






















 industry
industrySimilar presentations:










Бортовые системы взвешивания и контроля перегруза для коммерческой техники
1.
Бортовые системы взвешиванияи контроля перегруза для
коммерческой техники
2.
Вид техники, тип подвескии задачи клиента
Наиболее нагруженная ось различных видов ТС
1. Что нужно клиенту: взвешивание, контроль перегруза и какую
проблему он собирается решить?
2. Сколько осей и виды подвески на них
3. Типы датчиков и места установки?
3.
Фургон. Пневмоподвеска.Контура ведущих осей
разделены по бортам.
Отдельный контур на
рулевую ось.
4.
Фургон. Пневмоподвеска.Раздельные контура на
ведущий мост
(лево,право), задний
ленивец, рулевую ось.
5.
Полуприцеп.Пневмоподвеска.
Общий контур на все
три оси.
6.
Полуприцеп.Пневмоподвеска.
Раздельные контура на
правый и левый борта.
7.
Полуприцеп.Пневмоподвеска.
Раздельные контура
первую ось и ленивец
8.
Параметры системы:Погрешность измерения веса – < 3%
Количество аналоговых датчиков давления
на 1 блок – 4
Количество датчиков на ТС –
соответствует количеству
пневмоконтуров на ТС
Напряжение питания системы – 12,24В
Интерфейсы – 1хCAN J1939, 1хRS-485
Тип датчика – цифровой или аналоговый
датчик давления
Применяемость
нагрузка на все оси
вес груза
вес автопоезда
3 датчика
нагрузка на заднюю ось
2 датчика
осевая нагрузка
вес груза
вес прицепа
осевая нагрузка
3 датчика
9.
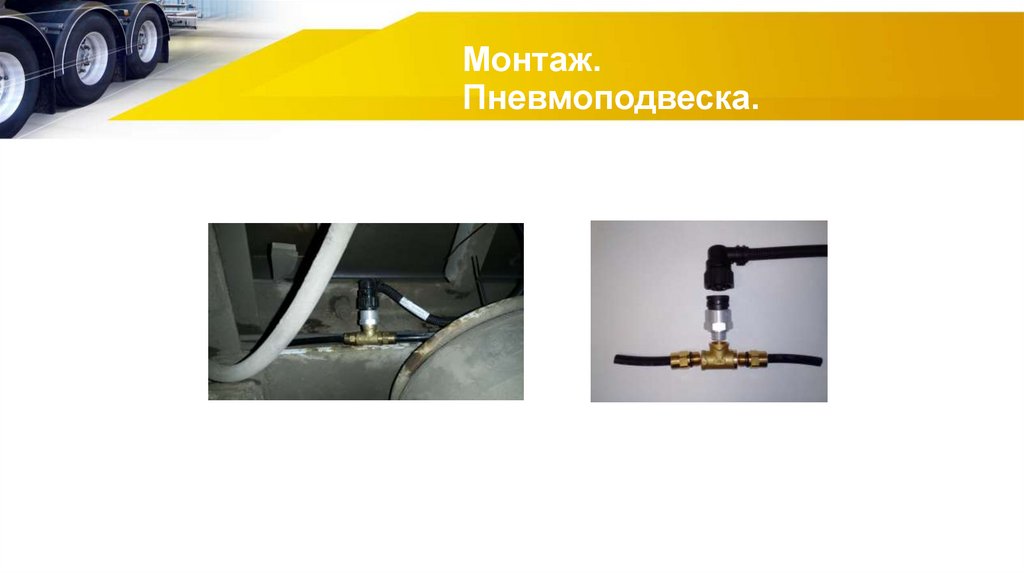
Монтаж.Пневмоподвеска.
10.
Рессорная подвеска.Варианты установки.
11.
Рессорная подвеска.Балансирная тележка.
12.
Монтаж.Рессорная подвеска.
Приварить шаблон к мосту
Удалить шаблон датчика
Установить датчик не затягивая болты
Зайти в меню «Таблица»
Подключить к контроллеру
Зайти в программу
Внимание! После установки датчиков деформации показания датчиков
должны быть окрашены в зеленый цвет
13.
