


 electronics
electronicsSimilar presentations:










Модуль технической (специальной) подготовки
1.
Кафедра ВКС ВУЦ при РТУ МИРЭАМодуль технической (специальной)
подготовки
Дисциплина «Техническая подготовка»
Раздел № 2. Основы радионавигации и средства
радиотехнического обеспечения полетов авиации
Руководитель занятия
полковник Белоус Сергей Ильич
1
2.
Основы радионавигации и средства радиотехнического обеспечения полетов авиацииТЕМА №3
Основные понятия радионавигации
Порядок изучения темы: Л1-2ч, ГЗ1-2ч
Занятие № 2 (групповое занятие)
Способы определения местоположения ЛА
УЧЕБНЫЕ ЦЕЛИ ЗАНЯТИЯ:
способы определения местоположения
1. Изучить
летательного
аппарата.
2. Ознакомиться с авиационными радионавигационными устройствами
и системами.
1.
2.
3.
УЧЕБНЫЕ ВОПРОСЫ:
Способы определения местоположения ЛА.
Классификация радионавигационных устройств и систем.
Принцип привода ЛА на аэродром с использованием радионавигационных
устройств.
2
3.
Способы определения местоположения ЛАВведение
Основой успешного самолетовождения является комплексное
применение технических средств, которое заключается в том, что
самолетовождение осуществляется с помощью не одного какоголибо средства, а нескольких. При этом результаты навигационных
определений, полученные с помощью одних средств, уточняются с
помощью других средств.
3
4.
1. Способы определения местоположения ЛА.Для определения местоположения
применяются следующие способы:
ЛА
в
навигации
способ линий (поверхностей) положения (ЛП) с использованием
радиотехнических, астрономических и др. систем;
способ
счисления
пути
(доплеровское,
инерциальное,
воздушное счисление пути и их комбинации);
обзорно-сравнительный способ (визуальная ориентировка,
сравнение
телевизионных,
радиолокационных
и
других
изображений
местности
с
соответствующими
картами,
корреляционно-экстремальная навигация по физическим полям
Земли).
4
5.
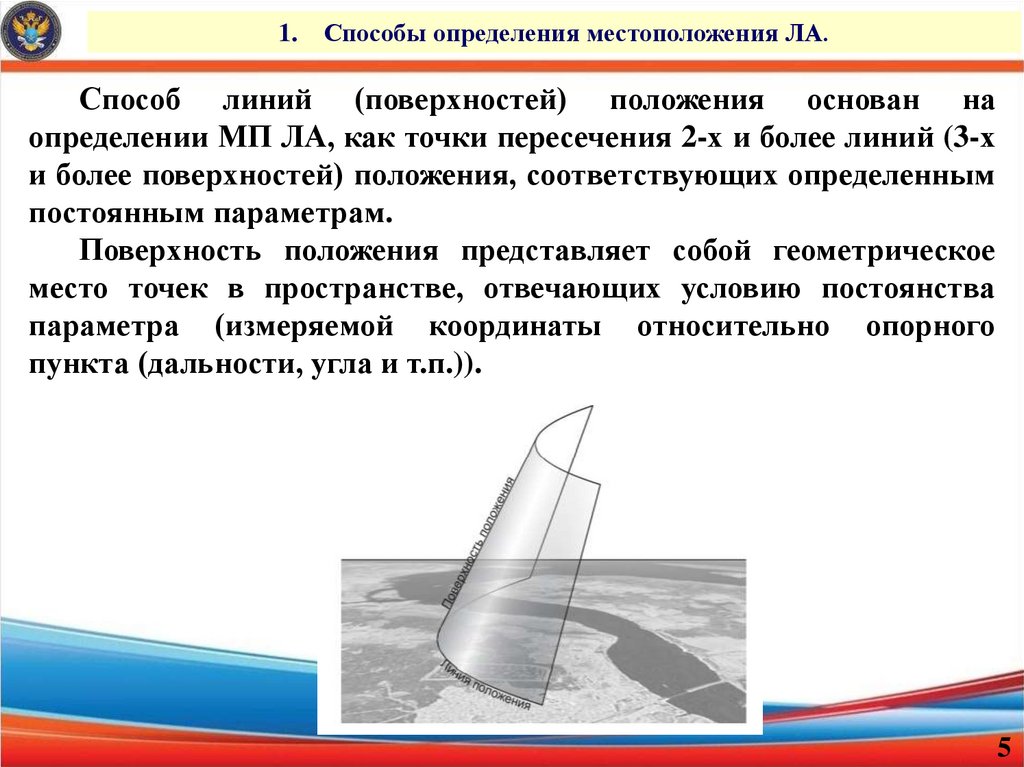
1. Способы определения местоположения ЛА.Способ линий (поверхностей) положения основан на
определении МП ЛА, как точки пересечения 2-х и более линий (3-х
и более поверхностей) положения, соответствующих определенным
постоянным параметрам.
