 programming
programming software
softwareSimilar presentations:










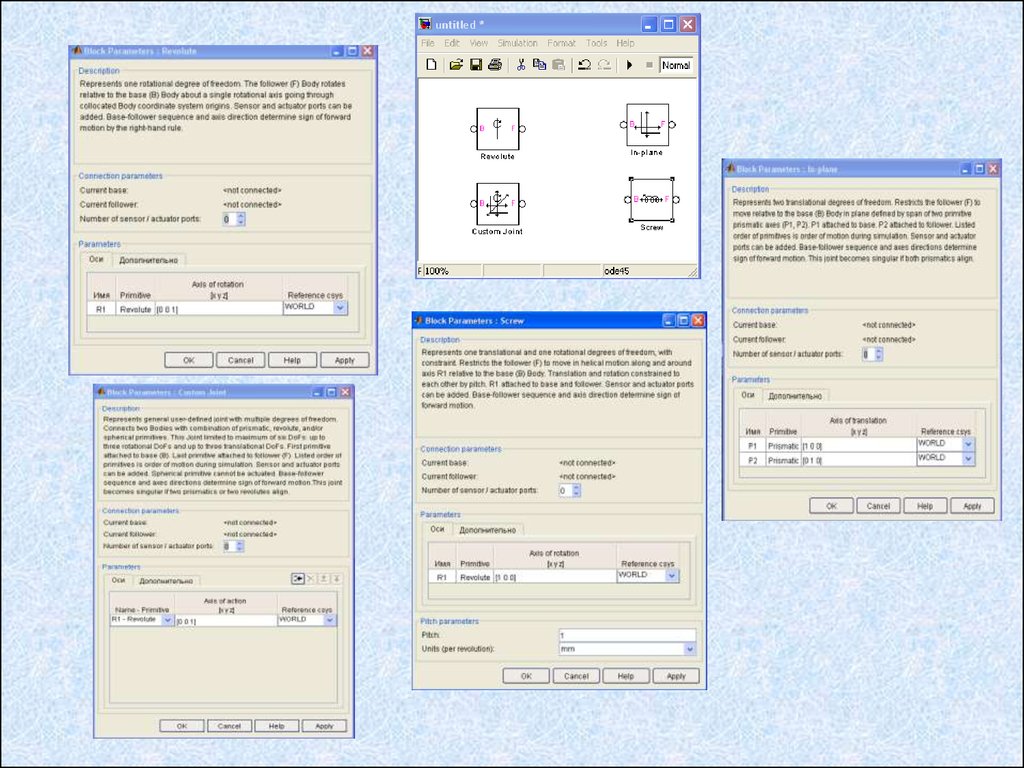
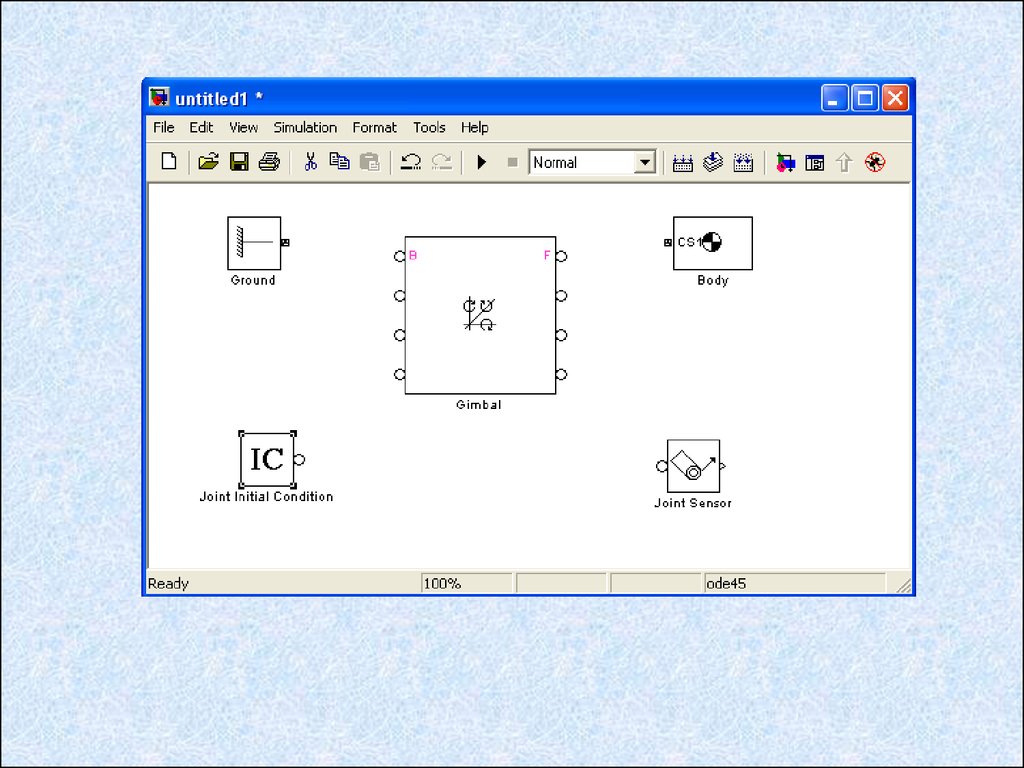
SimMechanics
1.
