










 geography
geographySimilar presentations:






")

")

Основы радионавигации и средства радиотехнического обеспечения полетов авиации
1.
Кафедра ВКС ВУЦ при РТУ МИРЭАМодуль технической (специальной)
подготовки
Дисциплина «Техническая подготовка»
Раздел № 2. Основы радионавигации и средства
радиотехнического обеспечения полетов авиации
Руководитель занятия
полковник Белоус Сергей Ильич
1
2.
Основы радионавигации и средства радиотехнического обеспечения полетов авиацииТЕМА №3
Основные понятия радионавигации
Порядок изучения темы: Л1-2ч, ГЗ1-2ч
Занятие № 1 (лекция)
Общие сведения о воздушной навигации
УЧЕБНЫЕ ЦЕЛИ ЗАНЯТИЯ:
1. Рассмотреть основные понятия, задачи воздушной радионавигации.
2. Изучить основные навигационные параметры движения ЛА.
1.
2.
3.
УЧЕБНЫЕ ВОПРОСЫ:
Основные понятия радионавигации. Задачи воздушной радионавигации.
Навигационные системы координат.
Определение навигационных параметров движения ЛА.
2
3.
Общие сведения о воздушной навигацииВведение
Навигация - наука о методах и средствах вождения подвижного
объекта и получения информации о его положении и движении.
Первоначальный смысл латинского слова navigatio – плыву на судне
(другой вариант перевода - мореплавание).
Современное разнообразие транспортных средств не меняет сути
решаемой навигационной задачи: для любого движущегося объекта
необходимо определить такой путь движения, который бы обеспечивал
наилучшие показатели качества.
3
4.
1. Основные понятия радионавигации. Задачи воздушной радионавигации.Основными задачами экипажа ЛА при осуществлении
самолетовождения являются:
1. Точное выполнение полета по установленной трассе
(маршруту).
2. Определение навигационных элементов, необходимых
для выполнения полета по установленному маршруту или
поставленной специальной задачи (воздушная разведка,
бомбометание и др.).
3. Обеспечение прибытия ЛА к пункту назначения и
выполнение посадки на аэродроме в заданное время.
4. Обеспечение безопасности полета.
4
5.
1. Основные понятия радионавигации. Задачи воздушной радионавигации.По месту расположения технические средства делятся на
самолетные (бортовые) и наземные, а по характеру
использования — на автономные и неавтономные.
Автономными называются такие средства, применение
которых не требует специального наземного оборудования.
Неавтономными называются средства, которые выдают
информацию на основе их взаимодействия с наземными
устройствами.
5
6.
1. Основные понятия радионавигации. Задачи воздушной радионавигации.По
принципу
действия
технические
самолетовождения делятся на четыре группы:
средства
1. Геотехнические средства самолетовождения, основанные на
измерении
различных
параметров
естественных
(геофизических) полей Земли.
2. Радиотехнические средства самолетовождения, основанные на
измерении параметров электромагнитных полей, излучаемых
специальными устройствами, находящимися на борту самолета
или на земле.
3. Астрономические средства самолетовождения, основанные на
использовании небесных светил и искусственных спутников
Земли.
4. Светотехнические средства самолетовождения, основанные на
использовании бортовых или наземных источников света.
6
7.
1. Основные понятия радионавигации. Задачи воздушной радионавигации.Профиль
полета
В навигации траекторией
полета называется
пространственная кривая,
по которой перемещается
центр масс подвижного
объекта в процессе его
перемещения.
Вертикальная
плоскость
Траектория
полета
ЦМ ЛА
Маршрут
полета
МПЛА
Горизонтальная
плоскость
Точка земной поверхности, над которой находится подвижный
объект, называется местом ЛА или его местоположением (МПЛА)
7
8.
1. Основные понятия радионавигации. Задачи воздушной радионавигации.Этапы полета
8
9.
1. Основные понятия радионавигации. Задачи воздушной радионавигации.Основными задачами навигации являются:
1. Обеспечение точного перемещения подвижного объекта по
заданной траектории;
2. Точный вывод подвижного объекта в заданный пункт в
назначенное время наивыгоднейшим для данных условий
способом.