Особенности монтажа.Рессорная подвеска.
Защита датчика на передней оси
Последствия «вредного» контакта
14.
Параметры системы:Погрешность измерения веса – до 3%
Количество аналоговых датчиков
деформации на 1 блок – 6
Напряжение питания системы – 12,24В
Интерфейсы – 1хCAN J1939, 1хRS-485
Тип датчика – цифровой или аналоговый
датчик деформации
Применяемость
вес груза
вес машины
нагрузка на 3 оси
3 датчика
нагрузка на все оси
вес груза
вес автопоезда
4 датчика
вес
урожая
4 датчика
вес
урожая
2 датчика
15.
Гидропневматическаяподвеска.
16.
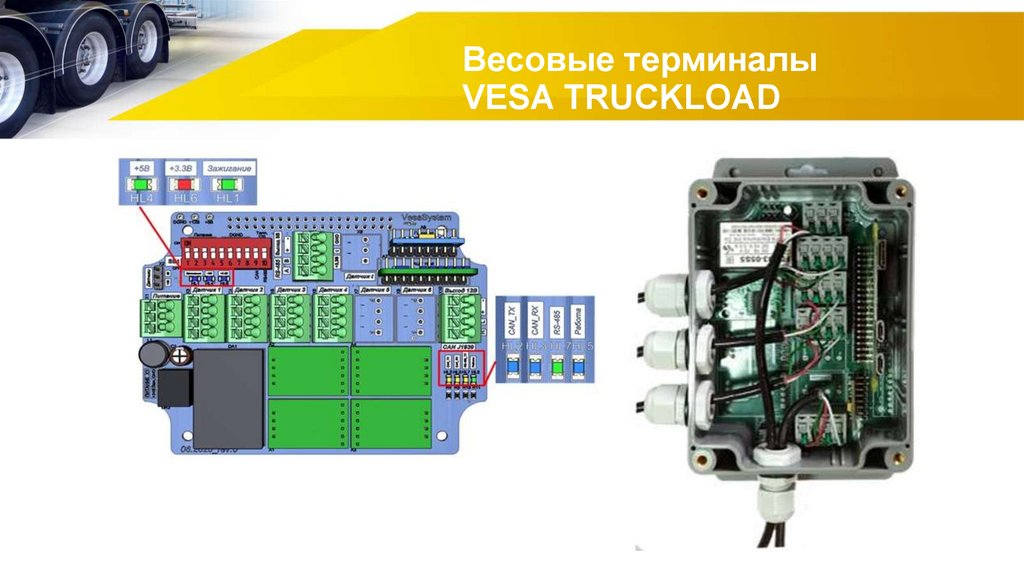
Весовые терминалыVESA TRUCKLOAD
Тип блока
Максимальное кол-во
датчиков
Пневматическая
подвеска
Рессорная
подвеска
Смешанная
подвеска
4 пневмо
6 тензо
вариант
2 тензо / 4 пневмо
Преимущества:
-CAN интерфейс (поддержка J1939)
-Интерфейс RS-485, протокол LLS
-Настройка и калибровка через веббраузер
-Наличие компактного выносного
дисплея
-Модульность (до 256 модулей)
-Установка на любой тип подвески
-Простая настройка программного
обеспечения под любой тип
подвески (Конфигуратор EasyTuner)
-Простой монтаж и подключение
17.
Весовые терминалыVESA TRUCKLOAD
18.
