




:")











 electronics
electronicsSimilar presentations:








")

Электромеханические исполнительные элементы
1.
Министерство образования и науки Российской Федерациифедеральное государственное бюджетное образовательное учреждение
высшего профессионального образования
БАЛТИЙСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
«ВОЕНМЕХ» им. Д.Ф. УСТИНОВА
Кафедра Н1
Мехатроника и робототехника
К.т.н., доцент Савельев Б.Н.
Электромеханические
исполнительные элементы
презентация курса лекций
Часть 1(постоянного тока)
Санкт – Петербург
2015 г.
2.
ВведениеОсновные понятия и определения
1. Механика - наука о механическом движении материальных тел и происходящих при этом
взаимодействиях между телами.
2. Привод
– устройство приведения в движение механических объектов различного назначения.
3. Система автоматического привода (САП)
САП- совокупность устройств, объединенных в систему, предназначенную для приведения в
движение и управления движением рабочих органов машин или иных механических объектов
управления в соответствии с заданной технологией.
4. Электроника
- наука о взаимодействии электронов с электромагнитными полями и о методах
создания приборов и устройств, в которых это взаимодействие используется
для преобразования электромагнитной энергии, в основном, для передачи,
обработки и хранения информации
5. Мехатроника
-область науки о механическом движении, взаимодействии твердых тел и
управлении их движением с использованием электронных приборов и
устройств.
6. Мехатронная система
- система автоматического управления движением механических
объектов, построенная с использованием электронных приборов и
устройств.
3.
Основные понятия и определения7. Техническая система - устройство, которое обладает совокупностью следующих основных признаков:
- является законченным видом технической продукции;
- состоит из взаимодействующих элементов, узлов, агрегатов, подсистем;
- самостоятельно выполняет определенные функции;
- взаимодействует с внешней средой и другими техническими объектами.
8. Управление - процесс целесообразного воздействия на объект управления, обеспечивающий его
желаемое (заданное) поведение, режим работы или выходные переменные.
9. Регулирование - частный случай процесса управления, целью которого является воспроизведение
системой поступающих на нее извне заданий (задающих воздействий).
10. Автоматизация - процесс исключения человека из технологического процесса или из отдельных
его операций (выполнение операций без непосредственного участия человека).
11. Система автоматического управления (САУ)
САУ каким-либо объектом называется техническая система, включающая в себя этот объект
управления(ОУ) и присоединяемую к нему автоматическую аппаратуру, обеспечивающую
заданный режим работы или выходные переменные объекта в соответствии с командами
задающего устройства, являющегося частью этой автоматической аппаратуры.
12. Автоматическая управляющая система -автоматическая аппаратура САУ.
13. Система автоматического регулирования (САР)
САР – техническая система, в которой задаваемый от внешнего задающего устройства режим
работы ОУ или его регулируемая переменная воспроизводится и поддерживается с помощью
присоединяемых к ОУ автоматически действующих устройств.
14. Автоматический регулятор - автоматические устройства САР,
4.
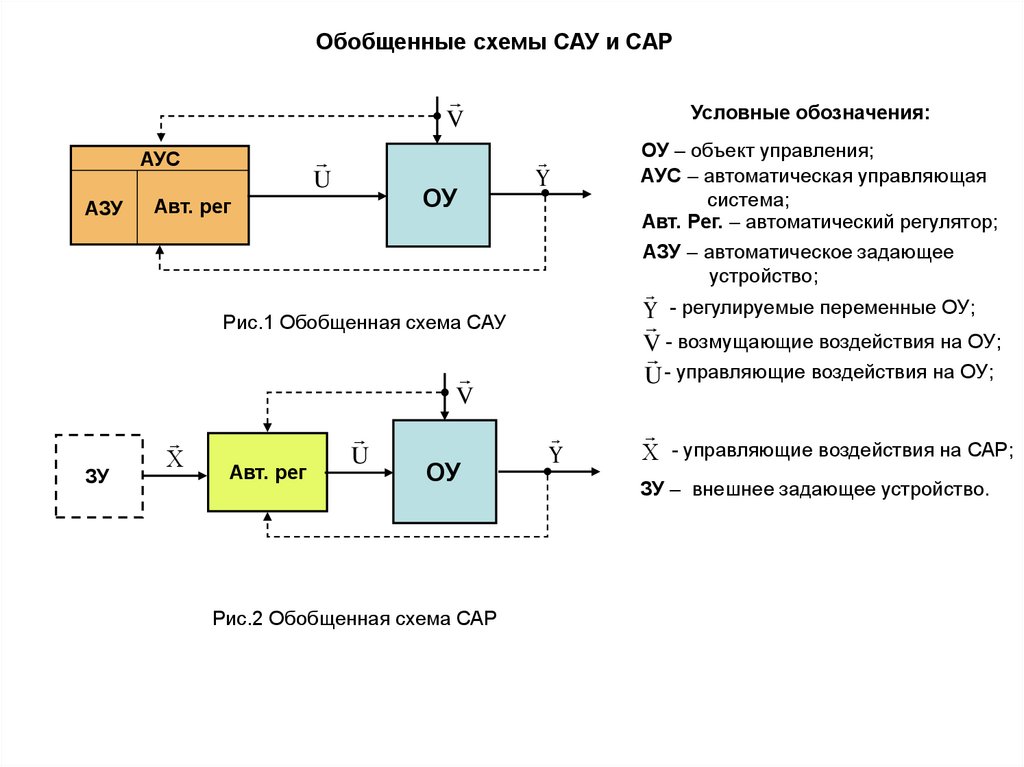
Обобщенные схемы САУ и САРV
U
АУС
АЗУ
ОУ
Авт. рег
Условные обозначения:
Y
Y - регулируемые переменные ОУ;
- возмущающие воздействия на ОУ;
V
U - управляющие воздействия на ОУ;
Рис.1 Обобщенная схема САУ
V
ЗУ
Авт. рег
U
ОУ
Рис.2 Обобщенная схема САР
ОУ – объект управления;
АУС – автоматическая управляющая
система;
Авт. Рег. – автоматический регулятор;
АЗУ – автоматическое задающее
устройство;
Y
- управляющие воздействия на САР;
ЗУ – внешнее задающее устройство.
5.
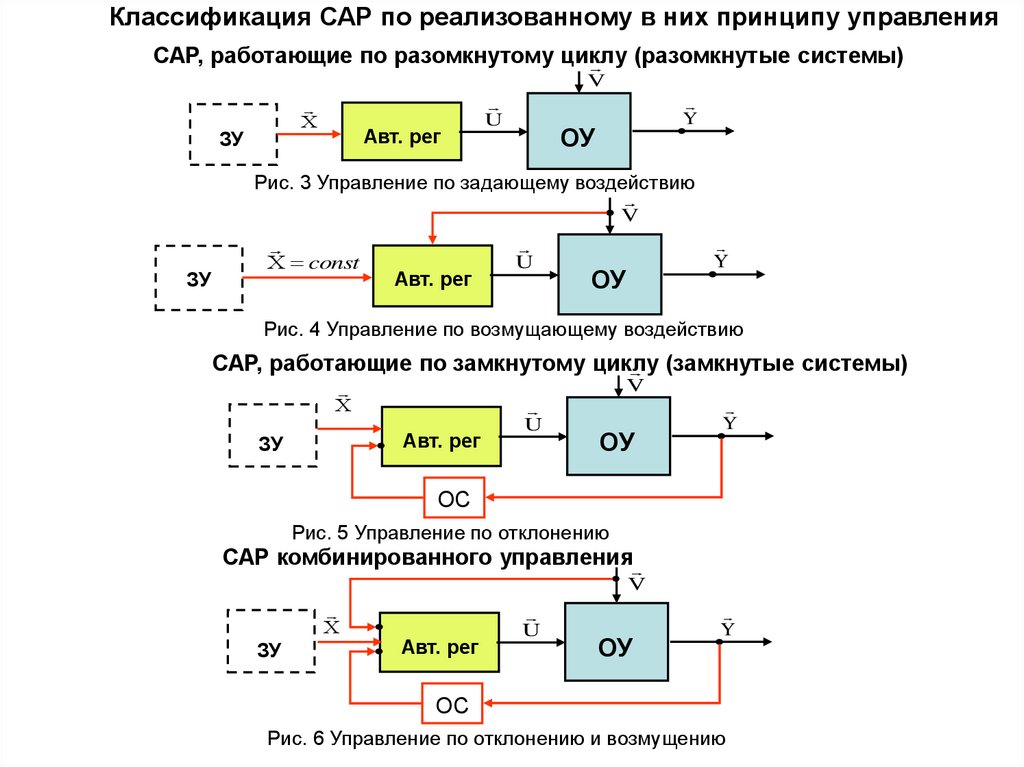
Классификация САР по реализованному в них принципу управленияСАР, работающие по разомкнутому циклу
(разомкнутые системы)
V
ЗУ
Авт. рег
U
Y
ОУ
Рис. 3 Управление по задающему воздействию
V
ЗУ
const
Авт. рег
U
Y
ОУ
Рис. 4 Управление по возмущающему воздействию
САР, работающие по замкнутому циклу
(замкнутые системы)
V
Авт. рег
ЗУ
U
ОУ
Y
ОС
Рис. 5 Управление по отклонению
САР комбинированного управления
V
ЗУ
Авт. рег
U
ОУ
Y
ОС
Рис. 6 Управление по отклонению и возмущению
6.
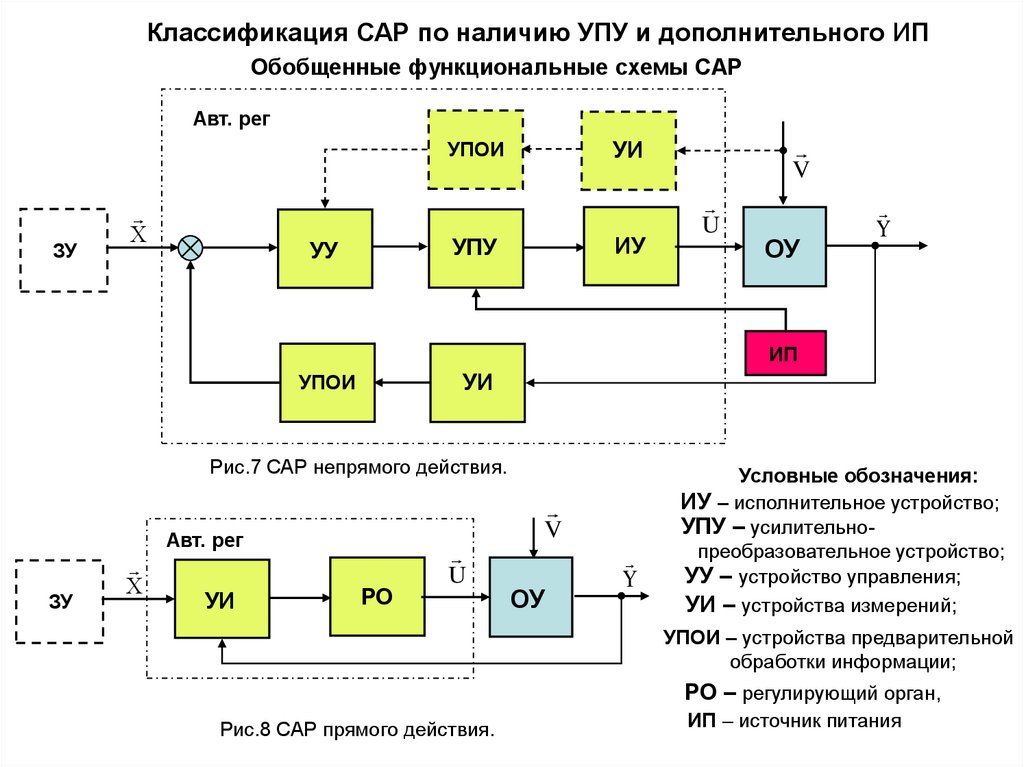
Классификация САР по наличию УПУ и дополнительного ИПОбобщенные функциональные схемы САР
Авт. рег
ЗУ
ИУ
УПУ
УУ
V
УИ
УПОИ
U
ОУ
Y
ИП
УИ
УПОИ
Рис.7 САР непрямого действия.
V
Авт. рег
ЗУ
УИ
РО
U
ОУ
Y
Условные обозначения:
ИУ – исполнительное устройство;
УПУ – усилительнопреобразовательное устройство;
УУ – устройство управления;
УИ – устройства измерений;
УПОИ – устройства предварительной
обработки информации;
РО – регулирующий орган,
Рис.8 САР прямого действия.
ИП – источник питания
7. СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПРЯМОГО ДЕЙСТВИЯ
РЕГУЛЯТОР ПОЛЗУНОВАРЕГУЛЯТОР УАТТА
ВОДА
ПАР
ОН
Паровая
турбина
Объект
нагрузки
Масса
Регулирующий
орган
Центробежный
механизм
ДАТЧИК УРОВНЯ
Регулирующий
орган
ПАР
ТОПКА
Рис. 10
Рис. 9
8.
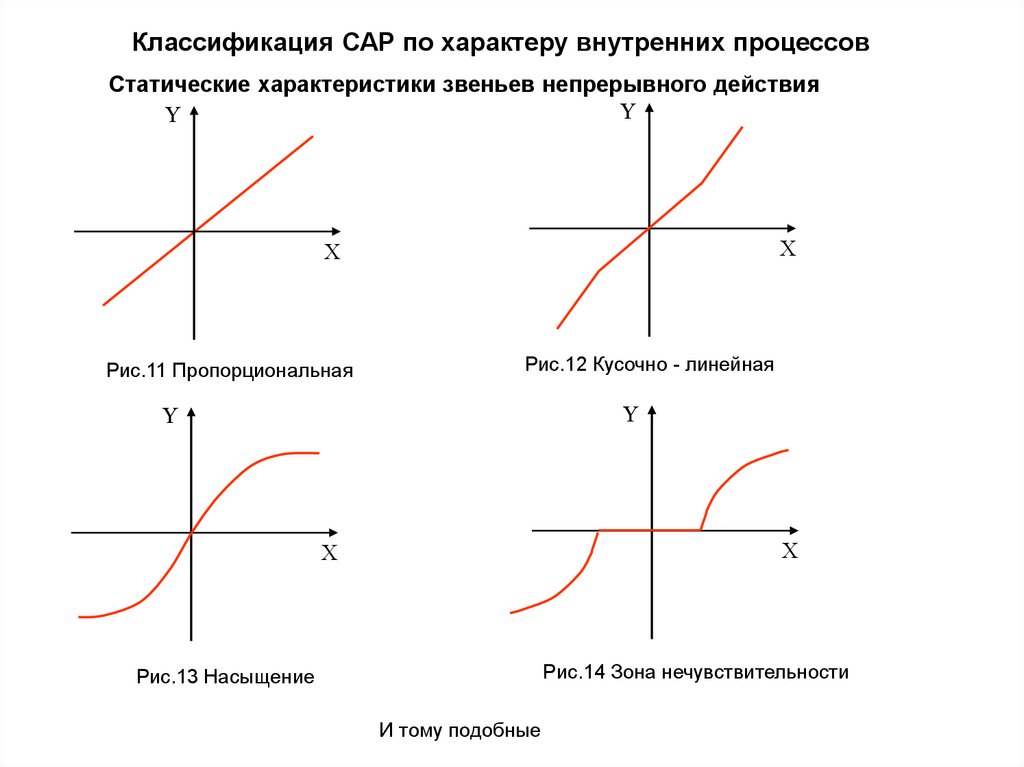
Классификация САР по характеру внутренних процессовСтатические характеристики звеньев непрерывного действия
Рис.11 Пропорциональная
Рис.12 Кусочно - линейная
Рис.14 Зона нечувствительности
Рис.13 Насыщение
И тому подобные
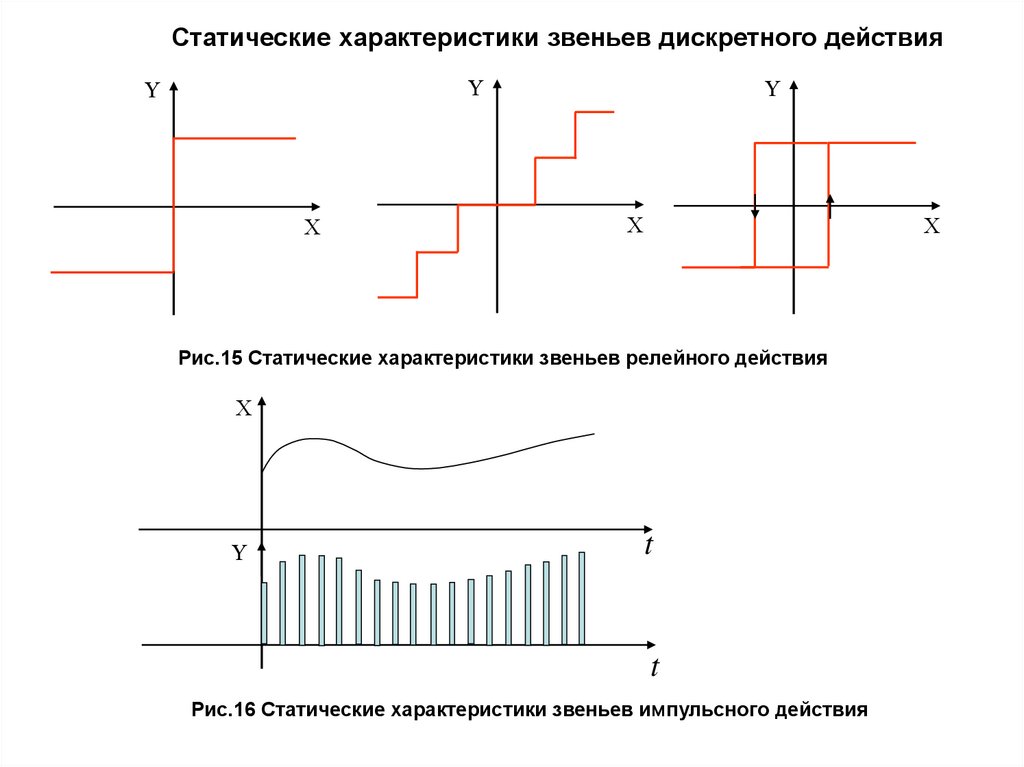
9.
Статические характеристики звеньев дискретного действияРис.15 Статические характеристики звеньев релейного действия
t
t
Рис.16 Статические характеристики звеньев импульсного действия
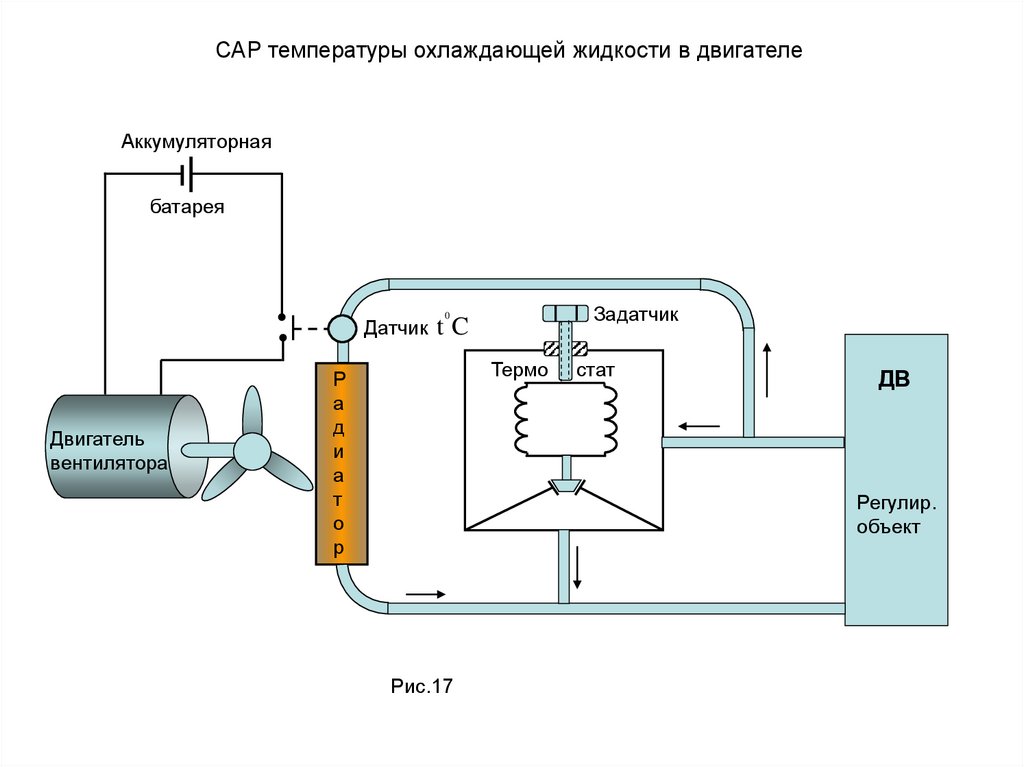
10.
САР температуры охлаждающей жидкости в двигателеАккумуляторная
батарея
Датчик
Двигатель
вентилятора
Задатчик
0
tC
Термо
Р
а
д
и
а
т
о
р
стат
ДВ
Регулир.
объект
Рис.17
11. Классификация приводов по схеме построения силовой части
Индивидуальный однодвигательныйпривод
Групповой привод
УУ
УУ
УМ
ИП
ИД
ИД
МП
МП
ОУ
Рис.18
ИП
УМ
ОУ2
ОУ1
1
ОУ3
2
Рис.19
3
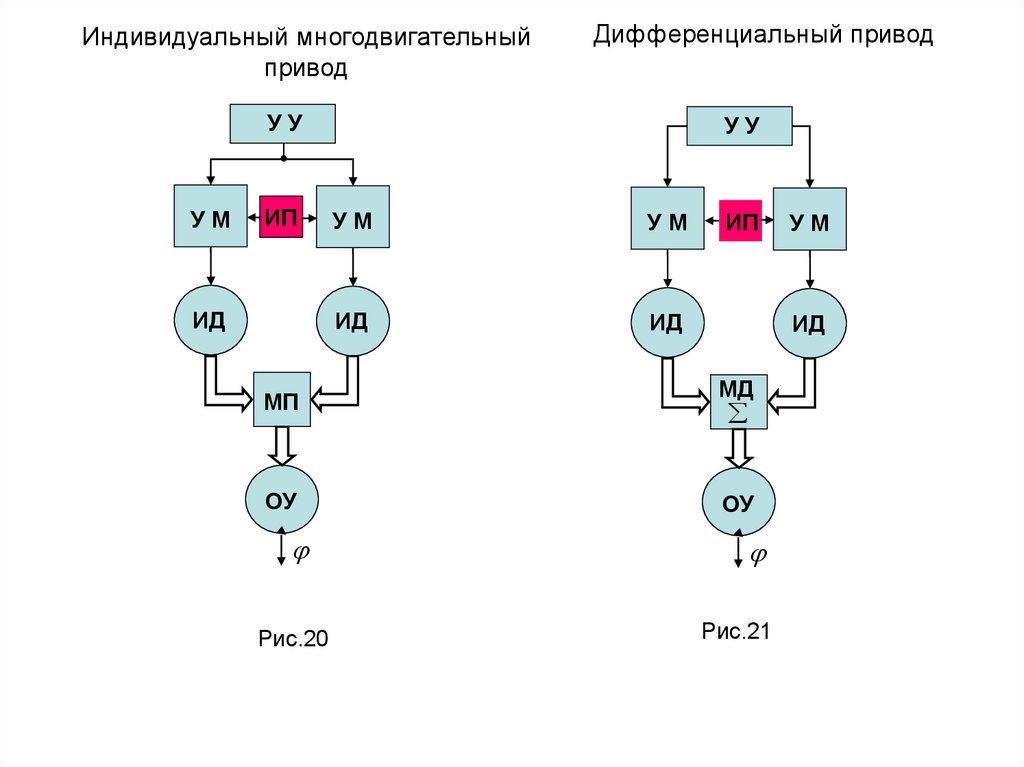
12.
Индивидуальный многодвигательныйпривод
Дифференциальный привод
УУ
УМ
ИП
ИД
МП
ОУ
Рис.20
УУ
УМ
УМ
ИД
ИД
ИП
УМ
ИД
МД
ОУ
Рис.21
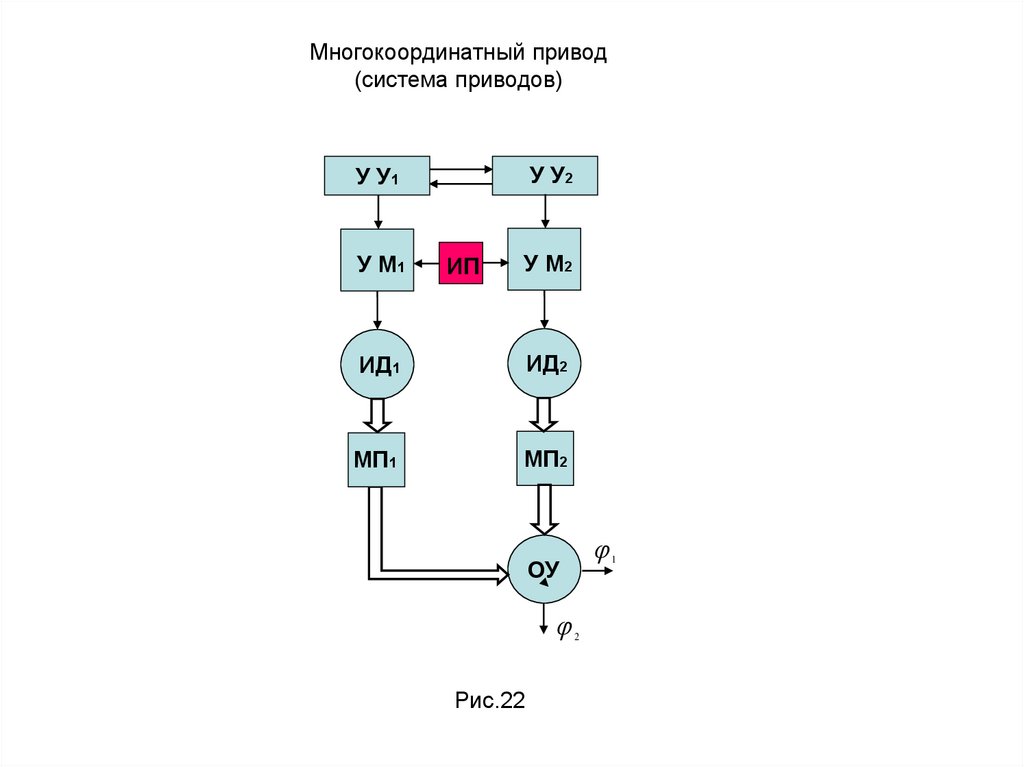
13.
Многокоординатный привод(система приводов)
У У2
У У1
У М1
ИП
У М2
ИД1
ИД2
МП1
МП2
ОУ
Рис.22
2
1
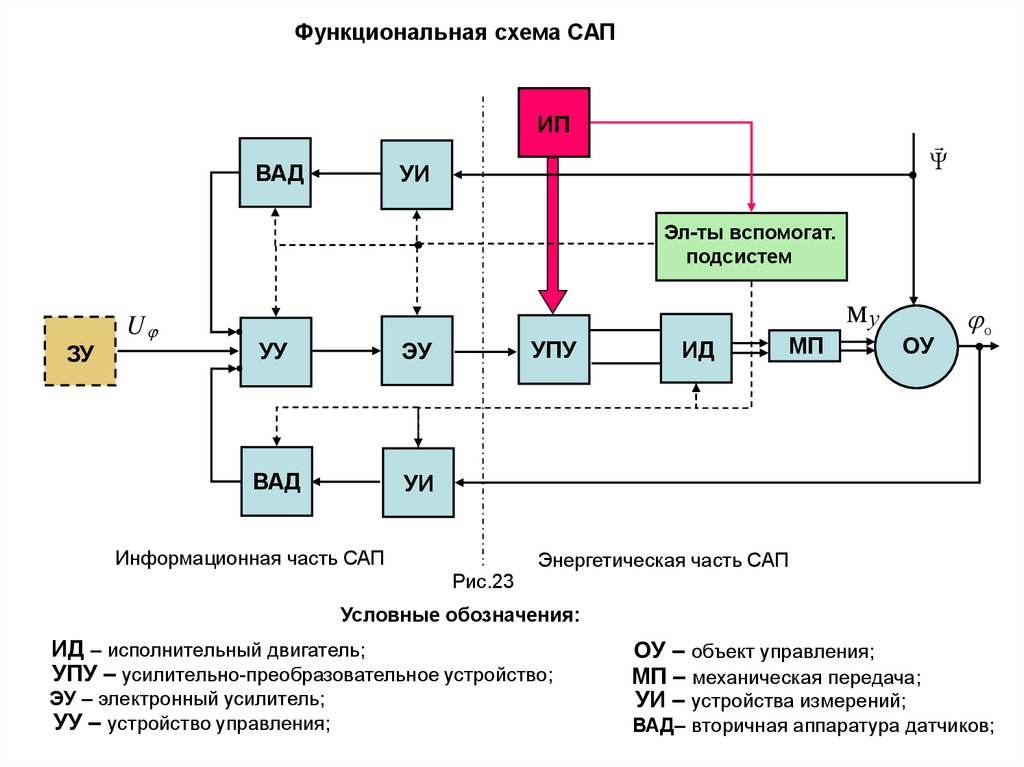
14.
Функциональная схема САПИП
ВАД
УИ
Эл-ты вспомогат.
подсистем
ЗУ
U
му
УУ
ЭУ
ВАД
УИ
УПУ
Информационная часть САП
Рис.23
ИД
МП
ОУ
О
Энергетическая часть САП
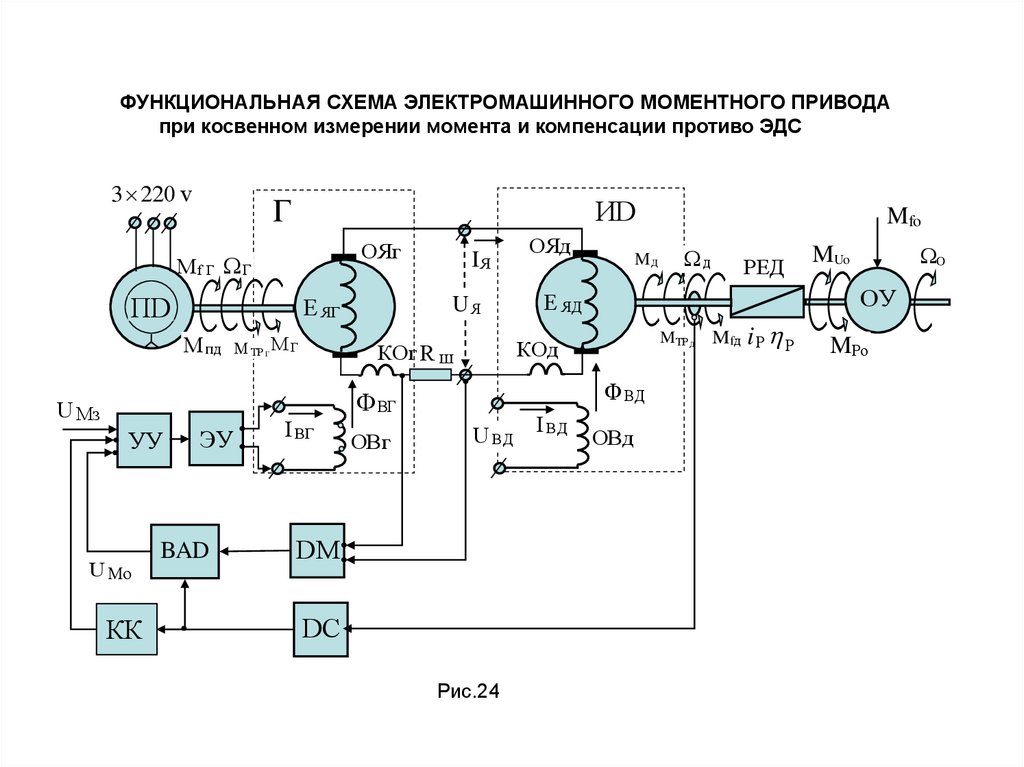
Условные обозначения:
ИД – исполнительный двигатель;
УПУ – усилительно-преобразовательное устройство;
ЭУ – электронный усилитель;
УУ – устройство управления;
ОУ – объект управления;
МП – механическая передача;
УИ – устройства измерений;
ВАД– вторичная аппаратура датчиков;
15.
