 mathematics
mathematicsSimilar presentations:

")
")







Общая характеристика дисциплины
1.
Лекция 1.1.
ОБЩАЯ ХАРАКТЕРИСТИКА ДИСЦИПЛИНЫ
1.1. Цель изучения задачи дисциплины
Дисциплина «Точность измерительных устройств» имеет своей целью
сформировать у студентов компетенции, связанные со
пониманием
причин,
характера
изменения
и
знанием
методов
и
оценки
погрешностей измерительных устройств, путей повышения статической
и
динамической
точности
с
использованием
конструктивно-
технологических и структурных методов, подачи тестовых сигналов и
автоматической
подстройки
измерительных
каналов,
принципов
модуляции и комплексирования.
1
2.
1.2. Задачами дисциплиныЗадачами являются получение практических навыков по расчету
погрешностей
измерительных
устройств,
по
применению
конструктивно-технологических и структурных методов повышения
точности путем подачи тестовых
сигналов
и
автоматической
подстройки измерительных каналов, реализации принципов модуляции
и
комплексирования
полученных
знаний
сигналов
и
для последующего
навыков
при
применения
выполнении выпускной
квалификационной работы бакалавра и при выполнении различных
видов работ в профессиональной сфере проектно-конструкторской и
научно-исследовательской деятельности.
2
3.
В результате изучения дисциплины студент должен знать:• характер погрешностей измерительных устройств статического и
астатического
уравновешивания,
особенности
измерительных
устройств развертывающего уравновешивания;
• конструктивно-технологические и структурные методы повышения
точности измерительных устройств;
• особенности применения и реализации путей повышения точности
с помощью
тестовых
измерительных
сигналов
каналов
автоподстройки,
с
реализации
и
автоматической
управляемой
принципов
подстройки
периодичностью
модуляции
и
комплексирования.
3
4.
По итогам изучения дисциплины студент должен уметь и владетьнавыками:
• проводить
расчет
погрешностей
измерительных
устройств
уравновешивающего преобразования;
• применения конструктивно-технологических и структурных методов
повышения точности;
• подачи
тестовых
измерительных
сигналов
каналов
с
и
автоматической
управляемой
подстройки
периодичностью
автоподстроек;
• реализации
выполнении
принципов
выпускной
модуляции
и
комплексирования
квалификационной
работы
при
и
в
профессиональной деятельности.
4
5.
1.3 Учебно-методическое обеспечение дисциплины1. Основная литература:
1. Солдаткин В.М., Солдаткин В.В., Никитин А.В. Основы
проектирования
измерительных
приборов
и
измерительновычислительных систем: Учебное пособие (с грифом УМО) – Казань:
Изд-во Казан. гос. техн. ун-та, 2014. – 244с.
2. Дополнительная литература:
1. Солдаткин В.В., Солдаткин В.М. Анализ погрешностей и методы
повышения точности измерительных приборов и систем: Учебное
пособие вузов России по образованию в области приборостроения и
оптотехники. – Казань: Изд-во Казан. гос. техн. ун-та, 2009. – 248с.
2. Солдаткин В.М. Методы и средства измерения аэродинамических
углов летательных аппаратов. – Казань: Изд-во Казан. гос. техн. ун-та,
2001. – 448с.
5
6.
2. ЗНАНИЯ, НЕОБХОДИМЫЕ ДЛЯ ОСВОЕНИЯ ДИСЦИПЛИНЫВопросы обеспечения точности измерительных приборов и систем,
которые являются предметом изучения данной дисциплины, базируются
на знаниях, полученных в дисциплине «Основы проектирования
приборов и систем», и в первую очередь на:
1.
Понятие и классификация погрешностей измерительных каналов
приборов и систем.
2.
Характеристиках
случайных
погрешностей
измерительных
составляющих
погрешностей
устройств.
3.
Правилах
суммирования
измерительных каналов, приборов и систем.
6
7.