Для успешного выполнения этих задач необходимо ответить на
следующие вопросы:
1) где находится подвижный объект в данный момент;
2) куда необходимо перемещаться в дальнейшем;
3) каким способом следует перемещаться, чтобы прибыть в
заданные пункты (цель, аэродром посадки и т. д.) в назначенное
время с учетом нахождения поблизости других объектов и с
обеспечением требуемого уровня безопасности перемещения.
9
10.
2. Навигационные системы координат.Для определения местоположения ЛА достаточно представить
его некоторой материальной точкой. В этом случае в зависимости
от масштабов перемещений объектов можно использовать
местные и глобальные системы координат, не учитывающие
положение осей ЛА в пространстве.
Местные системы координат, начало которых связывается с
Землей, используются в качестве систем отсчета при сравнительно
небольших перемещениях, когда кривизной Земли можно
пренебречь и ее поверхность считается плоской.
Местные системы координат находят широкое применение,
например, при счислении пути на небольшие расстояния порядка
десятков и сотен километров, при управлении ЛА в период взлета
и посадки, при определении местоположения относительно
ориентиров, целей и промежуточных пунктов маршрута и т. п.
10
11.
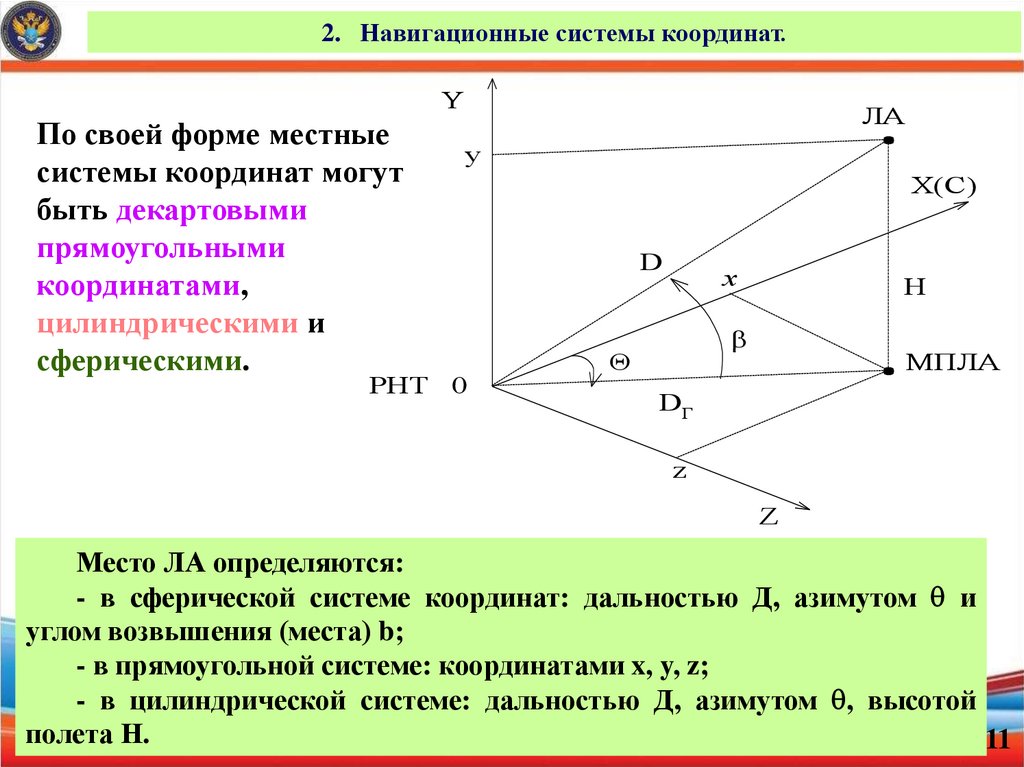
2. Навигационные системы координат.Y
По своей форме местные
системы координат могут
быть декартовыми
прямоугольными
координатами,
цилиндрическими и
сферическими.
ЛА
y
РНТ 0
X(С)
D
x
Н
МПЛА
DГ
z
Z
Место ЛА определяются:
- в сферической системе координат: дальностью Д, азимутом и
углом возвышения (места) b;
- в прямоугольной системе: координатами x, y, z;
- в цилиндрической системе: дальностью Д, азимутом , высотой
полета Н.