ФУНКЦИОНАЛЬНАЯ СХЕМА ЭЛЕКТРОМАШИННОГО МОМЕНТНОГО ПРИВОДАпри косвенном измерении момента и компенсации противо ЭДС
3 220 v
Г
ИD
ОЯг
Mf Г Г
ПD
E ЯГ
M пд
M ТР Г M Г
IЯ
UЯ
УУ
U Мо
КК
U
ЭУ
BГ
BAD
I BГ
ОВг
MД
DМ
DС
Рис.24
РЕД
I BД
O
MUo
ОУ
MТР Д
Ф BД
U BД
д
E ЯД
КОд
КОг R ш
Ф BГ
U Мз
ОЯд
Mfo
ОВд
Mfд i Р Р
MРo
16.
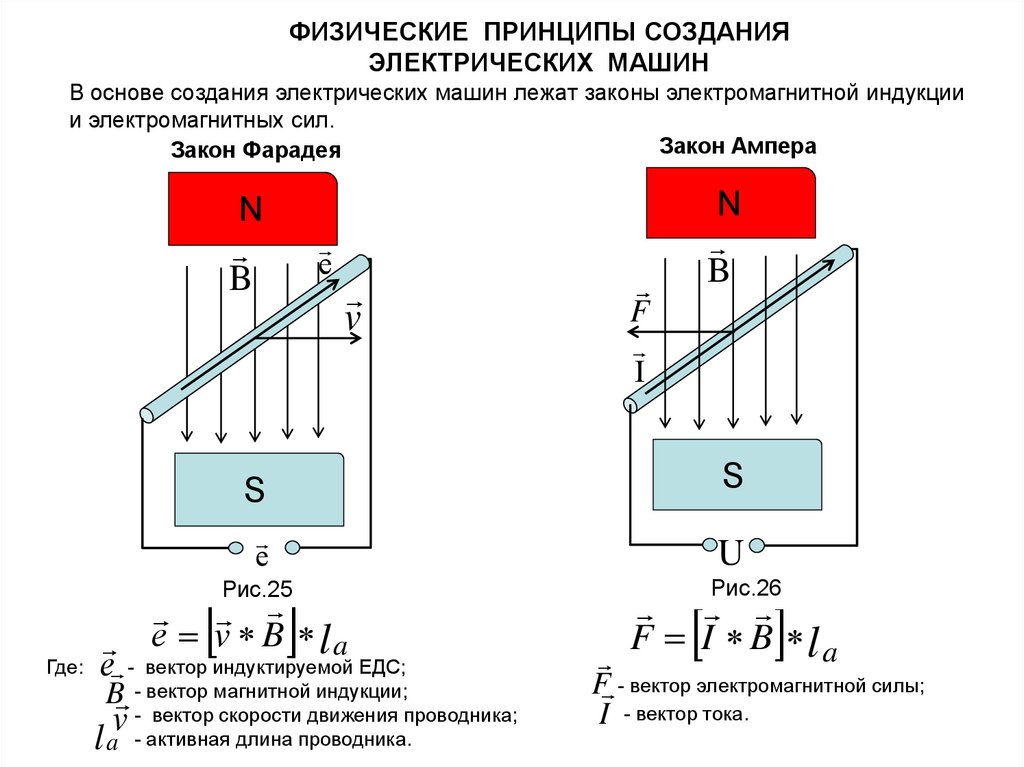
ФИЗИЧЕСКИЕ ПРИНЦИПЫ СОЗДАНИЯЭЛЕКТРИЧЕСКИХ МАШИН
В основе создания электрических машин лежат законы электромагнитной индукции
и электромагнитных сил.
Закон Ампера
Закон Фарадея
N
B
N
е
B
v
F
I
S
S
е
Рис.25
е v B la
Где: е - вектор индуктируемой ЕДС;
B - вектор магнитной индукции;
вектор скорости движения проводника;
v -- активная
длина проводника.
la
U
Рис.26
F I B la
F - вектор электромагнитной силы;
I - вектор тока.
17.
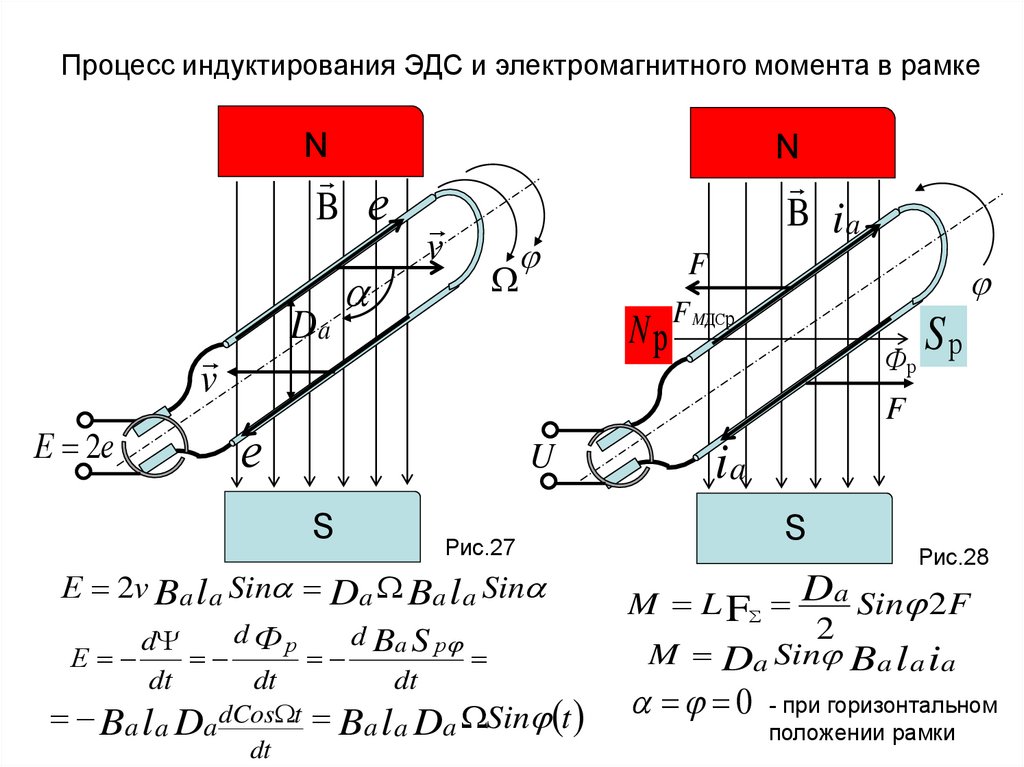
Процесc индуктирования ЭДС и электромагнитного момента в рамкеN
B
Da
v
Е 2е
N
е
v
Nр
F
F MДСр
S
р
Фр
F
е
U
S
ia
S
Рис.27
Е 2v Ba l a Sin Da Ba l a Sin
dФр
d Ba S р
d
Е
dt
dt
dt
Ba l a Da dCos t Ba l a Da Sin t
dt
B ia
Рис.28
M L F Da Sin 2 F
2
M Da Sin Ba l a ia
0
- при горизонтальном
положении рамки
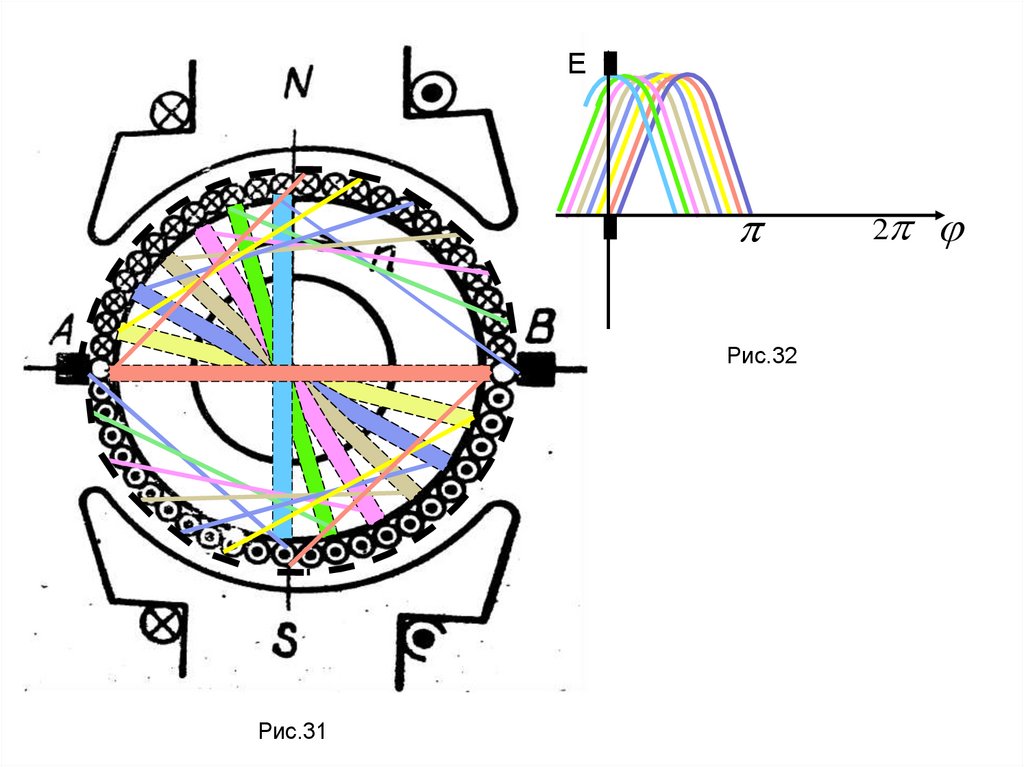
18.
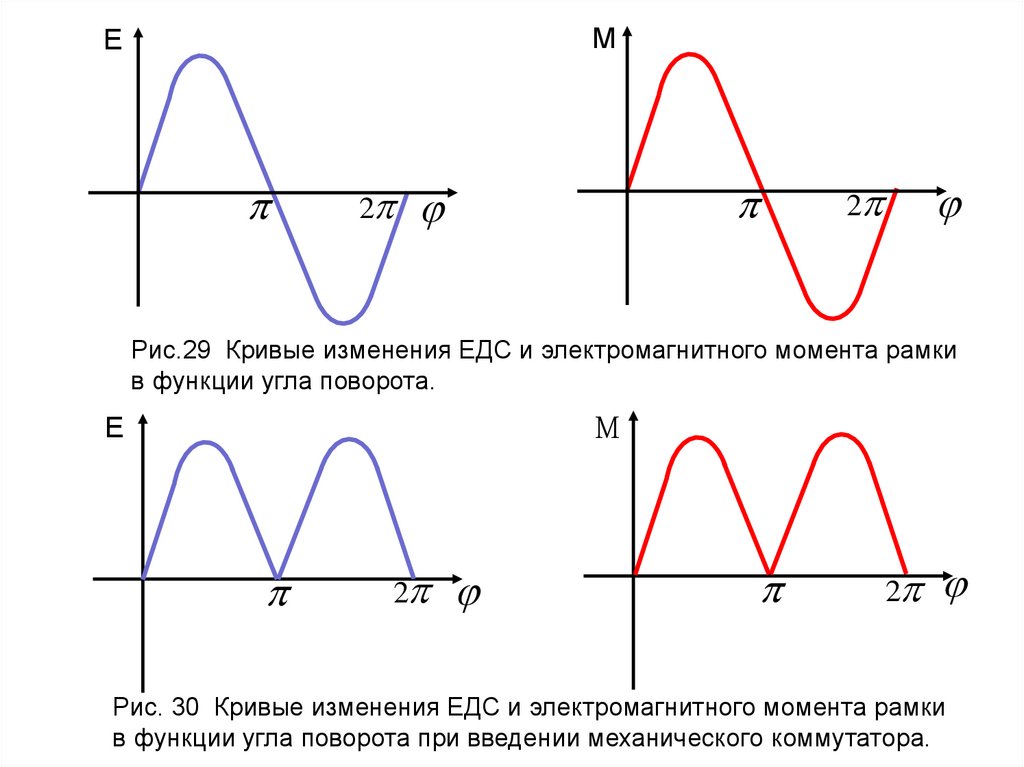
МE
2
2
Рис.29 Кривые изменения ЕДС и электромагнитного момента рамки
в функции угла поворота.
М
E
2
2
Рис. 30 Кривые изменения ЕДС и электромагнитного момента рамки
в функции угла поворота при введении механического коммутатора.
19.
EРис.32
Рис.31
2
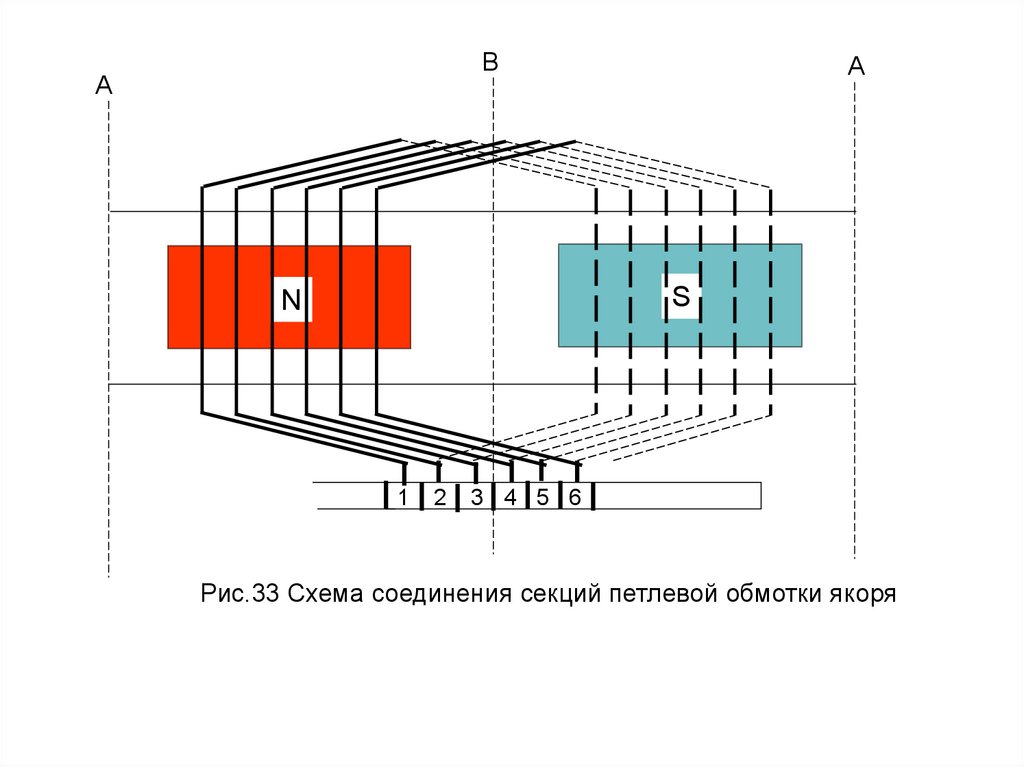
20.
ВА
А
S
N
1
2
3 4 5 6
Рис.33 Схема соединения секций петлевой обмотки якоря
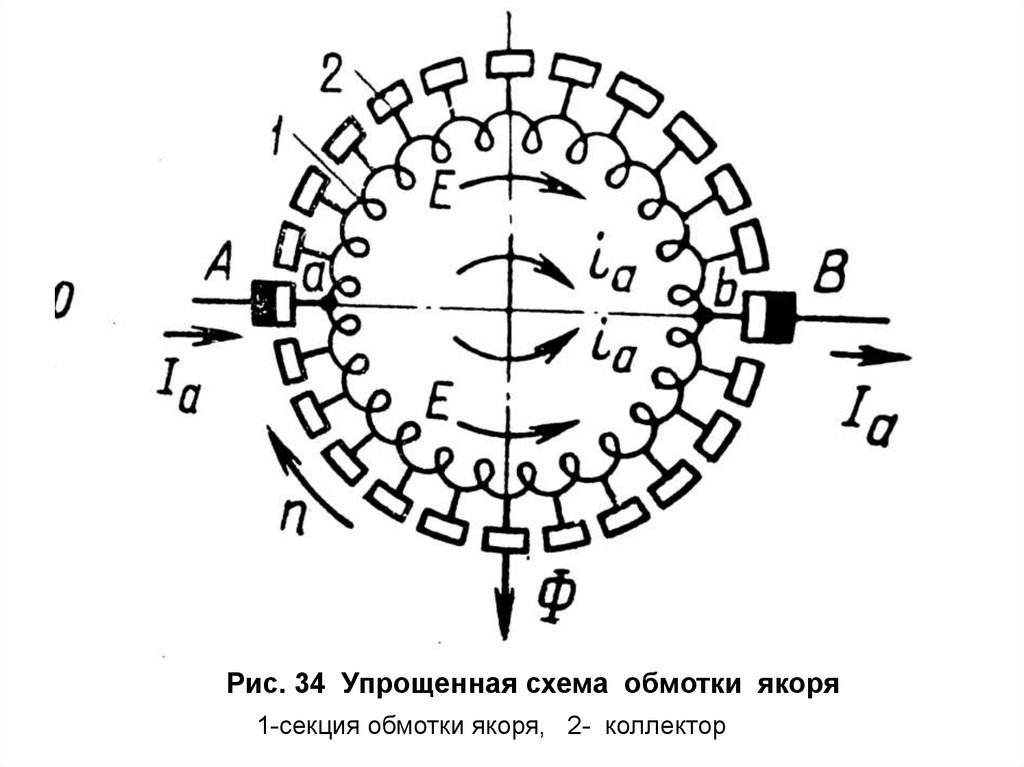
21.
Рис. 34 Упрощенная схема обмотки якоря1-секция обмотки якоря, 2- коллектор
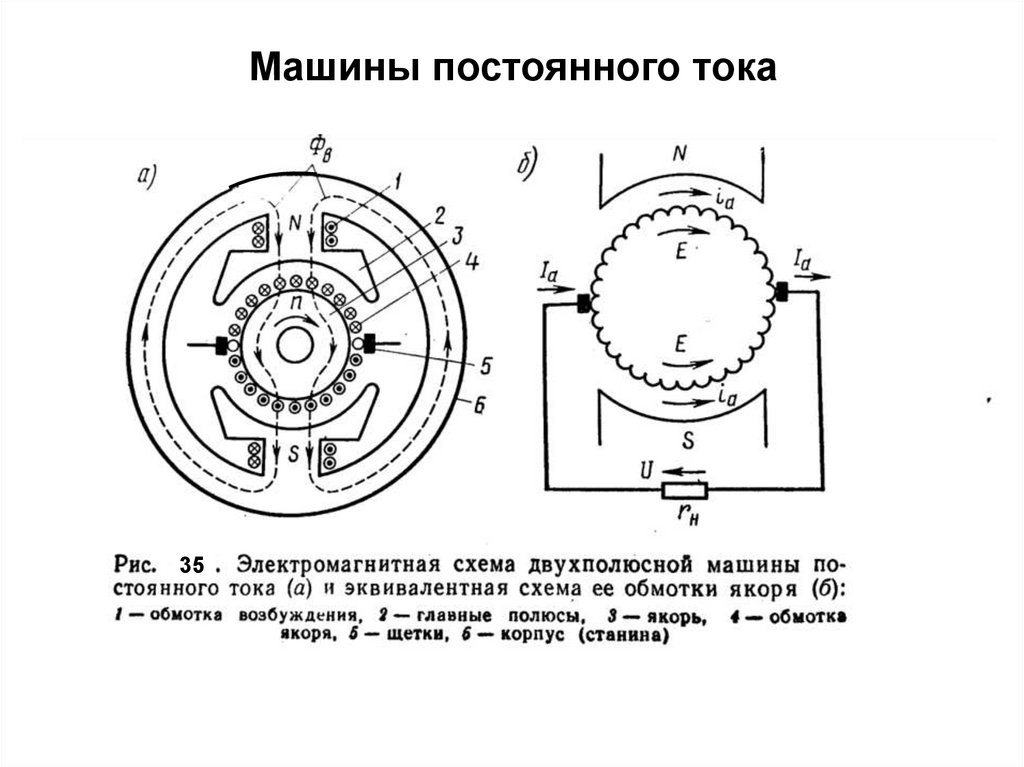
22.
Машины постоянного тока35
23.
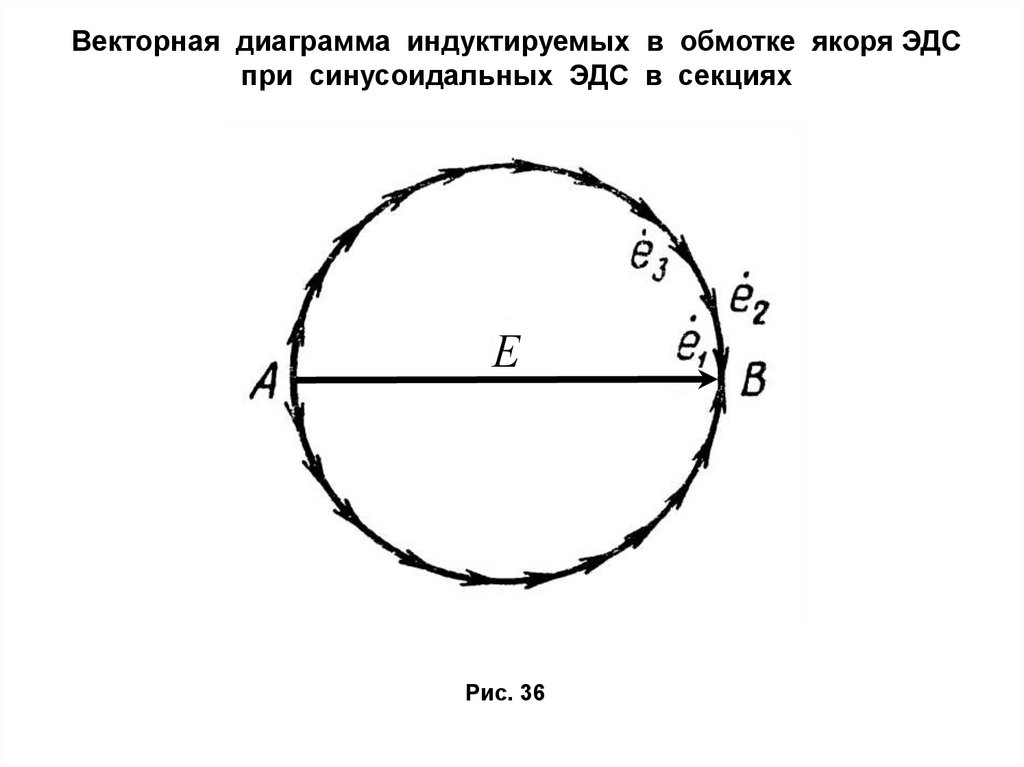
Векторная диаграмма индуктируемых в обмотке якоря ЭДСпри синусоидальных ЭДС в секциях
Е
Рис. 36
24.
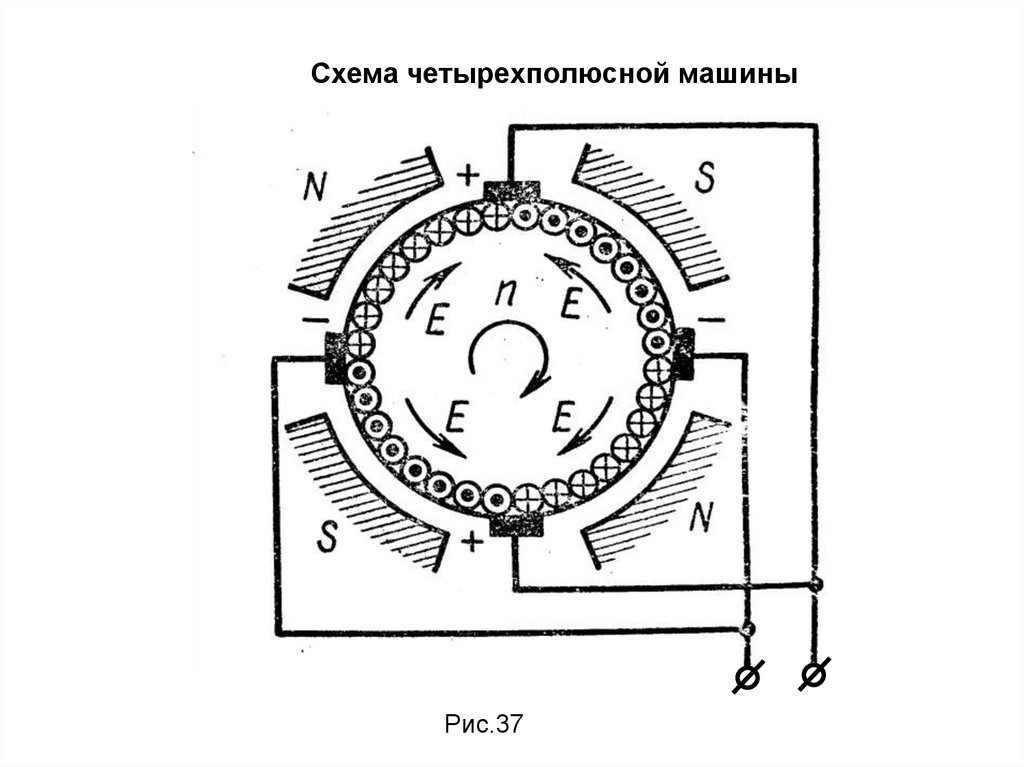
Схема четырехполюсной машиныРис.37
25.
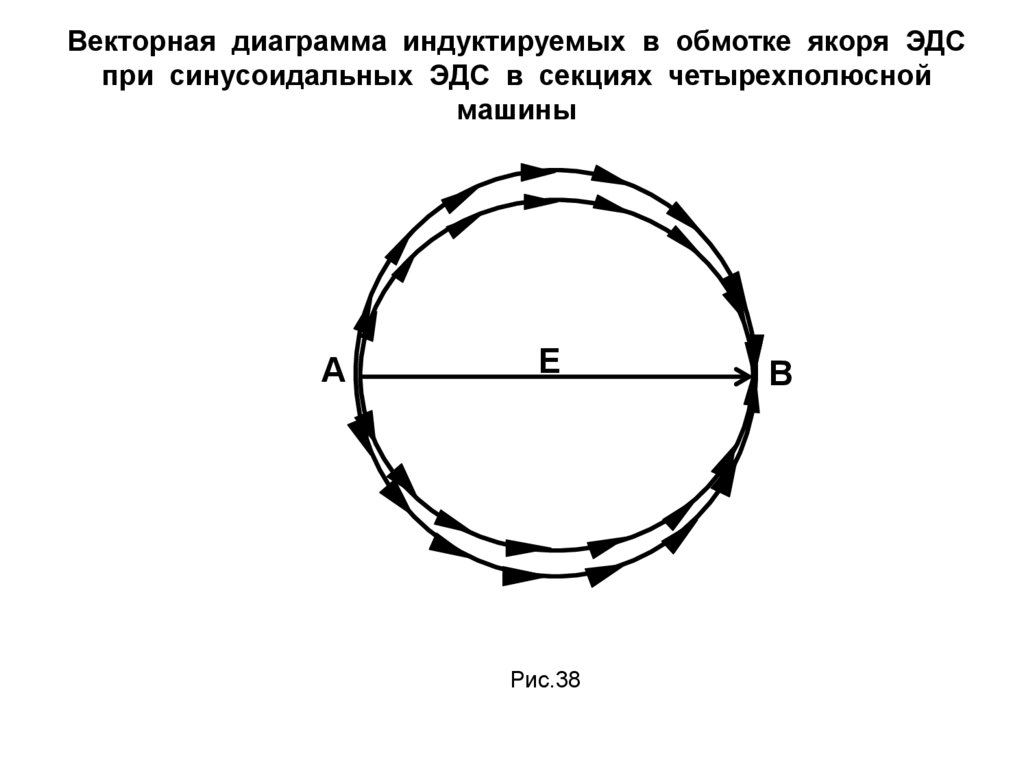
Векторная диаграмма индуктируемых в обмотке якоря ЭДСпри синусоидальных ЭДС в секциях четырехполюсной
машины
А
Е
Рис.38
В
26.
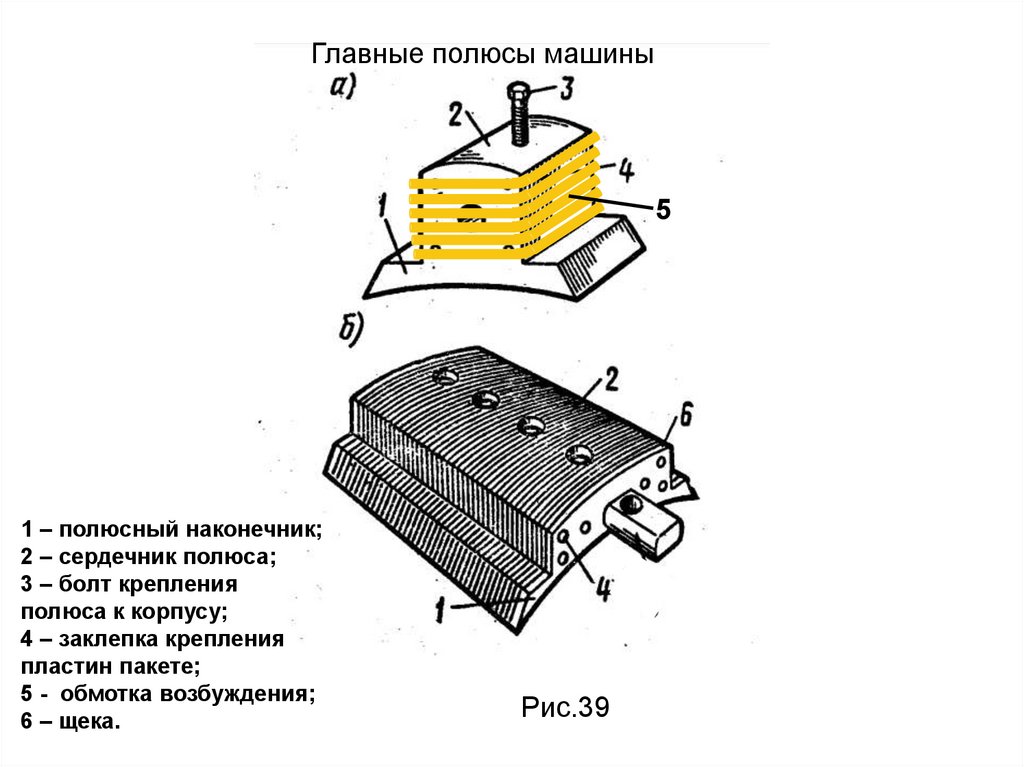
Главные полюсы машины5
1 – полюсный наконечник;
2 – сердечник полюса;
3 – болт крепления
полюса к корпусу;
4 – заклепка крепления
пластин пакете;
5 - обмотка возбуждения;
6 – щека.
Рис.39
27.
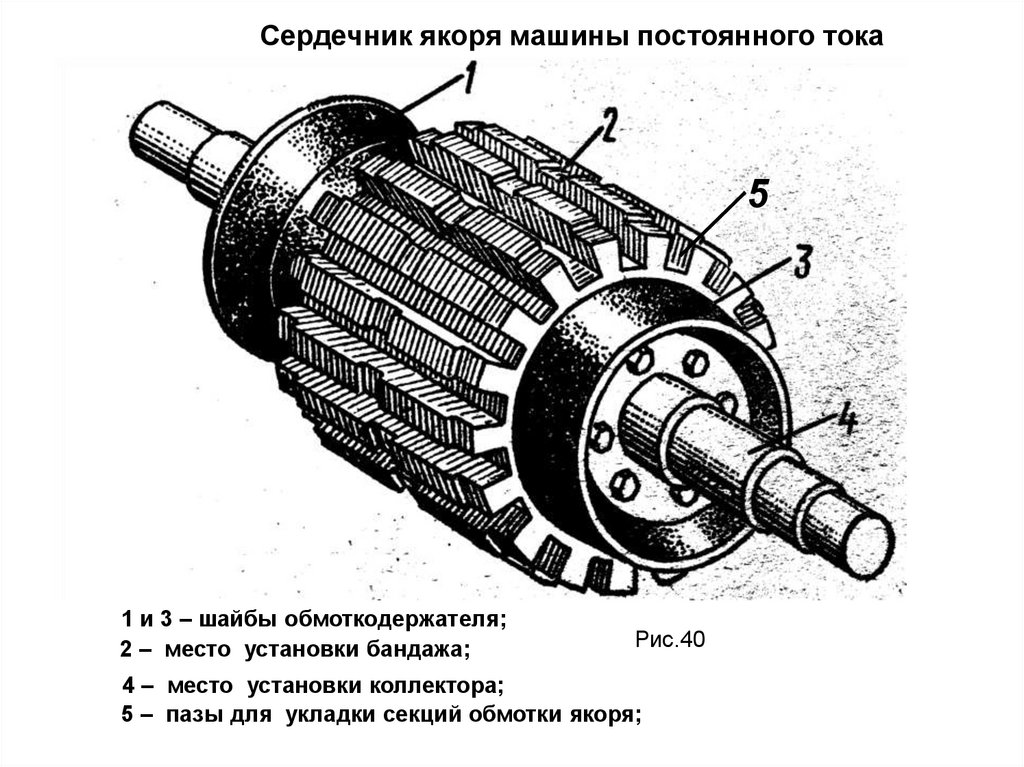
Сердечник якоря машины постоянного тока5
1 и 3 – шайбы обмоткодержателя;
2 – место установки бандажа;
Рис.40
4 – место установки коллектора;
5 – пазы для укладки секций обмотки якоря;
28.
