


 physics
physicsSimilar presentations:

. Лекция 6.9")


")




")
Траекторные измерения
1. Траекторные измерения
12.
1 Фотограмметрия2 Оптические системы
3 Комплексная обработка информации
2
3.
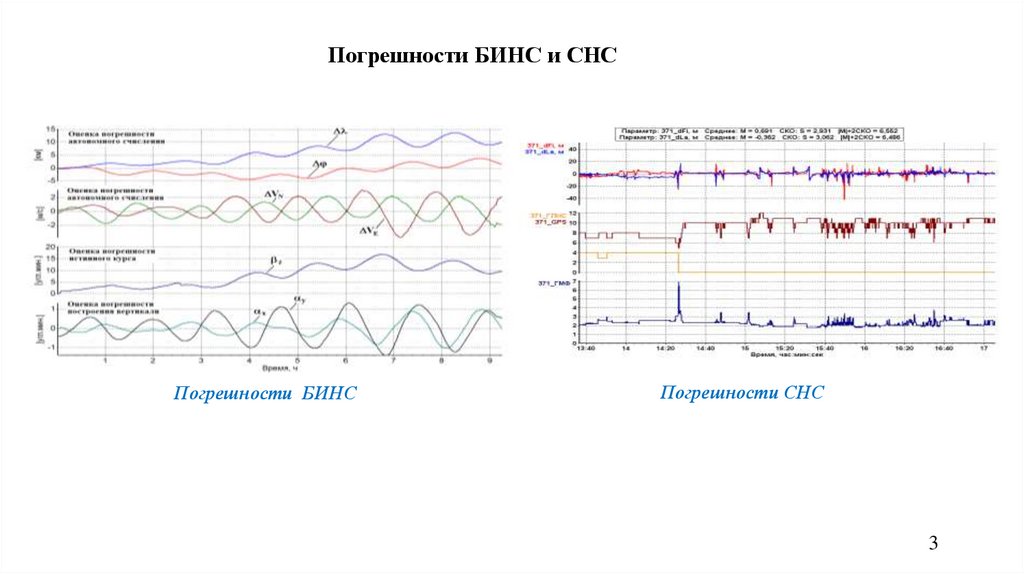
Погрешности БИНС и СНСПогрешности БИНС
Погрешности СНС
3
4.
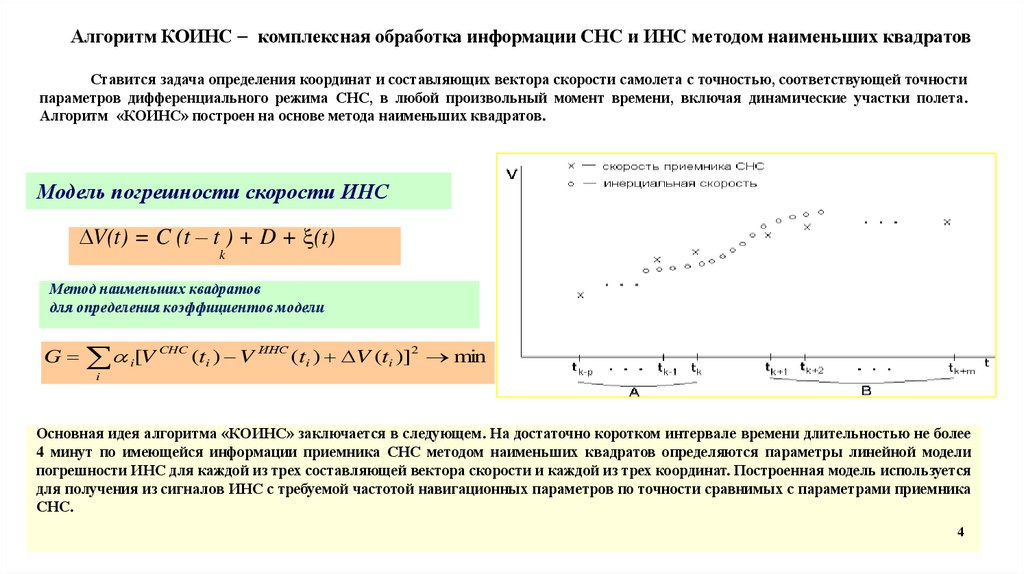
Алгоритм КОИНС комплексная обработка информации СНС и ИНС методом наименьших квадратовСтавится задача определения координат и составляющих вектора скорости самолета с точностью, соответствующей точности
параметров дифференциального режима СНС, в любой произвольный момент времени, включая динамические участки полета.