11
12.
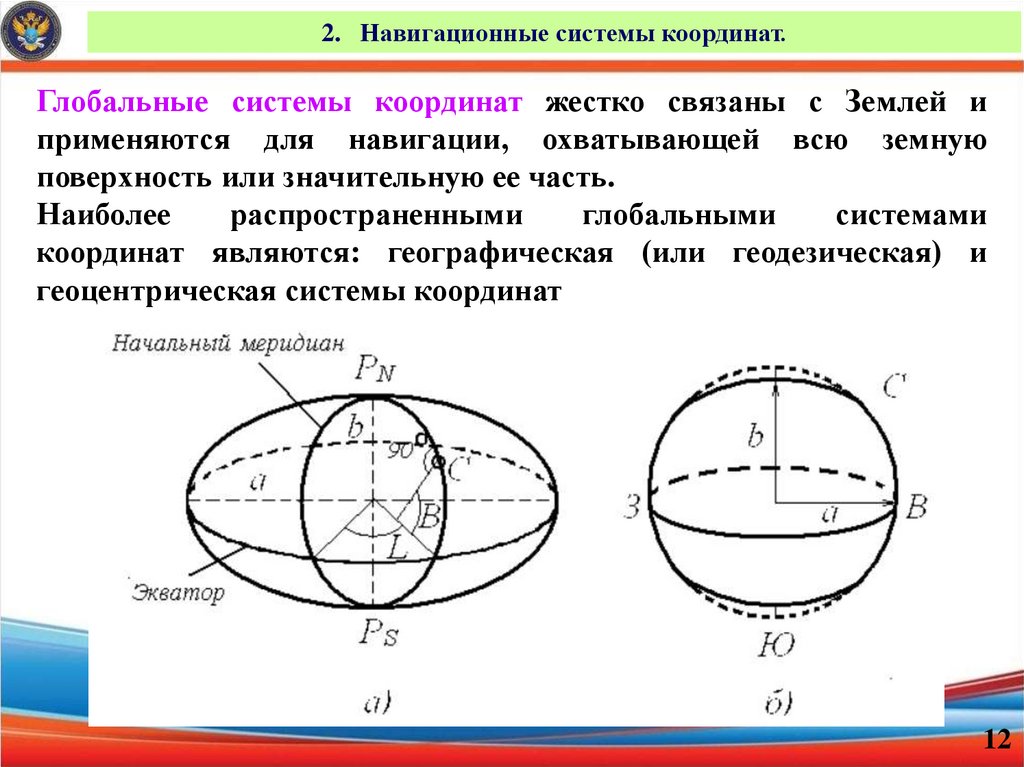
2. Навигационные системы координат.Глобальные системы координат жестко связаны с Землей и
применяются для навигации, охватывающей всю земную
поверхность или значительную ее часть.
Наиболее
распространенными
глобальными
системами
координат являются: географическая (или геодезическая) и
геоцентрическая системы координат
12
13.
3. Определение навигационных параметров движения ЛА.В зависимости от физической сущности навигационные
элементы (параметры) (НП) делятся на четыре группы.
К первой группе относятся НП, характеризующие положение и
перемещение центра масс ЛА в различных системах отсчета
(координаты ЛА, его линейная скорость и ускорение).
Ко второй группе относятся НП, определяющие перемещение
ЛА относительно его центра масс. Например, угловые координаты
объекта в горизонтальной системе координат (крен, тангаж, курс),
угловые координаты ЛА относительно вектора скорости (углы
атаки, скольжения, сноса и т.п.).
К третьей группе относятся НП, определяющие состояние
окружающей
среды.
Например,
параметры
атмосферы
(температура, давление, скорость ветра), параметры магнитного
поля Земли и т.п.
К четвертой группе относятся НП, характеризующие
положение и перемещение ЛА относительно других объектов
(ориентиров, приводных радиостанций, радиомаяков, других
воздушных и космических объектов и т.п.).
13
14.