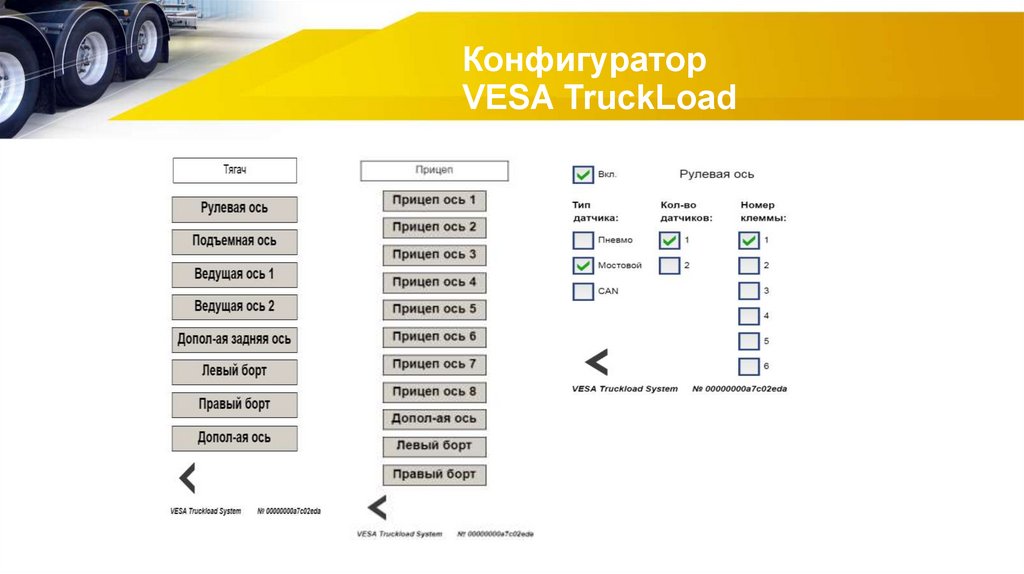
КонфигураторVESA TruckLoad
19.
Калибровка. Требования.Требования при проведении калибровки:
1. Калибровка проводится на ровной горизонтальной поверхности с
использованием сертифицированных поосных или платформенных
весов;
2. При калибровке стояночный и ручной тормоза должны быть
выключены;
3. Все элементы пневматической подвески должны быть исправны.
4. После установки датчиков деформации, т/с перед калибровкой должно
проехать не менее 1000км.
20.
Проведение калибровкиКалибровка следует проводить на поосных или платформенных весах.
Калибровка производится по двум точкам, на пустом и загруженном (не
менее 80% от максимального груза) транспортном средстве путем
измерения осевых нагрузок.
21.
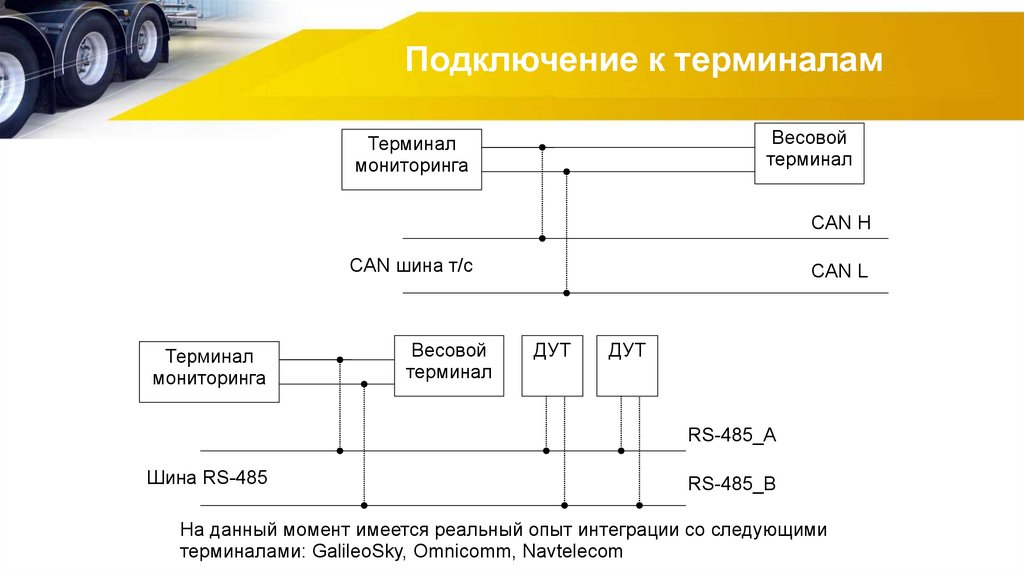
Подключение к терминаламВесовой
терминал
Терминал
мониторинга
CAN H
CAN шина т/с
Терминал
мониторинга
Весовой
терминал
CAN L
ДУТ
ДУТ
RS-485_A
Шина RS-485
RS-485_B
На данный момент имеется реальный опыт интеграции со следующими
терминалами: GalileoSky, Omnicomm, Navtelecom
22.