Поверхность положения представляет собой геометрическое
место точек в пространстве, отвечающих условию постоянства
параметра (измеряемой координаты относительно опорного
пункта (дальности, угла и т.п.)).
5
6.
1. Способы определения местоположения ЛА.Если наклонная дальность до ЛА в 10 и более раз превышает его
высоту, то задачу определения МП ЛА (точки М на рис.1) решают
на плоскости. В зависимости от используемых ЛП и
соответствующих им радионавигационных систем, способ линий
положения подразделяется на 4 основных вида:
дальномерный метод;
угломерный (пеленгационный) метод;
разностно-дальномерный метод;
угломерно-дальномерный метод.
6
7.
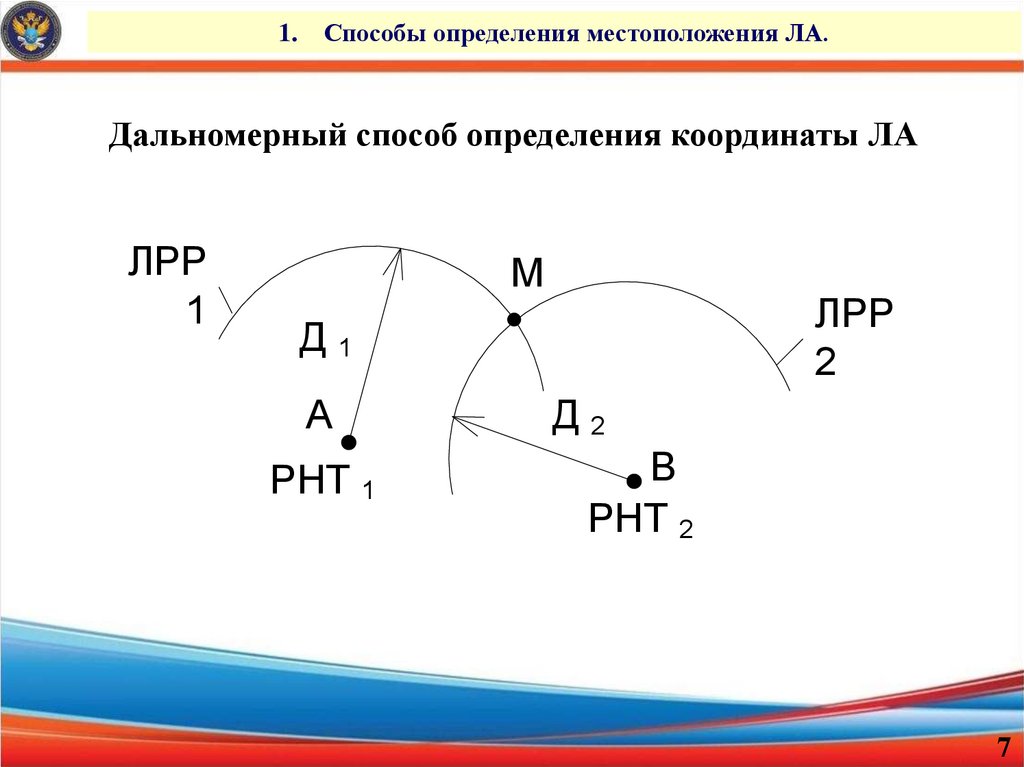
1. Способы определения местоположения ЛА.Дальномерный способ определения координаты ЛА
ЛРР
1
М
ЛРР
2
Д1
А
РНТ 1
Д2
В
РНТ 2
7
8.