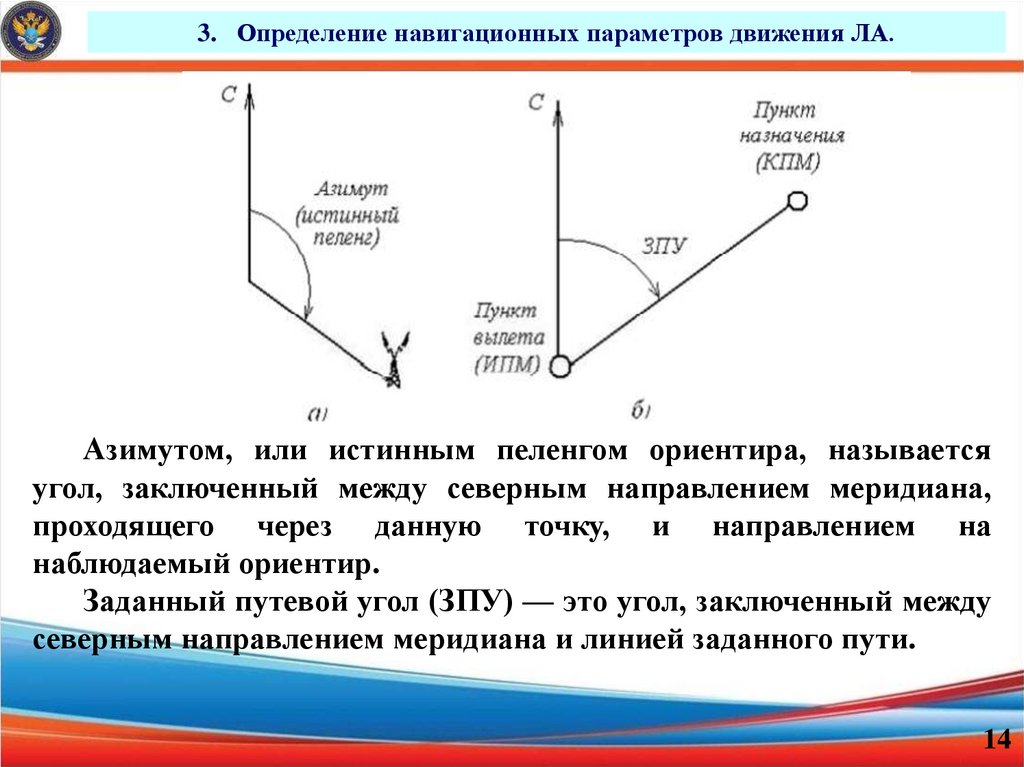
3. Определение навигационных параметров движения ЛА.Азимутом, или истинным пеленгом ориентира, называется
угол, заключенный между северным направлением меридиана,
проходящего через данную точку, и направлением на
наблюдаемый ориентир.
Заданный путевой угол (ЗПУ) — это угол, заключенный между
северным направлением меридиана и линией заданного пути.
14
15.
3. Определение навигационных параметров движения ЛА.Cu
M
CM
CK
K
ИК я
МК на
ь
КК ол
д
о
р
П
ь
с
о
А
Л
Х
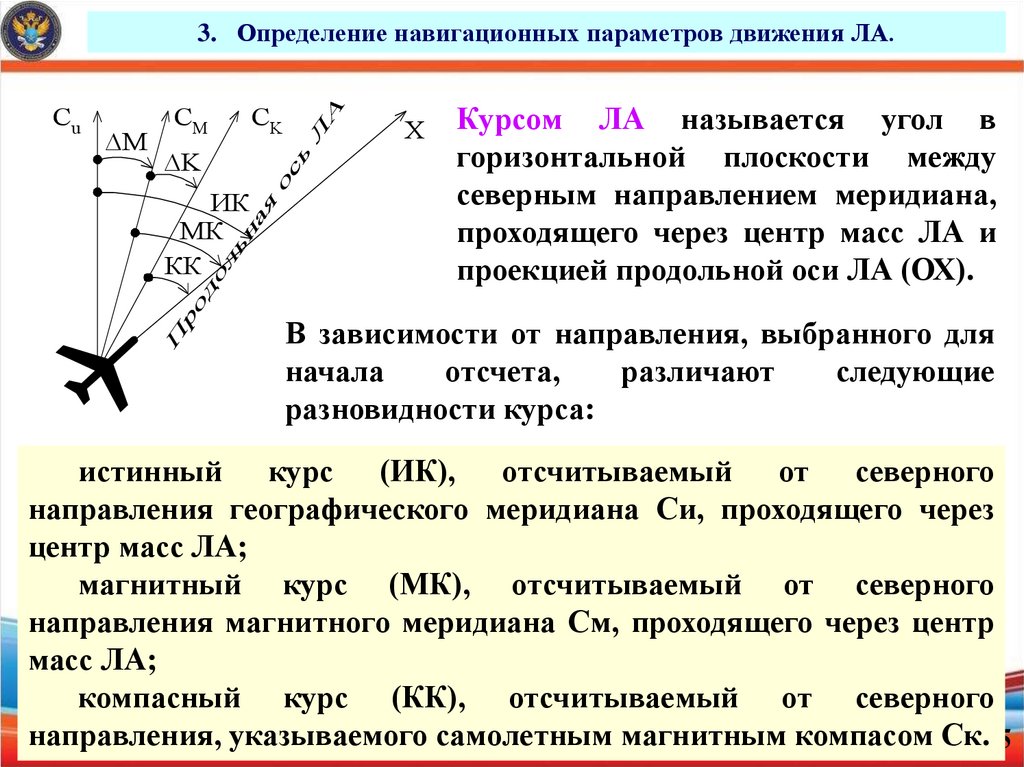
Курсом ЛА называется угол в
горизонтальной плоскости между
северным направлением меридиана,
проходящего через центр масс ЛА и
проекцией продольной оси ЛА (ОХ).
В зависимости от направления, выбранного для