Основные понятия и классификация погрешностейОдной из основных характеристик измерительных приборов и
систем является точность, которая определяет степень
совершенства и качество их работы. Более широкое использование
получила характеристика, противоположная точности
–
погрешность.
В общем случае результат x(t) любого измерения отличается от
истинного значения xи(t) измеряемой величины на величину
погрешности измерения
∆x= x(t) – xи(t),
(1)
которая зависит от точности используемого метода и средства
измерения, квалификации оператора и условий, при которых
производится измерение.
7
8.
Погрешностью Δy измерительного прибора, системы ииного средства измерения называется разность между значением
y(t) выходного сигнала (показанием прибора, системы) и
значением выходного сигнала yи(t), измеренным идеальным
измерительным прибором, системой (истинным значением), т.е.
∆y= y(t) – yи(t)
(2)
Следовательно, погрешность измерительного прибора,
системы и иного измерительного устройства принадлежит
данному средству измерения и может быть определена при
испытаниях и занесена в его паспорт.
Погрешности
измерительных
приборов
и
систем
классифицируют по следующим признакам.
8
9.
Классификация погрешностей по размерностиВ зависимости от размерности различают: абсолютные погрешности,
относительные погрешности, приведенные относительные погрешности.
Абсолютные погрешности измерительных приборов, систем и
других измерительных устройств (ИУ) выражаются в единицах
измеряемой величины и равны разности между его показанием x и
действительным (истинным) значением измеряемой величины xи ,
т.е. Δx=x – xи.
Абсолютная погрешность ИУ в единицах выходного сигнала
(приведенная к выходу ИУ) будет равна: Δy=y – yи, где y – фактический
выходной сигнал; yи – идеальный выходной сигнал, т. е. значение
выходного сигнала, отвечающее действительному (истинному) значению
измеряемой величины в соответствии с заданной статической
характеристикой.
9
10.
Рассматривая малое приращение сигнала Δy как дифференциал функции y=f(x), можнополучить приближенную связь между погрешностями Δx и Δy:
y
dy
x S x ,
dx
(3)
где S – чувствительность ИУ.
Относительная погрешность ИУ равна отношению абсолютной погрешности Δx и Δy к
текущему значению соответствующей величины x и y:
x
x
;
x
y
y
.
y
(4)
Если характеристика прибора линейна и проходит через начало координат (y=S x), то
δx = δy =
x y
.
x
y
(5)
При x≈0 или y ≈0 , δx , δy , δ → ∞ !
10
11.
Поэтому широко используется приведенная относительная погрешность ИУ, равнаяотношению абсолютной погрешности Δx или Δy к соответствующей абсолютной величине
диапазона измерения xд или yд:
x
x
;
xД
y
y
y
.
yД yВ yН
(6)
Если характеристика ИУ линейна (y= A+ Sx), то
x y
.
xД y Д
Наибольшая приведенная относительная погрешность, выраженная в процентах,
называется классом точности измерительного прибора (системы) K, т.е.
К max 100%
xmax
y
100% max 100% .
