









 mathematics
mathematicsПространственные векторы в асинхронном двигателе. Эйлер (1707-1783 гг)
1.
Эйлер (1707-1783 гг) – крупныйматематик, физик, механик, астроном
e
j t
cos t j sin t
2.
Пространственные векторы в асинхронном двигателеUm
Um
j t
j t
u
(
e
e
)
[cos t j sin t cos( t ) j sin( t )]
a
2
2
U m [cos t j sin t cos t j sin t ] U cos t ;
m
2
ub U m (e j ( t 120) e j ( t 120) ) U m [e j t e j120 e j t e j120 ]
2
2
U
m [(cos t j sin t ) (cos120 j sin120) (cos t j sin t ) (cos120 j sin120)]
2
Um
[cos t cos120 j cos t sin120 j sin t cos120 sin t sin120 cos t cos120
2
j cos t sin120 j sin t cos120 sin t sin120]
U m [2 cos t cos120 2 sin t sin120] U cos( t 120);
m
2
U
U
uc m (e j ( t 120) e j ( t 120) ) m [e j t e j120 e j t e j120 ]
2
2
U
m [(cos t j sin t ) (cos120 j sin120) (cos t j sin t ) (cos120 j sin120)]
2
Um
[cos t cos120 j cos t sin120 j sin t cos120 sin t sin120 cos t cos120
2
j cos t sin120 j sin t cos120 sin t sin120]
U
m [2 cos t cos120 2 sin t sin120] U m cos( t 120).
2
3.
(3)(4)
2 [u a u a u a ],
U
b 2
c 3
aS1 31 e j 0a; 1
Переход от
3
j120
0,5 j 0,866;
a2 1 e 0,5 j
2
3
j120
0,5 j
0,5 j 0,866.
a3 1 e
2
мгновенных значений напряжений к пространственному вектору U S
Итак, система уравнений в степенной форме имеет следующий вид:
Um
j t
j t
u
(
e
e
);
a
2
Um
u
(e j t e j120 e j t e j120 );
b
2
Um
j t
j120
j t
j120
u
(
e
e
e
e
).
c
2
a1 1 e j 0 ;
3
j120
0,5 j 0,866;
a2 1 e 0,5 j
2
3
j120
a
1
e
0,5
j
0,5 j 0,866.
3
2
(2)
(4)
4.
(3)(4)
2 [u a u a u a ],
U
b 2
c 3
aS1 31 e j 0a; 1
Переход от
3
j120
0,5 j 0,866;
a2 1 e 0,5 j
2
3
j120
0,5 j S 0,5 j 0,866. a
a3 1 e
2
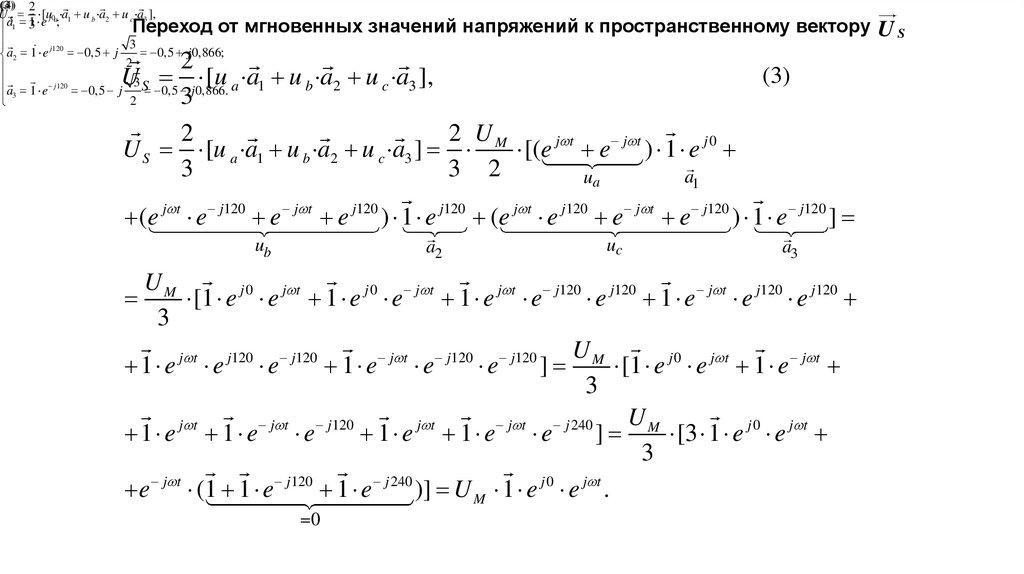
напряжений к пространственному вектору U S
Подставив вмгновенных
уравнениезначений
форме (2
(3) мгновенные значения напряжений в степенной
2
(3)
U [u пространственные
a1 u b a2 u c a3 ], векторы (4) получим:
единичные
3
2
2 UM
U S [u a a1 u b a2 u c a3 ]
[(e j t e j t ) 1 e j 0
3
3 2
a1
ua
(e j t e j120 e j t e j120 ) 1 e j120 (e j t e j120 e j t e j120 ) 1 e j120 ]
ub
a2
uc
a3
UM
[1 e j 0 e j t 1 e j 0 e j t 1 e j t e j120 e j120 1 e j t e j120 e j120
3
UM
j t
j120
j120
j t
j120
j120
1 e e e
1 e e
e
]
[1 e j 0 e j t 1 e j t
3
UM
j t
j t
j120
j t
j t
j 240
1 e 1 e e
1 e 1 e e
]
[3 1 e j 0 e j t
3
e j t (1 1 e j120 1 e j 240 )] U M 1 e j 0 e j t .