начала
отсчета,
различают
следующие
разновидности курса:
истинный курс (ИК), отсчитываемый от северного
направления географического меридиана Си, проходящего через
центр масс ЛА;
магнитный курс (МК), отсчитываемый от северного
направления магнитного меридиана См, проходящего через центр
масс ЛА;
компасный курс (КК), отсчитываемый от северного
направления, указываемого самолетным магнитным компасом Ск.15
16.
3. Определение навигационных параметров движения ЛА.Cu
M
CM
CK
K
ИК я
МК на
ь
КК ол
д
о
р
П
ь
с
о
А
Л
Х
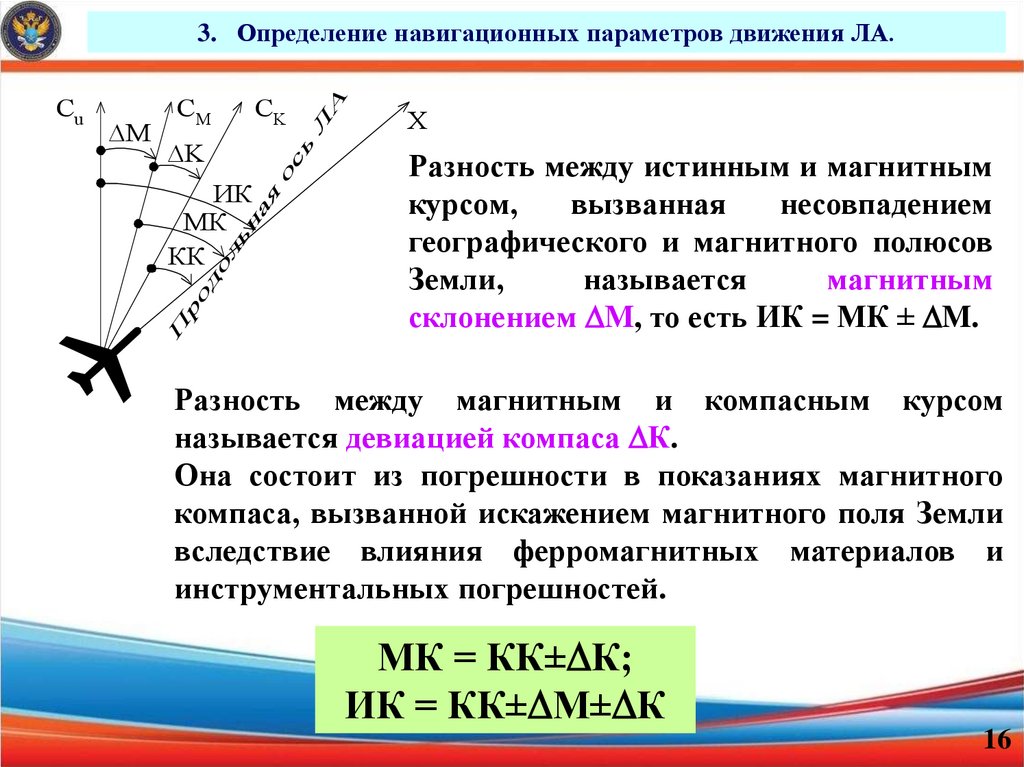
Разность между истинным и магнитным
курсом,
вызванная
несовпадением
географического и магнитного полюсов
Земли,
называется
магнитным
склонением M, то есть ИК = МК ± M.