xД
yД
(7)
11
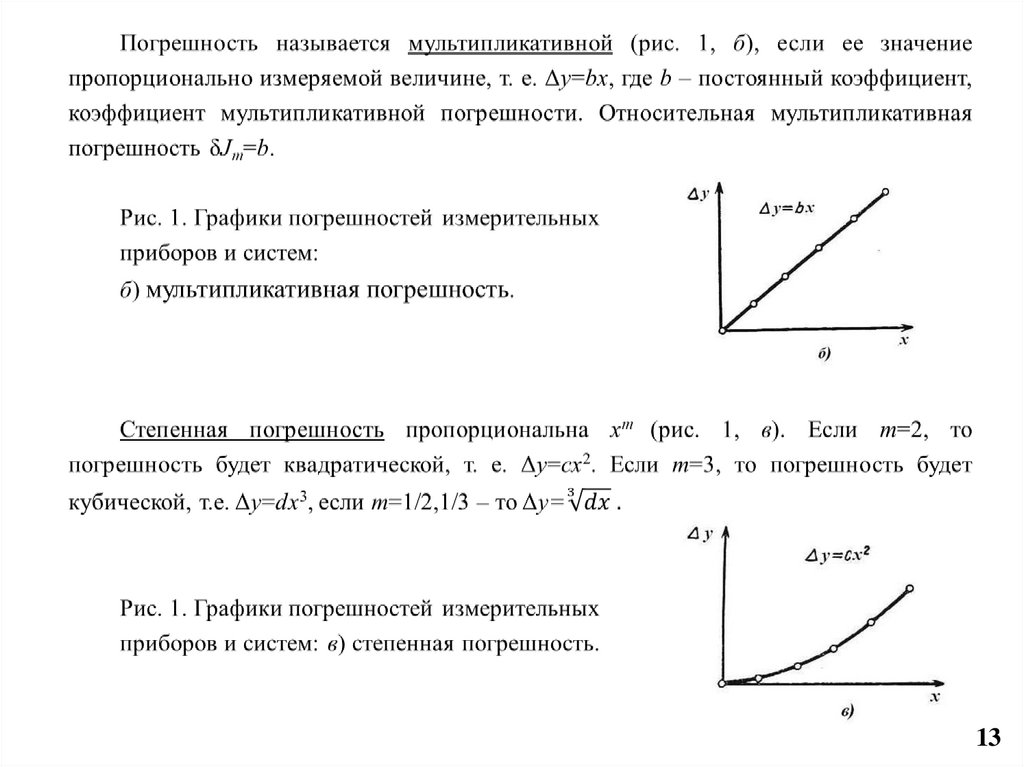
12.
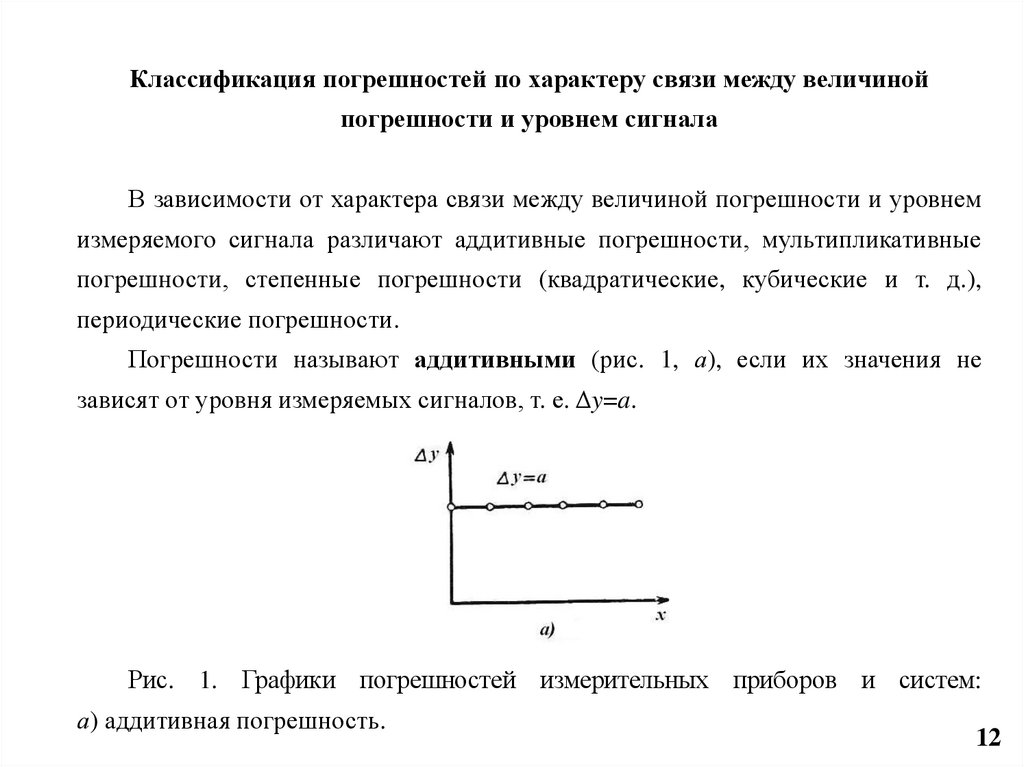
Классификация погрешностей по характеру связи между величинойпогрешности и уровнем сигнала
В зависимости от характера связи между величиной погрешности и уровнем
измеряемого сигнала различают аддитивные погрешности, мультипликативные
погрешности, степенные погрешности (квадратические, кубические и т. д.),
периодические погрешности.
