





 informatics
informatics software
softwareSimilar presentations:




")




Проектная деятельность. Проект “Робокар”
1.
Проектнаядеятельность
Проект
“Робокар”
Московский Политех
Робототехника
Бирюлин Б.С.
201-325
Руководитель: Идиатуллов
Т.Т.
2.
ЦЕЛЬ И ЗАДАЧИЦель проекта:
Изучение технологий беспилотного движения и модификация БПТС KIA
ProCeed для участия в полевых испытаниях робототехнических систем
РобоКРОСС. Разработка нового БПТС на базе автомобиля Kia Ceed SW.
Задачи:
-
Исследование БПТС;
Проектирование модификаций БПТС;
Разработка ПО под БПТС;
Тестирование работоспособности модификаций БПТС;
Подготовка технической документации.
Техническое обслуживание БПТС.
Создание новых систем управления в БПТС.
Добавления модульности в разработке нового БПТС.
2
3.
РОБОКРОСС«РОБОКРОСС – 2022» – это ежегодные соревнования, включающие испытания
мобильных робототехнических систем – беспилотных транспортных систем,
которые выполняют задания на специально оборудованной трассе полигона.
3
4.
ЗАДАНИЯ РОБОКРОСС-
Параллельная парковка,
Перпендикулярная парковка задним ходом,
Распознавание дорожных знаков и сигналов светофора,
Городская маршрутка
4
5.
ОБСЛЕДОВАНИЕ ЛОКАЛЬНЫХ СЕТЕЙ ПРОЕКТА① Отсутствие локальной
сети. Соединение по COMпорту.
Удалось восстановить по
файлам программ
управления БПТС для
РобоКросс 2018.
Выполнили:
Борис Бирюлин
Данил Емельянов
Анна Беляева
6.
ОБСЛЕДОВАНИЕ ЛОКАЛЬНЫХ СЕТЕЙ ПРОЕКТА②Локальная сеть. Связь
по протоколу UDP.
Удалось восстановить
по файлам программ
управления БПТС для
подготовки к
РобоКроссу
Выполнили:
Борис Бирюлин
Данил Емельянов
Анна Беляева
7.
СХЕМА РАЗРАБАТЫВАЕМОЙ ЛОКАЛЬНОЙСЕТИ БПТС
7
8.
Разработка СУП(Системы управленияпедалями)
Выполнил:
Вячеслав Крохалев
8
9.
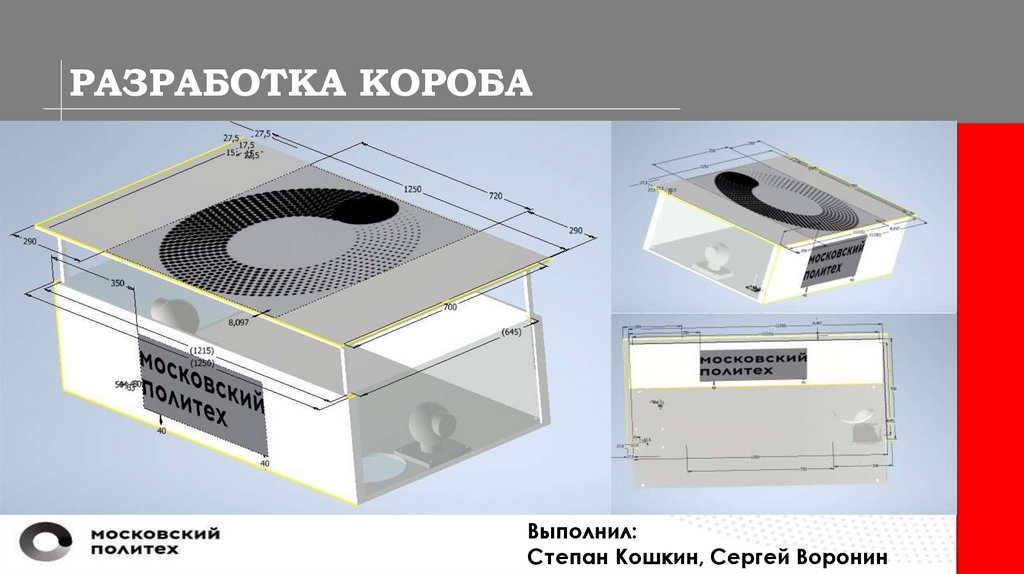
РАЗРАБОТКА КОРОБАВыполнил:
Степан Кошкин, Сергей Воронин
10.
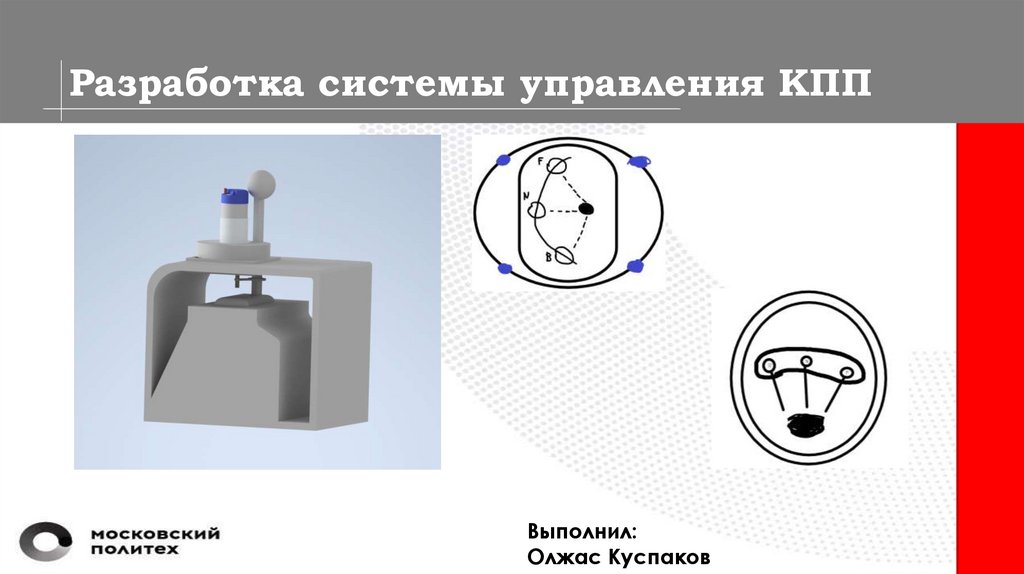
Разработка системы управления КППВыполнил:
Олжас Куспаков
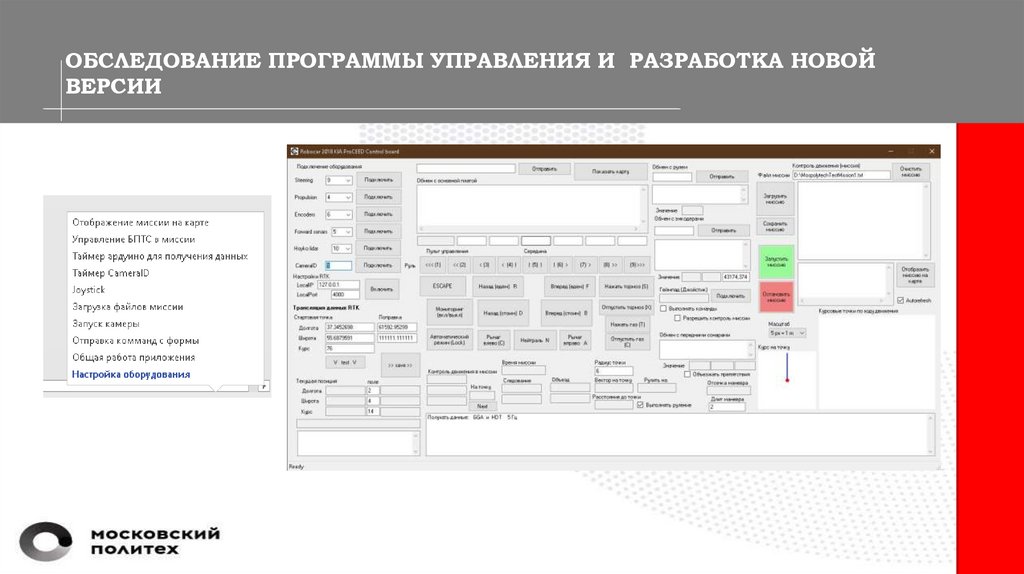
11.
ОБСЛЕДОВАНИЕ ПРОГРАММЫ УПРАВЛЕНИЯ И РАЗРАБОТКА НОВОЙВЕРСИИ
12.
Спасибо завнимание!