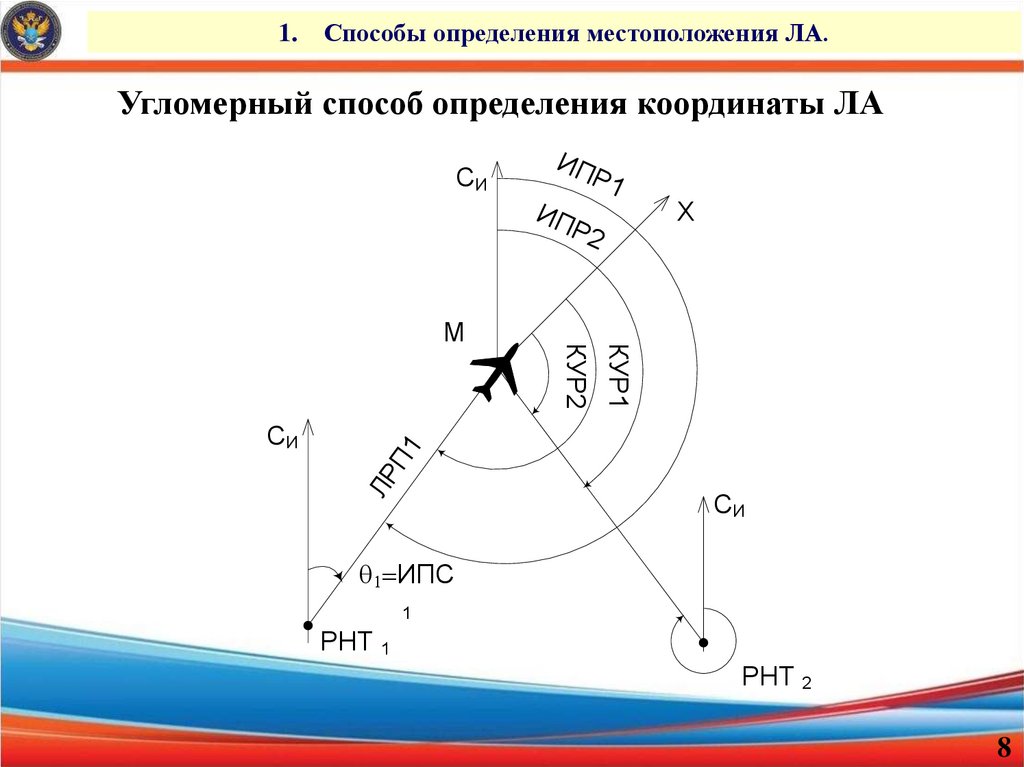
1. Способы определения местоположения ЛА.Угломерный способ определения координаты ЛА
СИ
ЛР
П1
Х
КУР1
СИ
КУР2
М
ИП
Р1
ИП
Р2
СИ
ИПС
1
РНТ 1
РНТ 2
8
9.
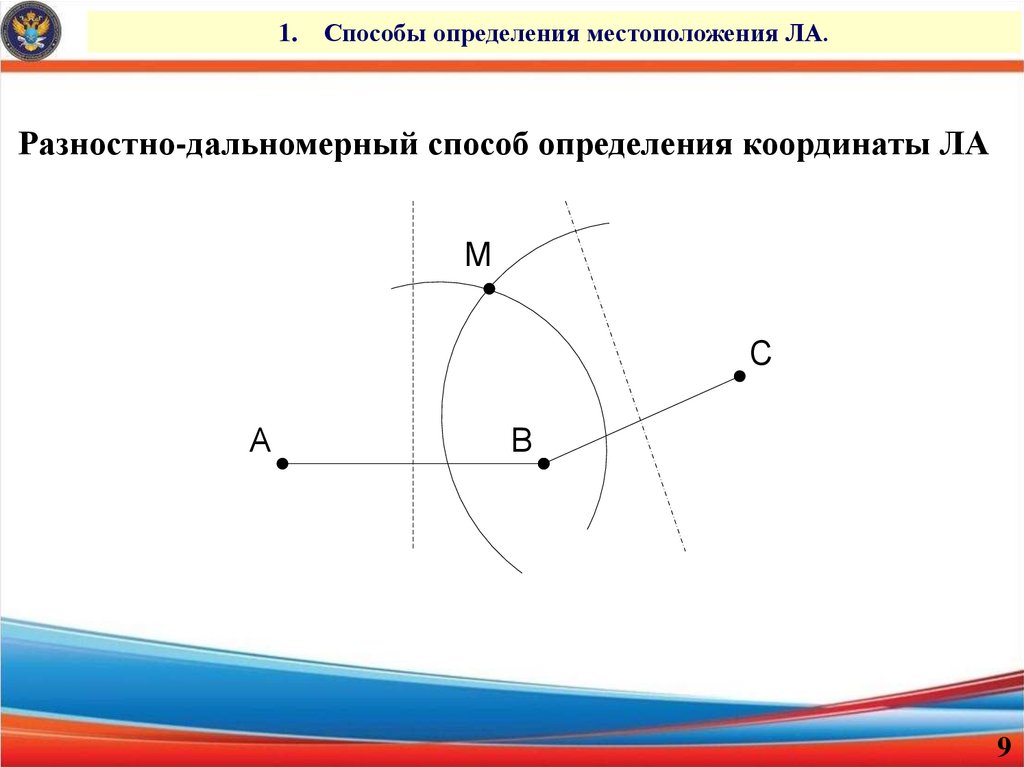
1. Способы определения местоположения ЛА.Разностно-дальномерный способ определения координаты ЛА
М
С
А
В
9
10.