Алгоритм «КОИНС» построен на основе метода наименьших квадратов.
Модель погрешности скорости ИНС
V(t) = C (t – t ) + D + (t)
k
Метод наименьших квадратов
для определения коэффициентов модели
G i[V CHC (ti ) V ИНС (ti ) V (ti )]2 min
i
Основная идея алгоритма «КОИНС» заключается в следующем. На достаточно коротком интервале времени длительностью не более
4 минут по имеющейся информации приемника СНС методом наименьших квадратов определяются параметры линейной модели
погрешности ИНС для каждой из трех составляющей вектора скорости и каждой из трех координат. Построенная модель используется
для получения из сигналов ИНС с требуемой частотой навигационных параметров по точности сравнимых с параметрами приемника
СНС.
4
5.
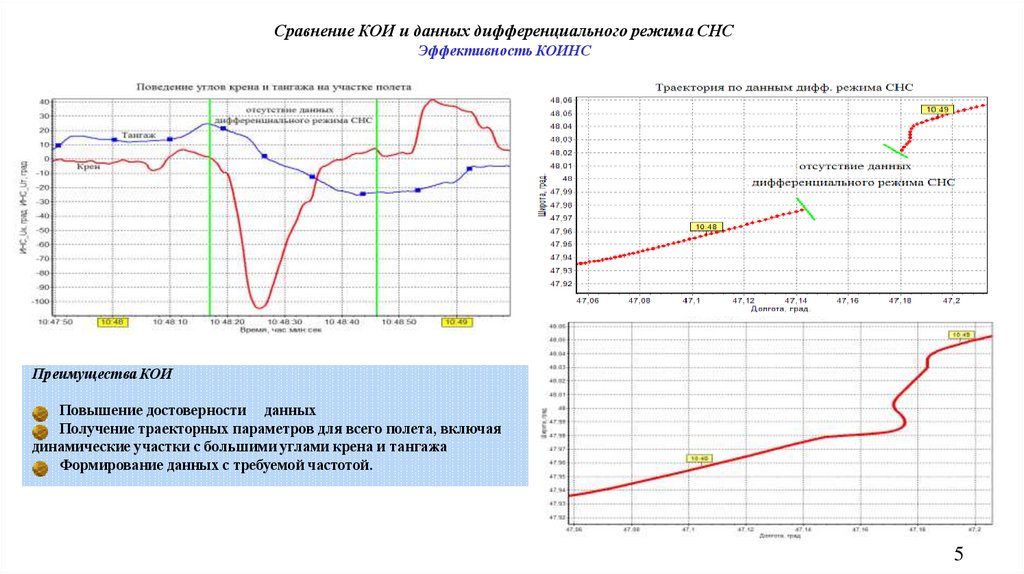
Сравнение КОИ и данных дифференциального режима СНСЭффективность КОИНС
Преимущества КОИ
Повышение достоверности данных
Получение траекторных параметров для всего полета, включая
динамические участки с большими углами крена и тангажа
Формирование данных с требуемой частотой.
5
6.
