
 и техническими (автомат) системами")
















 physics
physics electronics
electronicsSimilar presentations:


")




, сенсорные устройства и датчики")


Измерение физических величин. Датчики (глава 2)
1.
ФГБОУ ВО УГНТУКафедра автоматизации , телекоммуникации и метрологии
ИЗМЕРЕНИЕ ФИЗИЧЕСКИХ
ВЕЛИЧИН.
Глава 2 ДАТЧИКИ
Светлакова Светлана Валерьевна
доцент, 1-255
2. Содержание
22. 1 Основные сведения
2. 2 Характеристики
Аналогия между биологическими
(человек) и техническими (автомат)
системами
Терминология
Структура датчика
Классификация датчиков
Требования, предъявляемые
к датчикам
Распределение датчиков по частоте
применения
Применение датчиков
Передаточная функция
Чувствительность
Калибровка
Точность и погрешность
Нелинейность
Гистерезис
Воспроизводимость
Мертвая зона
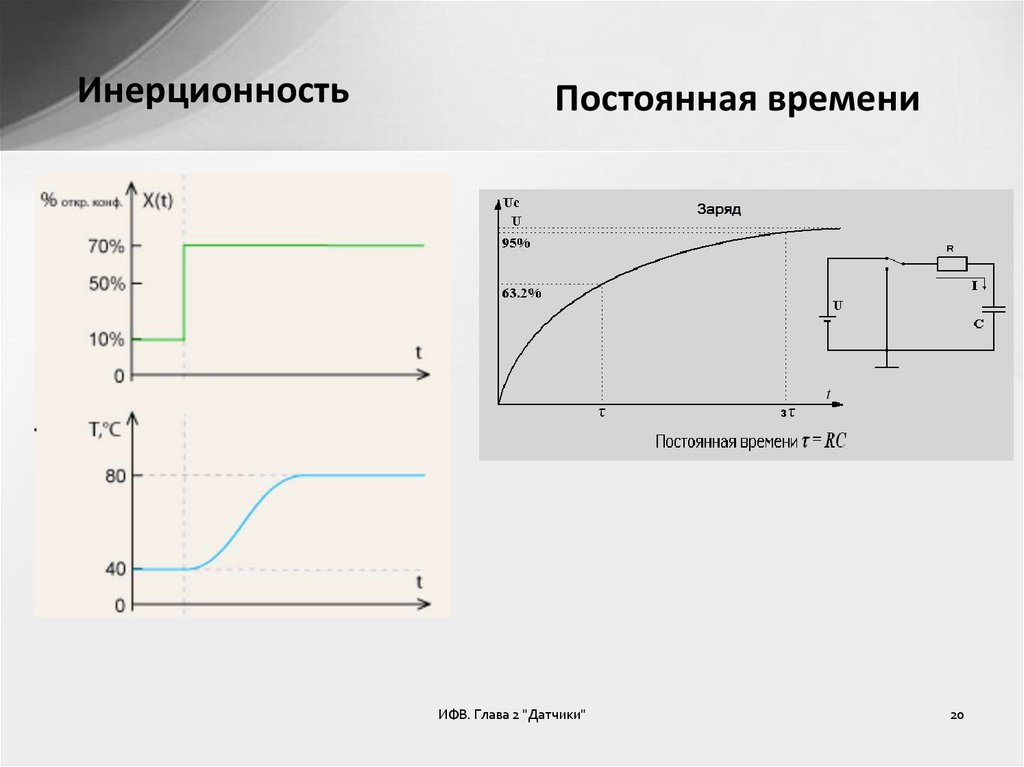
Инерционность
Постоянная времени
Насыщение
Диапазон изменения физической
величины
Диапазон рабочих температур
Дискретность измерения
Разрешающая способность
Параметры питания
Вид выходного сигнала
ИФВ. Глава 2 "Датчики"
2
3. Аналогия между биологическими (человек) и техническими (автомат) системами
3ИФВ. Глава 2 "Датчики"
3
4. Терминология
4Датчик (sensor, transduser, gauge)
Измерительный преобразователь (ИП)
Первичный ИП
Чувствительный элемент (ЧЭ) (load cell)
Промежуточный измерительный преобразователь
ГОСТ Р 51086-97 «ДАТЧИКИ И ПРЕОБРАЗОВАТЕЛИ ФИЗИЧЕСКИХ
ВЕЛИЧИН ЭЛЕКТРОННЫЕ. Термины и определения»
ИФВ. Глава 2 "Датчики"
4
5. Структура датчика
5Датчик
X
ЧЭ
e
(ПИП)
Промежу- e e Промежуточный