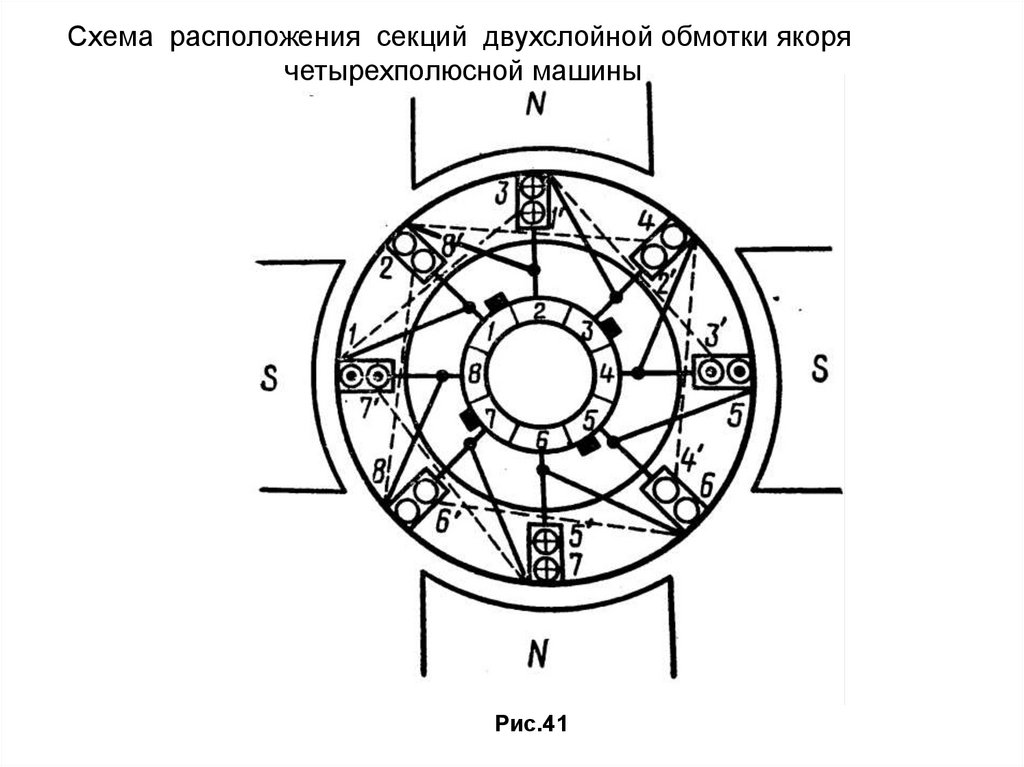
Схема расположения секций двухслойной обмотки якорячетырехполюсной машины
Рис.41
29.
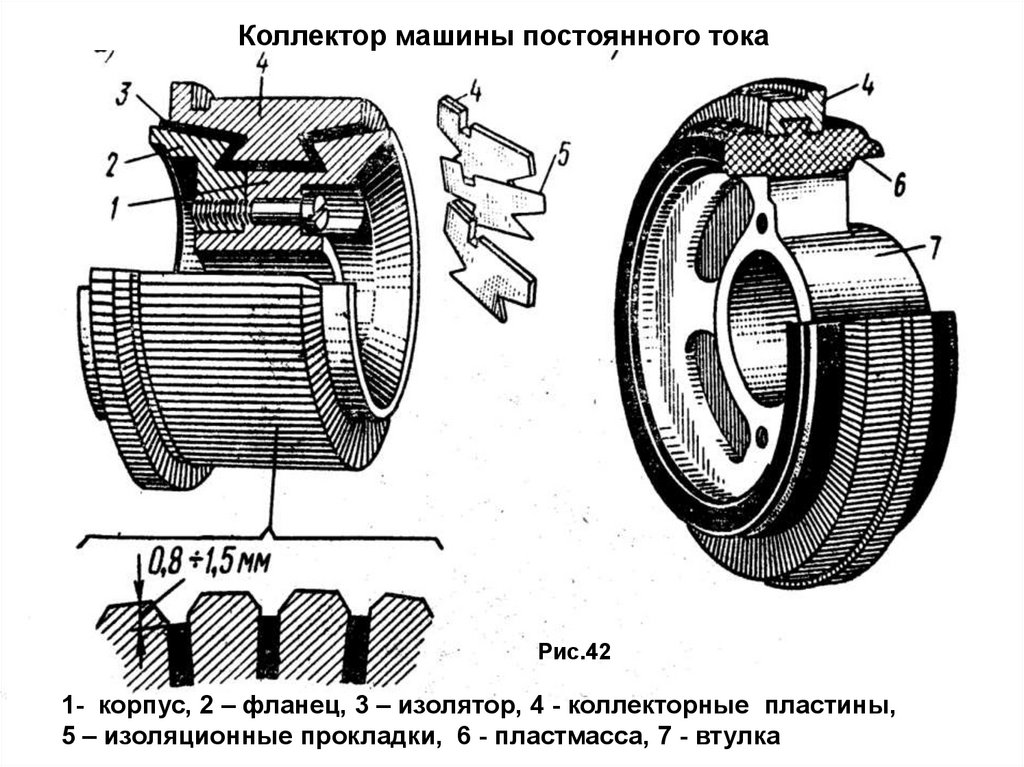
Коллектор машины постоянного токаРис.42
1- корпус, 2 – фланец, 3 – изолятор, 4 - коллекторные пластины,
5 – изоляционные прокладки, 6 - пластмасса, 7 - втулка
30.
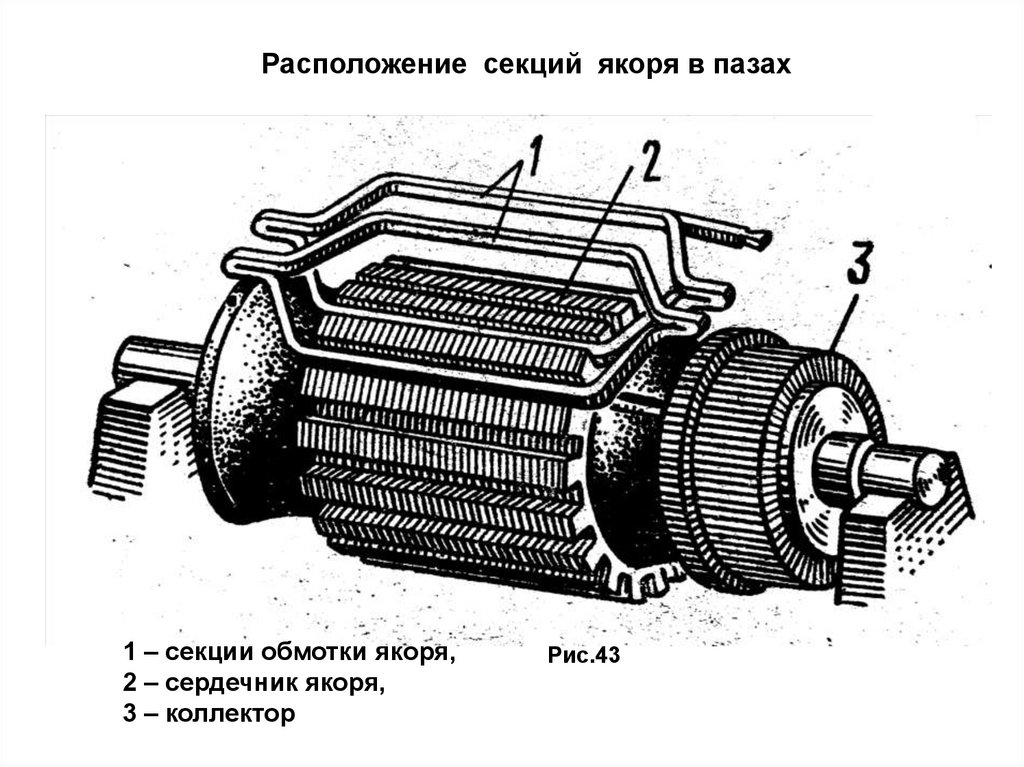
Расположение секций якоря в пазах1 – секции обмотки якоря,
2 – сердечник якоря,
3 – коллектор
Рис.43
31.
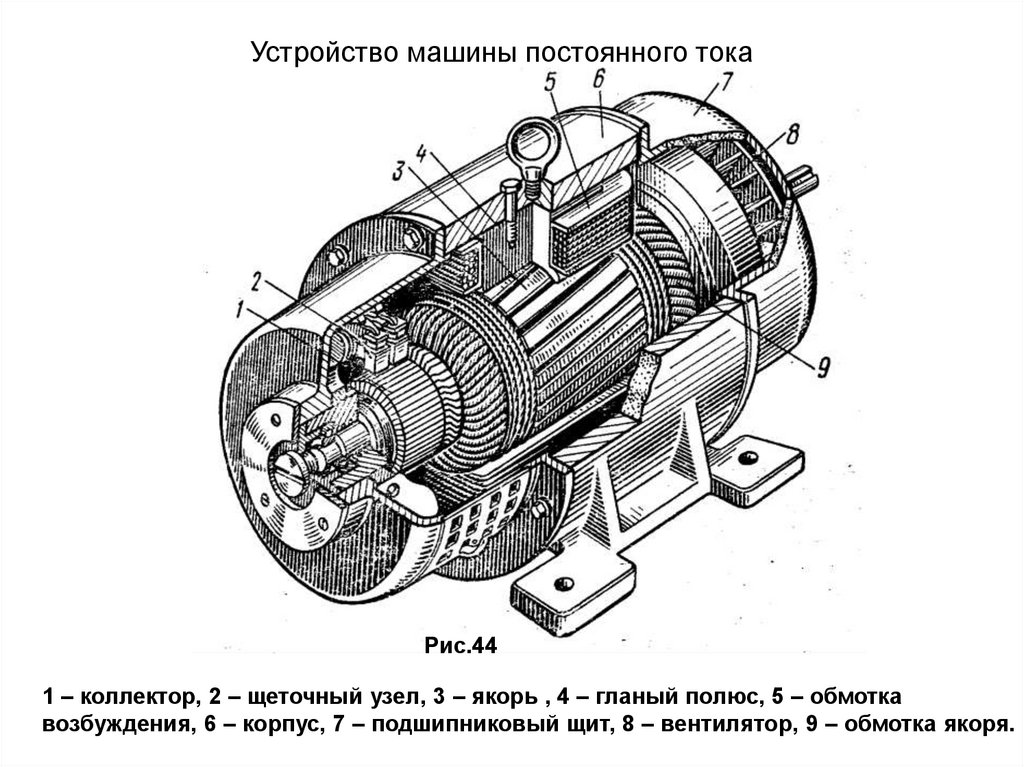
Устройство машины постоянного токаРис.44
1 – коллектор, 2 – щеточный узел, 3 – якорь , 4 – гланый полюс, 5 – обмотка
возбуждения, 6 – корпус, 7 – подшипниковый щит, 8 – вентилятор, 9 – обмотка якоря.
32.
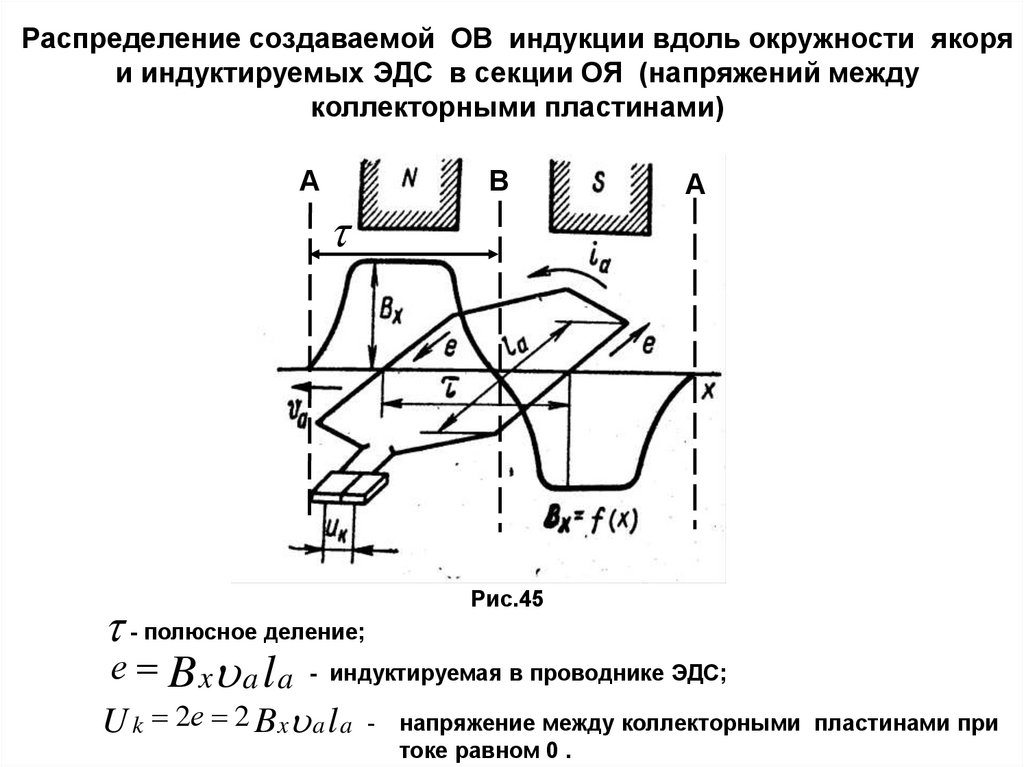
Распределение создаваемой ОВ индукции вдоль окружности якоряи индуктируемых ЭДС в секции ОЯ (напряжений между
коллекторными пластинами)
А
В
А
Рис.45
- полюсное деление;
е B x a l a - индуктируемая в проводнике ЭДС;
U k 2е 2 B x a l a
-
напряжение между коллекторными пластинами при
токе равном 0 .
33.
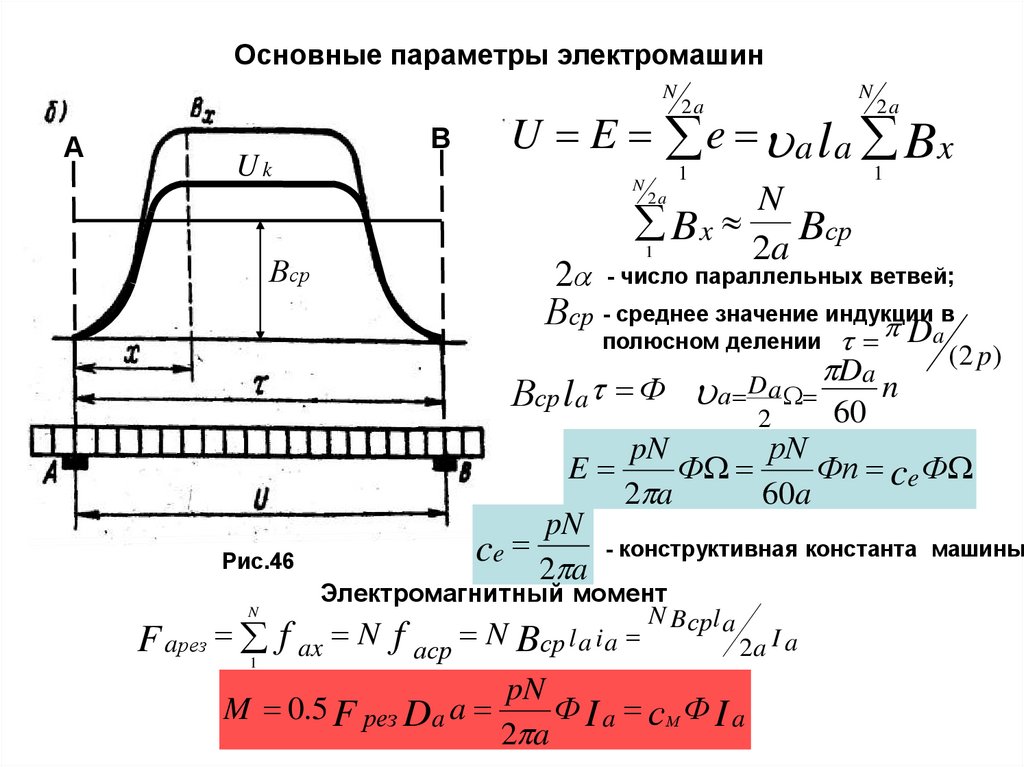
Основные параметры электромашинN
А
В
Uk
2a
U E e a l a Bx
N
1
2a
Bx
Вср
N
2a
2
1
1
N
Bср
2a
- число параллельных ветвей;
Вср - среднее значение индукции
Daв
полюсном делении
Da n
Вср l a Ф а Da 60
2
Рис.46
N
F aрез f
1
(2 p)
pN
рN
E
Ф
Фn ce Ф
2 a
60a
pN
ce 2 a - конструктивная константа машины
Электромагнитный момент
N B срl a
ax N f аср N Bср l a i a
2a I a
pN
M 0.5 F рез Da a
Ф I a сМ Ф I a
2 a
34.
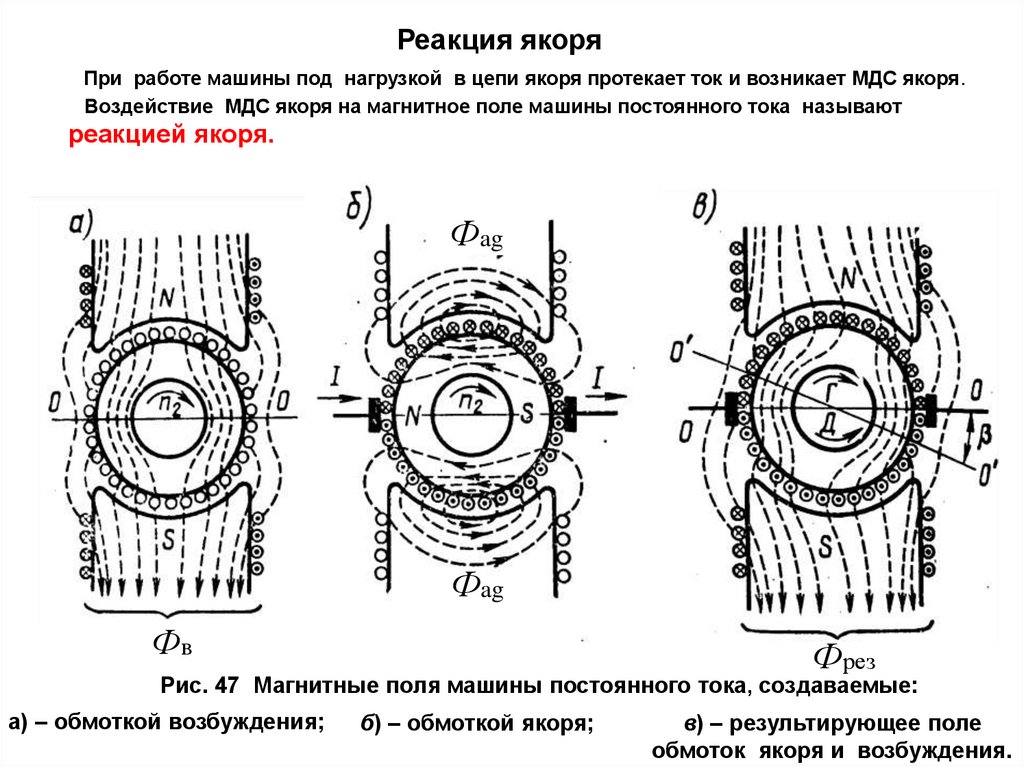
Реакция якоряПри работе машины под нагрузкой в цепи якоря протекает ток и возникает МДС якоря.
Воздействие МДС якоря на магнитное поле машины постоянного тока называют
реакцией якоря.
Фag
Фag
Фв
Фрез
Рис. 47 Магнитные поля машины постоянного тока, создаваемые:
а) – обмоткой возбуждения;
б) – обмоткой якоря;
в) – результирующее поле
обмоток якоря и возбуждения.
35.
Магнитное поле реакции якоря действует по поперечной оси машины, поэтому егоназывают поперечным полем. Оно оказывает двойное воздействие на поле машины.
1 - искажает симметричное распределение поля машины относительно главных
полюсов и смещает физическую нейтраль ( о о ) относительно геометрической
нейтрали ( о о );
Кривые распределения магнитной
индукции в воздушном зазоре МПТ
создаваемой:
а) – обмоткой возбуждения;
б) – обмоткой якоря;
Вмакс
в) – обмотками якоря и
возбуждения.
Рис.48
36.
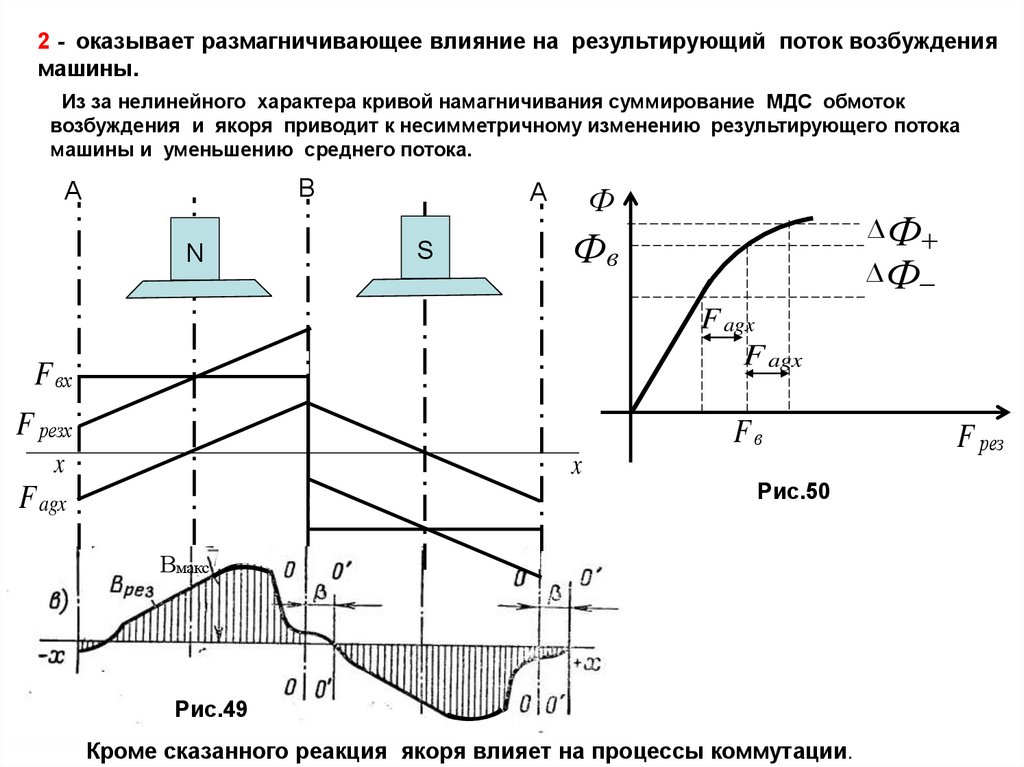
2 - оказывает размагничивающее влияние на результирующий поток возбуждениямашины.
Из за нелинейного характера кривой намагничивания суммирование МДС обмоток
возбуждения и якоря приводит к несимметричному изменению результирующего потока
машины и уменьшению среднего потока.
B
A
N
Ф
A
S
Ф
Фв
Ф
F agx
F agx
F вx
F резx
Fв
x
x
F agx
Рис.50
Вмакс
Рис.49
Кроме сказанного реакция якоря влияет на процессы коммутации.
F рез
37.
КоммутацияПод коммутацией понимают процесс изменения тока в секциях ОЯ при переходе их из
одной параллельной ветви в другую, а часто и все процессы, возникающие под щетками
коллекторных машин. В том числе искрение щеток и круговой огонь на коллекторе.
Причин возникновения искрения несколько:
Мехнические - биение, элептичность и шероховатость поверхности коллектора,
наличие выступающих коллекторных пластин, вибрация щеток и т.п.
Электромагнитные – разрыв электрической цепи с током при выходе коллекторной
пластины из-под щетки, что приводит к возникновению короткой электрической дуги.
Дуга между соседними пластинами может перерасти в круговой огонь на
коллекторе, так как при дуге появляются раскаленные пары меди и происходит
ионизация воздуха.
Реакция якоря искажает магнитное поле в воздушном зазоре машины, увеличивая
магнитную индукцию под одним из краев главных полюсов. Это вызывает увеличение
напряжения U k между соседними пластинами и опасность возникновения искрения
и кругового огня.
При вращении якоря секции переходят из одной параллельной ветви в другую, и
направление тока в них меняется на противоположное. Это осуществляется за счет
коммутации, которая должна быть безискровой.
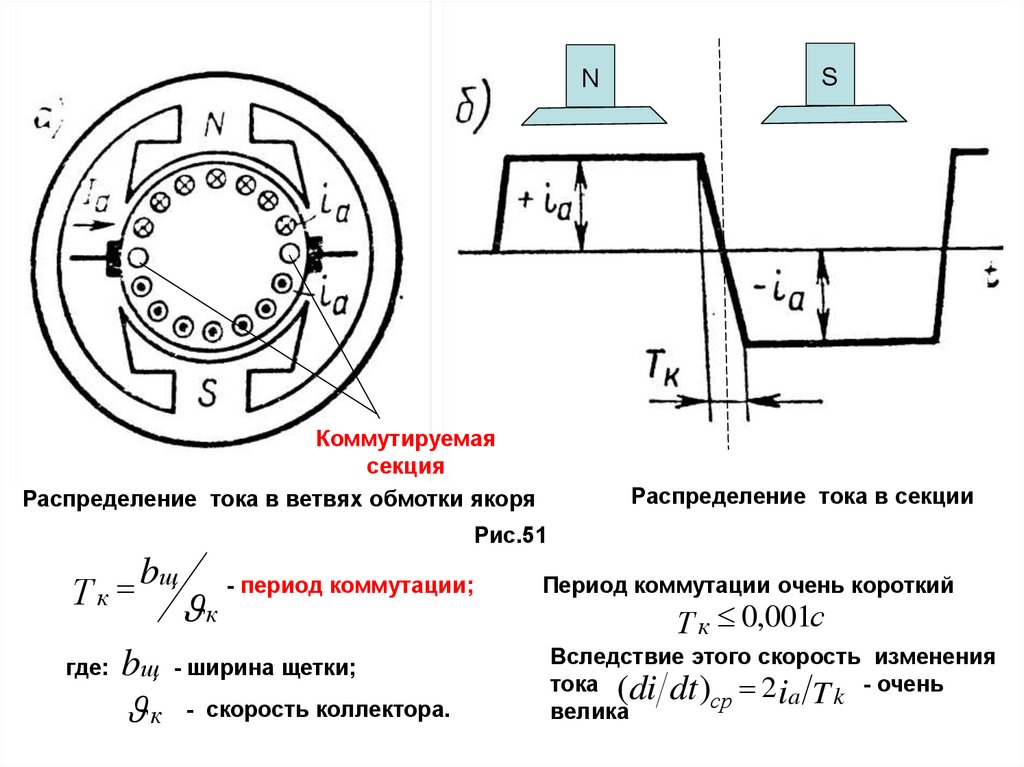
Секции в которых происходит изменение тока находятся под щетками, и их называют
коммутируемыми, а время замыкания секции щеткой – периодом коммутации.
38.
NКоммутируемая
секция
Распределение тока в ветвях обмотки якоря
S
Распределение тока в секции
Рис.51
bщ
Тк
где:
bщ
к
к
- период коммутации;
- ширина щетки;
- скорость коллектора.
Период коммутации очень короткий
Т к 0,001с
Вследствие этого скорость изменения
тока (di dt ) 2
- очень
i
a Tk
ср
велика
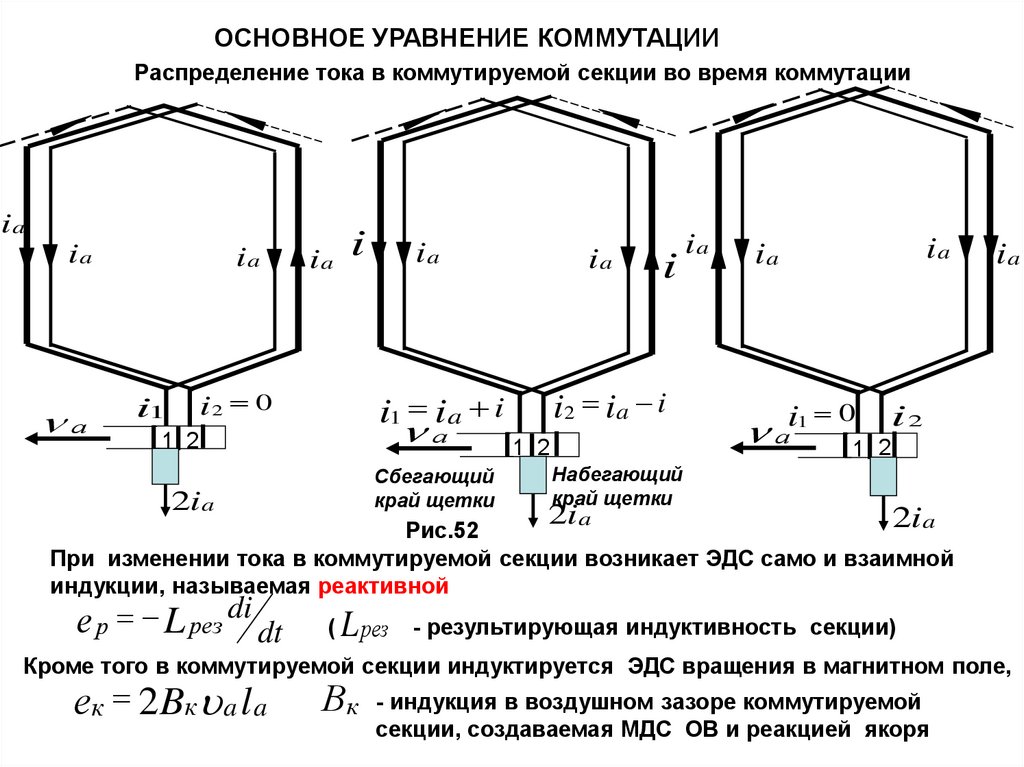
39.
ОСНОВНОЕ УРАВНЕНИЕ КОММУТАЦИИРаспределение тока в коммутируемой секции во время коммутации
ia
ia
а
ia
ia
i
ia
i
i1 ia i i2 ia i
а
1 2
i2 0
i1
ia
1 2
Сбегающий
край щетки
2i a
ia
ia
ia
аi1
0
ia
i2
1 2
Набегающий
край щетки
2i a
2ia
Рис.52
При изменении тока в коммутируемой секции возникает ЭДС само и взаимной
индукции, называемая реактивной
е р L рез di dt
(
L рез
- результирующая индуктивность секции)
Кроме того в коммутируемой секции индуктируется ЭДС вращения в магнитном поле,
ек 2Bк a l a
Вк
- индукция в воздушном зазоре коммутируемой
секции, создаваемая МДС ОВ и реакцией якоря
40.
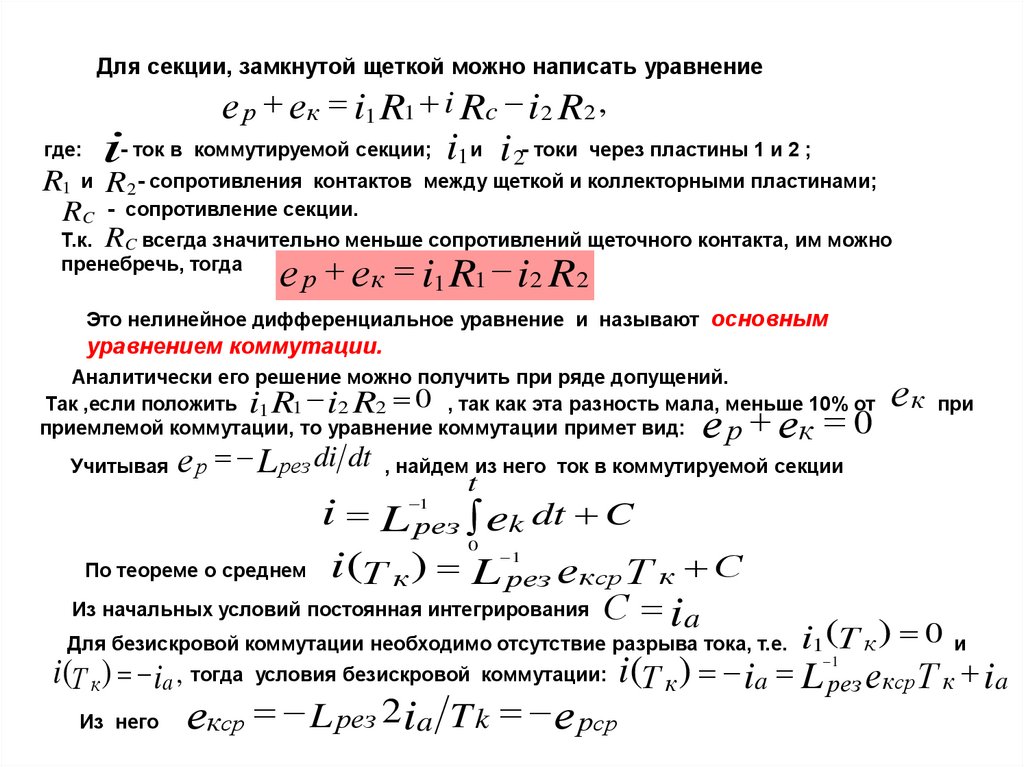
Для секции, замкнутой щеткой можно написать уравнениегде:
е р ек i1 R1 i Rc i2 R2 ,
i- ток в коммутируемой секции; i1 и i 2- токи через пластины 1 и 2 ;
R1 и R2 - сопротивления контактов между щеткой и коллекторными пластинами;
RC - сопротивление секции.