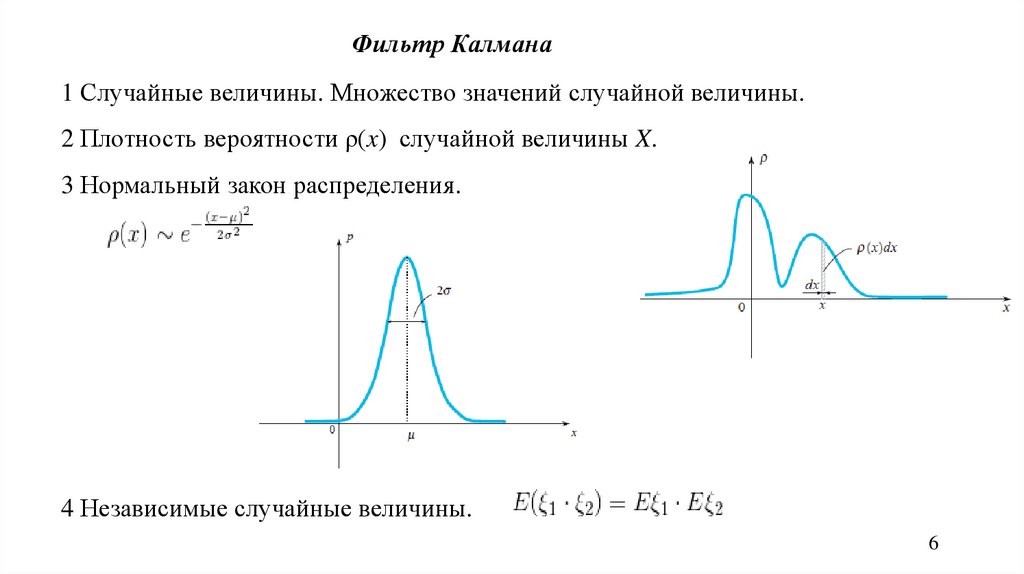
Фильтр Калмана1 Случайные величины. Множество значений случайной величины.
2 Плотность вероятности ρ(x) случайной величины X.
3 Нормальный закон распределения.
4 Независимые случайные величины.
6
7.
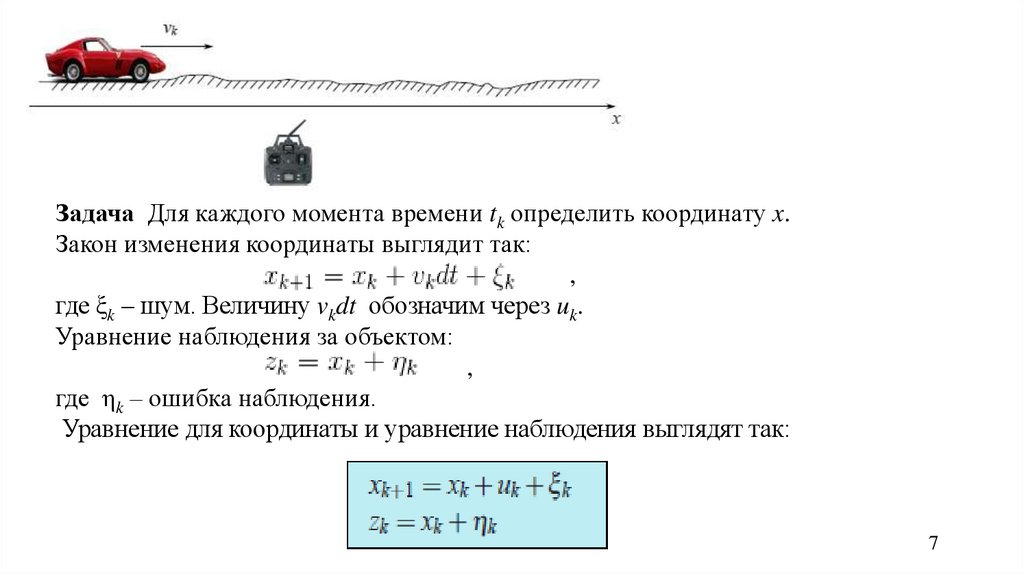
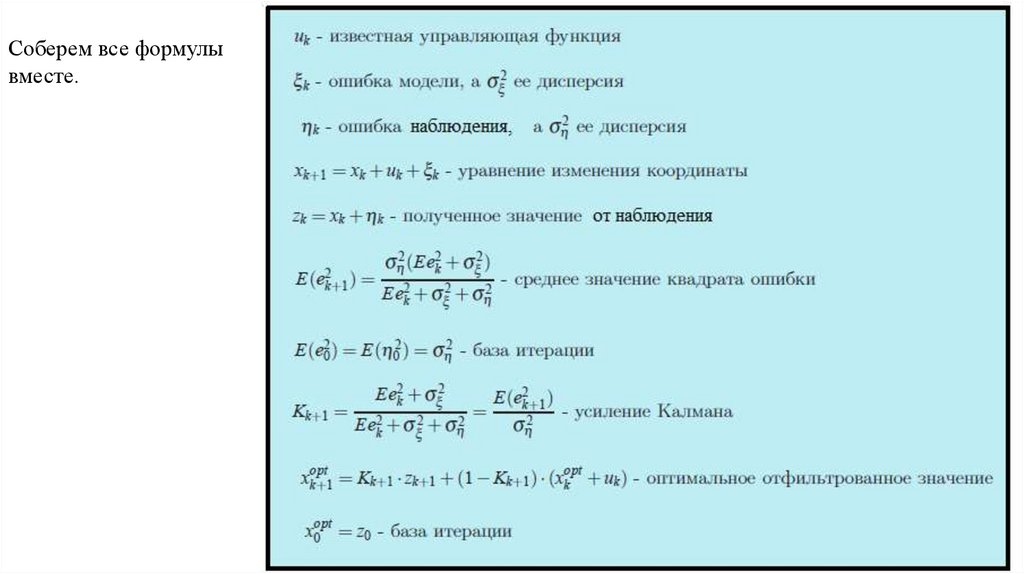
Задача Для каждого момента времени tk определить координату x.Закон изменения координаты выглядит так:
,
где ξk – шум. Величину vkdt обозначим через uk.
Уравнение наблюдения за объектом:
,
где ηk – ошибка наблюдения.
Уравнение для координаты и уравнение наблюдения выглядят так:
7
8.
Предположения1
uk – известная величина, которая контролирует эволюцию системы.
2
Ошибка модели ξk и ошибка наблюдения ηk – случайные величины, их законы
распределения не зависят от времени tk.
3 Средние значения ошибок равны нулю.
4