Основной экран системыVesa Truckload
23.
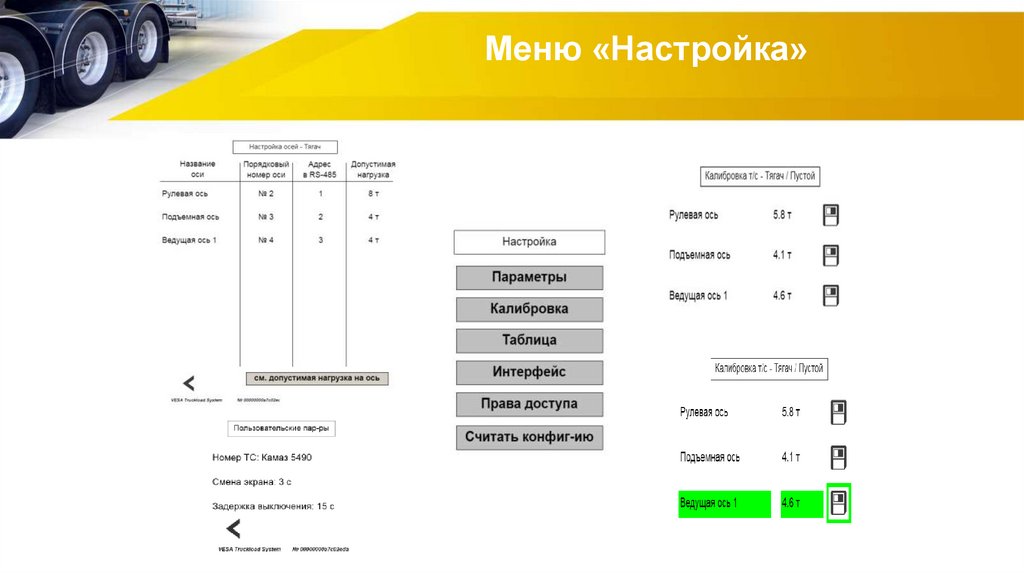
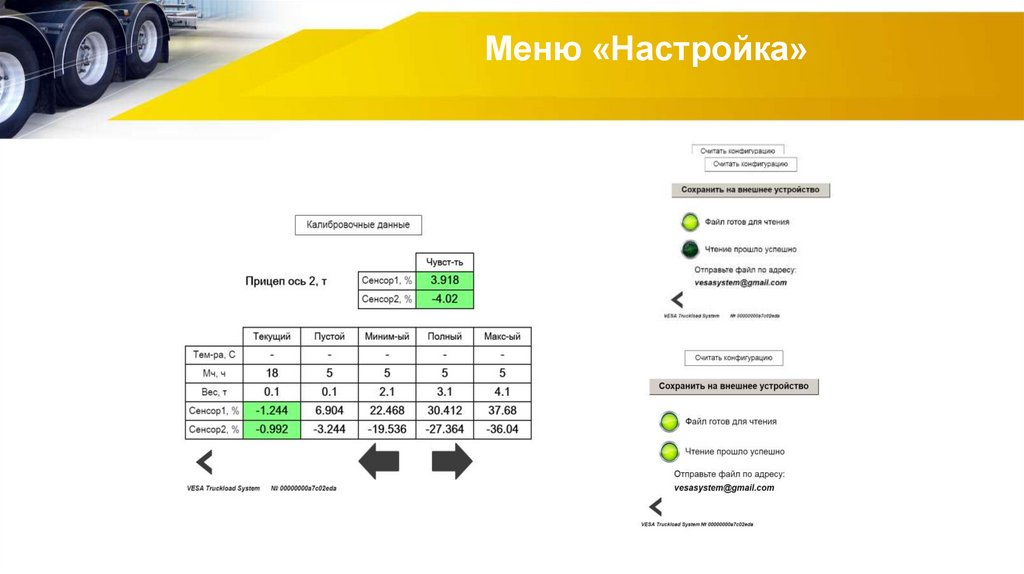
Меню «Настройка»24.
