




 industry
industrySimilar presentations:



")






Глобальные системы позиционирования
1. ГЛОБАЛЬНЫЕ СИСТЕМЫ ПОЗИЦИОНИРОВАНИЯ
2. Геодезические приборы, созданные к настоящему времени, достигли высокого совершенства за счет удачных технических решений и
методов выполнения измерений.Однако точность геодезических измерений,
выполняемых на земной поверхности
традиционными методами с использованием
оптического диапазона электромагнитных
волн, ограничена постоянно меняющимися
параметрами приземных слоев атмосферы.
3.
• Особенностью GPS является уход оттрадиционных угловых измерений,
кроме того, для геодезических
измерений используются
пространственные положения
искусственных спутников Земли.
4. Известны два направления развития дальномерных систем
• 1. Методом координатных измерений сиспользованием одностороннего
прохождения информационных
сигналов от спутника до приемника на
земной поверхности. При этом
расстояние от спутника до приемника
вычисляют по формуле:
• L = vt
5.
• где v - скорость распространения волн ввакууме (влияние атмосферы
учитывается введением
соответствующей поправки); t - время
прохождения сигналом расстояния
между спутником и земной
поверхностью.
6.
• Преимущества одностороннего метода:возможность измерения от одного
передающего устройства,
установленного на спутнике, до
неограниченного количества
приемников на Земле, отсутствие
радиопередатчиков на Земле.
Недостаток: необходимость строгого
учета поправок, обусловленных
несинхронностью работы часов на
Земле и на спутнике.
7.
• 2. Методом двухстороннего измерениярасстояний (измерительные сигналы
проходят измеряемое расстояние
дважды). При этом расстояние от
приемника до спутника и обратно
• L = vt/2
8.
• Преимущества метода: время излучения иприема информационного сигнала
отсчитывают по одним и тем же часам,