Т.к. RC всегда значительно меньше сопротивлений щеточного контакта, им можно
пренебречь, тогда
е р ек i1 R1 i2 R2
Это нелинейное дифференциальное уравнение и называют основным
уравнением коммутации.
Аналитически его решение можно получить при ряде допущений.
Так ,если положить 1 1 2 2 0 , так как эта разность мала, меньше 10% от
приемлемой коммутации, то уравнение коммутации примет вид:
р
к
iR i R
Учитывая
е р L рез di dt
е
t
i L рез ek dt C
i(Т к ) L рез екср Т к С
0
1
Из начальных условий постоянная интегрирования
С ia
Для безискровой коммутации необходимо отсутствие разрыва тока, т.е.
i(Т к ) ia , тогда
Из него
при
, найдем из него ток в коммутируемой секции
1
По теореме о среднем
е 0
ек
условия безискровой коммутации:
екср L рез 2 ia T k е рср
i1 (Т к ) 0
и
i(Т к ) ia L рез екср Т к ia
1
41.
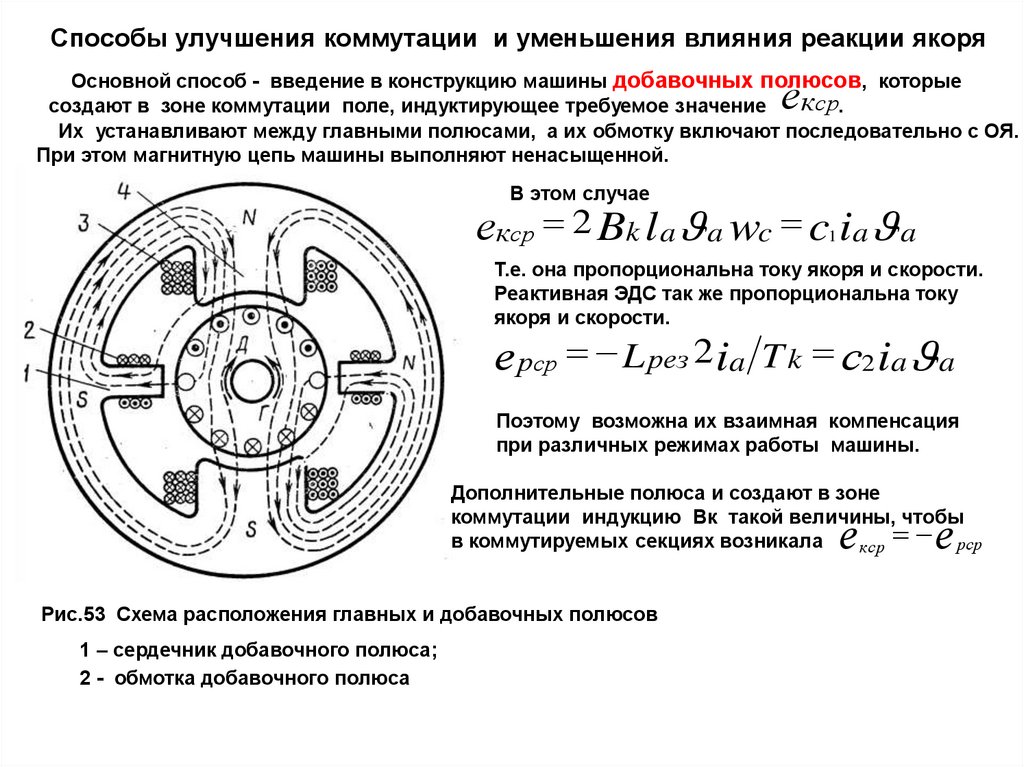
Способы улучшения коммутации и уменьшения влияния реакции якоряОсновной способ - введение в конструкцию машины добавочных полюсов, которые
кср.
создают в зоне коммутации поле, индуктирующее требуемое значение
Их устанавливают между главными полюсами, а их обмотку включают последовательно с ОЯ.
При этом магнитную цепь машины выполняют ненасыщенной.
е
В этом случае
екср 2 Bk l a a wc c ia a
1
Т.е. она пропорциональна току якоря и скорости.
Реактивная ЭДС так же пропорциональна току
якоря и скорости.
е рср L рез 2 ia T k с2 ia a
Поэтому возможна их взаимная компенсация
при различных режимах работы машины.
Дополнительные полюса и создают в зоне
коммутации индукцию Вк такой величины, чтобы
рср
в коммутируемых секциях возникала
кср
е
Рис.53 Схема расположения главных и добавочных полюсов
1 – сердечник добавочного полюса;
2 - обмотка добавочного полюса
е
42.
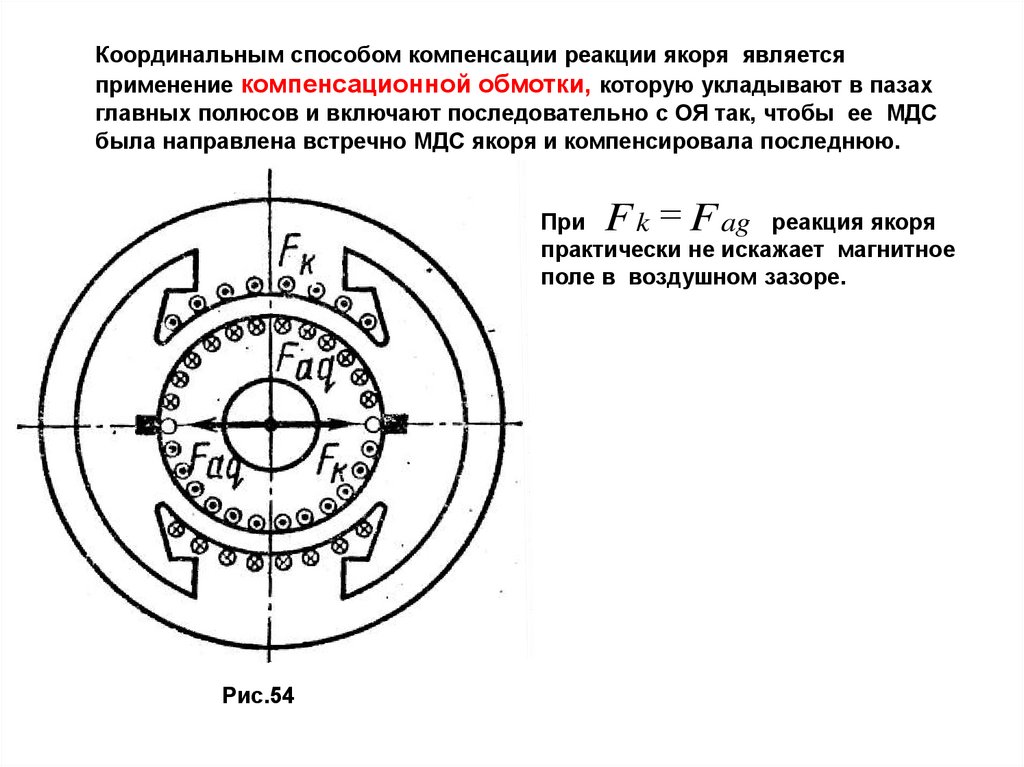
Координальным способом компенсации реакции якоря являетсяприменение компенсационной обмотки, которую укладывают в пазах
главных полюсов и включают последовательно с ОЯ так, чтобы ее МДС
была направлена встречно МДС якоря и компенсировала последнюю.
При
k ag реакция якоря
практически не искажает магнитное
поле в воздушном зазоре.
F
Рис.54
F
43.
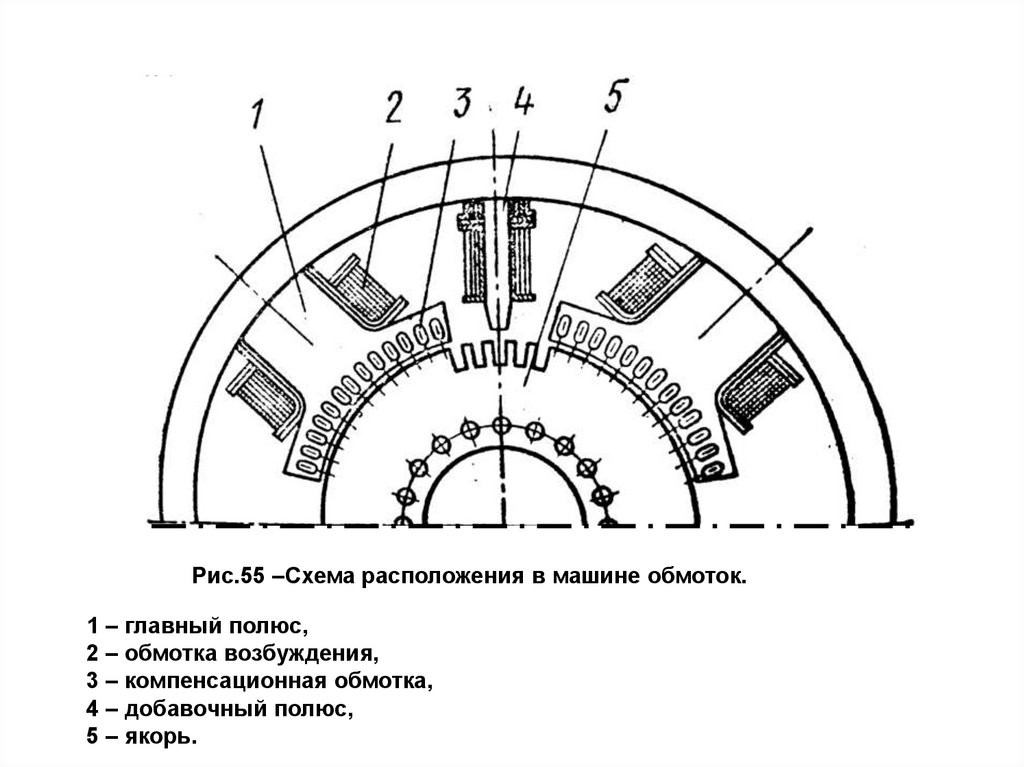
Рис.55 –Схема расположения в машине обмоток.1 – главный полюс,
2 – обмотка возбуждения,
3 – компенсационная обмотка,
4 – добавочный полюс,
5 – якорь.
44.
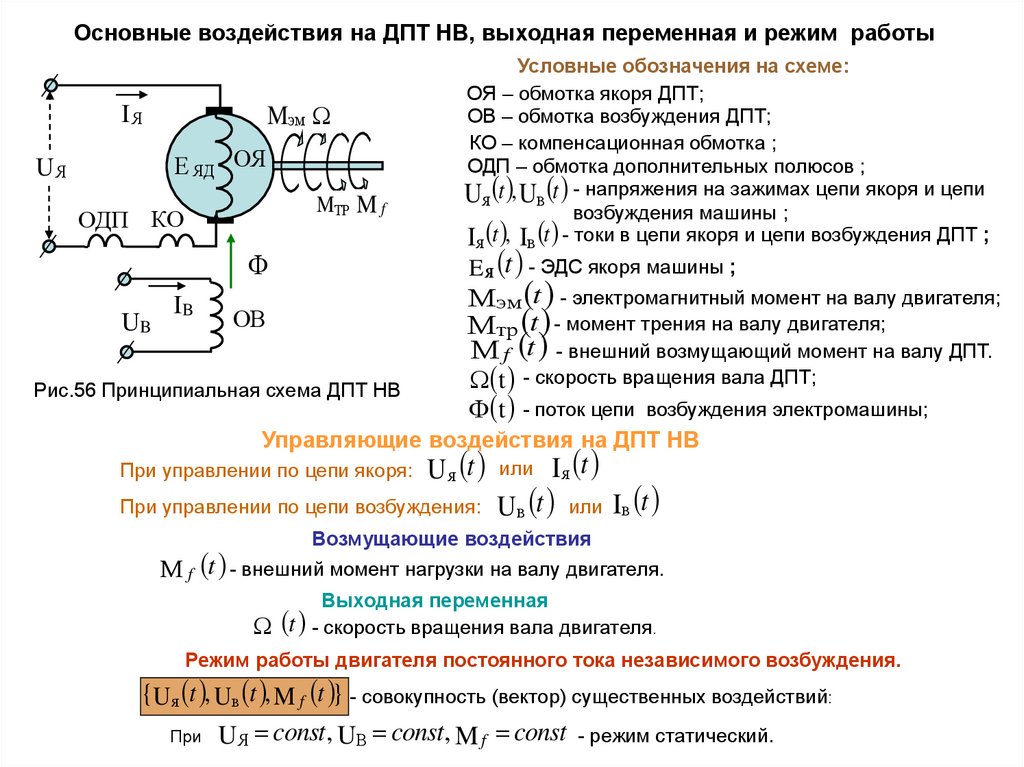
Основные воздействия на ДПТ НВ, выходная переменная и режим работыMэм
IЯ
E ЯД ОЯ
UЯ
MТР M f
ОДП КО
Ф
UB
IB
ОВ
Рис.56 Принципиальная схема ДПТ НВ
Условные обозначения на схеме:
ОЯ – обмотка якоря ДПТ;
ОВ – обмотка возбуждения ДПТ;
КО – компенсационная обмотка ;
ОДП – обмотка дополнительных полюсов ;
Uя t , Uв t - напряжения на зажимах цепи якоря и цепи
возбуждения машины ;
Iя t , Iв t - токи в цепи якоря и цепи возбуждения ДПТ ;
E я t - ЭДС якоря машины ;
Мэм t - электромагнитный момент на валу двигателя;
М тр t - момент трения на валу двигателя;
М f t - внешний возмущающий момент на валу ДПТ.
t - скорость вращения вала ДПТ;
Ф t - поток цепи возбуждения электромашины;
Управляющие воздействия на ДПТ НВ
При управлении по цепи якоря:
U я t
При управлении по цепи возбуждения:
или
Iя t
Uв t
или Iв
t
Возмущающие воздействия
М f t - внешний момент нагрузки на валу двигателя.
Выходная переменная
t - скорость вращения вала двигателя.
Режим работы двигателя постоянного тока независимого возбуждения.
{U я t , Uв t , M f t } - совокупность (вектор) существенных воздействий:
При UЯ const , UВ const , M f const - режим статический.
45.
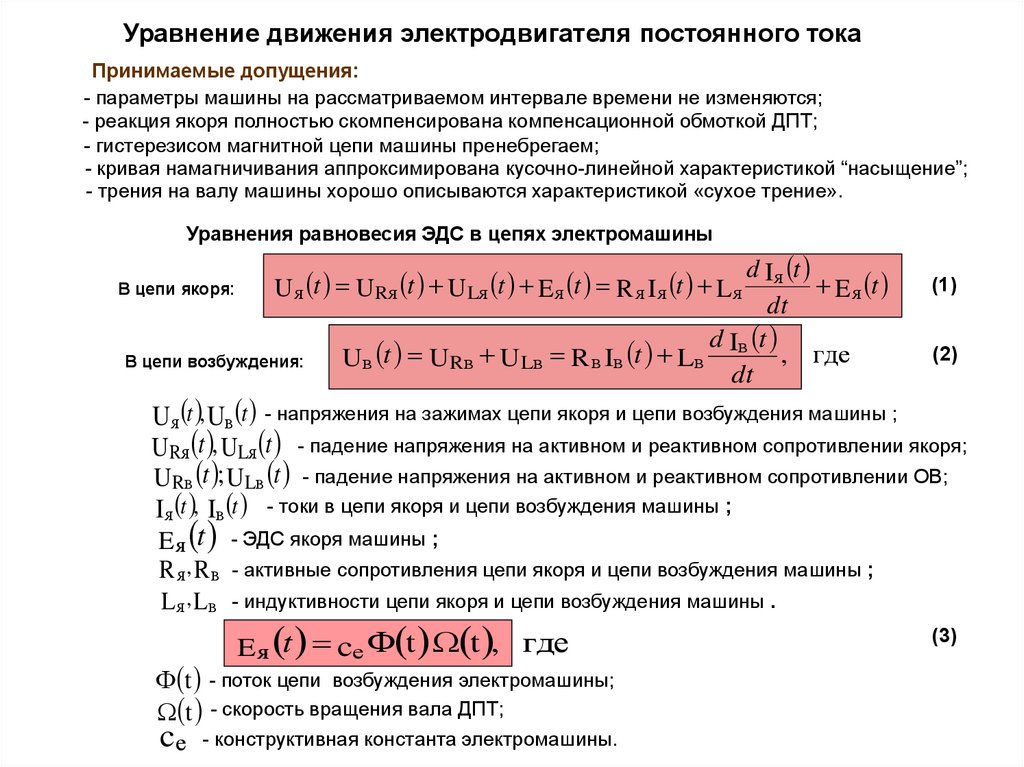
Уравнение движения электродвигателя постоянного токаПринимаемые допущения:
- параметры машины на рассматриваемом интервале времени не изменяются;
- реакция якоря полностью скомпенсирована компенсационной обмоткой ДПТ;
- гистерезисом магнитной цепи машины пренебрегаем;
- кривая намагничивания аппроксимирована кусочно-линейной характеристикой “насыщение”;
- трения на валу машины хорошо описываются характеристикой «сухое трение».
Уравнения равновесия ЭДС в цепях электромашины
В цепи якоря:
d I я t
t
t
t
t
t
E я t
Uя
U Rя
U Lя
Eя
R я Iя
Lя
dt
В цепи возбуждения:
Uв t U Rв U Lв R в Iв t Lв
d Iв t
, где
dt
(1)
(2)
Uя t , Uв t - напряжения на зажимах цепи якоря и цепи возбуждения машины ;
URя t , ULя t - падение напряжения на активном и реактивном сопротивлении якоря;
URв t ; ULв t - падение напряжения на активном и реактивном сопротивлении ОВ;
Iя t , Iв t - токи в цепи якоря и цепи возбуждения машины ;
E я t
R я,Rв
L я , Lв
- ЭДС якоря машины ;
- активные сопротивления цепи якоря и цепи возбуждения машины ;
- индуктивности цепи якоря и цепи возбуждения машины .
E я t cе Ф t t , где
Ф t - поток цепи возбуждения электромашины;
t - скорость вращения вала ДПТ;
cе - конструктивная константа электромашины.
(3)
46.
Уравнение магнитной цепи электродвигателяФ
Ф t
Фнас
-Iв нас
Iв нас
Iв
-Фнас
Iв t
при
Iв t Iв нас
Фнас Sign Iв t при Iв t Iв нас
(4)
Фнас - поток насыщения магнитной цепи ДПТ;
Iв нас - ток возбуждения насыщения магнитной цепи ДПТ;
- тангенс угла наклона линейного участка кривой.
Рис.57 Кривая намагничивания магнитной цепи ДПТ при принятых допущениях
Уравнение моментов на валу электродвигателя
М эм t М f t М тр t М дин t 0, где
(5)
Мэм t - электромагнитный момент на валу двигателя;
М f t - внешний возмущающий момент на валу двигателя;
М тр t - момент трения на валу двигателя;
Мдин t - динамический момент вала двигателя.
М эм t См Ф t Iя t ,
М тр
(6)
См - конструктивная константа ДПТ НВ,
Мтрс
д
-Мтрс
Мдин t J д t J д
d t
,
dt
(7)
J д - момент инерции подвижных частей двигателя;
t - угловое ускорение вала двигателя.
Рис.58 Характеристика сухих трений на валу двигателя.
при 0
М трс t Sign
М тр t Мэм t М f t при 0 и Мэм t М f t Мтрс
Мтрс Sign (Мэм t М f t ) при 0 и Мэм t М f t Мтрс
(8)
47.
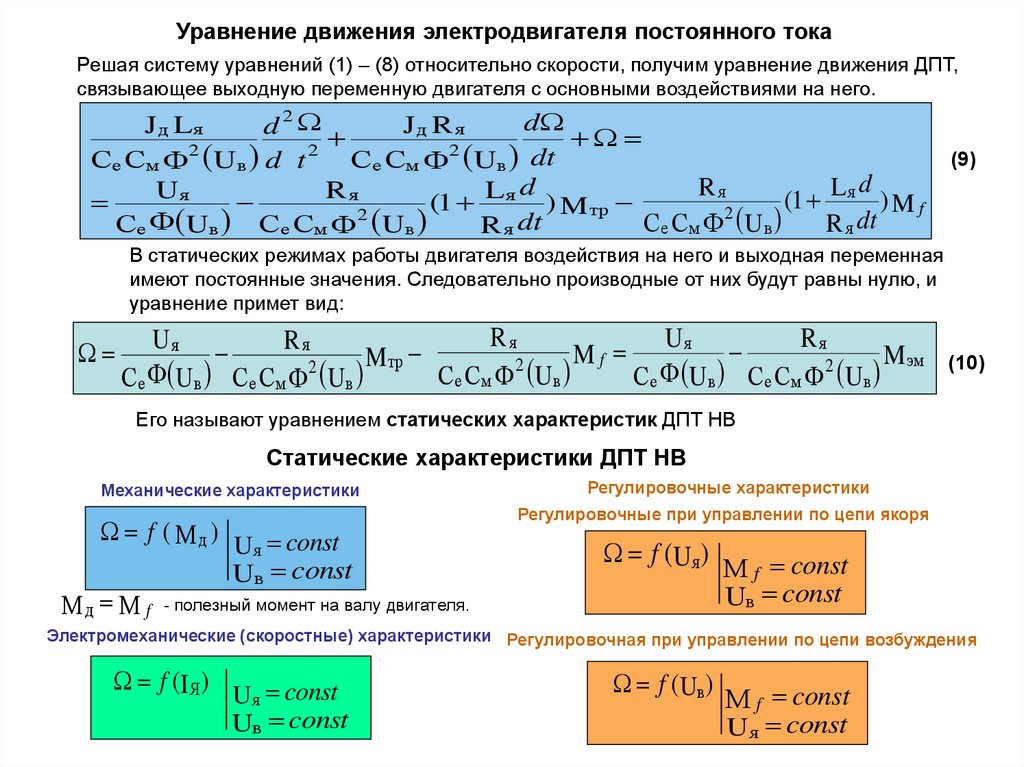
Уравнение движения электродвигателя постоянного токаРешая систему уравнений (1) – (8) относительно скорости, получим уравнение движения ДПТ,
связывающее выходную переменную двигателя с основными воздействиями на него.
2
d
J д Lя
Jд R я
d
2
2
2
Се См Ф Uв d t
Се См Ф Uв dt
Rя
Lя d )
U
R
L
я
яd
я
(
1
(1
) M тр
Mf
2
2
dt
Ф
dt
С
С
U
Ф
R
Се
Uв
Се См Ф Uв
Rя
я
е м
в
(9)
В статических режимах работы двигателя воздействия на него и выходная переменная
имеют постоянные значения. Следовательно производные от них будут равны нулю, и
уравнение примет вид:
Rя
Uя
Rя
Uя
Rя
M
M эм
f
M
тр
2
2
2
Ф
Ф
С
С
U
Ф
С
U
С
С
U
Ф
е м
в
Се U в С е С м Ф U в
е
в
е м
в
(10)
Его называют уравнением статических характеристик ДПТ НВ
Статические характеристики ДПТ НВ
Механические характеристики
f ( Mд )
Uя const
Uв const
M д М f - полезный момент на валу двигателя.
Регулировочные характеристики
Регулировочные при управлении по цепи якоря
f ( Uя)
M f const
Uв const
Электромеханические (скоростные) характеристики Регулировочная при управлении по цепи возбуждения
f (I Я )
Uя const
Uв const
f ( Uв )
M f const
Uя const
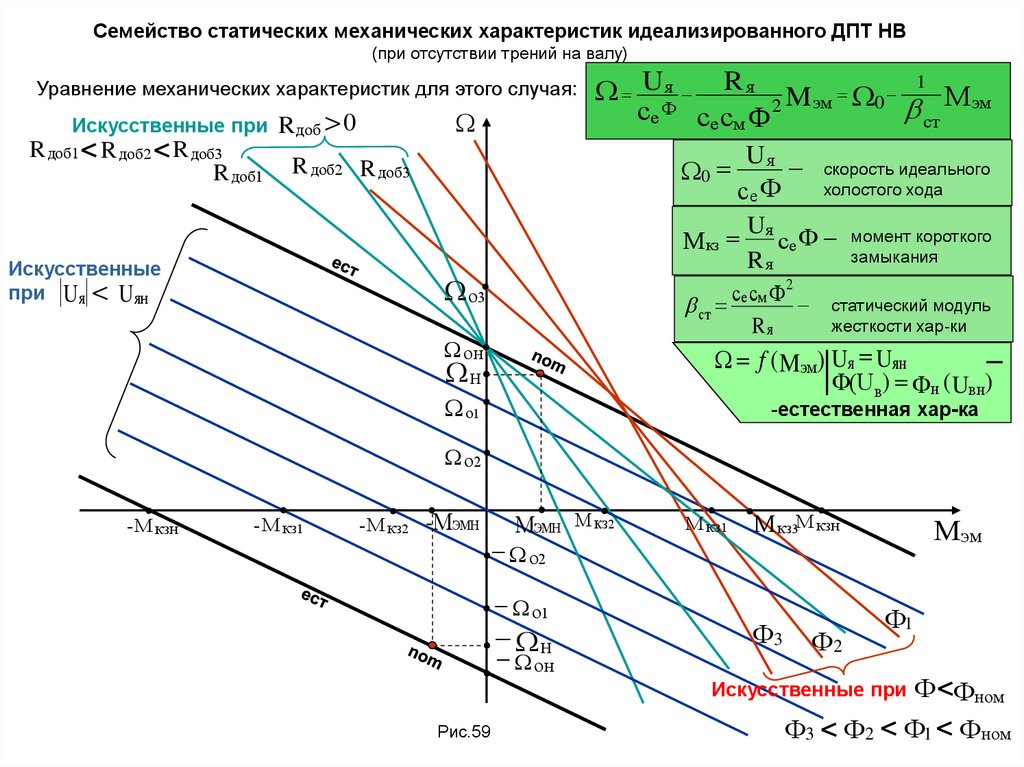
48.
Семейство статических механических характеристик идеализированного ДПТ НВ(при отсутствии трений на валу)
Уравнение механических характеристик для этого случая:
Искусственные при
R доб1 R доб2 R доб3
R доб1
R доб 0
U я R я 2 Mэм 0 1 Мэм
ст
се Ф се см Ф
0
R доб2 R доб3
Uя
се Ф
Мкз
Искусственные
при U я
U ян
о3
скорость идеального
холостого хода
Uя Ф
се
Rя
момент короткого
замыкания
2
сс
ст е м Ф
Rя
он
статический модуль
жесткости хар-ки
f (Mэм) Uя Uян
Н
Ф(U в) Фн ( Uвн)
о1
-естественная хар-ка
о2
- М кзн
- М кз1
- М кз2
-МЭМН
МЭМН М кз2
о2
о1
Н
он
М кз1
М кз3М кзн
Ф3
Мэм
Ф1
Ф2
Ф Фном
Ф1 Фном
Искусственные при
Рис.59
Ф3
Ф2
49.
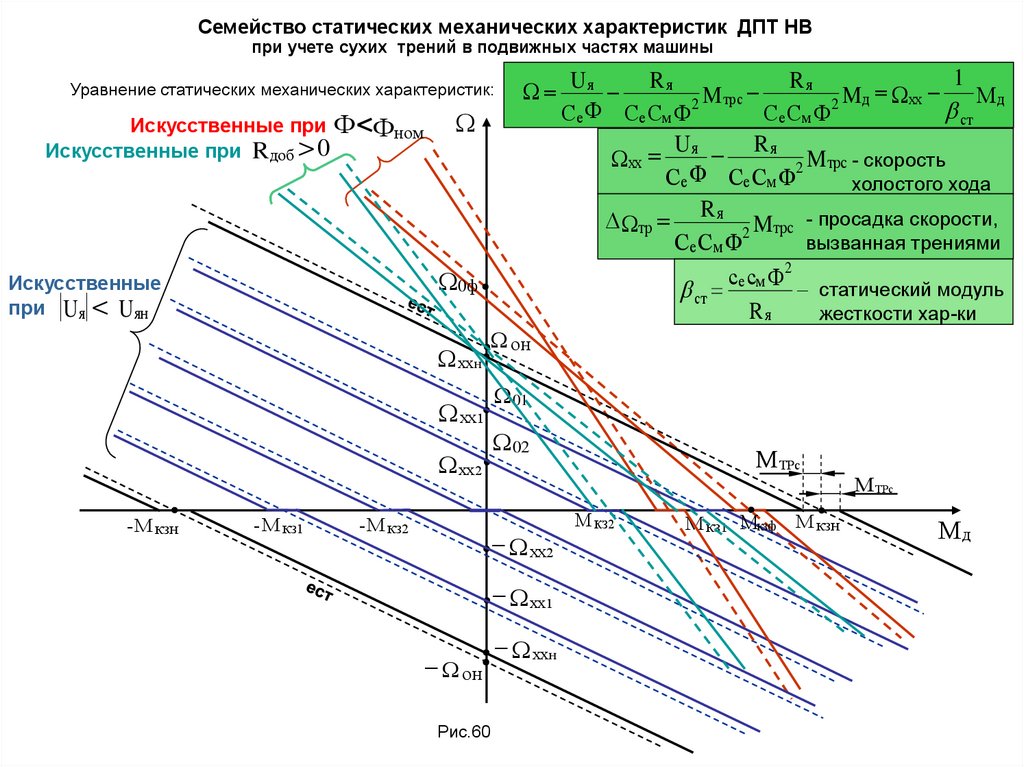
Семейство статических механических характеристик ДПТ НВпри учете сухих трений в подвижных частях машины
Уравнение статических механических характеристик:
Искусственные при Ф
Искусственные при R доб 0
Фном
0ф
Искусственные
при U я
U ян
ххн
он
хх1
хх2
- М кзн
- М кз1
1
U я R я 2 M трс R я 2 Mд хх
Мд
ст
Се Ф Се См Ф
Се См Ф
Uя R я
хх
Mтрс - скорость
Се Ф Се См Ф2
холостого хода
тр R я 2 Mтрс - просадка скорости,
вызванная трениями
Се См Ф
2
с
е см Ф
статический модуль
ст
Rя
жесткости хар-ки
- М кз2
01
02
хх2
хх1
он
Рис.60
ххн
М ТРс
М кз2
М кз1 Мкзф М кзн
М ТРс
Мд
50.
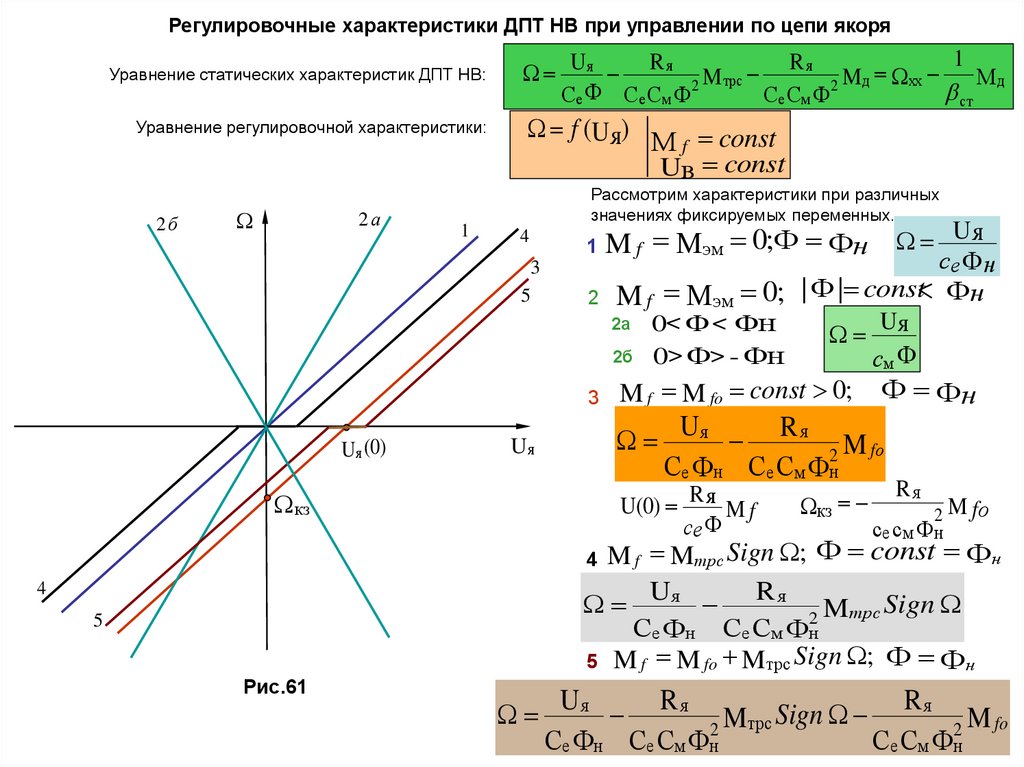
Регулировочные характеристики ДПТ НВ при управлении по цепи якоряУравнение статических характеристик ДПТ НВ:
Уравнение регулировочной характеристики:
2б
2а
1
1
U я R я 2 M трс R я 2 Mд хх
Мд
ст
Се Ф Се См Ф
Се См Ф
f (Uя) M const
f
Uв const
Рассмотрим характеристики при различных
значениях фиксируемых переменных.