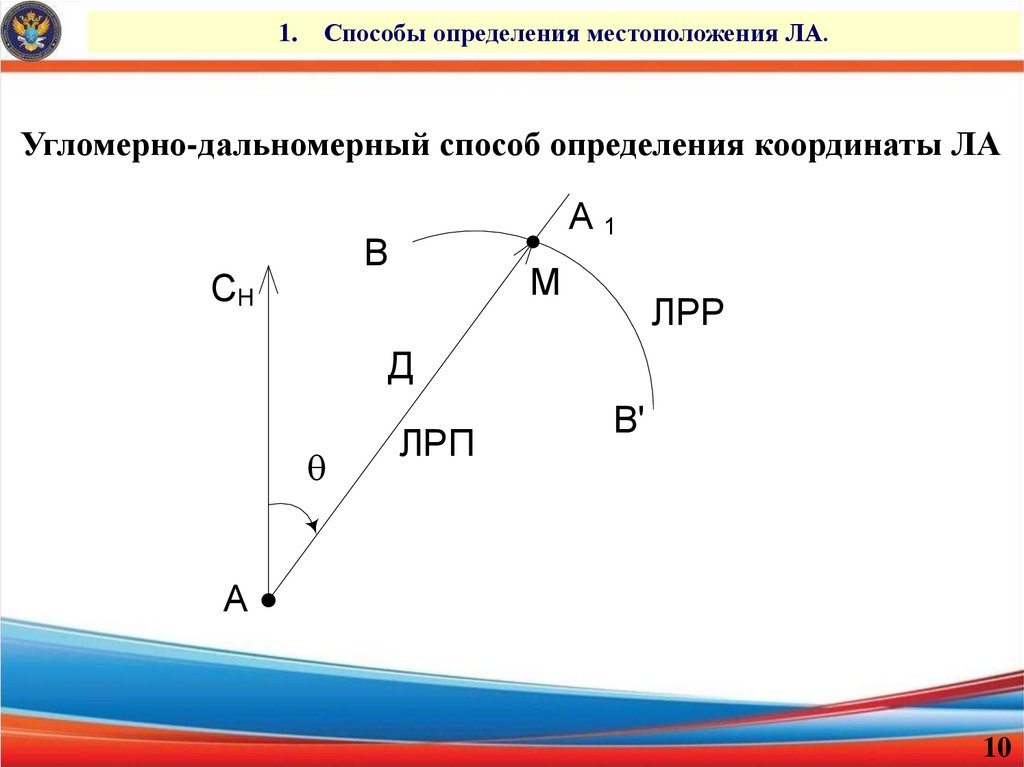
1. Способы определения местоположения ЛА.Угломерно-дальномерный способ определения координаты ЛА
А1
В
СН
М
ЛРР
Д
ЛРП
В'
А
10
11.
1. Способы определения местоположения ЛА.Все эти виды определения МП ЛА способом линий положения
требуют
нескольких
неподвижных
(или
закономерно
перемещающихся) РНТ, которые должны быть разнесены на
расстояния, соизмеримые с расстоянием от каждой из них до ЛА.
Это необходимо для исключения больших погрешностей оценки
МП ЛА.
Достоинством способа линий положения является определение
МП ЛА без учета и знания пройденного пути. Недостаток –
дискретная фиксация МП ЛА. Если засечка происходит с большим
интервалом времени, то этот способ комбинируют со способом
счисления пути или обзорно-сравнительным методом.
11
12.
1. Способы определения местоположения ЛА.Счислением пути называется способ определения координат МП
ЛА, основанный на вычислении пройденного пути относительно
известного начального положения ЛА. Для счисления пути
необходимо располагать данными о направлении (курсе) движения
ЛА и его ускорении или скорости движения относительно Земли.
Обзорно-сравнительный способ (метод) основан на определении
структуры какого-либо физического поля, характерного для
данной местности, и сравнении параметров этого поля с
параметрами,
введенными
в
запоминающее
устройство
навигационных систем или навигационными картами.
12
13.
2. Классификация радионавигационных устройств и систем.Основными
классификационными
признаками
РНС
являются:
1) назначение – глобальные РНС; РНС ближней и дальней
навигации; системы посадки; системы сближения и стыковки,
системы предупреждения столкновений;
2) характер источника информативного сигнала – активные,
активные с активным ответом, пассивные и многопозиционные
устройства и системы;
3) вид измеряемого навигационного параметра – угломерные
(пеленгационные);
дальномерные;
разностно-дальномерные;
комбинированные; измерители линейных и угловых координат;
4)
вид
информативного
параметра
радиосигнала,
используемого для определения навигационного параметра –
амплитудные, частотные, фазовые и временные;
5) степень автономности – автономные и неавтономные.
13
14.
2. Классификация радионавигационных устройств и систем.РНС можно подразделять по некоторым другим признакам:
по способам определения местоположения ВС – позиционные,
обзорно-сравнительные и счисления пути;
по дальности действия – РНС ближней навигации (до
400…450 км), дальней навигации (до 3000…3500 км) и глобальные
(неограниченная дальность действия);
по характеру излучения – с непрерывным (модулированным и
немодулированным), импульсным (с большой скважностью),
непрерывноимпульсным излучением (с малой скважностью), с
излучением шумоподобных сигналов;
по
степени
автоматизации
–
автоматические,
полуавтоматические и неавтоматические;
по способу индикации – с визуальной (стрелочный прибор,
цифровое табло) и слуховой индикацией.
14
15.