смещение показаний часов относительно
эталонного времени не сказывается на
точности измерений, так как при вычислении
разности времени прохождения сигнала до
спутника и обратно это смещение
исключается.
9.
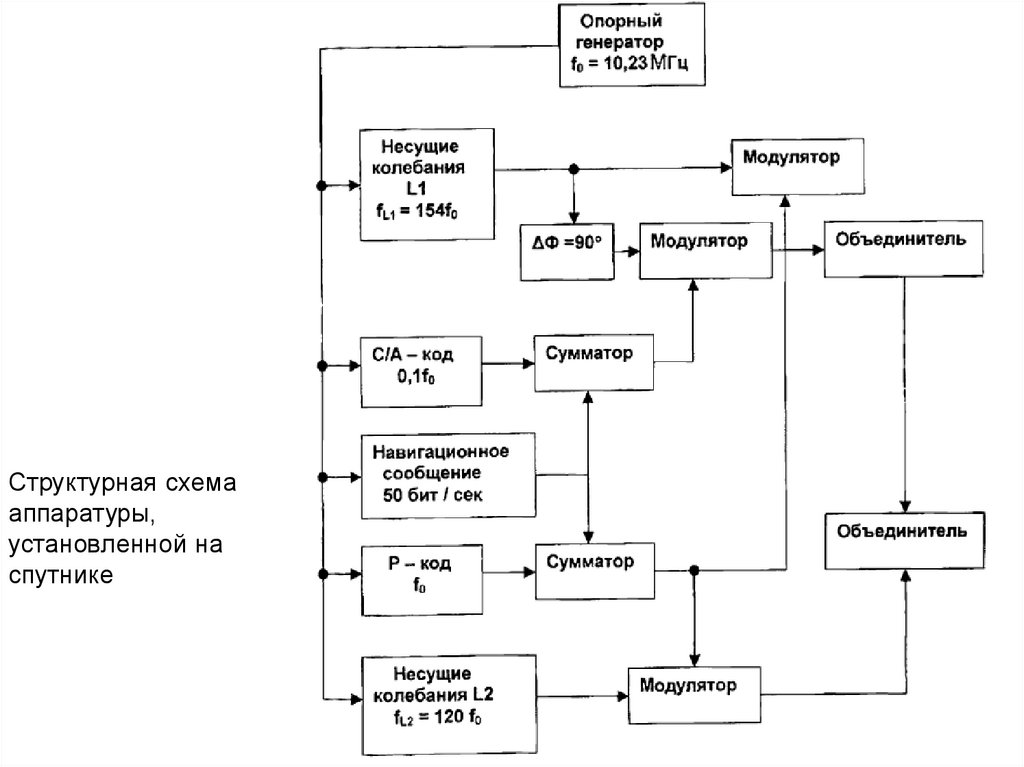
Структурная схемааппаратуры,
установленной на
спутнике
10.
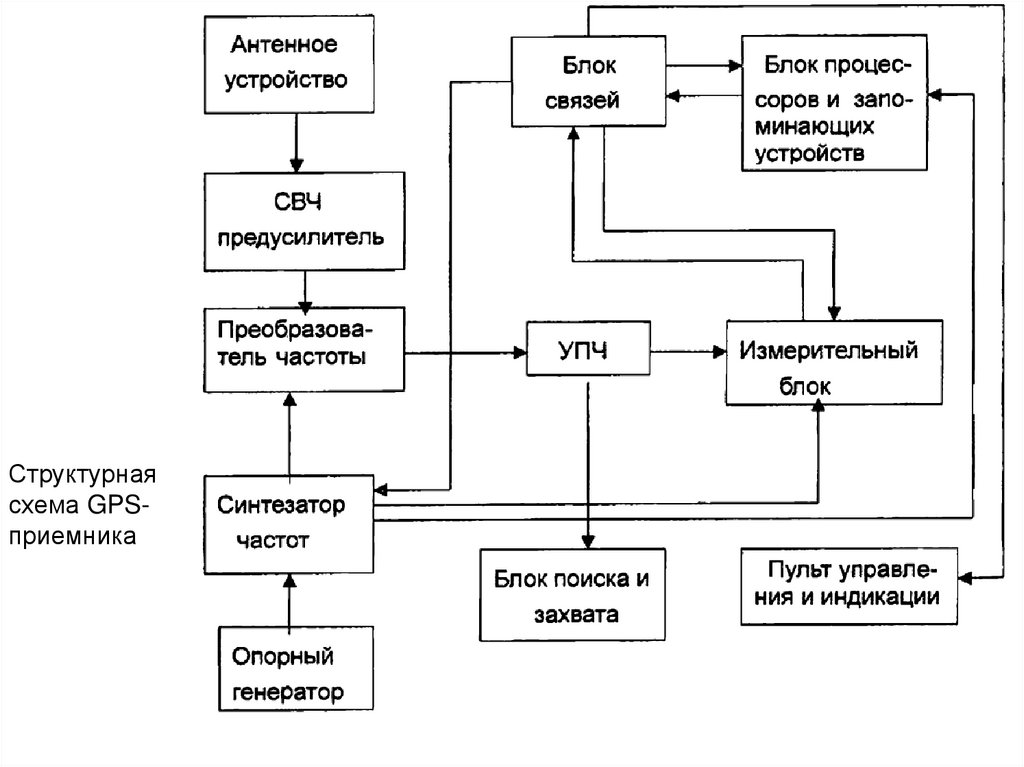
Структурнаясхема GPSприемника
11.
• Основное усиление принимаемых сигналовосуществляется усилителем промежуточной
частоты (УПЧ), подключенным к выходу
преобразователя частоты. С УПЧ связаны
блоки поиска и захвата и измерительный.
После завершения кодовокорреляционными методами поиска
спутника происходит захват его сигналов,
позволяющий производить отслеживание
соответствующих сигналов на протяжении
всего сеанса наблюдений за данным
спутником.
12.
• В измерительном блоке производится разделениепринимаемых фазомодулированных колебаний на
кодовые и гармонические сигналы, кроме того,
отделяются сигналы навигационного сообщения
спутника. Кодовые и гармонические сигналы
используются для вычисления расстояний до
спутников, по ним вычисляются предварительные
значения координат, различного рода поправки и,
в случае необходимости. вектор скорости
перемещения объекта с приемником излучения.
Кроме того, в приемном устройстве
осуществляется предварительное сглаживание и
группировка фазовых измерений и передача их в
запоминающее устройство
13.
Схема расположения оборудования GPS-приемника на штативе на примере "Leica"типа SR530
14.
• 1 - GPS-антенна; 2 - переходникдержатель; 3 - подставка (трегер); 4 штатив; 5 - устройство дляизмерения высоты приемника от
опорной точки; 6 – антенный кабель;
7 - две батареи питания; 8 - GPSприемник SR530; 9 - терминал ТР500
(при необходимости); 10 - PC Card
(флешкарта); 11 транспортировочный чемодан