точный
…
ИП1
ИПN
Y
Измерительная
схема
Блок
визуализации
Измерительный
прибор
Х – входная измеряемая величина (внешнее воздействие),
обычно неэлектрической природы;
Y – выходной сигнал (электрический, унифицированный)
ИФВ. Глава 2 "Датчики"
5
6. Классификация датчиков
6По виду выходных величин
Активные (генераторные)
Пассивные (параметрические)
По принципу действия
Электрические
Магнитные
Оптические
Радиационные
Спектрометрические (волновые)
По среде передачи сигналов
Проводные
Беспроводные
По взаимодействию с источниками информации
Контактные
Бесконтактные
ИФВ. Глава 2 "Датчики"
6
7. Классификация датчиков
7По характеру выходного сигнала
Дискретные
Аналоговые
Цифровые
Импульсные
По количеству входных величин
Одномерные
Многомерные
По технологии изготовления
Элементные
Интегральные
По количеству выполняемых функций
Однофункциональные
Многофункциональные (интеллектуальные)
ИФВ. Глава 2 "Датчики"
7
8. Требования, предъявляемые к датчикам
8однозначная зависимость выходной величины от входной
стабильность характеристик во времени
высокая чувствительность
малые размеры и масса
отсутствие обратного воздействия на контролируемый процесс и
на контролируемый параметр
работа при различных условиях эксплуатации
различные варианты монтажа
ИФВ. Глава 2 "Датчики"
8
9. Области применения датчиков
9Промышленность (в том числе нефтегазовая…)
Робототехника
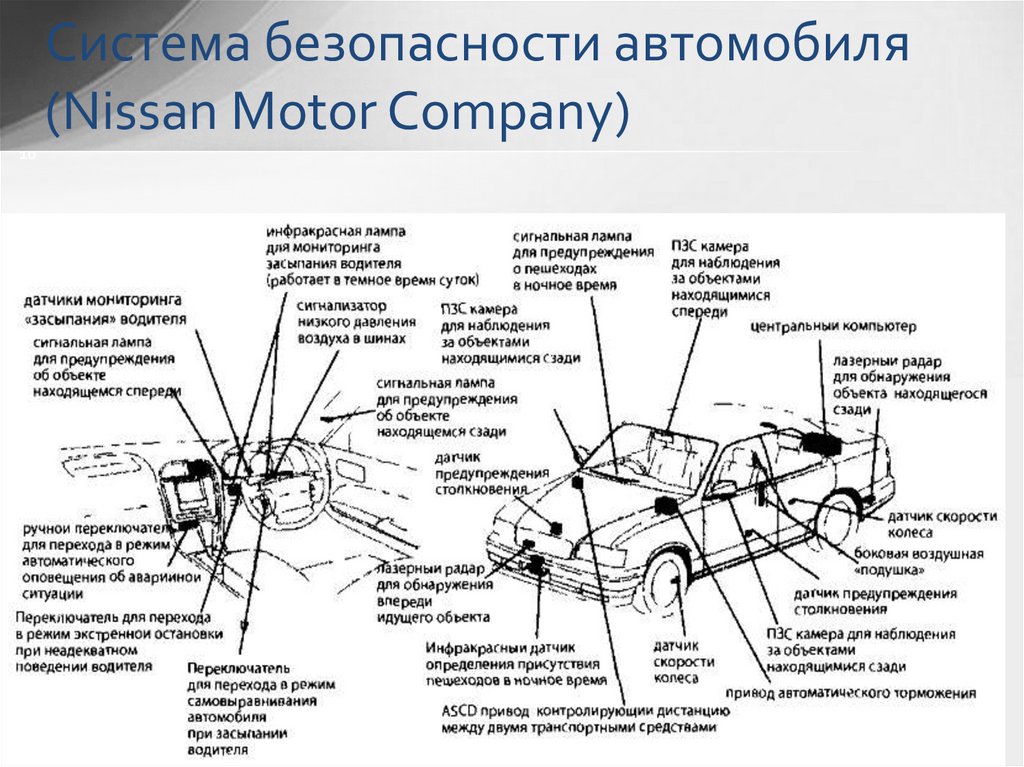
Автомобилестроение
Бытовая техника
Медицинская техника
Научные исследования
…
ИФВ. Глава 2 "Датчики"
9
10.
