

 electronics
electronicsSimilar presentations:










Механические характеристики элементов привода
1.
Выполнил студент группы 3-30Моисеев И. С.
2.
Привод – совокупность из первичного преобразователя энергии,двигателя, системы управления параметрами механического
движения и рабочих органов машины.
Основная функция привода – формирование требуемых параметров
и качества движения рабочего органа установки.
3.
Рассмотрим характеристики рабочих органов и кинематических передач,а так же их влияние на свойства всей системы управления рабочей машиной.
Механическая часть привода состоит из:
1. Движущая часть двигателя,
2. Передаточное устройство,
3. Рабочий орган.
4.
Рисунок 1. Механические характеристики рабочих органов5.
Зависимость 1 на рисунке 1 характерна для подъемных устройств (лебедок, подъемныхкранов, механизмов перемещения электродов и тд). Момент Mc (или усилие Fc), создаваемый
такими механизмами, не зависит от скорости и не меняет знак при изменении скорости. В
литературе получил название – активный. Что обусловлено природой его создания - силой
тяжести вертикально перемещаемого груза. Математическая зависимость 1 выражается как
Mc = MА.
Характеристика 2 на рисунке 1 определяет вязкое трение, возникающее в механизмах,
содержащих смазываемые жидкости (редукторы, направляющие механизмов).
Зависимость 2 – линейная и определяется как Mc =cω, где c - коэффициент
пропорциональности (коэффициент вязкого трения).
Квадратичная зависимость 3, определяется выражением Mc =cω2, характерна для
вентиляторов, компрессоров и насосов.
Зависимость 4 характеризует момент сухого трения, (или силу трения). Который получил
название реактивный, поскольку всегда действует против движения и изменяет знак при
изменении направления движения. Момент трения характеризуется нелинейной
зависимостью и определяется выражением Mc = Mо sign ω, где Mо – значение момента сухого
трения при ω =0, sign ω – знаковая (сигнум функция) показывает изменение знака момента
сопротивления при изменении знака скорости.
6.
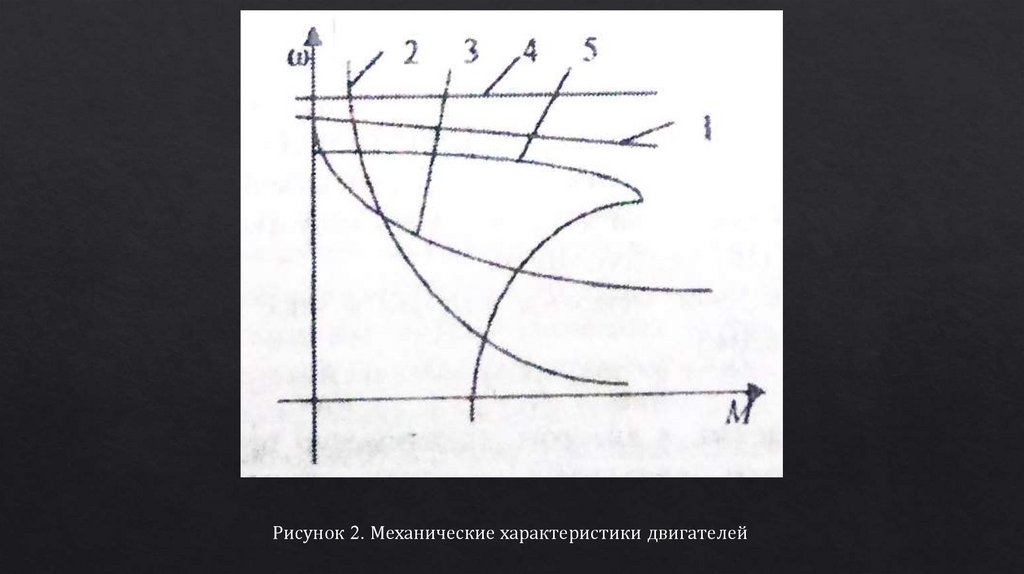
Рисунок 2. Механические характеристики двигателей7.
На рисунке 2 показаны естественные механические характеристики некоторых двигателей, то естьхарактеристики, полученные при нормальных и неизменных параметрах питания. Основным
параметром является жесткость ß, которая определяется как производная момента по скорости, то есть
ß = dM/dω.
Линейная зависимость 1 на рисунке 2 определяет механическую характеристику двигателя постоянного
тока независимого возбуждения. Она имеет наклон к оси момента и при ω=0 характеризуется
моментом КЗ (Mкз). Жесткость характеристики двигателей постоянного тока независимого возбуждения
ß = conts < 0.
Нелинейную зависимость 2 имеет двигатель постоянного тока последовательного возбуждения.
Особенностью является отсутствие скорости ХХ (при М стремящемся к 0; ω стремящемся к ∞). При ω = 0
двигатель развивает момент Mкз. Жесткость характеристики двигателя последовательного возбуждения
ß = var < 0 .
Гидравлический двигатель имеет близкую к кривой 2 механическую характеристику (см зависимость 3
на рис 2).
Для унификации механической характеристики электродвигателя представлена на рисунке 2 в
координатах ω и М, то есть применительно к вращательному, а не поступательному движению.
Жесткость характеристики гидродвигателя ß = var < 0.
Синхронный двигатель (4 на рисунке 2) имеет абсолютно жесткую характеристику (ß =∞), то есть
скорость не меняется при изменении момента нагрузки от 0 до максимального значения.
8.
JПРk = Jk / ik2JПРi = mi / ri2