Законы распределения случайных величин ξk и ηk могут быть нам и не известны,
но известны их дисперсии
и
.
5
Предполагается, что все случайные ошибки независимы между собой.
8
9.
Алгоритм КалманаРассуждаем по индукции. Пусть на k-ом уже найдены отфильтрованное значение
,
которое хорошо приближает действительную координату xk объекта.
Из уравнения движения
можно предположить, что на (k+1)-ом шаге
действительную координату xk+1 близка к
. С другой стороны, на (k+1)-ом
шаге имеется неточное наблюдение zk+1 .
Идея Калмана – получить наилучшее приближение к действительной координате xk+1.
Коэффициент K называют коэффициентом Калмана, он зависит от шага итерации k+1.
Для нахождения коэффициента Калмана K следует минимизировать ошибку
9
10.
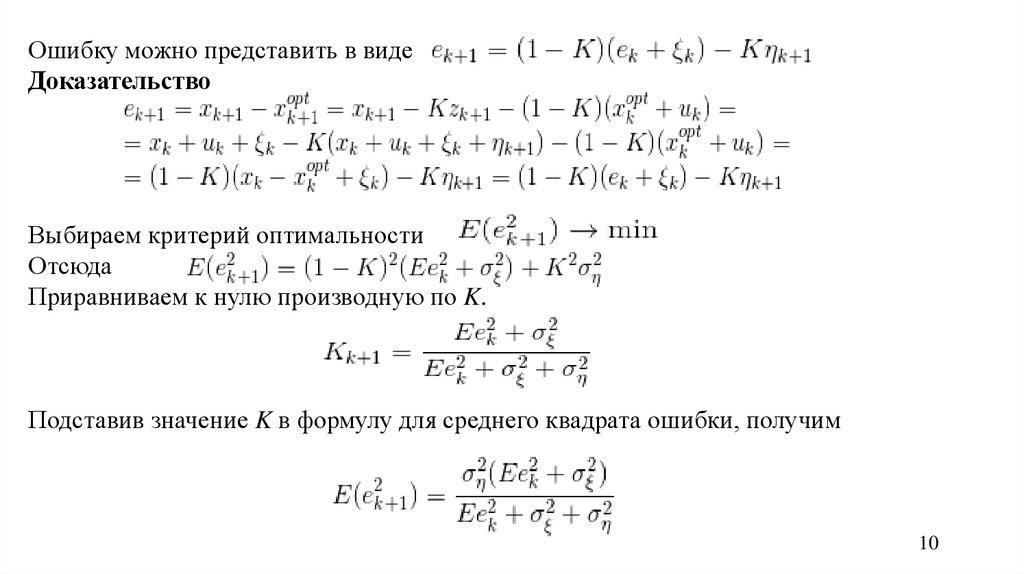
Ошибку можно представить в видеДоказательство
Выбираем критерий оптимальности
Отсюда
Приравниваем к нулю производную по K.