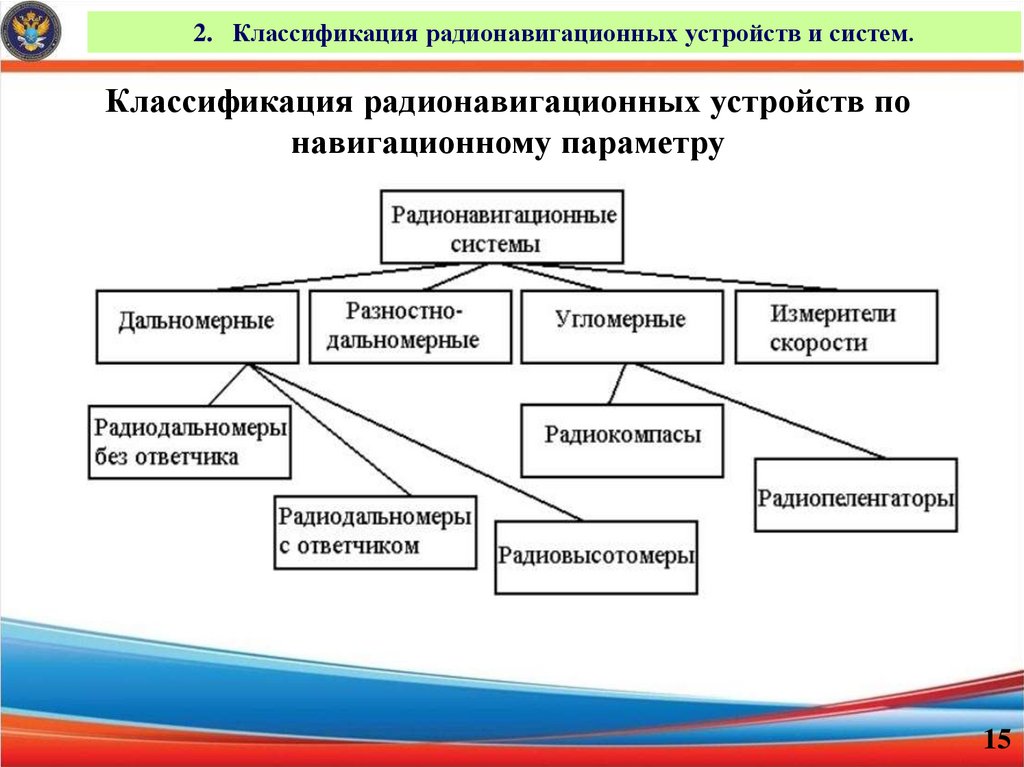
2. Классификация радионавигационных устройств и систем.Классификация радионавигационных устройств по
навигационному параметру
15
16.
2. Классификация радионавигационных устройств и систем.Классификация радионавигационных устройств по типу
радиотехнических измерений
16
17.
2. Классификация радионавигационных устройств и систем.Основная цель создания КСН состоит в достижении
наивысшей точности и надежности выполнения навигационных
измерений.
Под КСН понимают совокупность взаимосвязанных между
собой бортовых и наземных (либо только бортовых или наземных)
технических средств навигации, основанных на различных
принципах действия и предназначенных для совместного
измерения навигационных параметров (элементов) при решении
определенных навигационных задач.
Высокие точность и надежность в КСН достигаются путем
компенсации недостатков одних измерителей достоинствами
других.
17
18.
3. Принцип привода ЛА на аэродром с использованием радионавигационныхустройств.
Принцип работы радиокомпаса основан на направленном
приеме радиоволн. АРК включает в себя следующие основные
составные части:
поворотную рамочную антенну;
ненаправленную (шлейфовую) антенну;
приемник;
пульт управления;
указатель курсовых углов.
В состав АРК входят и другие вспомогательные, но необходимые
элементы: блок питания, антенный усилитель, коммутационная
коробка и т. п.
18
19.
3. Принцип привода ЛА на аэродром с использованием радионавигационныхустройств.