Разность между магнитным и компасным курсом
называется девиацией компаса К.
Она состоит из погрешности в показаниях магнитного
компаса, вызванной искажением магнитного поля Земли
вследствие влияния ферромагнитных материалов и
инструментальных погрешностей.
МК = КК± К;
ИК = КК± М± К
16
17.
3. Определение навигационных параметров движения ЛА.Пункт с известными координатами, находящийся в приземном
или
космическом
пространстве,
в
котором
размещена
радиоаппаратура и относительно которого определяется положение
ЛА, называется радионавигационной точкой.
При определении направления на РНТ с помощью бортовых
радиопеленгаторов
(радиокомпасов)
используется
понятие
курсового угла радиоориентира – КУР.
КУР измеряют и отсчитывают от продольной оси ЛА по часовой
стрелке в пределах от 0 до 360°
17
18.
3. Определение навигационных параметров движения ЛА.ИПР = МПР ± M = МК ± M + КУР
= ИК + КУР
ИПС = ИПР 1800 ,
МПС = МПР 1800
Пеленгом или азимутом радиоориентира относительно ЛА называют
угол в горизонтальной плоскости между северным направлением
меридиана, проходящего через центр масс ЛА, и направлением на РНТ.
Различают истинный пеленг радиоориентира (ИПР), магнитный пеленг
радиоориентира (МПР) и КУР.
Пеленгом самолета (ПС) относительно радиоориентира называют угол в
горизонтальной плоскости между северным направлением меридиана,
проходящего через наземную РНТ, и направлением на самолет. Различают
истинный пеленг самолета (ИПС) и магнитный (МПС).
18
19.
3. Определение навигационных параметров движения ЛА.Значение поправки берется из таблиц для заданной разности
географических долгот места самолета и радиоориентира в
зависимости от типа картографической проекции или
непосредственно с карты (на полях карты изображена схема
магнитного склонения и схождения меридианов).
Знак " + " при 180° соответствует расположению ВС западнее РНТ,
а знак " - " − восточнее.
19
20.
3. Определение навигационных параметров движения ЛА.Море
2
О ТН
H
У
СЛ
H
Hu
О ТН
H
На
1
НУСЛ=const
Аэродром 1
Аэродром 2
Условный уровень
Абсолютная высота На - это высота, отсчитываемая от среднего уровня
Балтийского моря.
Истинная высота Ни - действительное расстояние от нижней точки ЛА до
ближайшей точки на земной поверхности.
Относительная высота Нотн измеряется барометрическим высотомером по
отношению к уровню аэродромов взлета и посадки.
Условную барометрическую высоту Нусл отсчитывают по показаниям от
условного уровня, соответствующего давлению 1013,2 гПа (760 мм рт. ст.),
на которой устанавливают нулевые шкалы высотомера.
20
21.
3. Определение навигационных параметров движения ЛА.Воздушной скоростью называется
относительно воздушной среды.
скорость
полета
ЛА
Скорость полета ЛА относительно земной системы координат
называется земной скоростью.
Составляющая вектора земной скорости в горизонтальной
плоскости - называется путевой скоростью ЛА.
Вертикальная составляющая вектора земной скорости – это
скорость подъема или спуска ЛА.
21
22.
Общие сведения о воздушной навигацииЗаключение
Таким образом, на лекции рассмотрены основные понятия
радионавигации, системы координат, методы определения основных
навигационных параметров движения ЛА.
Спасибо за внимание.
22