4
1
3
5
2
3
Uя (0)
M f Мэм 0;Ф Фн Uя
се Ф н
M f Мэм 0; | Ф | const Фн
U
2а 0 Ф Фн
я
2б 0 Ф - Фн
см Ф
M f M fo const 0; Ф Фн
Uя R я 2 M fо
Се Фн Се См Фн
Uя
U(0) R я M f
се Ф
кз
кз
Rя
2 M fо
се см Фн
M f Mтрc Sign ; Ф const Фн
Uя R я 2 Mтрс Sign
Се Фн Се См Фн
5 M f M fo M трс Sign ; Ф Фн
4
4
5
Рис.61
Uя R я 2 Mтрс Sign R я 2 M fo
Се Фн Се См Фн
Се См Фн
51.
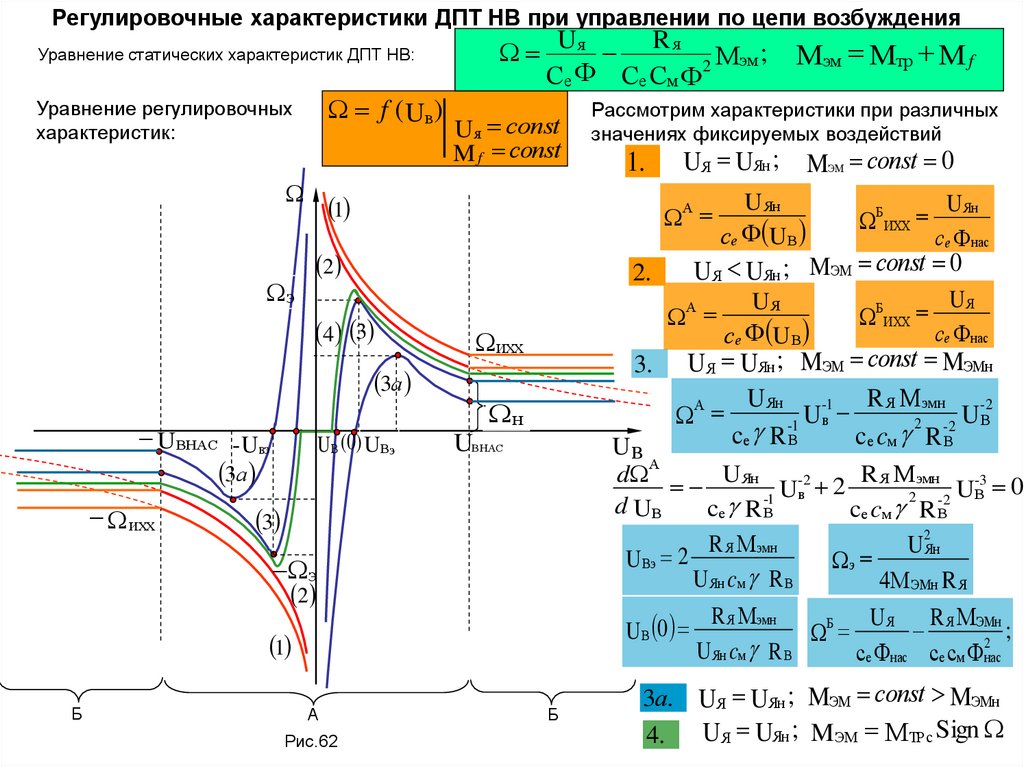
Регулировочные характеристики ДПТ НВ при управлении по цепи возбужденияУравнение статических характеристик ДПТ НВ:
f ( Uв )
Уравнение регулировочных
характеристик:
Uя соnst
M f соnst
3а
U В ( 0) U В э
3а
А
ихх
3.
н
UВНАС
3
2
1
А
Рис.62
U Ян
се Ф U В
UЯ
се Ф U В
Б
ИХХ
U Ян
се Фнас
Б
ИХХ
UЯ
се Фнас
UЯ UЯн ; MЭМ соnst MЭМн
U Ян -1 R Я М эмн -2
А
2 -2 U В
-1 U в
cе R В
cе c м R В
Uв
А
d
UЯн
R Я Мэмн -3
-2
2
0
U
в
2 - 2 UВ
-1
d UВ
cе R В
cе cм R В
2
R
U
Я М эмн
Ян
UВэ 2
э
U Ян cм R В
4МЭМн R Я
R Я Мэмн
U Я R Я МЭМн
Б
;
UВ 0
2
U Ян cм R В
се Фнас се см Фнас
э
Б
MЭМ соnst 0
UЯ UЯн ; MЭМ соnst 0
2.
4 3
UВНАС - Uвэ
UЯ UЯн ;
1.
А
2
Мэм Мтр М f
Рассмотрим характеристики при различных
значениях фиксируемых воздействий
1
э
ихх
Uя R я 2 Мэм ;
Се Ф Се См Ф
Б
3а.
4.
UЯ UЯн ; MЭМ соnst MЭМн
UЯ UЯн ; MЭМ МТРc Sign
52.
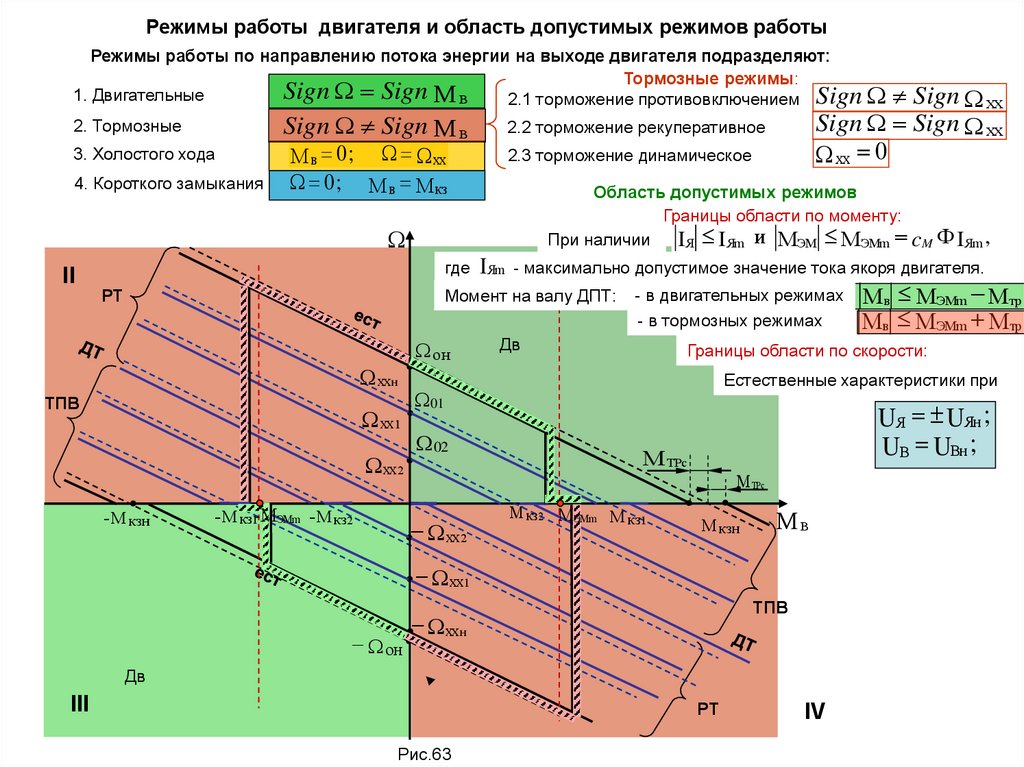
Режимы работы двигателя и область допустимых режимов работыРежимы работы по направлению потока энергии на выходе двигателя подразделяют:
Тормозные режимы:
Sign Sign M в
1. Двигательные
2.1 торможение противовключением Sign
Sign Sign M в
2. Тормозные
3. Холостого хода
4. Короткого замыкания
2.2 торможение рекуперативное
M в 0 ; хх
0 ; М в М кз
2.3 торможение динамическое
Область допустимых режимов
Границы области по моменту:
При наличии
IЯ IЯm и МЭМ МЭМm cM Ф IЯm ,
II
где
IЯm
- максимально допустимое значение тока якоря двигателя.
Момент на валу ДПТ:
РТ
ххн
ТПВ
хх1
хх2
- М кзн
- М кз1-МЭМm - М кз2
он
I
- в двигательных режимах
- в тормозных режимах
Дв
Естественные характеристики при
UЯ UЯн ;
UВ UВн ;
М ТРс
М ТРс
хх2
М кз2 МЭМm М кз1
М кзн
Мв
хх1
он
ТПВ
ххн
Дв
III
РТ
Рис.63
Мв МЭМm Мтр
Мв МЭМm Мтр
Границы области по скорости:
01
02
Sign хх
Sign Sign хх
хх 0
IV
53.
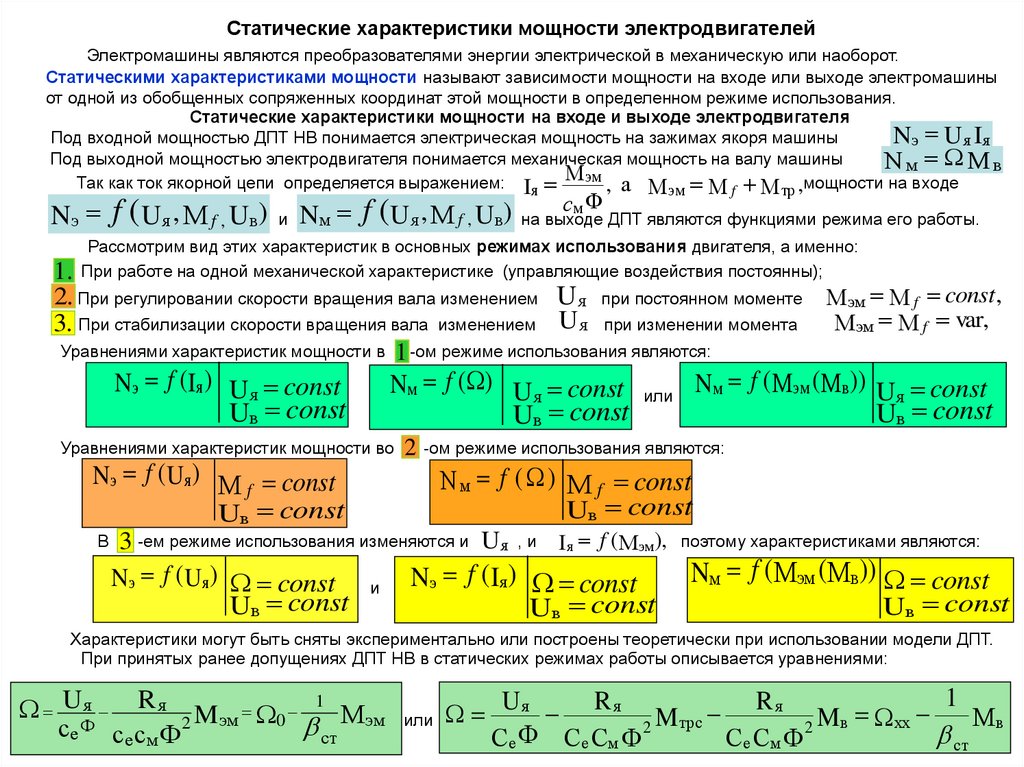
Статические характеристики мощности электродвигателейЭлектромашины являются преобразователями энергии электрической в механическую или наоборот.
Статическими характеристиками мощности называют зависимости мощности на входе или выходе электромашины
от одной из обобщенных сопряженных координат этой мощности в определенном режиме использования.
Статические характеристики мощности на входе и выходе электродвигателя
Nэ U я I я
Под входной мощностью ДПТ НВ понимается электрическая мощность на зажимах якоря машины
Под выходной мощностью электродвигателя понимается механическая мощность на валу машины
Nм Мв
М
эм
Так как ток якорной цепи определяется выражением: Iя
, а Мэм М f М тр ,мощности на входе
N э f ( U я , М f , Uв )
и
Nм f ( U я , М f , Uв )
см Ф
на выходе ДПТ являются функциями режима его работы.
Рассмотрим вид этих характеристик в основных режимах использования двигателя, а именно:
При работе на одной механической характеристике (управляющие воздействия постоянны);
1.
2. При регулировании скорости вращения вала изменением U я при постоянном моменте Мэм М f const ,
3. При стабилизации скорости вращения вала изменением U я при изменении момента Мэм М f var,
Уравнениями характеристик мощности в 1 -ом режиме использования являются:
Nэ f (Iя) Uя const
Uв const
Nм f ( ) Uя const
Uв const
Уравнениями характеристик мощности во
Nэ f ( Uя) M f const
Uв const
В
или
Nм f (Мэм (Мв)) Uя const
Uв const
2 -ом режиме использования являются:
N м f ( ) М f const
Uв const
3 -ем режиме использования изменяются и Uя , и Iя f (Мэм), поэтому характеристиками являются:
Nм f (Мэм (Мв)) const
Nэ f ( Uя) const и Nэ f (Iя ) const
Uв const
Uв const
Uв const
Характеристики могут быть сняты экспериментально или построены теоретически при использовании модели ДПТ.
При принятых ранее допущениях ДПТ НВ в статических режимах работы описывается уравнениями:
U я R я 2 Mэм 0 1 Мэм
ст
се Ф се см Ф
или
1
U я R я 2 M трс R я 2 Mв хх
Мв
Ф
Се
Се См Ф
Се См Ф
ст
54.
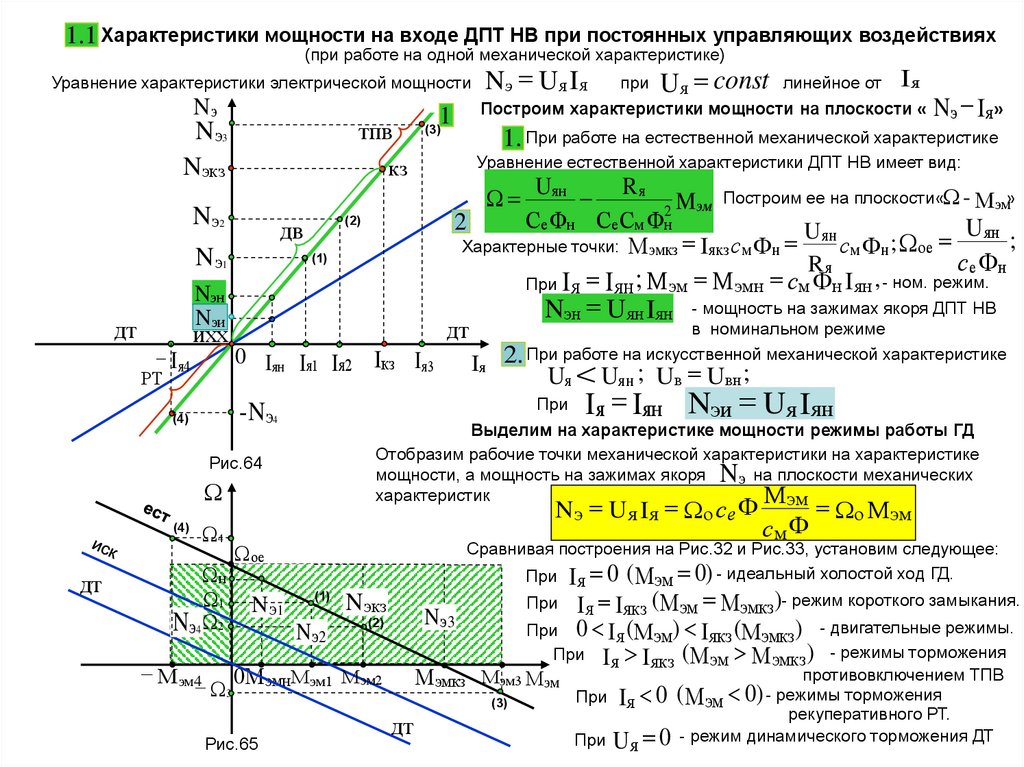
1.1 Характеристики мощности на входе ДПТ НВ при постоянных управляющих воздействиях(при работе на одной механической характеристике)
Уравнение характеристики электрической мощности
Nэ
тпв
Nэ3
Nэкз
Nэ1
дт
I я4
Nэн
Nэи
ихх
РТ
дт
4
н
1
Nэ4 2
Iкз I я3
Iя
- мощность на зажимах якоря ДПТ НВ
в номинальном режиме
2. При работе на искусственной механической характеристике
Uя
Uян ; Uв Uвн ;
Iя Iян Nэи Uя Iян
Выделим на характеристике мощности режимы работы ГД
Отобразим рабочие точки механической характеристики на характеристике
мощности, а мощность на зажимах якоря Nэ на плоскости механических
характеристик
Мэм
Рис.64
(4)
Nэ U я Iя о се Ф
ое
N э1
см Ф
о Мэм
Сравнивая построения на Рис.32 и Рис.33, установим следующее:
При Iя 0 (Мэм 0) - идеальный холостой ход ГД.
(1)
Nэ2
N экз
Nэ3
(2)
М эм4 0МэмнМэм1 М эм2
3
Рис.65
Nэ I я »
Nэн Uян Iян
При
4
Iя
1. При работе на естественной механической характеристике
дт
- Nэ
(4)
линейное от
Uян R я 2 Mэм Построим ее на плоскости« - Мэм»
Се Фн Се См Фн
2
U ян ;
Uян
Характерные точки: Мэмкз Iякз см Фн
см Фн ; ое
се Фн
Rя
,
;
ном.
режим.
При I я I ян М эм М эмн см Фн I ян
(1)
0 Iян Iя1 Iя2
Uя const
Уравнение естественной характеристики ДПТ НВ имеет вид:
(2)
дв
2
при
Построим характеристики мощности на плоскости «
1
(3)
кз
Nэ
N э U я Iя
Мэмкз
дт
Iя Iякз (Мэм Мэмкз)- режим короткого замыкания.
При 0 Iя (Мэм) Iякз (Мэмкз) - двигательные режимы.
При I я I якз (Мэм Мэмкз) - режимы торможения
противовключением ТПВ
М эм3 М эм
режимы
торможения
При Iя 0 (Мэм 0)
(3)
При
При
Uя 0
рекуперативного РТ.
- режим динамического торможения ДТ
55.
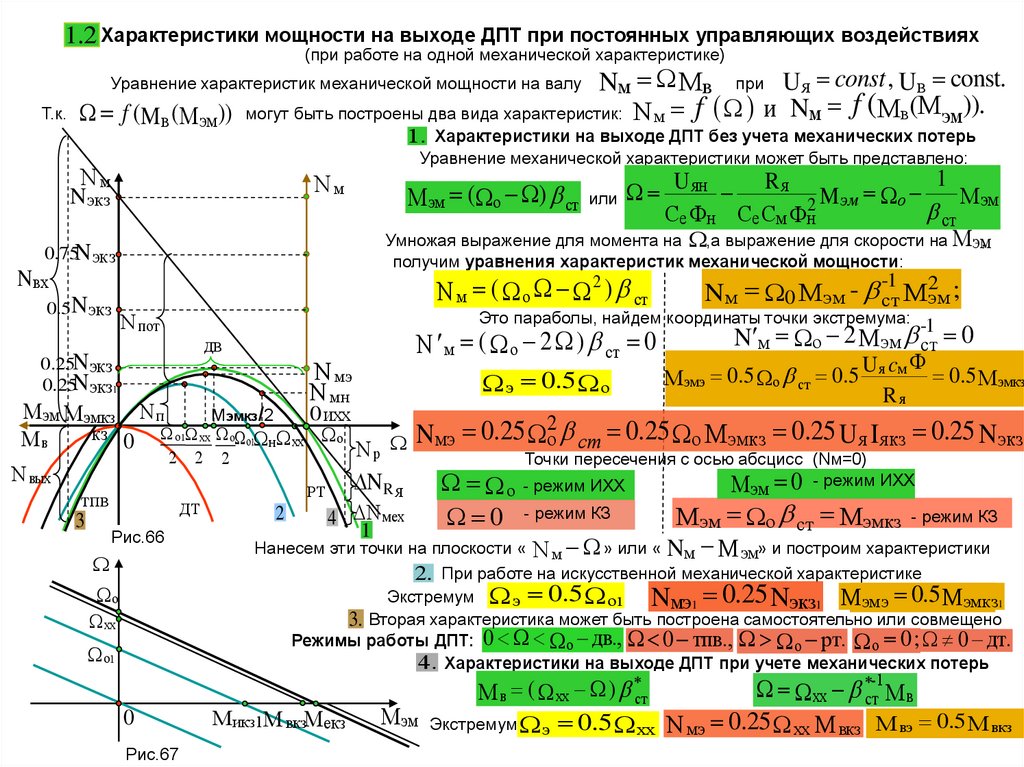
1.2 Характеристики мощности на выходе ДПТ при постоянных управляющих воздействиях(при работе на одной механической характеристике)
Уравнение характеристик механической мощности на валу
Т.к.
f (Mв (Мэм))
Nм
1
U ян R я
M
М эм
или
о
2 эм
Се Фн Се См Фн
ст
Умножая выражение для момента на ,а выражение для скорости на М эм
,
Nм
Мэм ( о ) ст
0.75N экз
получим уравнения характеристик механической мощности:
-1
N м ( о 2 ) ст
Nм 0 Мэм - ст М2эм ;
Это параболы, найдем координаты точки экстремума: -1
Nвх
N пот
дв
0.25N экз
0.25N экз1
N м ( о 2 ) ст 0
N мэ
N мн
э 0.5 о
М эм М эмкз N п
0 ихх
Мэмкз/2
кз 0 о1 хх о о1 н хх о
Мв
Nр
2 2 2
N вых
N
тпв
3
U я const , Uв const.
N м f и Nм f (Мв(Мэм)).
при
могут быть построены два вида характеристик:
1. Характеристики на выходе ДПТ без учета механических потерь
Уравнение механической характеристики может быть представлено:
N экз
0.5N экз
Nм Мв
ДТ
Рис.66
РТ
N м о 2 Мэм ст 0
М эмэ 0.5 о ст 0.5
U я c м Ф 0 .5
М эмкз
Rя
Nмэ 0.25 о2 ст 0.25 о Мэмкз 0.25 U я Iякз 0.25 Nэкз
Rя
о
0
Точки пересечения с осью абсцисс (Nм=0)
- режим ИХХ
М 0 - режим ИХХ
эм
Мэм о ст Мэмкз - режим КЗ
Нанесем эти точки на плоскости « N м » или « Nм М эм» и построим характеристики
2
4 N мех
1
- режим КЗ
2. При работе на искусственной механической характеристике
Экстремум э 0.5 о1
Nмэ1 0.25 Nэкз1 Мэмэ 0.5 Мэмкз1
о
хх
3. Вторая характеристика может быть построена самостоятельно или совмещено
Режимы работы ДПТ: 0 о дв., 0 тпв., о рт. о 0 ; 0 дт.
4. Характеристики на выходе ДПТ при учете механических потерь
хх ст-1 М в
М в ( хх ) ст
о1
0
Рис.67
Микз1М вкзМекз
М эм
Экстремум э
0.5 хх N мэ 0.25 хх М вкз М вэ 0.5 М вкз
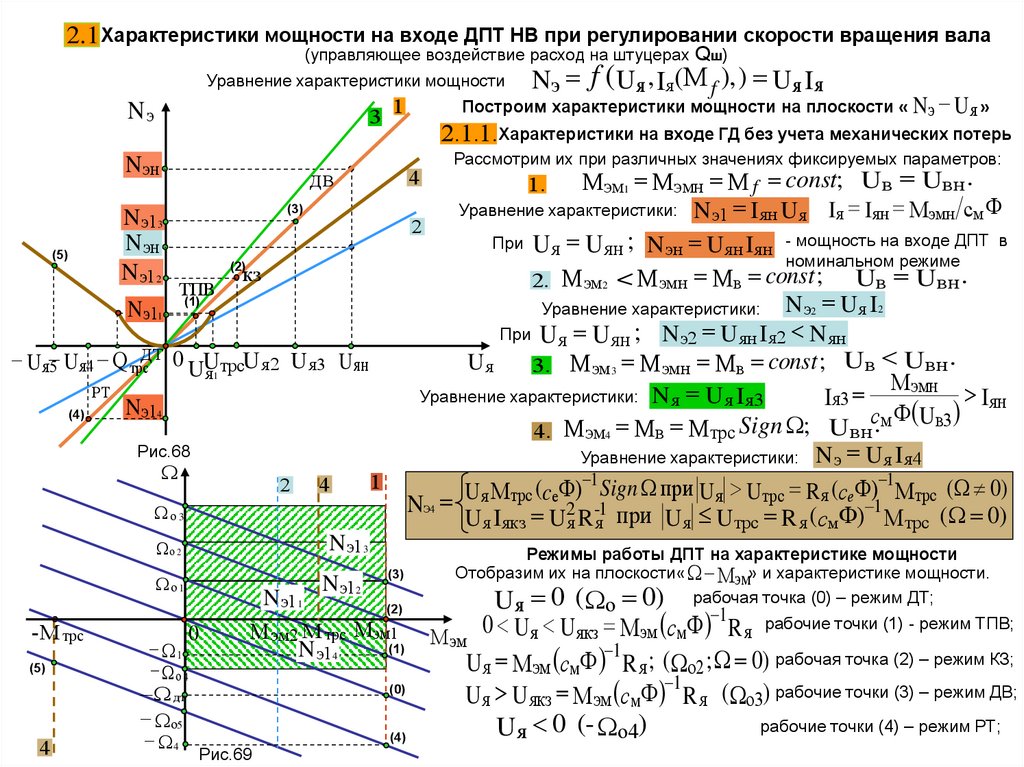
56.
2.1 Характеристики мощности на входе ДПТ НВ при регулировании скорости вращения вала(управляющее воздействие расход на штуцерах Qш)
Уравнение характеристики мощности
Nэ Uя , Iя(М f ), )
f(
Nэ
3
N эн
(5)
2.1.1.Характеристики на входе ГД без учета механических потерь
Nэ11
(2)
кз
U я5 U я4 Q трсДТ 0 UUтрсU я2 U я3 U ян
я1
РТ
(4)
Nэ14
Рис.68
2
4
1
о 3
Nэ13
о 2
(3)
о 1
-М трс
(5)
4
1
о 4
дт
о5
4
0
Nэ12
Nэ11
(2)
М эм2 М трс М эм1
(1)
Nэ14
(0)
(4)
Рис.69
Рассмотрим их при различных значениях фиксируемых параметров:
Мэм1 Мэмн М f const; Uв Uвн .
Уравнение характеристики: N э1 I ян U я I я I ян М эмн см Ф
2
При U я U ян ; N эн U ян I ян - мощность на входе ДПТ в
номинальном режиме
Uв Uвн .
2. М эм2 М эмн Мв const ;
Уравнение характеристики: N э2 U я I2
При U я U ян ; N э2 U ян I я2 N ян
Uя
3. М эм3 М эмн Мв const ; Uв Uвн .
Мэмн
Уравнение характеристики: N я U я I я3
Iя3
Iян
Ф
с
U
м
в3
4. Мэм4 Мв М трс Sign ; U вн .
Уравнение характеристики: N э U я I я4
(cеФ) 1 Sign при Uя Uтрс R я (сеФ) 1 Мтрс ( 0)
U
М
трс
я
1
NЭ4
Uя Iякз U2я R -я1 при Uя Uтрс R я (смФ) Мтрс ( 0)
4
(3)
тпв
(1)
Построим характеристики мощности на плоскости « N э U я »
1
ДВ
Nэ13
N эн
Nэ12
Uя Iя
1.
Режимы работы ДПТ на характеристике мощности
Отобразим их на плоскости« Мэм» и характеристике мощности.
Uя 0 ( о 0) рабочая точка (0) – режим ДТ;
1
0
Ф
U
U
М
R я рабочие точки (1) - режим ТПВ;
с
эм
я
якз
м
М эм
1
U я Мэм смФ R я ; ( о2 ; 0) рабочая точка (2) – режим КЗ;
1
U я U якз Мэм смФ R я ( о3) рабочие точки (3) – режим ДВ;
рабочие точки (4) – режим РТ;
U я 0 (- о4)
57.
2.2 Характеристики мощности на выходе двигателя при регулировании скорости вращения валаNэ
N эн
(управление по цепи якоря)
2.2.1.Характеристики на выходе ДПТ без учета механических потерь
1
Nм
1. Мэм1 Мэмн М f Мв const;
3
Nэ
N мн
ДВ
1 Уравнение характеристики: при
2
N мн
N экз
N м13
0 тпв U якз
4 дт 1 кз 0
РТ
ДТ
РТ
тпв N м11
U ян
U я3
ХХ
н
3
N мдт
N э14
N М4
2
4
1
о 3
ДВ
о 2
о 1
(5)
4
М трс Sign при ( 0)
0 при ( 0)
Рис.70
М трс
н ; Nмн М эмн н - мощность на валу ДПТ в
номинальном режиме
Uв Uвн .
2. М эм2 М эмн Мв const ;
Уравнение характеристики: Nм2 Мэм2
При н ; Nм2 М эм н Nмн
Uв Uвн .
3. Мэм3 Мэмн Мв const ;
Uя
Уравнение характеристики: Nм3 МэмН
4. Мэм4 Мв М трс Sign ; U 1.
При
4
ДВ
М эм М эмн
Uвн .
Nм1 Мэмн
(3)
N м13
(2)
Режимы работы ГД на характеристике мощности
0 рабочая точка (2) – режим КЗ;
рабочие точки (3) – режим ДВ;
0
0 дт
дт
дт
рабочие точки (1) - режим ТПВ;
рабочая точка (0) – режим ДТ;
рабочие точки (4) – режим РТ;
М эм2 М трс М эм1
0
М эм
1 N м11
Потери мощности (мощность потерь в якоре)
N мдт (1) тпв
о 4
Отобразим на плоскости « N м - » характеристики Nэ f ( U я)
(0)
дт
N м14
При Uя 0 Nэ 0 режим ДТ, – начало координат « Nэ U я »
4
Рис.71
(4)
РТ
Мощность потерь (в якоре)
Nэ Nэн Nмн Nэкз
58.