Погрешности называют аддитивными (рис. 1, а), если их значения не
зависят от уровня измеряемых сигналов, т. е. Δy=a.
Рис. 1. Графики погрешностей измерительных приборов и систем:
а) аддитивная погрешность.
12
13.
1314.
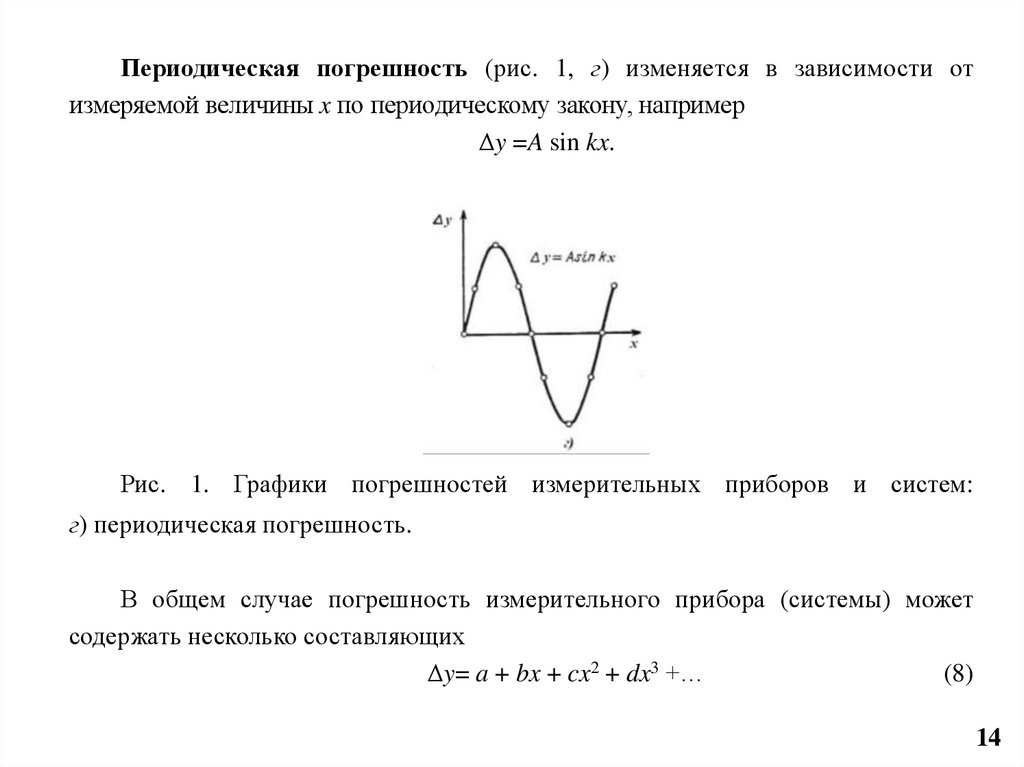
Периодическая погрешность (рис. 1, г) изменяется в зависимости отизмеряемой величины x по периодическому закону, например
Δy =A sin kx.
Рис. 1. Графики погрешностей измерительных приборов и систем:
г) периодическая погрешность.
В общем случае погрешность измерительного прибора (системы) может
содержать несколько составляющих
Δy= a + bx + cx2 + dx3 +…
(8)
14
15.
Классификация погрешностей по закономерности их появления примногократных измерениях
Если в основу классификации положить повторяемость погрешностей при
многократных
измерениях,
то
все
погрешности
можно
разделить
на
систематические и случайные.
