение
y м (n t ) в
м
y
(n t )
n
t
некоторой точке
с точностью до K; приравнять
значению выхода, измеренного
полученного уравнения.
в этой точке и найти K из
315.
Y s 1 W раз s W раз s Y s ,Тогда передаточная функция замкнутой системы
имеет вид:
W раз s
Y s
W s
Y s 1 W раз s .
(2.5)
Подставим в (2.5) выражение для разомкнутой
системы (2.4), получим:
R s G s
W s
1 R s G s
(2.6).