0
5.
US2
[u a a1 u b a2 u c a3 ],
3
(3)
Пространственная
Временная система
координат
+1
A
→
→
→
[ua·a1+ub·a2+uc·a3]
+1
→
uc·a
3
→
→
→
Us= 2 [ua·a→1+ub·a2+uc·a3]
3
+j
→
ub·a
2
UA
→
ua·a
1
→
uc·a3
→
ua=1
+j
ub·a2
uc
B
ω
ω
UC
ub
uc
ub
UB
C
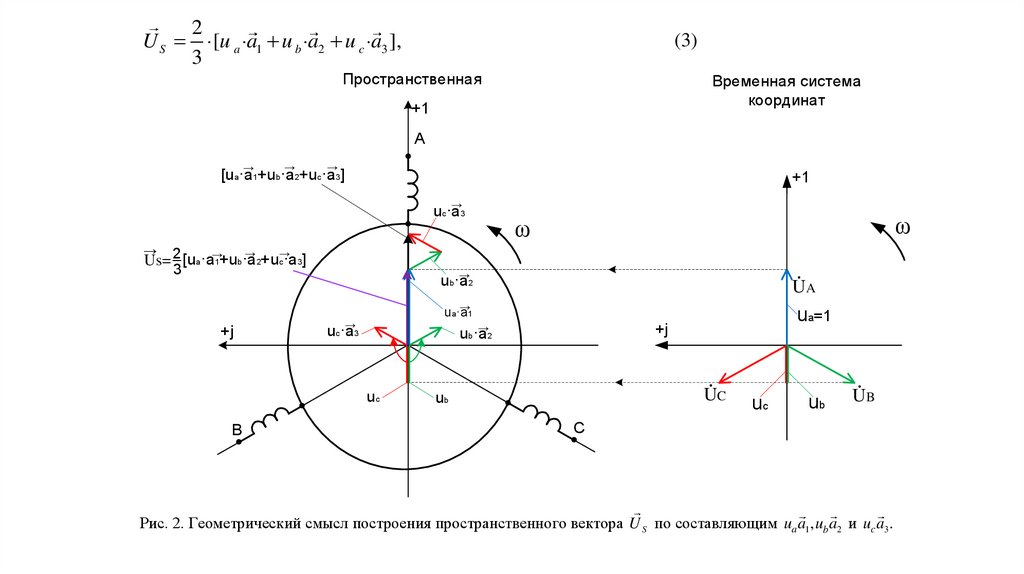
Рис. 2. Геометрический смысл построения пространственного вектора U S по составляющим ua a1 , ub a2 и uc a3 .
6.
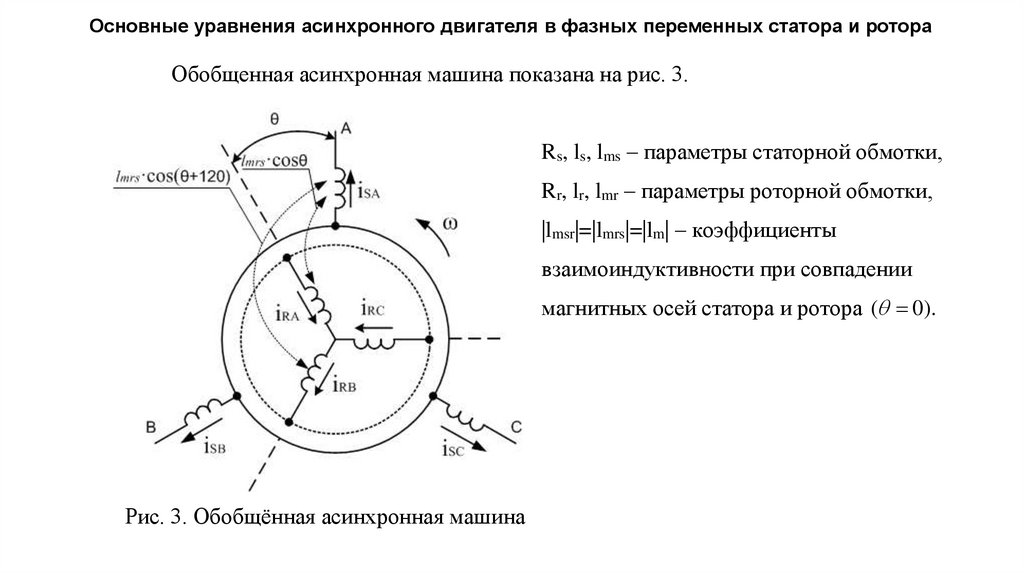
Основные уравнения асинхронного двигателя в фазных переменных статора и ротораОбобщенная асинхронная машина показана на рис. 3.