Систематические погрешности имеют определенное значение в каждой
точке статической характеристики измерительного прибора или системы и при
многократных измерениях в одинаковых условиях закономерно повторяются. Они
вызываются несовершенством методов измерения и схем конструкций приборов.
Влияние систематических погрешностей может быть заранее установлено и
учтено. В современных приборах и системах систематические погрешности
компенсируются при помощи специальных устройств или учитываются при
обработке результатов измерений.
15
16.
Случайные погрешности – это погрешности, имеющие рассеяние повеличине и знаку при многократных испытаниях (измерениях) в одних и тех же
условиях, причем появление тех или иных значений случайных погрешностей
при единичных замерах незакономерно.
Возникновение
случайных
погрешностей
обусловлено
случайными
изменениями параметров в уравнениях измерения, случайными изменениями
параметров схем и конструкций приборов и систем, влиянием внешних
случайных возмущений и т. д. В общем случае случайные погрешности могут
содержать систематическую составляющую.
В ряде случаях выделяют прогрессирующие погрешности – медленно
изменяющиеся во времени, которые вызываются процессами старения деталей,
разрядом источника питания, старением резисторов и других элементов
схемы и т.п.
16
17.
Классификация погрешностей по причинам их появленияВ зависимости от причин, порождающих погрешности, различают методические и
инструментальные погрешности.
Методические погрешности возникают из-за несовершенства метода измерения, т. е.
неоднозначной связи между измеряемой величиной и величиной, воспринимаемой
чувствительным элементом прибора или системы, а также из-за приближений, допускаемых
при проектировании прибора или системы. Методические погрешности характерны, в
частности, для приборов и систем, принцип действия которых основан на косвенных методах
измерения. Например, градуировочная формула барометрического высотомера, выражающая
зависимость атмосферного давления p от высоты H, в диапазоне высот от 0 до 11км имеет
вид
1
R
H
,
p p0 1
T
0
где R – универсальная газовая постоянная; τ – высотный градиент температуры.
17
18.
Входящие в эту формулу параметры в соответствии со стандартнойатмосферой СА-73, принимаются равными некоторым постоянным значениям:
р0=760 мм рт.ст.; T0=288,16 K; R=29,27м/град; τ=0,0065 град/м. При реальных
измерениях эти параметры могут отличаться от принятых значений, что и
приводит к методическим погрешностям.
Методические погрешности не зависят от качества изготовления прибора
или системы, они одинаковы для всех образцов данного типа.
Инструментальные
погрешности
возникают,
во-первых,
из-за
несовершенства технологического процесса изготовления прибора или системы,
во-вторых, в следствии изменения геометрических размеров и физических
характеристик деталей и узлов прибора (системы) при изменении окружающих
условий и, в третьих, из-за изменения характеристик прибора или системы при
изменении режимов питания, влияния внешних возмущений на параметры
прибора или системы.
18
19.
Классификация погрешностей по характеру изменения во времениПо данному признаку погрешности измерительных приборов и систем
можно разделить на статические и динамические.
Статические погрешности Δyст возникают при установившемся режиме
измерения, когда измеряемая величина x и выходной сигнал y сохраняют
постоянное значение.
Динамические погрешности Δyдин имеют место при неустановившемся
режиме измерения. Под динамической погрешностью понимают ту часть
погрешности,
которая
добавляется
к
статической
погрешности
в
неустановившемся режиме измерения и является функцией времени.
Следовательно, общая погрешность прибора в неустановившемся режиме
измерения равна сумме статической и динамической погрешностей
Δy(t)= Δyст + Δyдин(t).
(9)
19
20.
Классификация погрешностей в зависимости от условий работыприбора или системы
Практика технических измерений показывает, что экспериментальная оценка
точности измерительных приборов и систем ведется вначале при нормальных
условиях, а затем при отклонениях условий измерений от нормальных. Поэтому
принято делить статические и динамические погрешности на две части: основная
и дополнительная погрешности.