Подставив значение K в формулу для среднего квадрата ошибки, получим
10
11.
Соберем все формулывместе.
11
12.
Программный комплекс оптимальной обработки «Эталон»Направления применения алгоритмов КОИ
Обеспечение эталонных траекторных измерений при летных испытаниях ЛА и БО.
Использование ПК «Эталон» и «Коинс».
2. Анализ
характеристик инерциальных и радионавигационных систем по
материалам летных испытаний:
• в темпе полета;
• в послеполетной обработке.
Использование ПК «Эталон»
3. Реализация в вычислителях пилотажно – навигационных комплексов ЛА:
• на основе алгоритма КОИ с использованием фильтра Калмана;
• на основе алгоритма КОИ с использованием метода наименьших квадратов.
На основе ПК «Эталон» и «Коинс».
12
13.
Семейство программных комплексов «Эталон»ПК разработки АО «ЛИИ им. М.М. Громова»
ПМО обработки и анализа материалов испытаний БИНС
Программный комплекс «Пересчет» – пересчет параметров бортового оборудования (БИНС, СНС и др.) в
различные системы координат ЛА.
Программный
комплекс «Анализ» – экспресс–оценка функционирования, оценка точностных и
статистических характеристик погрешностей БИНС.
Программные комплексы «Эталон», «Эталон-XXI» и «Эталон-МК» – оптимальная обработка
информации с разделением суммарных ошибок ИНС/БИНС на составляющие и оценкой
инструментальных погрешностей базовых элементов, вычисление эталонных значений параметров:
─ ПК «Эталон» - исходный вариант (1987г.);