SimMechanicsSimMechanics предоставляет среду для трёхмерной
симуляции многотельных механических систем,
таких как:
•роботы;
•подвески транспортных средств;
•строительное оборудование;
•посадочные устройства самолетов.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
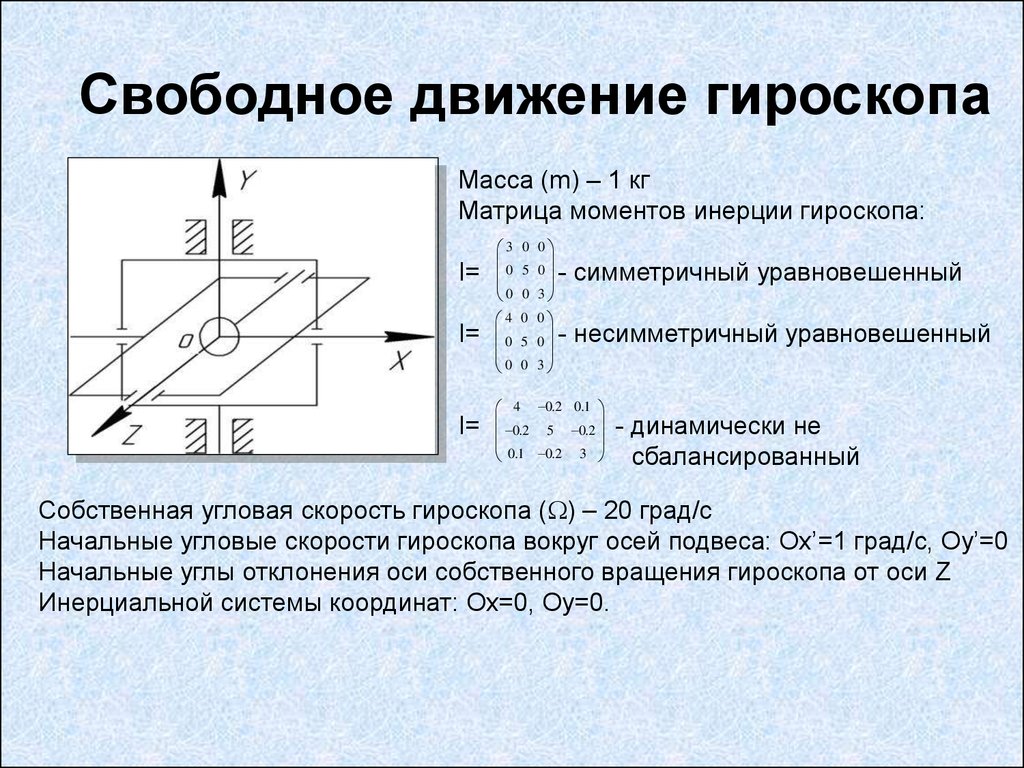
Свободное движение гироскопаМасса (m) – 1 кг
Матрица моментов инерции гироскопа:
I=
I=
I=
3
0
0
4
0
0
0 0
5 0
-
0 3
0 0
5 0
0 3
симметричный уравновешенный
- несимметричный уравновешенный
4 0.2 0.1
0.2 5 0.2
0.1 0.2 3
- динамически не
сбалансированный
Собственная угловая скорость гироскопа ( ) – 20 град/с
Начальные угловые скорости гироскопа вокруг осей подвеса: Ох’=1 град/с, Оy’=0
Начальные углы отклонения оси собственного вращения гироскопа от оси Z
Инерциальной системы координат: Ox=0, Oy=0.