Меню «Настройка»25.
Монтаж системыVesaLoader.
Гидроцилиндры
подъема стрелы
26.
Монтаж системыVesaLoader.
27.
Монтаж системыVesaLoader.
28.
Основной экран системыVesaLoader. Параметры.
29.
Калибровка системыVesaLoader.
30.
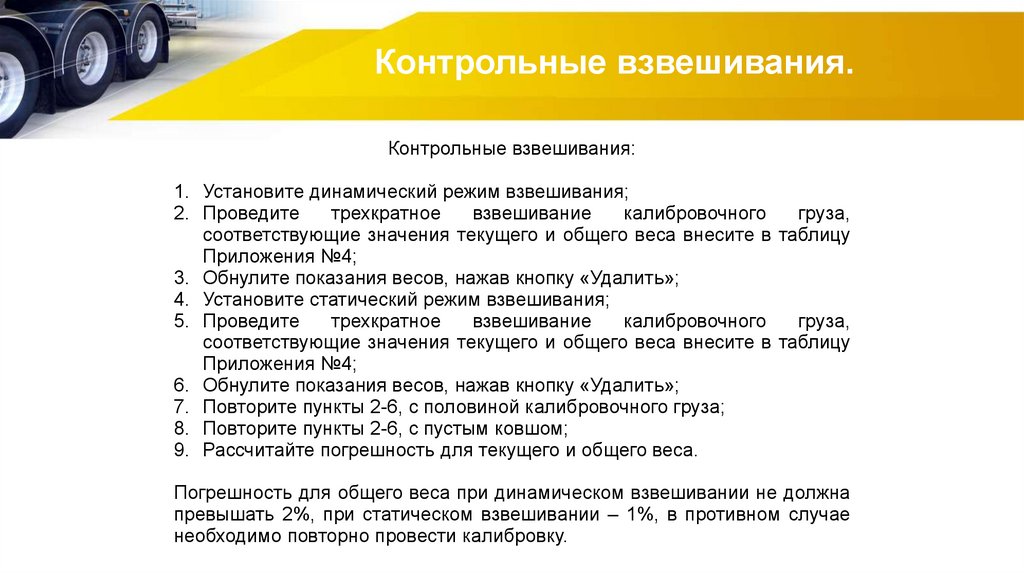
Контрольные взвешивания.Контрольные взвешивания:
1. Установите динамический режим взвешивания;
2. Проведите
трехкратное
взвешивание
калибровочного
груза,
соответствующие значения текущего и общего веса внесите в таблицу
Приложения №4;
3. Обнулите показания весов, нажав кнопку «Удалить»;
4. Установите статический режим взвешивания;
5. Проведите
трехкратное
взвешивание
калибровочного
груза,
соответствующие значения текущего и общего веса внесите в таблицу
Приложения №4;
6. Обнулите показания весов, нажав кнопку «Удалить»;
7. Повторите пункты 2-6, с половиной калибровочного груза;
8. Повторите пункты 2-6, с пустым ковшом;
9. Рассчитайте погрешность для текущего и общего веса.
Погрешность для общего веса при динамическом взвешивании не должна
превышать 2%, при статическом взвешивании – 1%, в противном случае
необходимо повторно провести калибровку.
31.
ООО «ВЕСА Систем»Юр. адрес: 423824, РФ, РТ, г. Набережные Челны,
ул. Машиностроительная д. 91А, этаж. 4, пом. 3, куб 8.2
Факт. адрес: 423800, РФ, РТ, г. Набережные Челны, ул.
Раскольникова, 29, офис 10
Директор – Галеев Руслан Ильгизович
Директор службы сервиса – Липатов Георгий Николаевич
Тел. +7 917 251 21 85, +7 995 095 80 12
lipatov.gn@vesasystem.ru
Vesasystem.ru