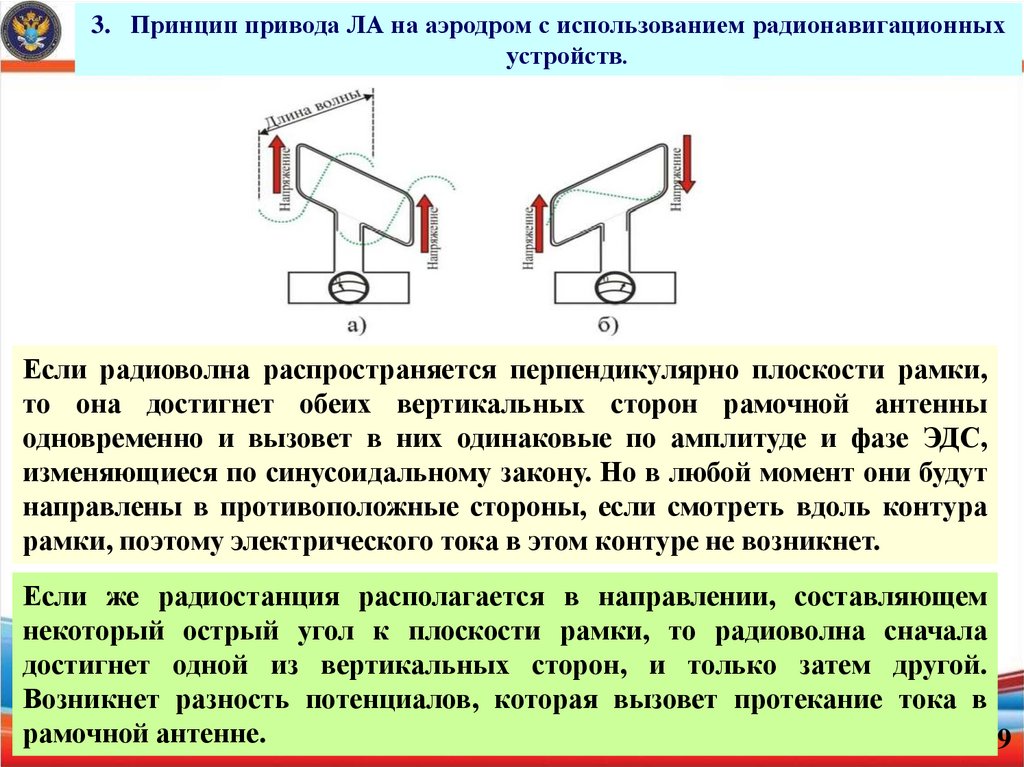
Если радиоволна распространяется перпендикулярно плоскости рамки,
то она достигнет обеих вертикальных сторон рамочной антенны
одновременно и вызовет в них одинаковые по амплитуде и фазе ЭДС,
изменяющиеся по синусоидальному закону. Но в любой момент они будут
направлены в противоположные стороны, если смотреть вдоль контура
рамки, поэтому электрического тока в этом контуре не возникнет.
Если же радиостанция располагается в направлении, составляющем
некоторый острый угол к плоскости рамки, то радиоволна сначала
достигнет одной из вертикальных сторон, и только затем другой.
Возникнет разность потенциалов, которая вызовет протекание тока в
рамочной антенне.
19
20.
3. Принцип привода ЛА на аэродром с использованием радионавигационныхустройств.
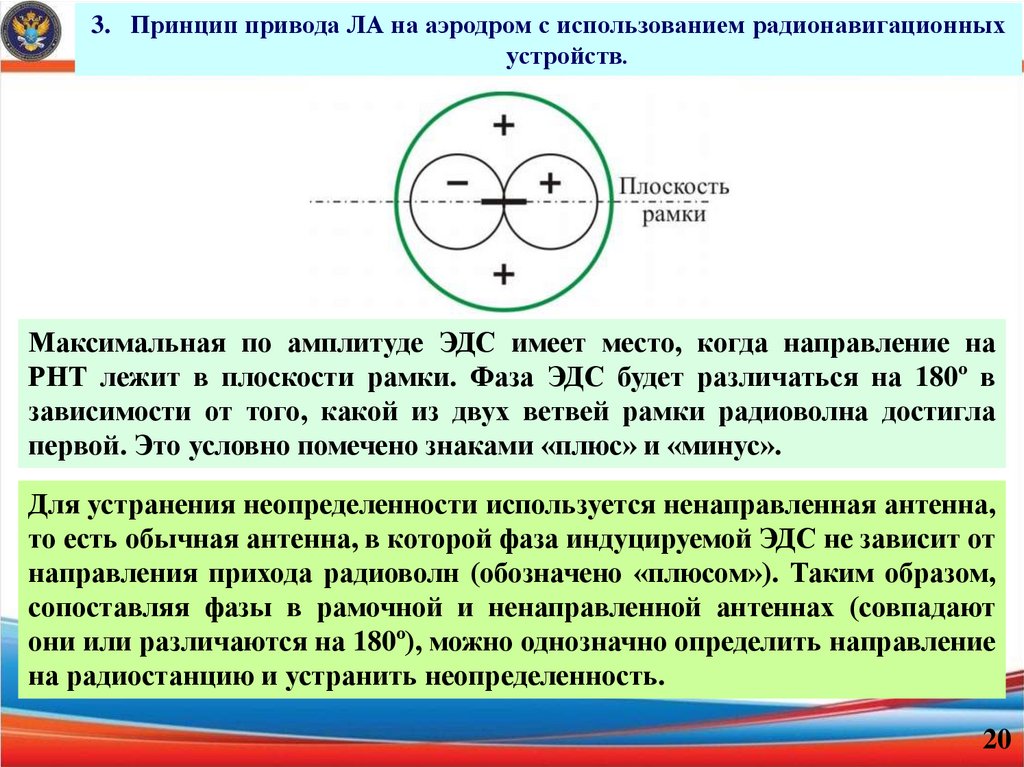
Максимальная по амплитуде ЭДС имеет место, когда направление на
РНТ лежит в плоскости рамки. Фаза ЭДС будет различаться на 180º в
зависимости от того, какой из двух ветвей рамки радиоволна достигла
первой. Это условно помечено знаками «плюс» и «минус».