─ ПК «Эталон-XXI» - разработан автором (2008г.), модернизация ПК «Эталон», предназначен для
обеспечения испытаний навигационных систем современных и перспективных ЛА;
─ ПК «Эталон-МК» - (2014г.) модернизация ПК «Эталон» с применением алгоритмов, учитывающих
неортогональности осей приборного трехгранника БИНС, предназначен для обеспечения
испытаний маневренных ЛА.
13
14.
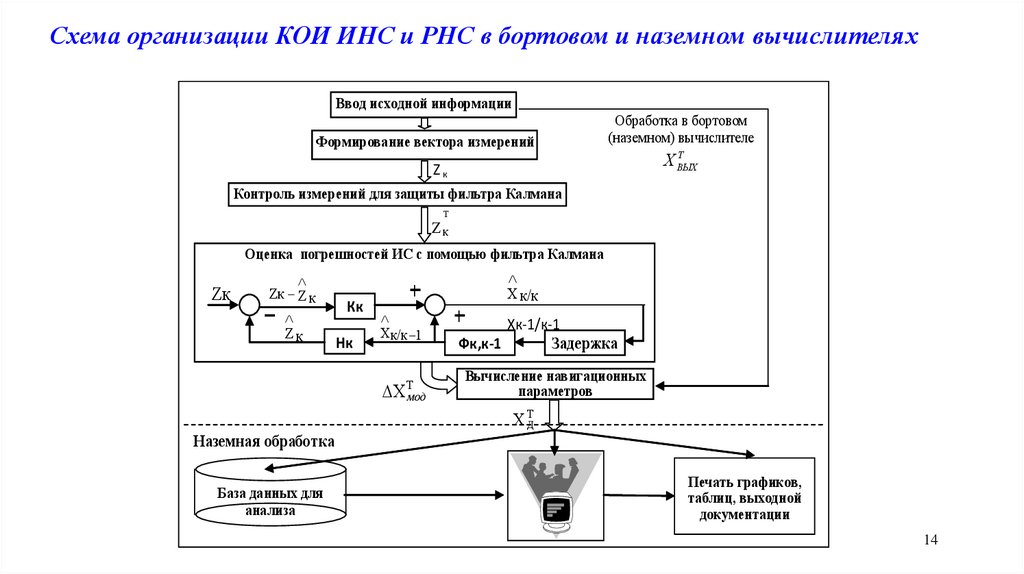
Схема организации КОИ ИНС и РНС в бортовом и наземном вычислителяхВвод исходной информации
Формирование вектора измерений
Обработка в бортовом
(наземном) вычислителе
Zк
Т
Х ВЫХ
Контроль измерений для защиты фильтра Калмана
Т
Zк
Оценка погрешностей ИС с помощью фильтра Калмана
Zк
Zк Z к
Zк
Кк
Нк
Х к/к
Х к/к 1
Х Тмод
Фк,к-1
Хк-1/к-1
Задержка
Вычисление навигационных
параметров
Х ТД
Наземная обработка
База данных для
анализа
Печать графиков,
таблиц, выходной
документации
14
15.
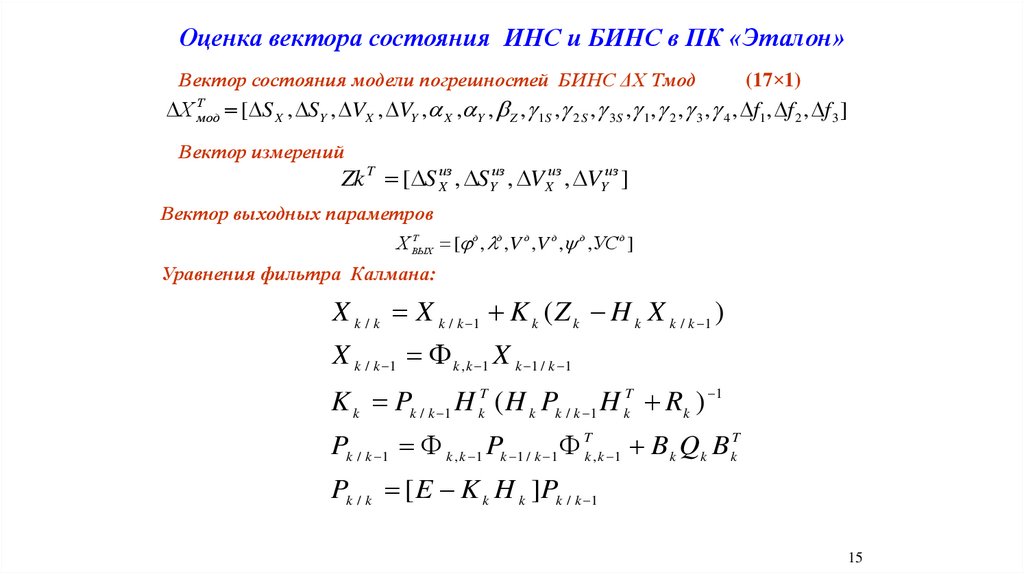
Оценка вектора состояния ИНС и БИНС в ПК «Эталон»Вектор состояния модели погрешностей БИНС ΔХ Тмод
Х
Т
м од
(17×1)
[ S X , SY , VX , VY , X , Y , Z , 1S , 2 S , 3S , 1 , 2 , 3 , 4 , f1 , f 2 , f 3 ]
Вектор измерений
Zk T [ S Xиз , SYиз , V Xиз , VYиз ]
Вектор выходных параметров
Т
Х ВЫХ
[ д , д ,V д ,V д , д ,УС д ]
Уравнения фильтра Калмана:
X k / k X k / k 1 K k ( Z k H k X k / k 1 )
X k / k 1 k , k 1 X k 1 / k 1
K k Pk / k 1 H kT ( H k Pk / k 1 H kT Rk ) 1
Pk / k 1 k , k 1 Pk 1 / k 1 Tk , k 1 B k Q k B kT
Pk / k [ E K k H k ]Pk / k 1
15
16.