Основная
статическая
погрешность
имеет
место
при
проведении
измерений в нормальных условиях, которые определяются следующими
значениями климатических факторов: давление воздуха 760 мм рт. ст.,
температура 20±5ºC, влажность 20 60%. При этом за рабочее положение
прибора принимается то, которое указано либо на шкале или в его паспорте.
Кроме того, предполагается отсутствие переносных линейных и угловых
ускорений, нормальный режим питания и т. п.
20
21.
Основная статическая погрешность прибора или системы возникает подвлиянием многих факторов, она формируется на всех этапах проектирования и
изготовления измерительного прибора или системы.
Основную погрешность, в зависимости от причин ее появления можно
разделить на следующие виды:
• погрешность приближения (при проектировании реализуется не заданная, а
близкая к ней характеристика (например, линейная));
• погрешность от изменения внутренних параметров измерительного прибора
или
системы
(например,
при
изготовлении,
производственно-
технологическая);
• погрешность от вредных внутренних воздействий (от действия внутренних
дестабилизирующих факторов) – износ, питание, магнитные поля, термоЭДС.
21
22.
Дополнительной
погрешностью
называется
та
часть
статической
погрешности, которая добавляется к основной погрешности при отклонении
условий работы прибора или системы от нормальных.
Условия работы измерительных приборов и систем характеризуются
комплексом внешних параметров, к числу которых относятся климатические
(давление, температура, влажность); механические (наклоны, переносные
линейные и угловые ускорения); параметры режимов питания (напряжение,
частота,
давление,
расход);
параметры
внешних
полей
(магнитных,
электрических); параметры радиационных излучений и т. п.
Отклонение внешних параметров от их номинальных значений приводит к
изменению внутренних параметров и внутренних вредных воздействий или к
появлению новых вредных воздействий существенно влияющих на работу
приборов и систем. В итоге и появляется дополнительная погрешность прибора
(системы).
22
23.
Можнорассматривать
частную
дополнительную
погрешность,
т.е.
погрешность, возникающую под влиянием только одного дестабилизирующего
фактора, например дополнительную погрешность, обусловленную изменением
окружающей температуры или режима питания и т. п.
Динамическую погрешность, так же как и статическую можно разделить на
две составляющие – основную и дополнительную.
Основная динамическая погрешность имеет место при нормальных
условиях работы измерительного прибора или системы.
Основную динамическую погрешность можно, в свою очередь, разделить на
собственную и вынужденную.
23
24.
Источникамисобственной
динамической
погрешности
являются
инерционные и демпфирующие элементы прибора (системы), характеризуемые
определенными параметрами (массой, моментом инерции, коэффициентом
демпфирования, индуктивностью, емкостью и т. п.). Наличие в измерительной
цепи прибора или системы указанных элементов приводит к запаздыванию
процессов преобразования и передачи информации, а также и динамическим
искажениям выходного сигнала прибора или системы.
Источниками
вынужденной
динамической
погрешности
являются
внешние помехи, внутренние шумы и наводки, под влиянием которых в
измерительной цепи прибора или системы генерируется паразитная переменная
составляющая сигнала.
В отличие от собственной динамической погрешности, которая проявляется
только при изменении входной величины x, источники шумов и помех создают
вынужденную динамическую погрешность в виде переменной составляющей в
выходном сигнале, даже если входная величина x сохраняет постоянное значение
и не сопровождается входной помехой.
24
25.
Дополнительная динамическая погрешность возникает при отклонении
условий работы измерительного прибора и системы от нормальных. В
результате
значение
отличается
от
параметров
номинальных,
что
внешних
и
воздействий
является
существенно
причиной
появления
дополнительной погрешности. Внешние воздействия, под влиянием которых
возникает дополнительная динамическая погрешность, можно разделить на
следующие виды: климатические воздействия; механические воздействия
(например, линейная или угловая вибрация, удары), электрические и
электромагнитные воздействия (наводки, помехи, пульсации напряжения
питания),
помехи,
сопровождающие
полезный
сигнал
на
входе
измерительного прибора или системы.
25