Для устранения неопределенности используется ненаправленная антенна,
то есть обычная антенна, в которой фаза индуцируемой ЭДС не зависит от
направления прихода радиоволн (обозначено «плюсом»). Таким образом,
сопоставляя фазы в рамочной и ненаправленной антеннах (совпадают
они или различаются на 180º), можно однозначно определить направление
на радиостанцию и устранить неопределенность.
20
21.
3. Принцип привода ЛА на аэродром с использованием радионавигационныхустройств.
Упрощенная схема АРК
С помощью АРК определяется КУР
21
22.
3. Принцип привода ЛА на аэродром с использованием радионавигационныхустройств.
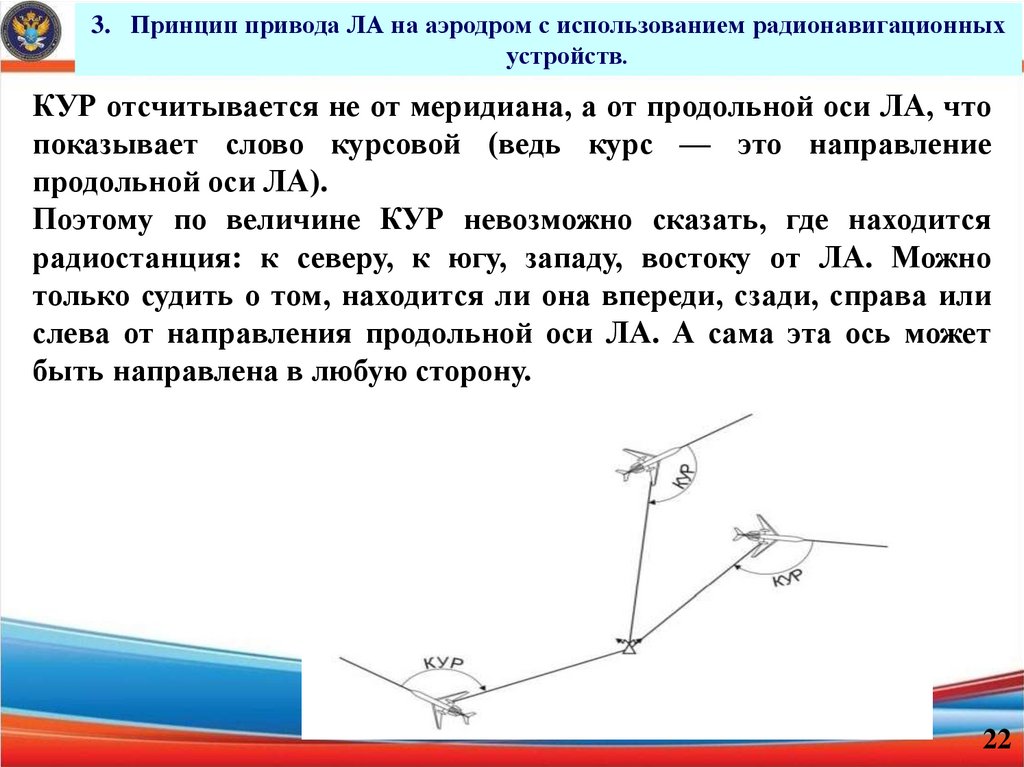
КУР отсчитывается не от меридиана, а от продольной оси ЛА, что
показывает слово курсовой (ведь курс — это направление
продольной оси ЛА).
Поэтому по величине КУР невозможно сказать, где находится
радиостанция: к северу, к югу, западу, востоку от ЛА. Можно
только судить о том, находится ли она впереди, сзади, справа или
слева от направления продольной оси ЛА. А сама эта ось может
быть направлена в любую сторону.
22
23.
3. Принцип привода ЛА на аэродром с использованием радионавигационныхустройств.
Во внеаэродромном воздушном пространстве (на воздушных
трассах) ОПРС как раз и располагают в ППМ, чтобы
облегчить экипажу выдерживание ЛЗП.
Традиционно рассматривают три «классических» способа
полета по ЛЗП с помощью радиокомпаса:
пассивный,
курсовой,
активный.
23
24.