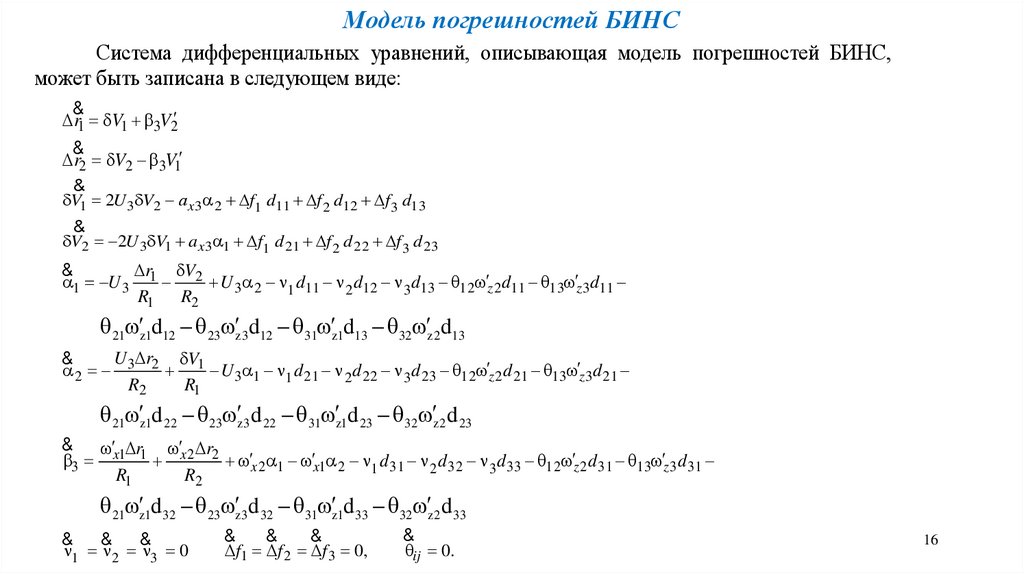
Модель погрешностей БИНССистема дифференциальных уравнений, описывающая модель погрешностей БИНС,
может быть записана в следующем виде:
&
r1 V1 3V2
&
r2 V2 3V1
&
V1 2U 3 V2 а x3 2 f1 d11 f 2 d12 f 3 d13
&
V2 2U 3 V1 a x3 1 f1 d 21 f 2 d 22 f 3 d 23
r V
&
1 U 3 1 2 U 3 2 1 d11 2 d12 3d13 12 z 2 d11 13 z 3d11
R1 R2
21 z1d12 23 z3d12 31 z1d13 32 z 2 d13
U r V
&
2 3 2 1 U 3 1 1 d 21 2 d 22 3 d 23 12 z 2 d 21 13 z 3d 21
R2
R1
21 z1d 22 23 z3d 22 31 z1d 23 32 z 2 d 23
& x1 r1 x 2 r2
3
x 2 1 x1 2 1 d 31 2 d 32 3 d 33 12 z 2 d 31 13 z 3 d 31
R1
R2
21 z1d 32 23 z3d 32 31 z1d 33 32 z 2 d 33
&
&
&
1 2 3 0
&
&
&
f1 f 2 f 3 0,
&
ij 0.
16
17.
Здесь: R , R – радиусы кривизны сечений земного эллипсоида по осям расчетной1 2
гироплатформы:
R =a/(1-0,5℮2sin2φ+℮2cos2φcos 2ε-H/a)
1
R =a/(1-0,5℮2sin2 φ+℮2 cos2 φsin2 ε-H/a)
2
d – элементы матрицы направляющих косинусов координатного преобразования систем
ij
координат, связанных с осями приборного трехгранника БИНС и моделируемой
гироплатформы, взаимное положение которых определяется углами крена , тангажа самолета
и гироскопического курса . Гироскопический курс отсчитывается от первой оси расчетной
г
платформы по часовой стрелке.
17