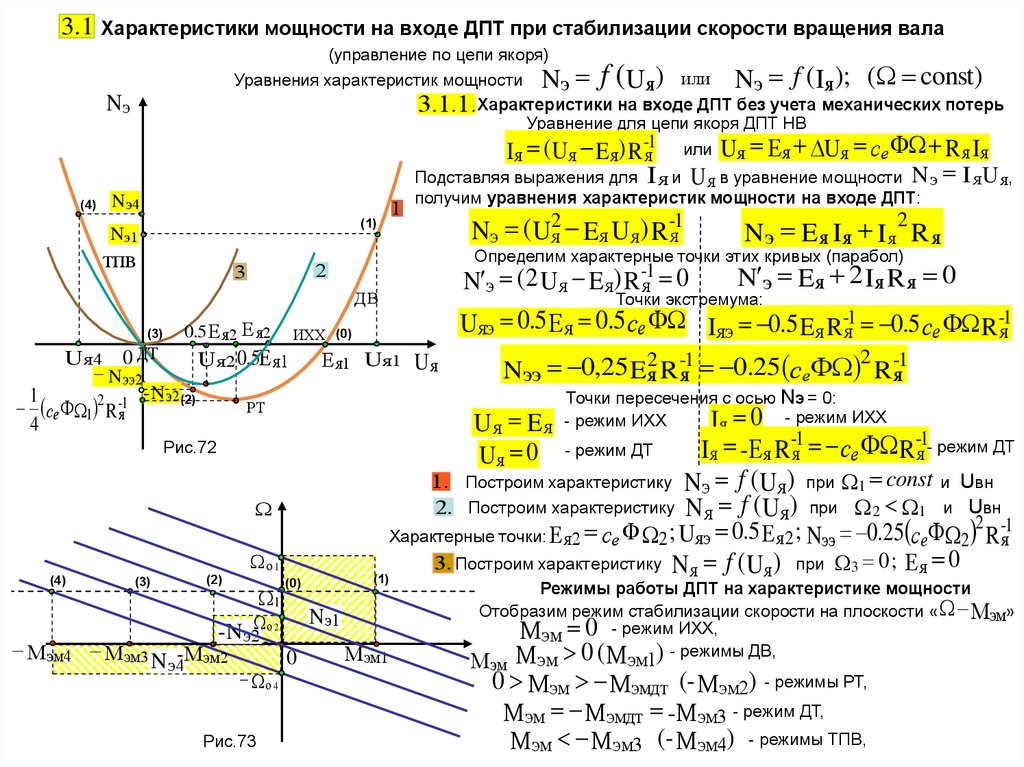
3.1 Характеристики мощности на входе ДПТ при стабилизации скорости вращения вала(управление по цепи якоря)
Уравнения характеристик мощности Nэ
Uя) или Nэ f (Iя); ( const)
3.1.1.Характеристики на входе ДПТ без учета механических потерь
Уравнение для цепи якоря ДПТ НВ
f(
Nэ
Iя (Uя Eя) R -я1 или Uя Ея Uя се Ф R я Iя
Подставляя выражения для I я и U я в уравнение мощности N э I я U я,
(4)
N э4
(1)
Nэ1
тпв
1
получим уравнения характеристик мощности на входе ДПТ:
ДВ
(3)
0.5 Е я2 Е я2
Uя4 0 ДТ
N ээ2
- Nэ2(2)
1
сеФ 1 2 R -я1
4
1. Построим характеристику
2. Построим характеристику
о 1
М эм4 М эм3
Е я1 Uя1 U я
Uяэ 0.5 Ея 0.5 се Ф Iяэ 0.5 Eя R -я1 0.5 се Ф R -я1
2
Nээ 0,25 E2я R -я1 0.25 сеФ R -я1
я
(3)
N э Eя 2 Iя R я 0
Точки пересечения с осью NЭ = 0:
Iя 0 - режим ИХХ
U я E я режим ИХХ
Iя -Ея R-я1 се Ф R-я1- режим ДТ
U 0 - режим ДТ
РТ
Рис.72
(4)
N э (2 Uя Eя) R -я1 0
(2)
1
(0)
- Nэ2 о 2
N э4-М эм2
о 4
Рис.73
2
Точки экстремума:
ИХХ (0)
Uя2 0.5Е я1
Nэ E я Iя Iя R я
Определим характерные точки этих кривых (парабол)
2
3
Nэ (U2я Eя Uя) R -я1
0
Nэ f ( U я )
Nя f ( Uя)
при 1 const и Uвн
при 2 1 и Uвн
2
Характерные точки: Ея2 се Ф 2 ; Uяэ 0.5 Ея 2 ; Nээ 0.25 сеФ 2 R я
3. Построим характеристику Nя f ( Uя) при 3 0 ; Ея 0
(1)
Режимы работы ДПТ на характеристике мощности
Отобразим режим стабилизации скорости на плоскости « Мэм»
Nэ1
Мэм 0 - режим ИХХ,
М эм1
М эм Мэм 0 (Мэм1) - режимы ДВ,
0 Мэм Мэмдт (- Мэм2) - режимы РТ,
Мэм Мэмдт -Мэм3 - режим ДТ,
Мэм Мэм3 (- Мэм4) - режимы ТПВ,
-1
59.
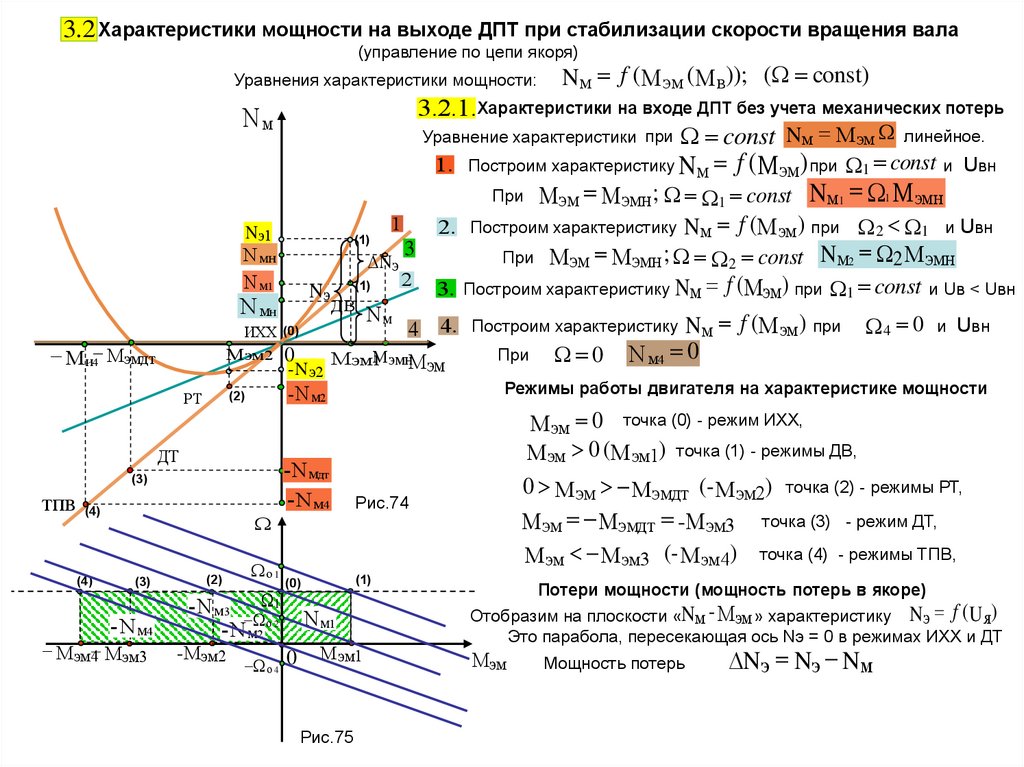
3.2 Характеристики мощности на выходе ДПТ при стабилизации скорости вращения вала(управление по цепи якоря)
Уравнения характеристики мощности:
Nм f (М эм (Мв)); ( const)
3.2.1.Характеристики на входе ДПТ без учета механических потерь
Уравнение характеристики при const N м М эм линейное.
1. Построим характеристику Nм f (Мэм) при 1 const и Uвн
При Мэм Мэмн ; 1 const Nм1 1 М эмн
1
2. Построим характеристику Nм f (М эм) при 2 1 и Uвн
N э1
(1)
3
N мн
При Мэм Мэмн ; 2 const Nм2 2 Мэмн
Nэ
2 3. Построим характеристику N f (М ) при
N м1
1 const и Uв < Uвн
Nэ (1)
эм
м
ДВ
N мн
Nм
4 4. Построим характеристику Nм f (М эм) при 4 0 и Uвн
ИХХ (0)
М эм2 0
При 0 N м4 0
МэмнМ
Мэм1
эм
Nм
М и4 Мэмдт
- N э2
РТ
ДТ
(3)
тпв
(4)
(4)
(3)
- N м4
Мэм4 Мэм3
(2)
о 1
- N м3 1
- N м 2 о 2
-Мэм2
Режимы работы двигателя на характеристике мощности
- N м2
(2)
- N мдт
- N м4
Рис.74
(0)
(1)
о 4 0
N м1
М эм1
Рис.75
М эм 0 точка (0) - режим ИХХ,
М эм 0 (М эм1) точка (1) - режимы ДВ,
0 Мэм Мэмдт (- Мэм2) точка (2) - режимы РТ,
Мэм Мэмдт -Мэм3 точка (3) - режим ДТ,
М эм М эм3 (- М эм4) точка (4) - режимы ТПВ,
Потери мощности (мощность потерь в якоре)
Отобразим на плоскости «Nм - Мэм » характеристику N э f ( U я)
Это парабола, пересекающая ось Nэ = 0 в режимах ИХХ и ДТ
Мэм
Мощность потерь
Nэ Nэ Nм
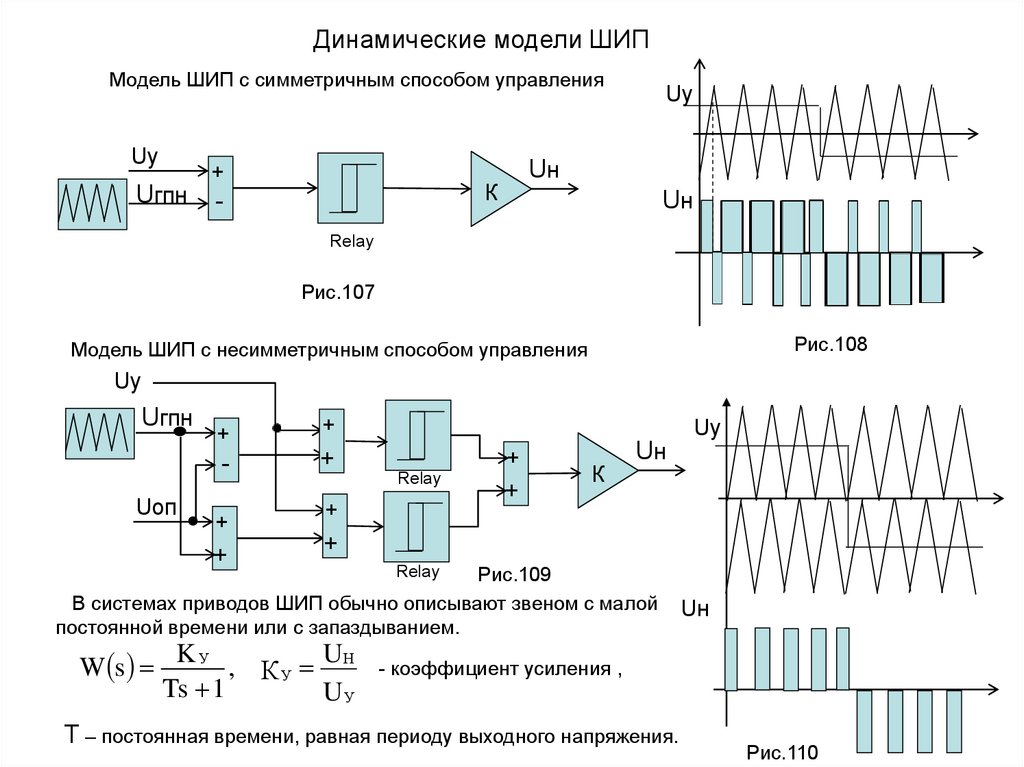
60. Нелинейная математическая модель ДПТ (при принятых ранее допущениях):
ДИНАМИЧЕСКИЕ МОДЕЛИ И ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ДПТ НВНелинейная математическая модель ДПТ (при принятых ранее допущениях):
d
U я Е я U R U L с е Ф R я I я L я I я
dt
d
Uв U Rв U Lв R в Iв Lв Iв
Уравнение цепи возбуждения:
dt
Iв при Iв Iвнас
Уравнение магнитной цепи :
Фв
Фнас Sign Iв при Iв Iвнас
d
М эм М f М трс М дин ; см Ф I я М f М трс Sign J д
Уравнение моментов:
dt
Уравнение цепи якоря:
М эм см Ф I я
М трс
- электромагнитный момент ДПТ;
Мтрс Sign
при 0
d
М дин J д J д - динамический момент ДПТ;
dt
(Мэм - М f ) при 0 и Мэм М f М трс
- момент сухих трений на валу ДПТ;
М трс Sign (Мэм - М f ) при 0 и Мэм М f М трс
Нелинейная структурная схема ДПТ НВ
UL
Uя
Lя D
UR
МТРс
Iя
1
см
Rя
Ея
URв
Uв
1
Rв
ULв
Iв
М эм
Фнас
Iвнас
Ф
Lя D
Мf
се
Рис.76
М дин
1
JД D
61.
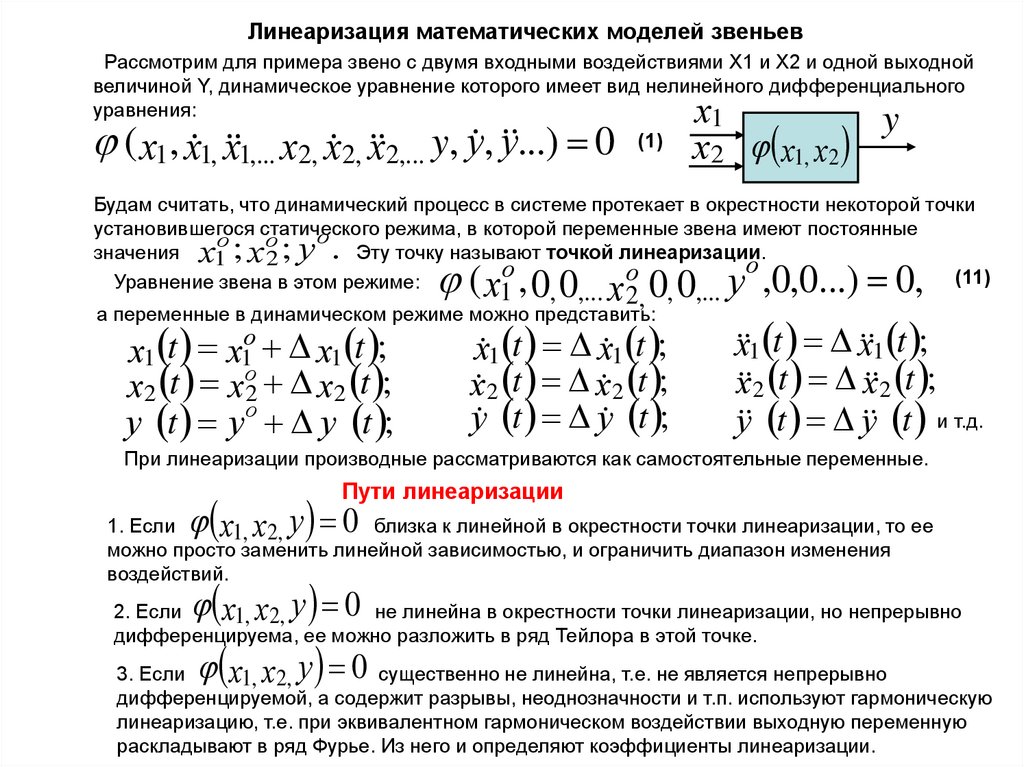
Линеаризация математических моделей звеньевРассмотрим для примера звено с двумя входными воздействиями Х1 и Х2 и одной выходной
величиной Y, динамическое уравнение которого имеет вид нелинейного дифференциального
уравнения:
1
( х1, х 1, х 1,... х2, х 2, х 2,... y, у , у ...) 0
(1)
х
y
х2 х1, х2
Будам считать, что динамический процесс в системе протекает в окрестности некоторой точки
установившегося статического
режима, в которой переменные звена имеют постоянные
о
о
о
значения
Эту точку называют точкой линеаризации.
1
2
о
о
о
(11)
Уравнение звена в этом режиме:
х ;х ; у .
( х1 , 0, 0,... х2, 0, 0,... у ,0,0...) 0,
а переменные в динамическом режиме можно представить:
о
х1 t х1 х1 t ;
о
t
х2
х2 х2 t ;
о
у t у у t ;
х 1 t х 1 t ;
х 2 t х 2 t ;
у t у t ;
х 1 t х 1 t ;
х 2 t х 2 t ;
у t у t и т.д.
При линеаризации производные рассматриваются как самостоятельные переменные.
Пути линеаризации
х х у 0
1. Если
близка к линейной в окрестности точки линеаризации, то ее
1, 2,
можно просто заменить линейной зависимостью, и ограничить диапазон изменения
воздействий.
х х у 0
2. Если
не линейна в окрестности точки линеаризации, но непрерывно
1, 2,
дифференцируема, ее можно разложить в ряд Тейлора в этой точке.
х х у 0
3. Если
существенно не линейна, т.е. не является непрерывно
1, 2,
дифференцируемой, а содержит разрывы, неоднозначности и т.п. используют гармоническую
линеаризацию, т.е. при эквивалентном гармоническом воздействии выходную переменную
раскладывают в ряд Фурье. Из него и определяют коэффициенты линеаризации.
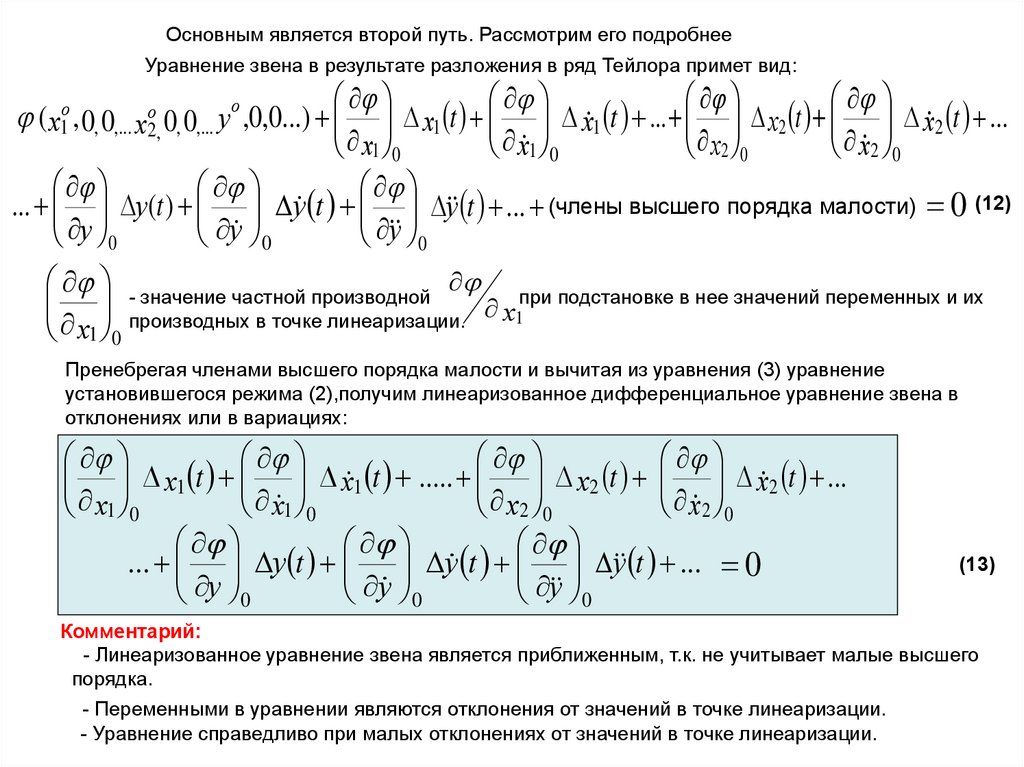
62.
Основным является второй путь. Рассмотрим его подробнееУравнение звена в результате разложения в ряд Тейлора примет вид:
( х1о , 0, 0,... хо2, 0, 0,... уо ,0,0...) х1 t х 1 t ... х2 t х 2 t ...
х1 0
х 1 0
х2 0
х 2 0
... у (t ) у t у t ... (члены высшего порядка малости) 0 (12)
у 0
у 0
у 0
- значение частной производной при подстановке в нее значений переменных и их
производных в точке линеаризации. х1
х1 0
Пренебрегая членами высшего порядка малости и вычитая из уравнения (3) уравнение
установившегося режима (2),получим линеаризованное дифференциальное уравнение звена в
отклонениях или в вариациях:
х1 t х 1 t ..... х2 t х 2 t ...
х1 0
х 1 0
х2 0
х 2 0
... у t у t у t ... 0
у 0
у 0
у 0
(13)
Комментарий:
- Линеаризованное уравнение звена является приближенным, т.к. не учитывает малые высшего
порядка.
- Переменными в уравнении являются отклонения от значений в точке линеаризации.
- Уравнение справедливо при малых отклонениях от значений в точке линеаризации.
63.
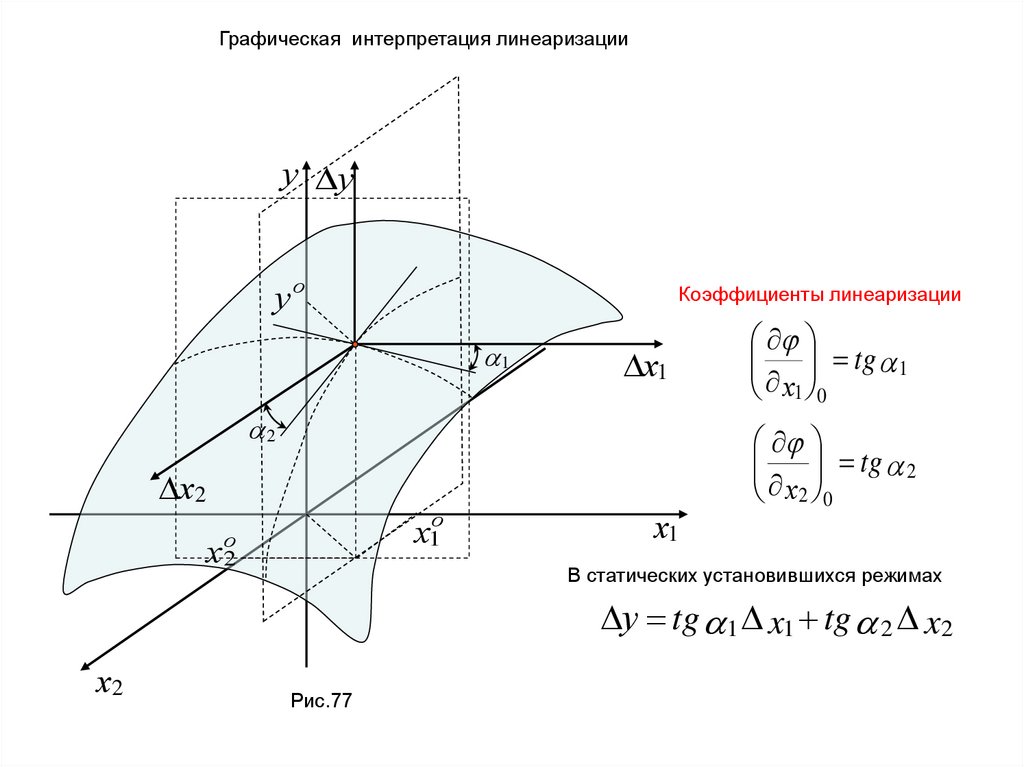
Графическая интерпретация линеаризацииу у
у
о
Коэффициенты линеаризации
1
х1
2
х2
о
х1
о
х2
х1
tg 1
х1 0
tg 2
х 2 0
В статических установившихся режимах
у tg 1 x1 tg 2 x2
х2
Рис.77
64. Линейная математическая модель двигателя
Допущения при линеаризации:- точка линеаризации {U яо ; М fо ; Uво ; о} выбрана в рабочем диапазоне изменения воздействий;
- переменные имеют малые отклонения от значений в точке линеаризации;
- характеристика сухих трений линеаризована М трc f трл одним из известных методов
(например, гармонической линеаризации);
Разложим уравнения напряжений и моментов в выбранной рабочей точке линеаризации в ряд Тейлора и
ограничимся рассмотрением лишь линейных членов разложения, отбрасывая члены высшего порядка малости.
Переходя от абсолютных значений переменных к их отклонениям от значений в точке линеаризации, получим
линеаризованные уравнения в отклонениях:
Линеаризованное уравнение цепи якоря в отклонениях
d
U я t E я t URя t ULя t се Фo t се o Ф t R я Iя t Lя Iя t (14)
dt
E я t се Фo t се o Ф t U я t U я t U яo
t t o
- отклонения переменных от их
UR t R я Iя t
Uв t Uв t Uвo
значений в точке линеаризации.
d
ULя t Lя Iя t
Iя t Iя t - Iяо
dt
Линеаризованные уравнения цепи возбуждения и магнитной цепи в отклонениях
Uв t URв t ULв t R в Iв t Lв
d
Iв t
dt
Ф t Iв t
(15)
Линеаризованное уравнение моментов в отклонениях
Мэм t М f t Мтрс t Мдин t ,
или
d
Мэм t см Фo Iя t см Iяо Ф t M f t f трл t J д t
М эм t см Фo Iя t см Iяо Ф t
М трс t f трл t
d
Мдин t J д t J д t
М f t М f t М fо dt
(16)
dt
- отклонение моментов от их значений в точке линеаризации.
65. ЛИНЕАРИЗОВАННАЯ ДИНАМИЧЕСКАЯ МОДЕЛЬ ДПТ НВ в изображениях
Перейдем в уравнениях (14) – (16) от переменных во времени к их изображениям по Лапласу:U я t U я s ; Uв t Uв s ;
Iя t Iя s ; E я t E я s ;
М f t М f s ; t s ;
Ф t Ф s ; М эм t M эм s
Получим линеаризованные уравнения для цепей двигателя в изображениях:
U я s се Фo s се o Ф s R я Iя s Lя s Iя s
(17)
Uв s R в Iв s Lв s Iв s (R в Lв s) Iв s
(18)
Ф s Iв s
(19)
Мэм s см Фo Iя s см Iяо Ф s M f s f трл s J д s s
(20)
ЛИНЕАРИЗОВАННАЯ СТРУКТУРНАЯ СХЕМА ДПТ НВ
Uв(s)
Iв(s)
1
R в L вS
Фв(s)
о
U я(s)
1
Iя(s)
R я L яS
М тр ( s )
I яо
Фо
См
М эм ( s )
J рs
Мf (s)
Ея(s)
Фо
Се
Рис.78
1
(s)
(s )
66. Передаточная функция ДПТ НВ при управлении по цепи якоря
Uв(s)1
Iв(s)
R в L вS
Фв(s)
М тр ( s )
о
U я(s)
1
R я L яS
Iя(s)
f трл
I яо
См
Фо
М эм ( s )
(s )
1
J р sJ р sf тр
Мf (s)
Ея(s)
Фо
Се
1 Jp s
Рис.79 Преобразованная структурная схема
1 f тр1 J p s
1
J p s f тр
Cм Фо /( R я L я s)(J p s f тр )
Cм Фо
1 се см Фо2 R я Lя s J p s f тр J p L я S2 (J p R я L я f тр )S Cм Се Фо2 R я f тр
2
*
/(
С
С
С
Ф
Ф
R я f тр )
о
о
м
м
е
К
(s)
WUя
(
)
Jp Lя
2 J p R я L я f тр S 1
Т 22 s2 T1s 1
S
См Се Фо2 R я f тр
См Се Фо2 R я f тр
1 / Се Фо
К
;
При Мтр=0 W U (s)
2
я
Jp Lя 2
Jp R я
s
1
S 1 Т я Тм s Tм
2S
2
См Се Фо
См Се Фо
J R
W
U я (s)
где:
Т я Lя
Rя
;
Тм
р
я
се см Фо2
(21)
(22)
(23)
(24)
67. Передаточная функция ДПТ НВ по возмущающему воздействию
ФоСе
М тр ( s )
Ея(s)
1
R я L яS
См
Фо
Рис.80 Преобразованная структурная схема
W
М f (s)
1 /( J p s f тр )
1
Се См Фо2
(L я s R я)(J p s f тр )
М эм ( s )
1
J р Js р sf тр
Mf (s)
R я Lя s
;
2
J p L я S ( J p R я L я f тр ) S Cм Се Фо
R я f тр
2
* 1
-R я (1 Т я s ) /( См Се Фо2 R я f тр )
К
Tя s
f
2 2
(
)
Jp Lя
2 J p R я L я f тр S 1
Т 2 s T1s 1
S
См Се Фо2 R я f тр
См Се Фо2 R я f тр
2
-К f 1 T я s ;
(s) -R я (1 Т я s ) / См Се Фо
При Мтр=0
W Мf
2
Jp Lя 2
Jp R я
s
Т
Т
Tм s 1
я
м
S
1
S
Rя
См Се Фо2
См Се Фо2
Kf
се см Фо2
W
М f (s)
(s )
(25)
(26)
68. Передаточная функция ДПТ НВ при управлении по цепи возбуждения
Uв(s)1
Iв(s)
R в L вS
Фв(s)
Се
о
М тр ( s )
I яо
(R я Lяs)
Фо
1
R я L яS
Ея(s)
Се
Iя(s)
Фо
См
М эм ( s )
1
(s )
J рs
Фо
Рис. 81 Преобразованная структурная схема
2
/(
С
С
С
Ф
Ф
R я f тр )
о
о
м
м
е
I
яо (
s
s)
R я L я се о
W Uв
(
)
J p Lя
s
2 J p R я L я f тр S 1
Ф
R в Lв о
S
См Се Фо2 R я f тр
См Се Фо2 R я f тр
*
Кв (1 Т я s)
s
W Uв
(1 Тв s)[ T22 s2 T1s 1]
Тя
о Iяо R я
Lв ; Т*
;
(
1
);
я
Тв
где: К в
1 сеФо о I яо R я
Rв
R в Ф о се Ф о о
(27)
(28)
69. Динамические характеристики ДПТ НВ как пропорционального звена второго порядка
Такие звенья, описываются уравнениями вида:d 2 y(t) d y(t) y(t) ( 2 2 p 1)y(t) kx(t)
b2 2
b1
T 2p T 1
dt
dt
K
Передаточная функция таких звеньев имеет вид: W(s)
T 22s 2 T 1s 1
(29)
В зависимости от сочетания параметров передаточной функции звена их подразделяют на 2-а типа:
- апериодические звенья второго порядка;
- колебательные звенья второго порядка.
Апериодические звенья второго порядка
К звеньям этого типа относят позиционные звенья второго порядка, параметры передаточной функции
которых соотносятся: Т 1 2T 2 . Это условие, при котором корни характеристического уравнения звена
T 22s 2 T 1s 1 0
S1,2
будут действительными.
4T 22
4T 22
,при Т 1 2T 2 подкоренное выражение 1
T1
0
( 1 1
)
2
2
T1
2T 2
T1
В этом случае характеристическое уравнение звена может быть представлено в виде:( T 3s 1 )( T 4 s 1 ) 0 ,
где:
T 3
1
S1
,
T 4
1
S2
, а передаточная функция звена в виде:
W(s)
K
( T 3s 1 )( T 4s 1)
Такая передаточная функция соответствует последовательному соединению двух апериодических
звеньев первого порядка с передаточными функциями
1
K
и W (s)
2
W 1(s)
( T 4 s 1 )
( T 3s 1 )
поэтому эти звенья и называют апериодическими 2-го порядка или двойными апериодическими.
(30)
70.