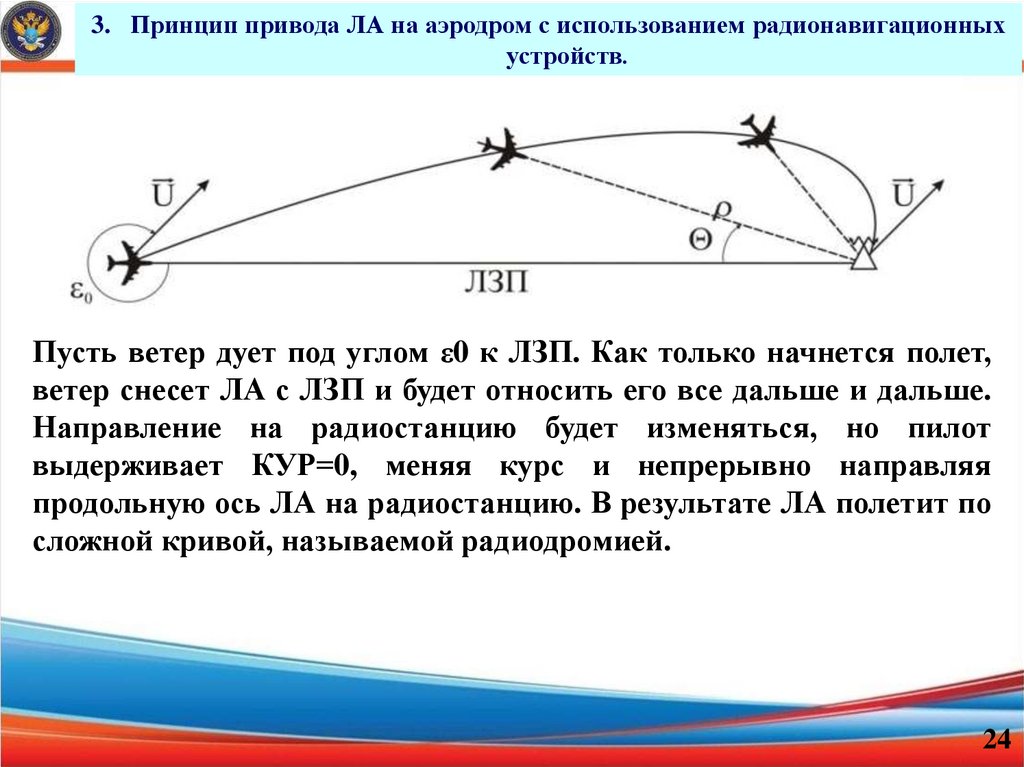
3. Принцип привода ЛА на аэродром с использованием радионавигационныхустройств.
Пусть ветер дует под углом ε0 к ЛЗП. Как только начнется полет,
ветер снесет ЛА с ЛЗП и будет относить его все дальше и дальше.
Направление на радиостанцию будет изменяться, но пилот
выдерживает КУР=0, меняя курс и непрерывно направляя
продольную ось ЛА на радиостанцию. В результате ЛА полетит по
сложной кривой, называемой радиодромией.
24
25.
3. Принцип привода ЛА на аэродром с использованием радионавигационныхустройств.
Курсовой способ является более удобной для пилота
модификацией пассивного способа. Он заключается в том, что ЛА
удерживается на КУР=0 не непрерывно, как при пассивном
способе, а устанавливается на этот КУР периодически, время от
времени. Довернув ЛА на КУР=0, пилот запоминает и
выдерживает по компасу получившийся при этом курс. По мере
полета с постоянным курсом КУР постепенно уходит от нулевого
значения и через некоторое время (обычно через каждые 3–5 минут
полета) пилот вновь доворачивает ЛА на КУР=0. На каждом
участке полета между доворотами ЛА летит с постоянным курсом,
то есть прямолинейно, поэтому ЛФП имеет вид ломаной линии.
Нетрудно сообразить, что она будет лежать дальше от ЛЗП, чем
радиодромия, то есть уклонение будет еще больше. Сохраняются и
другие недостатки пассивного способа. Такой способ просто более
удобен для пилота, поскольку выдерживать постоянным курс, а не
КУР гораздо легче. Можно даже использовать автопилот.
25
26.
3. Принцип привода ЛА на аэродром с использованием радионавигационныхустройств.
Активный полет на и от радиостанции заключается в
выдерживании курсового угла радиостанции с учетом угла сноса.
Чтобы ЛА не сносило ветром с ЛЗП, продольную ось нужно
отвернуть от ЛЗП в ту сторону, откуда дует ветер, на величину угла
сноса.
Если выполняется полет на радиостанцию, а снос
положительный (сносит вправо), то продольную ось нужно
отвернуть влево, то есть уменьшить курс.
Если сносит влево (УС отрицательный), то курс нужно
увеличить по сравнению с направлением на радиостанцию
(отвернуть продольную ось вправо). При этом КУР уменьшится по
сравнению с первоначальным нулевым значением.
26
27.
Общие сведения о воздушной навигацииЗаключение
Таким образом, на занятии рассмотрены способы определения
местоположения ЛА, классификация методов определения
навигационных параметров движения ЛА и радионавигационных
устройств и систем. Изучен принцип привода ЛА на аэродром с
использованием радионавигационных устройств.
Спасибо за внимание.
27