Система безопасности автомобиля(Nissan Motor Company)
10
ИФВ. Глава 2 "Датчики"
10
11. Распределение доли измерений различных величин в промышленности
1150% – температура
15% – расход (массовый и объемный)
10% – давление
5% – уровень
4% – время
<4% – электрические и магнитные величины
ИФВ. Глава 2 "Датчики"
11
12. Роль датчиков в системе сбора данных
Датчики вавтоматизированном
измерительном
комплексе:
1 – бесконтактный
2, 3 – пассивные
4 – активный
5 – внутренний элемент
системы сбора данных
ИФВ. Глава 2 "Датчики"
12
13. Распределение датчиков по частоте применения в бытовых приборах
131 – жидкостные регуляторы теплового расширения; 2 – биметаллические выключатели; 3 – датчики давления;
4 – терморезисторы с отрицательным ТКС; 5 – стержневые дилатометрические регуляторы; 6 – регуляторы
потока; 7 – электромеханические датчики импульсов; 8 - датчики стиральных машин;
9 – резистивные датчики; 10 – датчики концентрации солевого раствора
ИФВ. Глава 2 "Датчики"
13
14. Передаточная функция
Передаточная функция (ПФ) = функция преобразования = статическаяхарактеристика
Номинальная функция преобразования = градуировочная характеристика
YН = fН (X) – номинальная ПФ
YР = fР (X) –реальная ПФ
ΔХ = ХН - Х1 – погрешность ИП (на входе)
df (X)
Y X
dX
ΔY - погрешность ИП (на выходе)
ИФВ. Глава 2 "Датчики"
14
15. Виды передаточных функций
Одномерная ПФМедный термометр
сопротивления:
Rt R0 [1 T (t t 0 )]
Платиновый термометр
сопротивления:
Многомерная ПФ
Инфракрасный датчик температуры:
U = G (T4ОИ – Т 4Д)
U – выходное напряжение
Тои – абсолютная температура объекта измерения
Тд – абсолютная температура поверхности датчика
G - const
Rt R0 [1 T (t t 0 ) T (t t 0 ) 2 ]
ИФВ. Глава 2 "Датчики"
15
16. Чувствительность
YS
X
Отметка
шкалы
Указатель
0
5
Цена деления
10
15
20
25
Деление шкалы
Диапазон измерений
Порог чувствительности
можно принять равным
половине цены деления
Нижний предел
измерений
Начальное
значение шкалы
Верхний предел
измерений
Конечное
значение шкалы
Диапазон показаний
ИФВ. Глава 2 "Датчики"
16
17. Калибровка, погрешность, точность
YКалибровка
(тарировка, градуировка)
Погрешность
Точность
Ошибка калибровки
X
ИФВ. Глава 2 "Датчики"
17
18. Нелинейность
ГистерезисИФВ. Глава 2 "Датчики"
18
19. Воспроизводимость
вв
100 %
Хк
ИФВ. Глава 2 "Датчики"
Мертвая зона
19
20.
ИнерционностьПостоянная времени
ИФВ. Глава 2 "Датчики"
20
21.
НасыщениеЕще характеристики…
Диапазон изменения физической
величины
Диапазон рабочих температур
Дискретность измерения
Разрешающая способность
Параметры питания
Вид выходного сигнала
ИФВ. Глава 2 "Датчики"
21