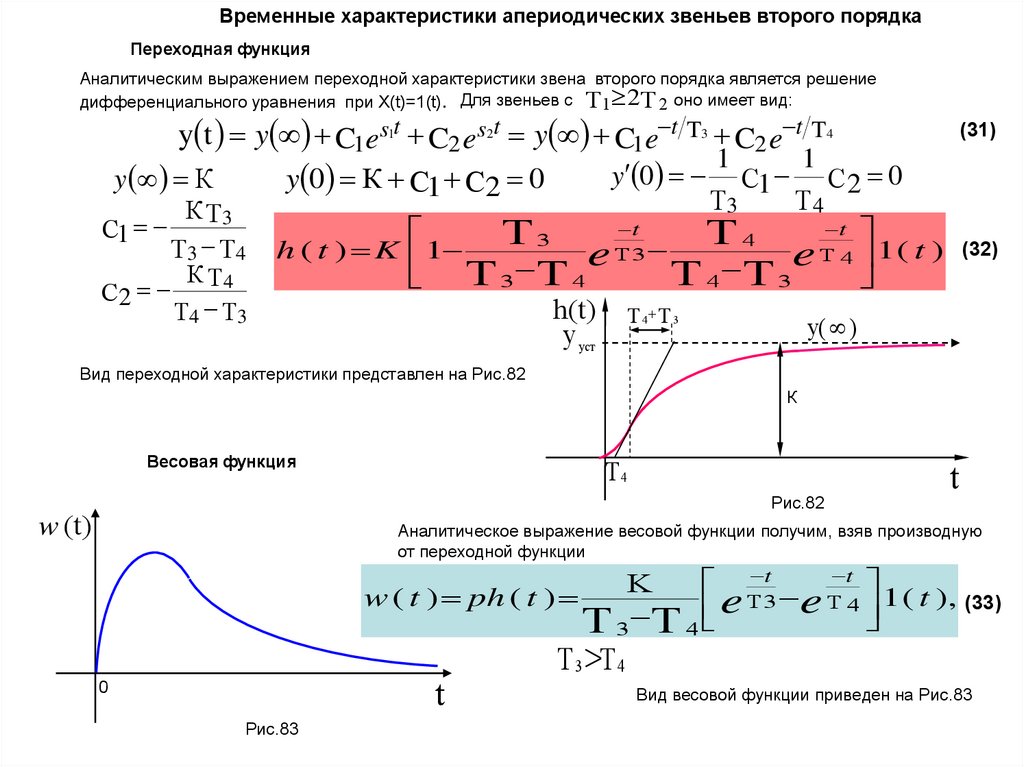
Временные характеристики апериодических звеньев второго порядкаПереходная функция
Аналитическим выражением переходной характеристики звена второго порядка является решение
дифференциального уравнения при Х(t)=1(t). Для звеньев с Т 1 2T 2 оно имеет вид:
y t y C1es1t C2 es2t y C1e t T3 C2 e t T4
1
1
y
0
y 0 К С1 С2 0
y К
С1
С2 0
К Т3
С1
Т3 Т 4
К Т4
С2
Т 4 Т3
Т3
(31)
Т4
t
t
T
T
3
4
h ( t ) K 1
e T3 e T 4 1 ( t )
T3 T4
T4 T3
h(t)
y уст
Т 4 T 3
(32)
y( )
Вид переходной характеристики представлен на Рис.82
К
Весовая функция
Т4
Рис.82
w (t)
t
Аналитическое выражение весовой функции получим, взяв производную
от переходной функции
t
t
K
w ( t ) ph ( t )
T3 e T 4 1 ( t ),
e
T3 T4
t
0
Рис.83
(33)
T3 T4
Вид весовой функции приведен на Рис.83
71. Частотные характеристики звеньев второго порядка
Частотная передаточная функция звеньев этого типа имеет видK
K
M( )e j ( ),
(34)
2
2
1-T 2 j T 1 1 j T 3 1 j T 4
K
K
M ( )
- модуль частотной передаточной функции
2 2
2 2
2 2 1
2
2
2
1
Т
Т
3
( 1 T 2) T 1
4
W(j )
( ) arctg
T 1
arctg T 3 arctg T 4
1-T 22 2
Аналитическое выражение ЛАХ: L( ) 20lgM(
L2( )
1
T3
40дб
- аргумент частотной передаточной функции
) 20lgK-20lg(1 T 32 2)1/2 20lg( 1 T 24 2)1/2
Асимптотами ЛАХ являются:
L1( ) 20lg K при T 3 0 1
1
L 2( ) 20lg K 20lgT 3 при T 4
1
T4
1
T3
L 1 ( ) 20 lg K
(35)
L 3( ) 20lg K 20lgT 3 20lgT 4
0дб/дек
T4
при
20дб
1
Аналитическое выражение ЛФХ:
180
0.01
( ) arctg T3 arctg T4
0
1350
0.1
1
сопр
10
сопр
100
1000
L2( )
90 0
45 0
L 3( )
0.01
( )
0.1
1
10
Рис.84
100
1000
1/с
(36)
ЛФХ при
0 асимптотически
стремится к 0, а при
к значению
0 .
180
Она может быть построена как сумма ЛФХ
двух апериодических звеньев 1-го
порядка.
1/с
72.
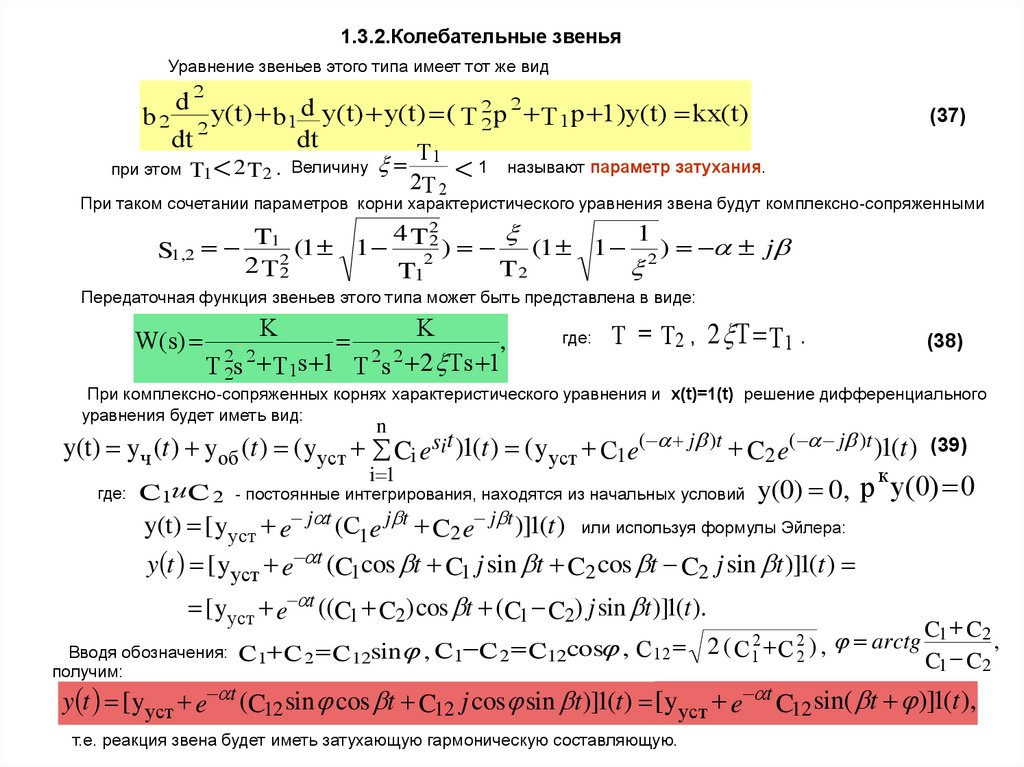
1.3.2.Колебательные звеньяУравнение звеньев этого типа имеет тот же вид
d 2 y(t) d y(t) y(t) ( 2 2 p 1)y(t) kx(t)
b2 2
b1
T 2p T 1
dt
dt
T1
1 называют параметр затухания.
при этом Т1 2 T 2 . Величину
(37)
2T 2
При таком сочетании параметров корни характеристического уравнения звена будут комплексно-сопряженными
4 T 22
1
T
1
(
1
1
)
(
1
1
) j
S1,2
2
2
2
2 Т2
T2
T1
Передаточная функция звеньев этого типа может быть представлена в виде:
W(s)
K
K
,
2 2 s 1
2 2 2 Ts 1
T 2s T 1
T s
где:
Т Т2 , 2 Т Т 1 .
(38)
При комплексно-сопряженных корнях характеристического уравнения и х(t)=1(t) решение дифференциального
уравнения будет иметь вид:
n
y(t) yч (t ) yоб (t ) ( y уст Ci esit )1(t ) ( y уст С1e( j )t C2 e( j )t )1(t )
где:
C1иC 2
i 1
- постоянные интегрирования, находятся из начальных условий
y(t) [ y уст e j t (С1e j t C2 e j t )]1(t )
(39)
к
y(0) 0, р y(0) 0
или используя формулы Эйлера:
y t [ yуст e t (C1cos t C1 j sin t C2 cos t C2 j sin t )]1(t )
[ yуст e t ((C1 C2) cos t (C1 C2) j sin t )]1(t ).
Вводя обозначения:
получим:
C1 C2
2
2
arctg
,
C1 C 2 C12sin , C1 C 2 C12cos , C12 2 ( C1 C 2 ) ,
C1 C2
y t [ yуст e t (C12 sin cos t C12 j cos sin t )]1(t ) [ yуст e t C12 sin( t )]1(t ),
т.е. реакция звена будет иметь затухающую гармоническую составляющую.
73.
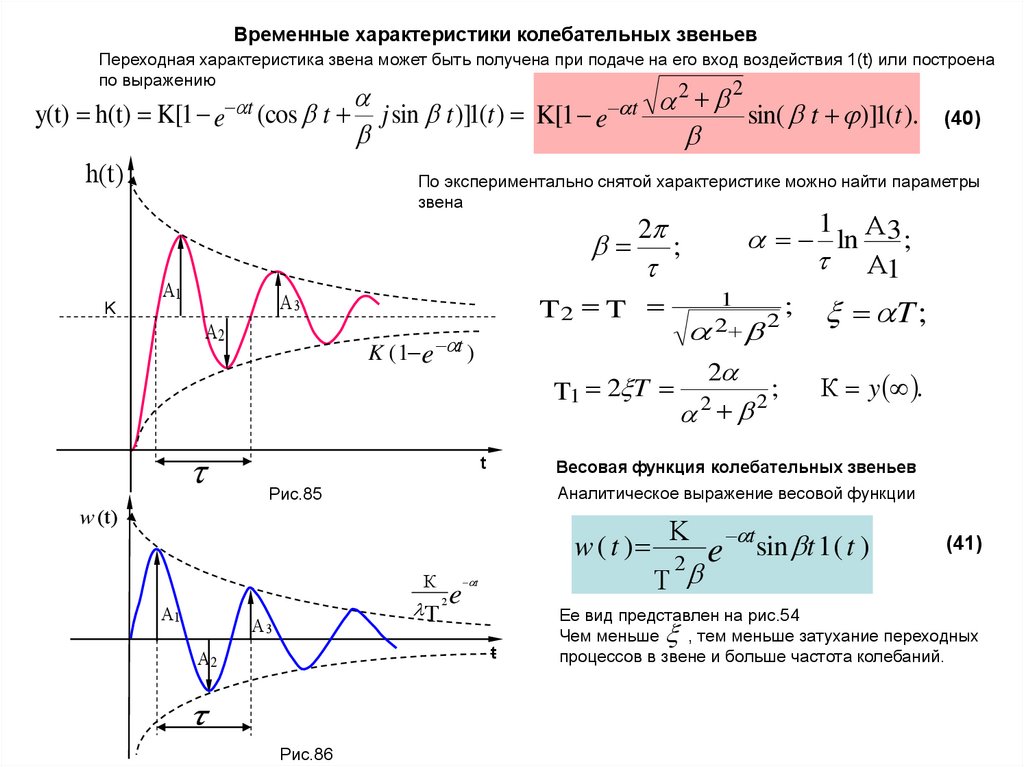
Временные характеристики колебательных звеньевПереходная характеристика звена может быть получена при подаче на его вход воздействия 1(t) или построена
по выражению
2 2
y(t) h(t) K[1 e t (cos t j sin t )]1(t ) K[1 e t
sin( t )]1(t ). (40)
h(t)
По экспериментально снятой характеристике можно найти параметры
звена
K
А1
K ( 1 e t )
t
w ( t )
К
Т
2
e
t
t
А2
Рис.86
2 2
;
К y .
Аналитическое выражение весовой функции
Рис.85
А3
2
T ;
Весовая функция колебательных звеньев
w (t)
А1
1
1
;
2
2
T1 2 T
ln А3 ;
А1
;
T2 T
А3
А2
2
K
2
T
t
e sin t 1 ( t )
(41)
Ее вид представлен на рис.54
Чем меньше
, тем меньше затухание переходных
процессов в звене и больше частота колебаний.
74.
Частотные характеристики колебательных звеньевЧастотная передаточная функция звена имеет вид:
W(j )
M ( )
K
K
M( )e j ( ),
(1-T 22 2 ) j T 1 1 T 2 2 j 2 T
K
2
( 1 2T 22) 2 T 12
( ) arctg
T 1
1-T 22 2
K
T
( 1 T )
2
arctg
2 2 4 2
2 T
2
1-T
2
2
- модуль частотной передаточной функции
2
- аргумент частотной передаточной функции
Аналитическое выражение ЛАХ: L( ) 20lgM( ) 20lgK - 20lg[(1 T 2 2 )
1
T
L2( )
L 1 ( ) 20 lg K
0 .2
0дб/дек
20дб
0 .4
0 .8
180 0
0.01
1350
90
0.1
1
( )
100
0 .8
0 .4
0 .2
0
45 0
0.01
сопр10
0.1
1
сопр 10
2
4 2T 2]1 /2
(44)
Асимптотами ЛАХ являются:
1
L1( ) 20lg K при Т
1
L 2( ) 20lg K 40lgT при Т
Вид реальной ЛАХ в значительной степени
зависит от значения особенно в области
1
частот близких к и может существенно
Т
отличаться от асимптотической ЛАХ. Поэтому
использование последних для колебательных
звеньев не всегда возможно.
1000
L2( )
100
Рис.87
2
(43)
0
0.1
40дб
(42)
1/с
При 0.4 0.7 отличие не превышает 3дб
и асимптотическими ЛАХ пользоваться
можно. В остальных случаях нужно вводить
поправки.
1/с
1000
ЛФХ также зависит от
и изменяется от
0 до
при изменении частоты от 0 до
75.
ПРИНЦИПИАЛЬНАЯ СХЕМА ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИИГ
ИD
ОЯг
Mf Г Г
E ЯГ
M ТР Г M Г
ОЯд
IЯ
E ЯД
UЯ
Ф BД
Ф BГ
U BГI BГ
MТР Д Mfд
КОд
КОг
д
MД
U BД
ОВг
I BД
ОВд
Рис.88
Условные обозначения на схеме:
Элементов:
Г – генератор;
ИД – исполнительный двигатель;
ОЯг – обмотка якоря генератора;
ОЯд – обмотка якоря двигателя;
ОВг – обмотка возбуждения генератора;
ОВд – обмотка возбуждения ДПТ;
КОг – компенсационная обмотка генератора;
КОд – компенсационная обмотка двигателя;
i = г,д (генератор или двигатель)
Переменных
U я i t , Uв i t - напряжения на зажимах цепи якоря и цепи
возбуждения i - ой машины ;
t
,
t
Iя i
Iв i - токи в цепи якоря и цепи возбуждения i-ой машины;
Фвi t - поток цепи возбуждения i- ой электромашины;
E яi t - ЭДС якоря i - ой машины ;
М эмi t - электромагнитный момент на валу i - ой машины;
М fi t - внешний возмущающий момент на валу i - ой машины;
М трi t - момент трения на валу i - ой машины;
i t - скорость вращения вала i - ой машины.
76.
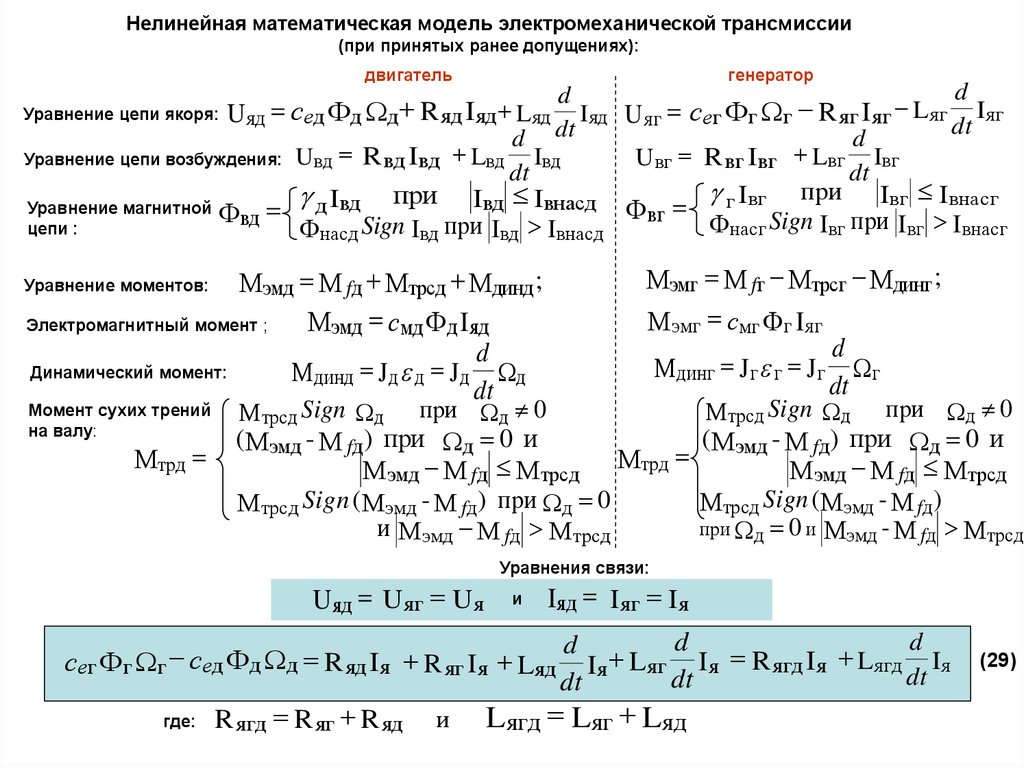
Нелинейная математическая модель электромеханической трансмиссии(при принятых ранее допущениях):
двигатель
генератор
d
d
Iяд U яг сег Фг г R яг I яг Lяг Iяг
dt
dt
d
d
Uвд R вд Iвд Lвд Iвд
Uвг R вг Iвг Lвг Iвг
dt
dt
Уравнение цепи якоря: U яд сед Фд д R яд I яд L яд
Уравнение цепи возбуждения:
Уравнение магнитной
цепи :
Фвд
Iвг при Iвг Iвнасг
при Iвд Iвнасд
Фвг г Sign при
Фнасг
Iвг
Iвг Iвнасг
Фнасд Sign Iвд при Iвд Iвнасд
д Iвд
Мэмг М fг Мтрсг Мдинг ;
М эмг смг Фг Iяг
d
Мдинг Jг г Jг г
dt
Мэмд М fд Мтрсд Мдинд ;
Электромагнитный момент ;
Мэмд смд Фд Iяд
d
Динамический момент:
Мдинд J д д Jд д
dt
Уравнение моментов:
Момент сухих трений
на валу:
Мтрд
Мтрсд Sign д при д 0
(Мэмд - М fд) при д 0 и
Мэмд М fд М трсд Мтрд
М трсд Sign (Мэмд - М fд) при д 0
и Мэмд М fд М трсд
U яд U яг U я
Уравнения связи:
и
Iяд I яг I я
сег Фг г сед Фд д R яд Iя R яг I я Lяд
где:
R ягд R яг R яд
и
Мтрсд Sign д при д 0
(Мэмд - М fд) при д 0 и
Мэмд М fд М трсд
М трсд Sign (Мэмд - М fд)
при д 0 и М эмд - М fд М трсд
d
d
d
L
Iя
R
I
L
I
ягд
ягд я
я
Iя яг
dt
dt
dt
Lягд Lяг Lяд
(29)
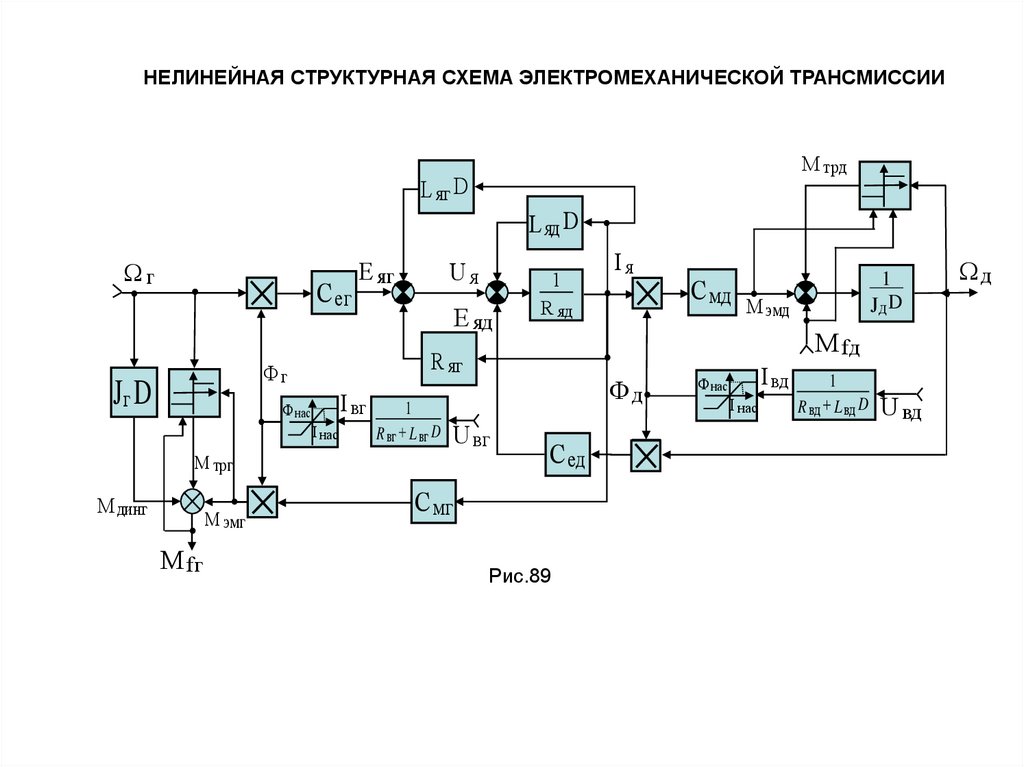
77.
НЕЛИНЕЙНАЯ СТРУКТУРНАЯ СХЕМА ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИИМ трд
L яг D
L яд D
г
С ег
Е яд
I вг
Ф нас
I нас
1
R вг L вг D
М трг
М динг
М эмг
М fг
1
R яд
Iя
Фд
U вг
С мд
1
JД D
М эмд
М fд
R яг
Фг
Jг D
Uя
Е яг
С ед
С мг
Рис.89
I вд
Ф нас
I нас
1
R вд L вд D
U вд
д
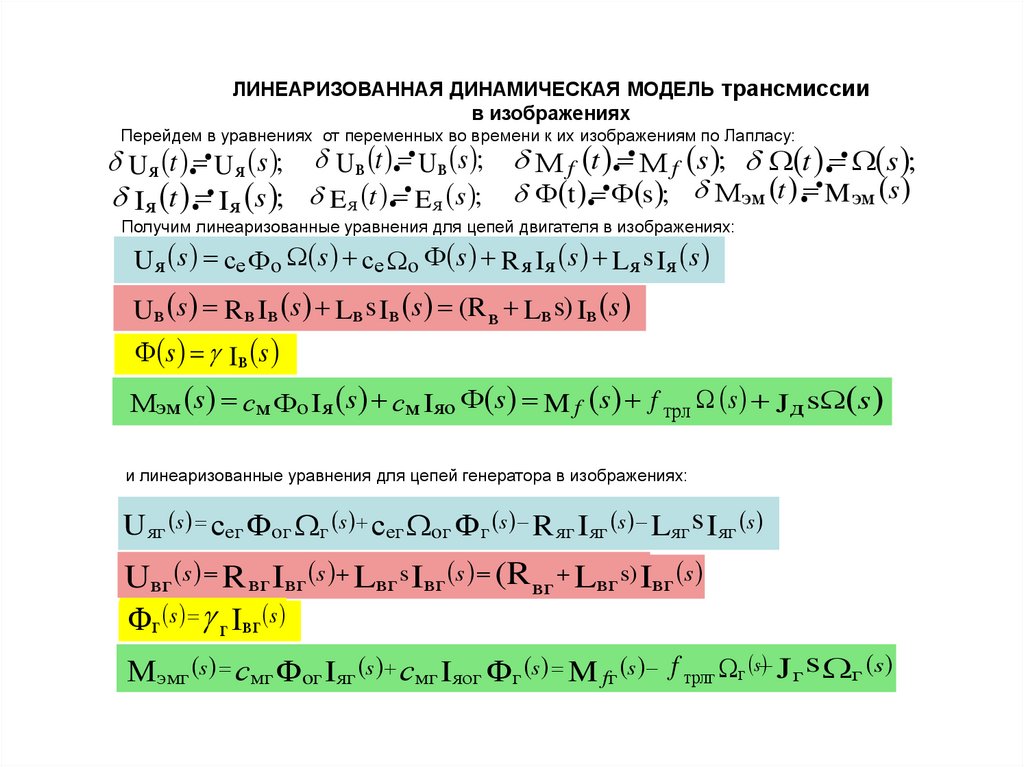
78.
ЛИНЕАРИЗОВАННАЯ ДИНАМИЧЕСКАЯ МОДЕЛЬ трансмиссиив изображениях
Перейдем в уравнениях от переменных во времени к их изображениям по Лапласу:
U я t U я s ; Uв t Uв s ;
Iя t Iя s ; E я t E я s ;
М f t М f s ; t s ;
Ф t Ф s ; М эм t M эм s
Получим линеаризованные уравнения для цепей двигателя в изображениях:
U я s се Фo s се o Ф s R я Iя s Lя s Iя s
Uв s R в Iв s Lв s Iв s (R в Lв s) Iв s
Ф s Iв s
Мэм s см Фo Iя s см Iяо Ф s M f s f трл s J д s s
и линеаризованные уравнения для цепей генератора в изображениях:
U яг s сег Фoг г s сег oг Фг s R яг Iяг s Lяг s Iяг s
Uвг s R вг Iвг s Lвг s Iвг s (R вг Lвг s) Iвг s
Фг s г Iвг s
Мэмг s смг Фoг Iяг s смг Iяог Фг s M fг s f трлг г s Jг s г s
79.
ЛИНЕАРИЗОВАННАЯ СТРУКТУРНАЯ СХЕМА ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИИМ трд
г
С ег
Ф го
Е яг
Фг
М динг
М эмг
М fг
г
I вг
С мг
С мд
Ф до
М эмд
1
R вг L вг s
Фд
U вг
д I вд
до
С ед
д
1
JДs
М fд
I яо
I яо
М трг
Iя
Е яд
го
J г s f трг
1
R ягд L ягд s
f трд
1
R вд L вд s
U вд
Ф до
Ф го
Рис.90
Примечания:
-Переменные в схеме Рис.52 являются изображениями по Лапласу отклонений соответствующих
переменных от их значений в выбранной точке линеаризации;
- s - комплексная переменная преобразования Лапласа;
- R ягд R яг R яд - суммарное активное сопротивление якорной цепи двух машин;
- L ягд L яг L яд - суммарная индуктивность якорной цепи двух машин;
- f трг , f трд - коэффициенты линеаризованных трений на валах генератора и двигателя.
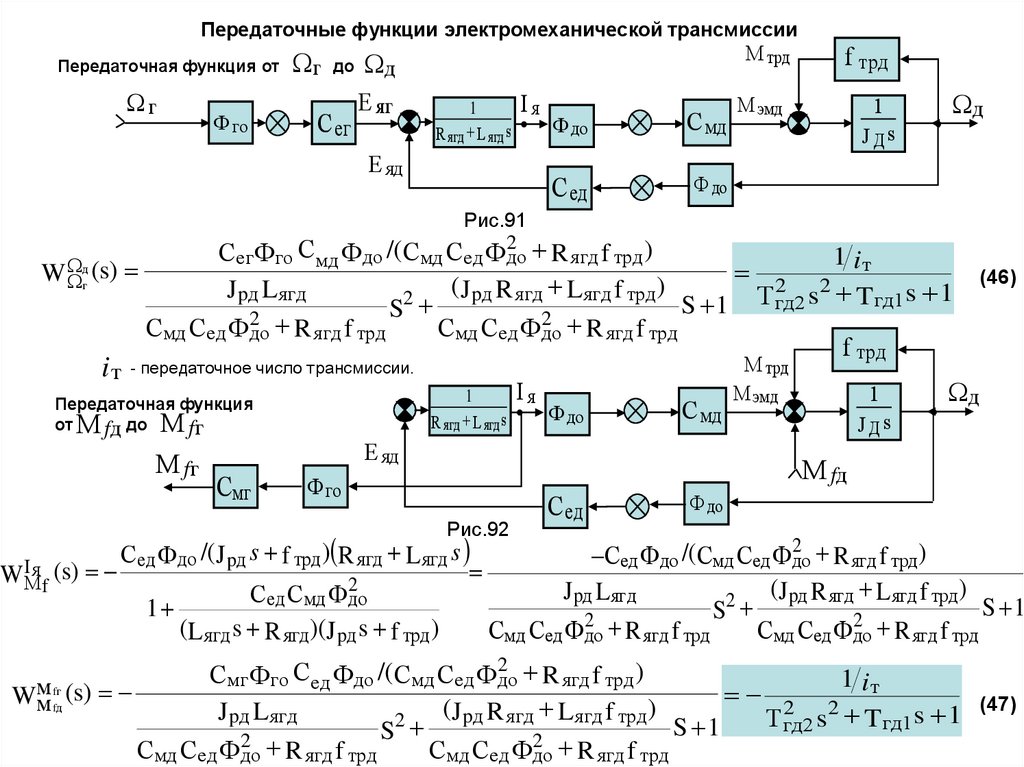
80.
Передаточные функции электромеханической трансмиссииПередаточная функция от
г
Ф го
г
до
С ег
М трд
д
Е яг
1
R ягд L ягд s
Iя
Е яд
д
W
г (s)
iт
W IМя f (s)
С мд
С ед
Ф до
Рис.91
Сег Фго Смд Фдо /(Смд Сед Ф2до R ягд f трд )
(
)
J pд L ягд
2 J pд R ягд L ягд f трд S 1
S
2
Смд Сед Фдо R ягд f трд
Смд Сед Ф2до R ягд f трд
- передаточное число трансмиссии.
1
R ягд L ягд s
Передаточная функция
от
fг
fд до
М
Ф до
М
М fг
Смг
Ф до
С мд
Е яд
(Lягд s R ягд)(J pд s f трд )
М эмд
1
д
JДs
1 iт
2
s2 Tгд1s 1
Тгд2
М трд
М эмд
(46)
f трд
1
д
JДs
М fд
Ф го
Рис.92
Сед Фдо /( J pд s f трд ) R ягд Lягд s
2
Сед Смд Фдо
1
Iя
f трд
С ед
Ф до
Сед Фдо /(Смд Сед Ф2до R ягд f трд )
(
)
J pд Lягд
2 J pд R ягд L ягд f трд S 1
S
2
Смд Сед Фдо R ягд f трд
Смд Сед Ф2до R ягд f трд
Сед Фдо /(Смд Сед Ф2до R ягд f трд )
С
Ф
го
мг
1 iт
fг (s)
Wм
мfд
2
2
(
)
J pд Lягд
s
Т
Tгд1s 1
2 J pд R ягд L ягд f трд S 1
гд2
S
Смд Сед Ф2до R ягд f трд
Смд Сед Ф2до R ягд f трд
(47)
81.
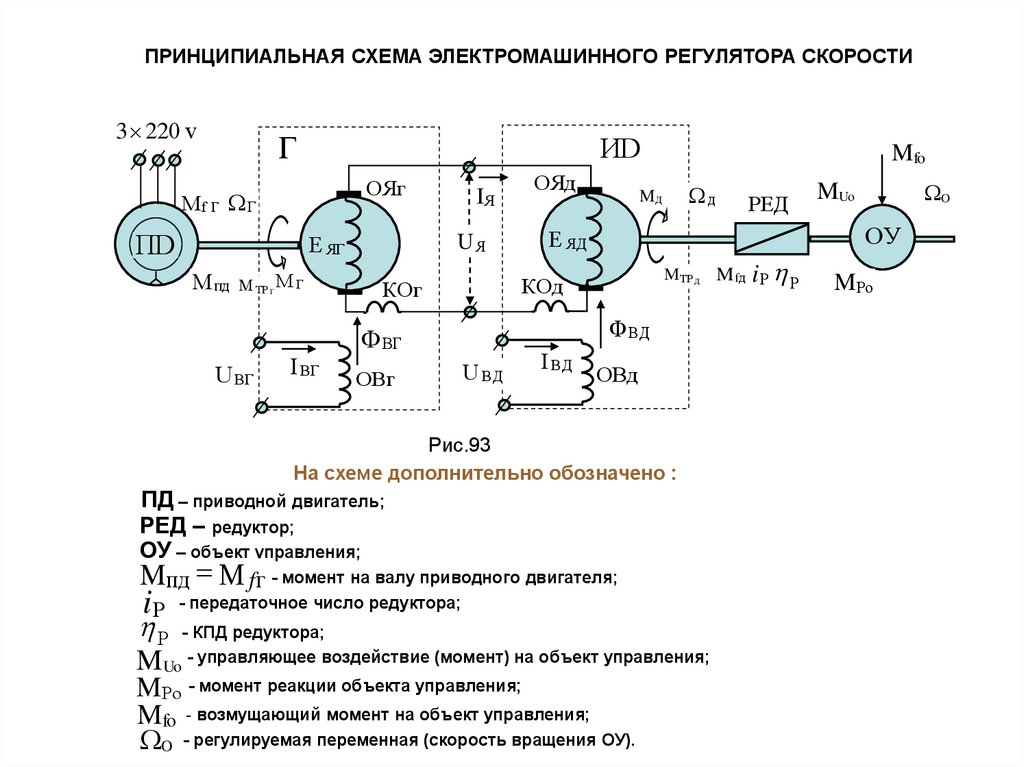
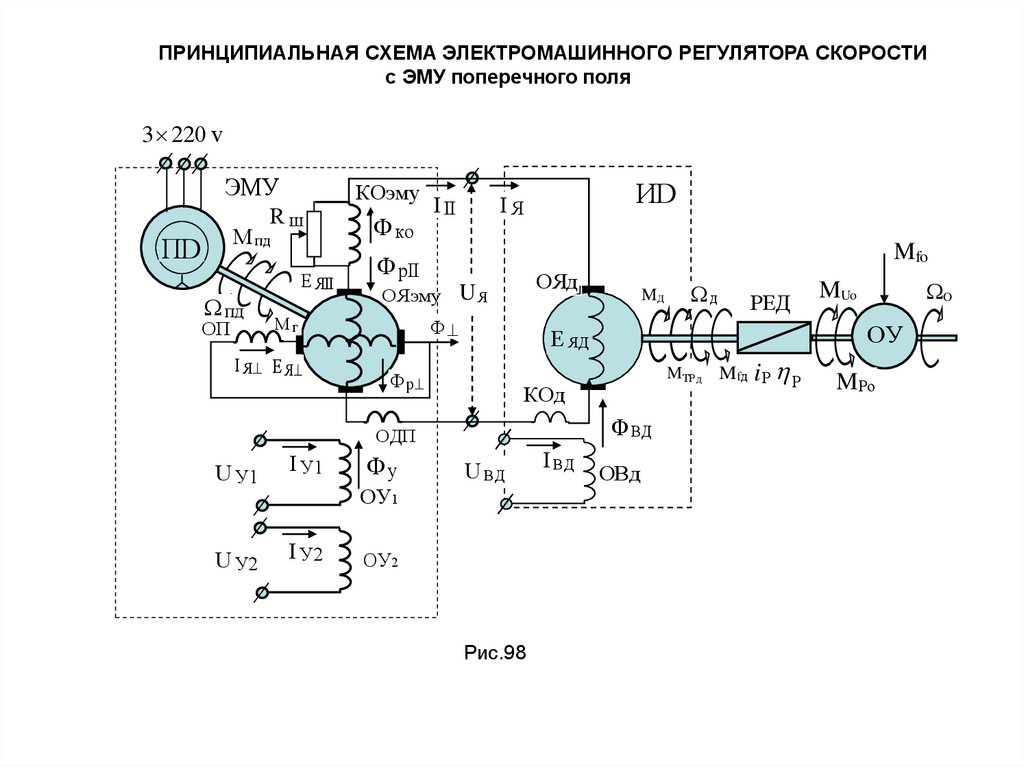
ПРИНЦИПИАЛЬНАЯ СХЕМА ЭЛЕКТРОМАШИННОГО РЕГУЛЯТОРА СКОРОСТИ3 220 v
Г
ИD
ОЯг
Mf Г Г
ПD
E ЯГ
M пд
M ТР Г M Г
IЯ
UЯ
I BГ
ОВг
д
MД
I BД
O
MUo
ОУ
MТР Д
Ф BД
U BД
РЕД
E ЯД
КОд
КОг
Ф BГ
U BГ
ОЯд
Mfo
ОВд
Рис.93
На схеме дополнительно обозначено :
ПД – приводной двигатель;
РЕД – редуктор;
ОУ – объект управления;
Mпд М fг - момент на валу приводного двигателя;
i Р - передаточное число редуктора;
Р
- КПД редуктора;
- управляющее воздействие (момент) на объект управления;
Uo
M
MРo - момент реакции объекта управления;
Mfo - возмущающий момент на объект управления;
O - регулируемая переменная (скорость вращения ОУ).
Mfд i Р Р
MРo
82.
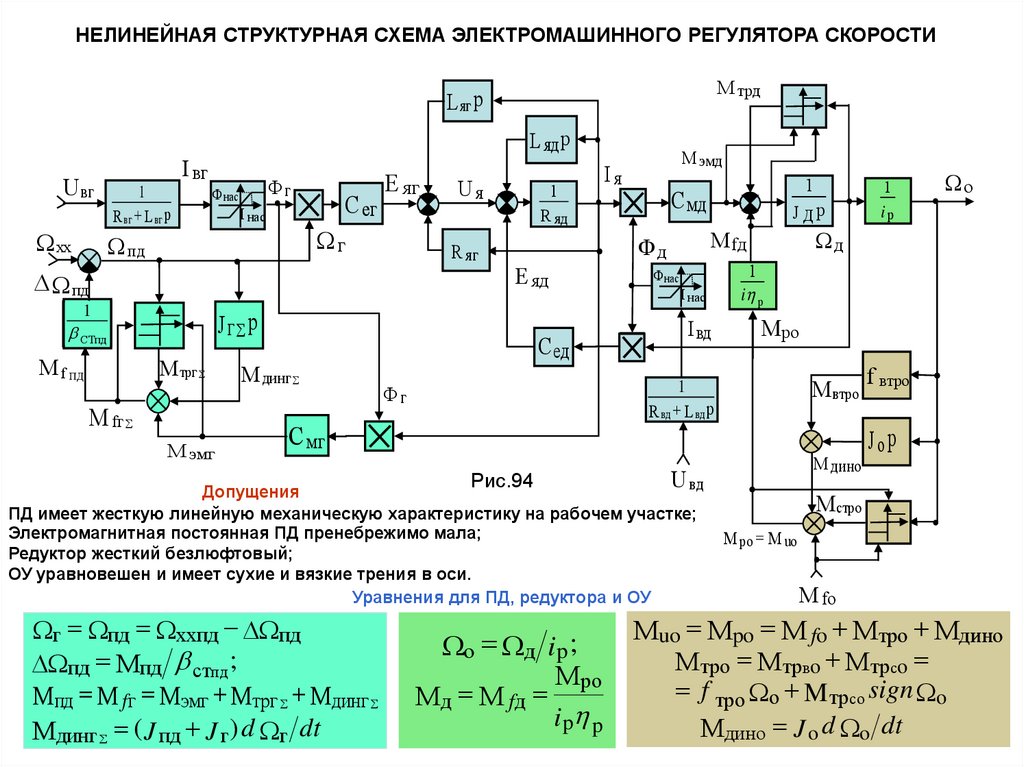
НЕЛИНЕЙНАЯ СТРУКТУРНАЯ СХЕМА ЭЛЕКТРОМАШИННОГО РЕГУЛЯТОРА СКОРОСТИМ трд
L яг p
L яд р
U вг
хх
I вг
1
R вг L вг p
Фг
Ф нас
С ег
I нас
Е яг
г
пд
R яг
пд
1
1
R яд
Е яд
М трг
М fг
М эмг
М динг
С ед
1
С мд
JДр
Ф нас
I нас
I вд
Мро
М втро
С мг
Рис.94
г пд ххпд пд
пд Мпд стпд ;
Мпд М fг Мэмг Мтрг Мдинг
Мдинг ( J пд J г ) d г dt
о д ip ;
М ро
М д М fд
i p p
М дино
U вд
Допущения
ПД имеет жесткую линейную механическую характеристику на рабочем участке;
Электромагнитная постоянная ПД пренебрежимо мала;
Редуктор жесткий безлюфтовый;
ОУ уравновешен и имеет сухие и вязкие трения в оси.
Уравнения для ПД, редуктора и ОУ
о
1
i р
1
R вд L вд р
Фг
1
iр
д
М fд
Фд
J Г p
СТпд
М f ПД
Uя
М эмд
Iя
f втро
Jор
М стро
М ро М uo
М fо
Мuo Мpo М fo Мтрo Мдинo
М трo М тpвo М трсo
f тро о M трсо sign o
Мдинo J o d o dt
83.
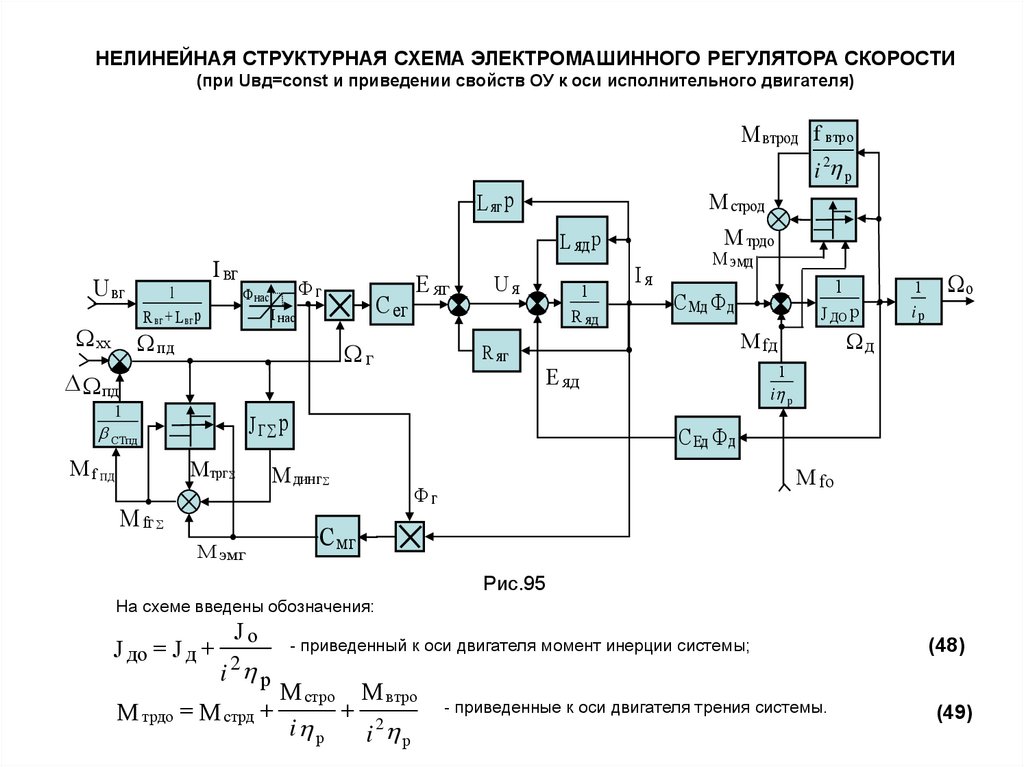
НЕЛИНЕЙНАЯ СТРУКТУРНАЯ СХЕМА ЭЛЕКТРОМАШИННОГО РЕГУЛЯТОРА СКОРОСТИ(при Uвд=const и приведении свойств ОУ к оси исполнительного двигателя)
М втрод f втро
i 2 р
L яг p
М строд
М трдо
L яд р
I вг
U вг
хх
1
R вг L вг p
Фг
Ф нас
пд
г
пд
1
Uя
R яг
1
R яд
М трг
М fг
М эмг
Iя
1
С Мд Ф д
J ДО р
1
iр
о
д
М fд
1
i р
Е яд
J Г p
СТпд
М f ПД
С ег
I нас
Е яг
М эмд
С Ед Ф д
М динг
М fо
Фг
С мг
Рис.95
На схеме введены обозначения:
J о - приведенный к оси двигателя момент инерции системы;
J до J д 2
i p
М стро M втро
- приведенные к оси двигателя трения системы.
2
М трдо М стрд
i p
i p
(48)
(49)
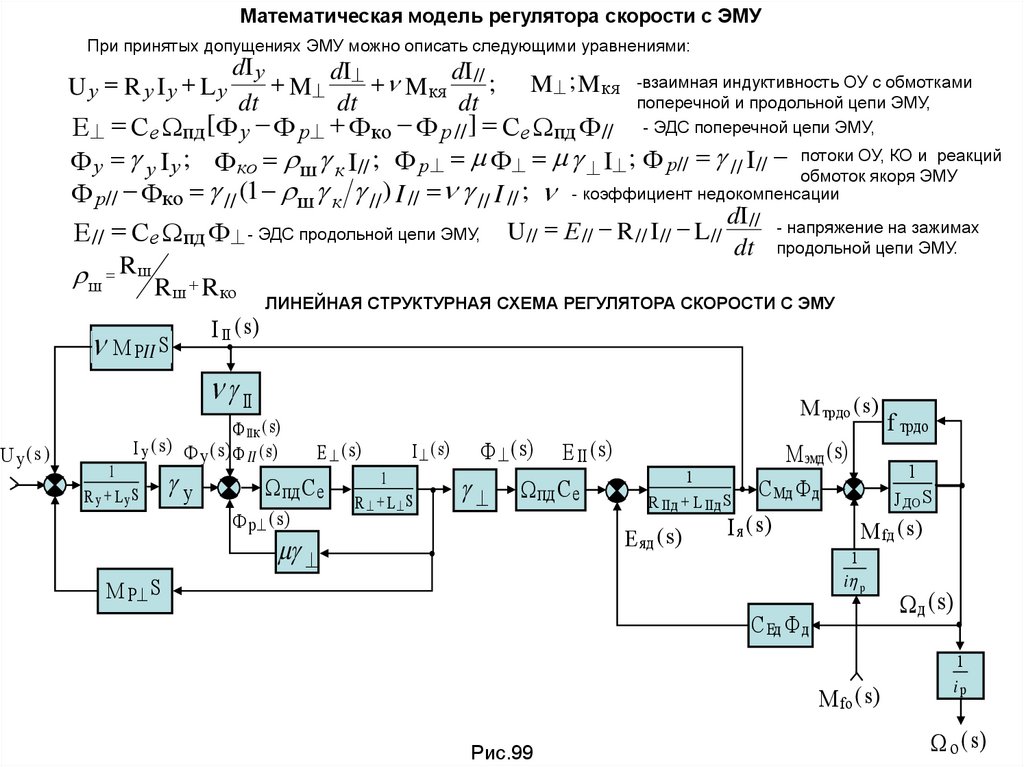
84.
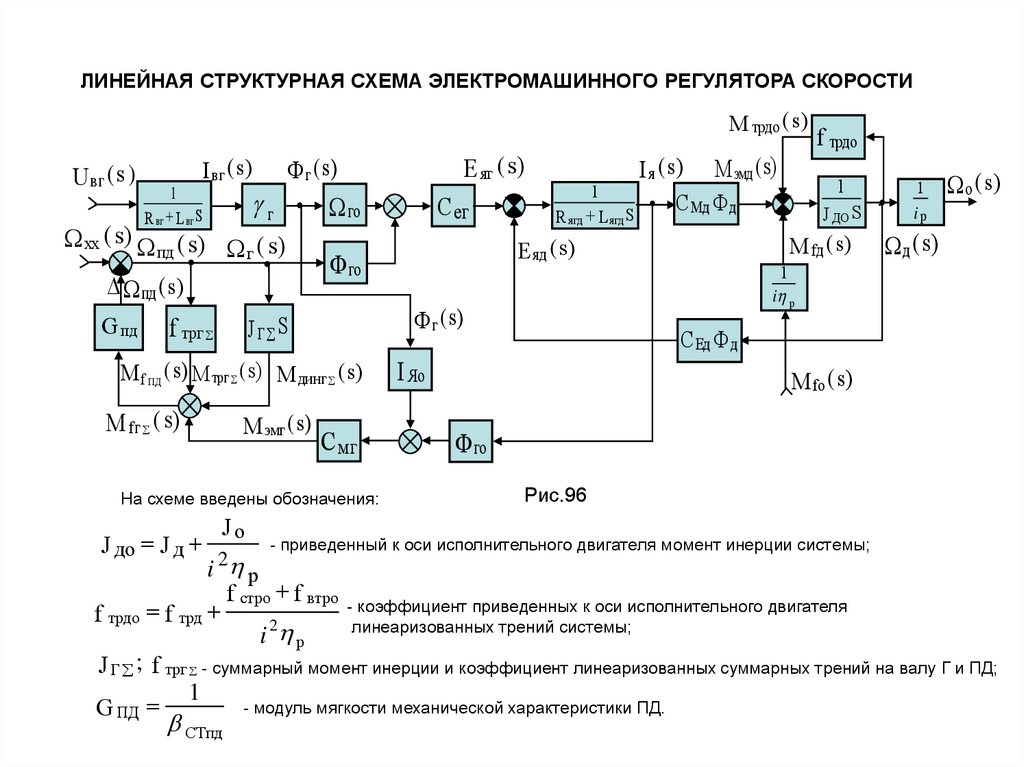
ЛИНЕЙНАЯ СТРУКТУРНАЯ СХЕМА ЭЛЕКТРОМАШИННОГО РЕГУЛЯТОРА СКОРОСТИМ трдо ( s)
U вг ( s )
1
R вг L вг S
г
хх ( s) пд ( s) г ( s)
пд ( s)
G пд
f трг
го
1
R ягд L ягд
С мг
На схеме введены обозначения:
I я ( s) М эмд ( s)
С Мд Ф д
S
1
J ДО S
М fд ( s)
Е яд ( s)
Ф г ( s)
J Г S
М эмг ( s)
С ег
Ф го
М f ПД ( s) М трг ( s) М динг ( s)
М fг ( s)
Е яг ( s)
Ф г ( s)
I вг ( s)
f трдо
1
iр
о ( s)
д ( s)
1
i р
С Ед Ф д
I Яо
М fо ( s)
Ф го
Рис.96
Jо
- приведенный к оси исполнительного двигателя момент инерции системы;
J до J д 2
i p
f стро f втро - коэффициент приведенных к оси исполнительного двигателя
f трдо f трд
линеаризованных трений системы;
i 2 p
J Г ; f трг - суммарный момент инерции и коэффициент линеаризованных суммарных трений на валу Г и ПД;
1
- модуль мягкости механической характеристики ПД.
G ПД
СТпд
85.
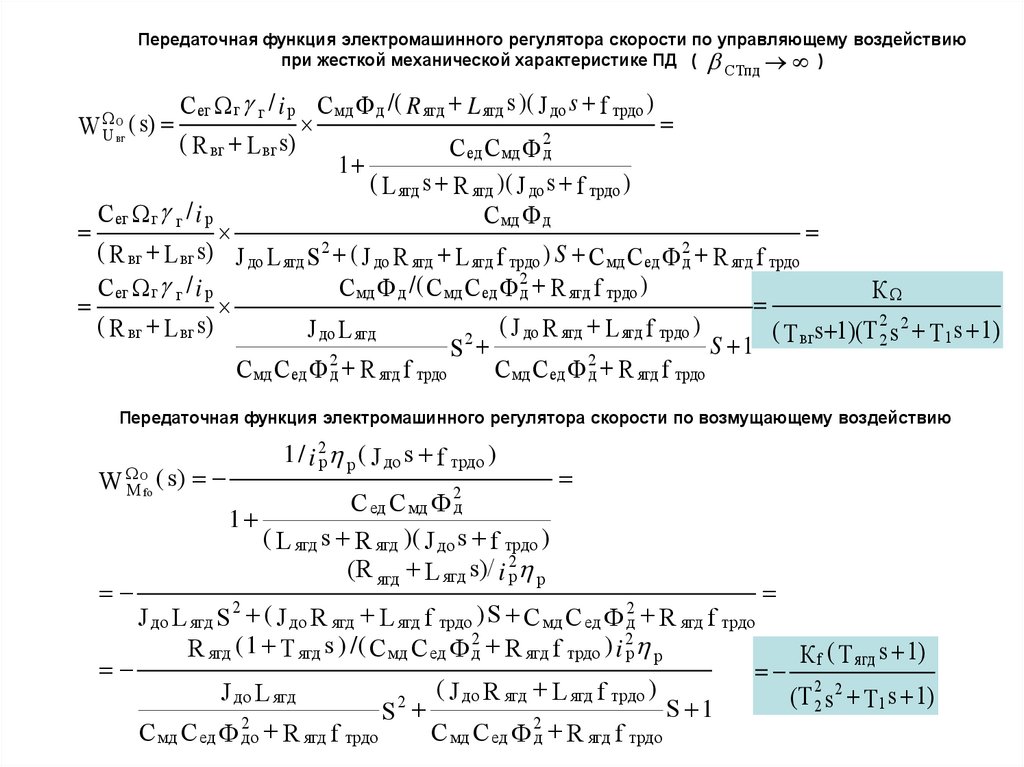
Передаточная функция электромашинного регулятора скорости по управляющему воздействиюпри жесткой механической характеристике ПД (
)
СТпд
С ег г г / i p C мд Ф д /( R ягд L ягд s )( J до s f трдо )
2
( R вг L вг s)
С ед С мд Ф д
1
( L ягд s R ягд )( J до s f трдо )
С ег г г / i p
C мд Ф д
( R вг L вг s) J до L ягд S 2 ( J до R ягд L ягд f трдо ) S C мд С ед Ф 2д R ягд f трдо
С ег г г / i p
С мд Ф д /( С мд С ед Ф 2д R ягд f трдо )
К
( R вг L вг s)
( J до R ягд L ягд f трдо )
J до L ягд
( Т вгs 1)(Т 22 s 2 T 1 s 1)
2
S 1
S
2
2
С мд С ед Ф д R ягд f трдо
С мд С ед Ф д R ягд f трдо
W U Овг ( s)
Передаточная функция электромашинного регулятора скорости по возмущающему воздействию
1 / i 2p p ( J до s f трдо )
W МОfо ( s)
1
С ед С мд Ф 2д
( L ягд s R ягд )( J до s f трдо )
(R ягд L ягд s)/ i 2p p
J до L ягд S ( J до R ягд L ягд f трдо ) S C мд С ед Ф 2д R ягд f трдо
2
R ягд ( 1 Т ягд s ) /( С мд С ед Ф 2д R ягд f трдо ) i p p
2
( J до R ягд L ягд f трдо )
J до L ягд
S 1
S2
2
2
С мд С ед Ф до R ягд f трдо
С мд С ед Ф д R ягд f трдо
К f ( Т ягд s 1)
(Т 22 s 2 T 1 s 1)
86.
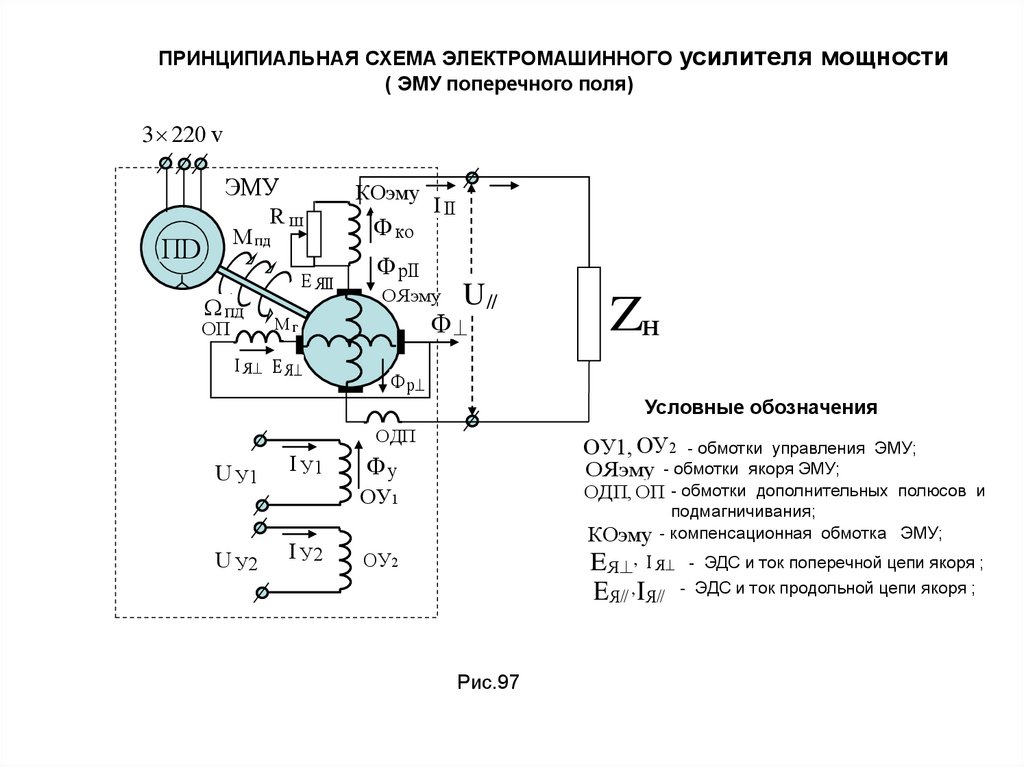
ПРИНЦИПИАЛЬНАЯ СХЕМА ЭЛЕКТРОМАШИННОГО( ЭМУ поперечного поля)
усилителя мощности
3 220 v
ЭМУ
Rш
M пд
ПD
пд
ОП
E ЯII
КОэму
Ф ко
Ф рII
ОЯэму
U //
Ф
Mг
I Я E Я
I II
Zн
Ф р
Условные обозначения
ОДП
U У1
U У2
I У1
ОУ1, ОУ2 - обмотки управления
ОЯэму - обмотки якоря ЭМУ;
Фу
ОДП, ОП - обмотки дополнительных полюсов и
ОУ1
I У2
ЭМУ;
КОэму
ОУ2
подмагничивания;
- компенсационная обмотка ЭМУ;
EЯ , I Я - ЭДС и ток поперечной цепи якоря ;
EЯ// , IЯ// - ЭДС и ток продольной цепи якоря ;
Рис.97
87.
ПРИНЦИПИАЛЬНАЯ СХЕМА ЭЛЕКТРОМАШИННОГО РЕГУЛЯТОРА СКОРОСТИс ЭМУ поперечного поля
3 220 v
ЭМУ
Rш
M пд
ПD
пд
ОП
E ЯII
КОэму
Ф ко
ИD
IЯ
Mfo
Ф рII
ОЯэму
Mг
I Я E Я
I II
ОЯд
UЯ
Ф
I У1
Ф р
U У2
I У2
Фу
д
РЕД
MТР Д
КОд
Ф BД
U BД
ОУ1
ОУ2
Рис.98
I BД
O
MUo
ОУ
E ЯД
ОДП
U У1
MД
ОВд
Mfд i Р Р
MРo
88.
Математическая модель регулятора скорости с ЭМУПри принятых допущениях ЭМУ можно описать следующими уравнениями:
Uу R у Iу Lу
dI у
M dI Mкя dI // ;
dt
dt
dt
M ; Mкя
-взаимная индуктивность ОУ с обмотками
поперечной и продольной цепи ЭМУ,
- ЭДС поперечной цепи ЭМУ,
Е Се пд [Ф у Ф р Фко Ф р // ] Се пд Ф//
ОУ, КО и реакций
Ф у у I у ; Фко ш к I// ; Ф р Ф I ; Ф р// // I // потоки
обмоток якоря ЭМУ
Ф р// Фко // (1 ш к // ) I // // I // ; - коэффициент недокомпенсации
dI // - напряжение на зажимах
Е // Се пд Ф - ЭДС продольной цепи ЭМУ, U // Е // R // I // L //
dt продольной цепи ЭМУ.
ш Rш R R
ш
ко
ЛИНЕЙНАЯ СТРУКТУРНАЯ СХЕМА РЕГУЛЯТОРА СКОРОСТИ С ЭМУ
М РII S
I II ( s)
II
U у(s)
Ф IIк ( s)
I у ( s) Ф у ( s) Ф II ( s)
1
R у L уS
у
М трдо ( s)
Е ( s)
пд С е
Ф р ( s)
I ( s)
1
R L S
Ф ( s)
Е II ( s)
пд С е
М эмд ( s)
1
1
С
Ф
д
Мд
J ДО S
R IIд L IIд S
I я ( s)
М fд ( s)
Е яд ( s)
1
i р
М Р S
С Ед Ф д
М fо ( s)
Рис.99
f трдо
д ( s)
1
iр
o ( s)
89.
Схема одноплечевого ШИП с системой симметричного управленияИП
U гпн
U вх
TV 1
СУ
ГПН
СС
РИ
D1
U1
Г
Iн Iя
TV 2
- U вх
U гпн
Uп
2
t
Т
t
Т
t
Uн
Iн
Рис.100
ИП- импульсный преобразователь;
СУ- система симметричного управления;
ГПН- генератор пилообразного напряжения;
СС- схема сравнения;
РИ- распределитель импульсов;
У- усилители;
- относительная длительность импульса U1.
t
U
п
2
ЕЯ
Условные обозначения:
U1
U2
нагрузка
D2
U2
реверс
U вх
LЯ
RЯ
Uн Uя
У
Диаграммы напряжений
Uп
2
Рис.101
Uп
2
90.
Схема мостового ШИП с системой симметричного управленияИП
U гпн
СУ
U1
ГПН
U вх
СС
РИ
Временные диаграммы
U п
RЯ
Uн Uя
У
Iн Iя
TV 2
D3
ЕЯ
U4
D2
Рис.102
LЯ
нагрузка
TV 4
Uп
D4
U вх
- U вх
U гпн
U 2, U 3
U3
реверс
U вх
Т
TV 3
D1
U2
U 1, U 4
TV 1
t
- U вх
U гпн
t
U1
t
Т
Uн
U2
U4
t
Iн
U3
U п
t
Т
Т
Uн
Iн
t
U п
t
U п
Рис.103 Симметричное управление
Рис.104 Несимметричное управление
91.
Математические представления процессов в ШИПДля симметричного способа управления ШИП на периодах следования импульсов можно
записать:
Н
Н Н Н
Н
nT t n 1 T ,
при
Н
di
E
dt
di
при n 1 T t n 1 T ,
-U R I L
E
dt
U
U 2 для одноплечевых ИП и U U для мостовых схем ИП ,
U
R I L
Н
Н
Н
Н
Н
Н
П
где:
Н
Н
П
При симметричном способе управления напряжение на нагрузке знакопеременное.
Среднее его значение определяется как отношение интеграла за период к периоду Т.
Т
T
1
U пdt
U пdt 2 1 U п
для одноплечевых ИП ,
T
2
2
2
0
T
Т
T
1
1
Uнср Т UПdt T UПdt 2 1 U П для мостовых схем ИП ,
0
T
1
UНСР Т
0 , 0,5 и нср 0
При
У
Для несимметричного способа управления ШИП:
U
U
U
Н
R Н IН LН diН E Н
dt
di
0 R I L
E
dt
Т
при
Н
Н
U нср
Н
1
Т
Н
U dt U
П
0
при
Н
П
nT t n 1 T ,
n 1 T t n 1 T ,
среднее напряжение на нагрузке
92.
Статические характеристики ШИПU Н f U У
Регулировочная характеристика
UН v
при постоянных значениях
UП,IН.
250
200
150
100
50
U Н f U У
0
0,5
1
Рис.105
Нагрузочная характеристика
1,5
UУ v
U Н f I Н
UН v
212,2
212,1
212
211,9
211,8
0
10
20
Рис.106
30
IН А
при постоянных значениях
U П ,U У .
93.
Динамические модели ШИПМодель ШИП с симметричным способом управления
Uу
Uгпн
+
Uн
К
-
Uу
Uн
Relay
Рис.107
Рис.108
Модель ШИП с несимметричным способом управления
Uу
Uгпн
Uоп
+
+
-
+
+
+
+
Relay
+
+
К
Uн
+
Рис.109
В системах приводов ШИП обычно описывают звеном с малой
постоянной времени или с запаздыванием.
W s
Uу
U
KУ
, КУ Н
Ts 1
UУ
Relay
Uн
- коэффициент усиления ,
Т – постоянная времени, равная периоду выходного напряжения.
Рис.110
94.
Схема одноплечевого ШИП с релейным управлением токаИП
U1
TV 1
D1
RЯ
Uн Uя
U 2 TV 2
Uп
2
нагрузка
LЯ
ЕЯ
Iн Iя
D2
DT
Временные диаграммы
U1
Uп
2
U2 Т
Uп
2
I зад
t
Т
Uн
Iн
t
I зад
Iн Iя
I зад
Рис.111
U
п
2
Рис.112
t
95.
Бесконтактные двигатели постоянного тока (БДПТ)Обращенный двигатель постоянного тока
Fя
Fя
Fр
N
Fр
Fр
Ф
S
Fр
Fя
Fя
Uя
Рис.113
Функциональная схема БДПТ
Uя
ПК
ЭМП
ДПР
ЭМП – электромеханический
преобразователь;
ПК – полупроводниковый коммутатор,
Рис.114
ДПР – датчик положения ротора.
96.
Упрощенная схема БДПТ+
ПК
ЭМП
ФA
Ф AВ
Uя
N
А
S
N
С
В
ФВ
S
А
С
_
ДПР
Рис.115
В
97.
Реверсивная схема БДПТФАС
+
ПК
ЭМП
ФA
Uя
S
А
N
ФС
ФВС
С
В
ФВ
ДПР
_
Рис.116
98.
Функциональная схема БДПТ с импульсным управлениемПК
Uя
ЭМП
ДПР
ЭМП – электромеханический
преобразователь;
ПК – полупроводниковый коммутатор,
ДПР – датчик положения ротора.
УУ
УУ- устройство управления.
UУ
Рис.117
Функциональная схема БДПТ с релейно-импульсным управлением и ОС по скорости
Uя
ПК
ЭМП
UУ
ДПР
ТГ
Uя
ПК
ЭМП
У
ДПР
У
а)
Рис.118
б)
ТГ
UУ
99.
Функциональная схема БДПТ непрерывного действияДПР
УПУ
(СКВТ)
U m Cos
ФЧВ
Uоп
ФЧВ
U m Sin
UУ
УПТ
UA
A
N
УПТ
UУ
Рис.119
ЭМП
ФA
UB
B
S
ФВ
ФAВ