Rs, ls, lms – параметры статорной обмотки,
Rr, lr, lmr – параметры роторной обмотки,
|lmsr|=|lmrs|=|lm| – коэффициенты
взаимоиндуктивности при совпадении
магнитных осей статора и ротора ( 0).
Рис. 3. Обобщённая асинхронная машина
7.
Преобразование балансов напряжений в фазных переменных в соответствующийбаланс пространственных векторов
d sa
usa isa Rs dt ;
d sb
;
usb isb Rs
dt
d sc
usc isc Rs dt ;
(5)
2
2
d 2
[u sa a1 u sb a2 u sc a3 ] [i sa a1 i sb a2 i sc a3 ] RS [ ( sa a1 sb a2 sc a3 )].
3
3
dt 3
US
S
IS
(6)
U S I S RS
(7)
d S
dt
(17)
2 3 ;
2 3 ;
2 3 .
d ra
u
i
R
| a1
ra ra r
dt
d
urb irb Rr rb | a 2
dt
d rc
u
i
R
| a3
rc rc r
dt
2
2
d 2
[u ra a1 u rb a2 u rc a3 ] [i ra a1 i rb a2 i rc a3 ] RS [ ( ra a1 rb a2 rc a3 )].
3
3
dt 3
Ur
r
Ir
U R I R Rr
d r
dt
(18)
8.
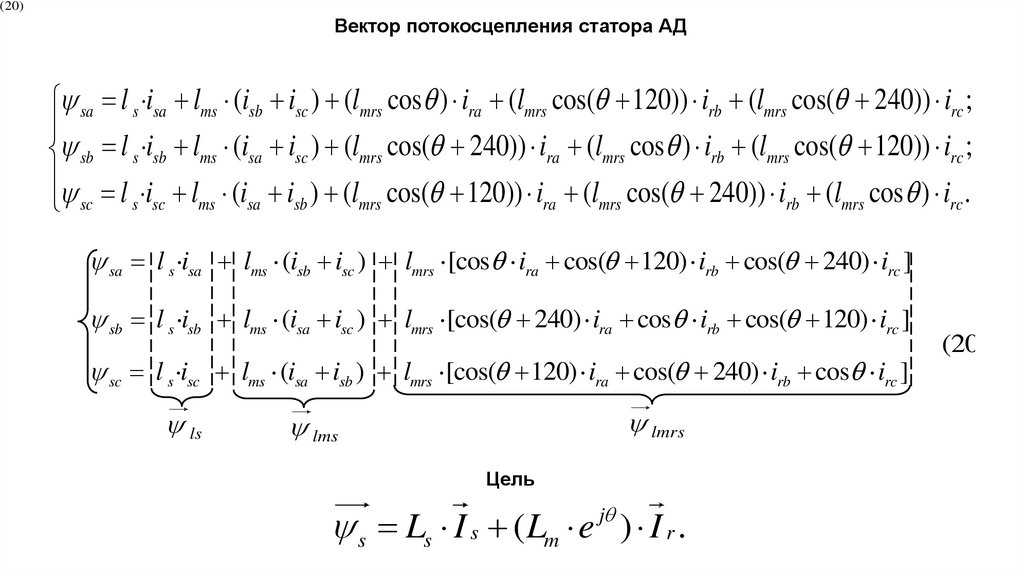
(20)Вектор потокосцепления статора АД
sa l s isa lms (isb isc ) (lmrs cos ) ira (lmrs cos( 120)) irb (lmrs cos( 240)) irc ;
sb l s isb lms (isa isc ) (lmrs cos( 240)) ira (lmrs cos ) irb (lmrs cos( 120)) irc ;
l i l (i i ) (l cos( 120)) i (l cos( 240)) i (l cos ) i .
mrs
ra
mrs
rb
mrs
rc
sc s sc ms sa sb
sa l s isa lms (isb isc ) lmrs [cos ira cos( 120) irb cos( 240) irc ]
sb l s isb lms (isa isc ) lmrs [cos( 240) ira cos irb cos( 120) irc ]
sc l s isc lms (isa isb ) lmrs [cos( 120) ira cos( 240) irb cos irc ]
ls
lmrs
lms
Цель
s Ls I s ( Lm e j ) I r .
(20)
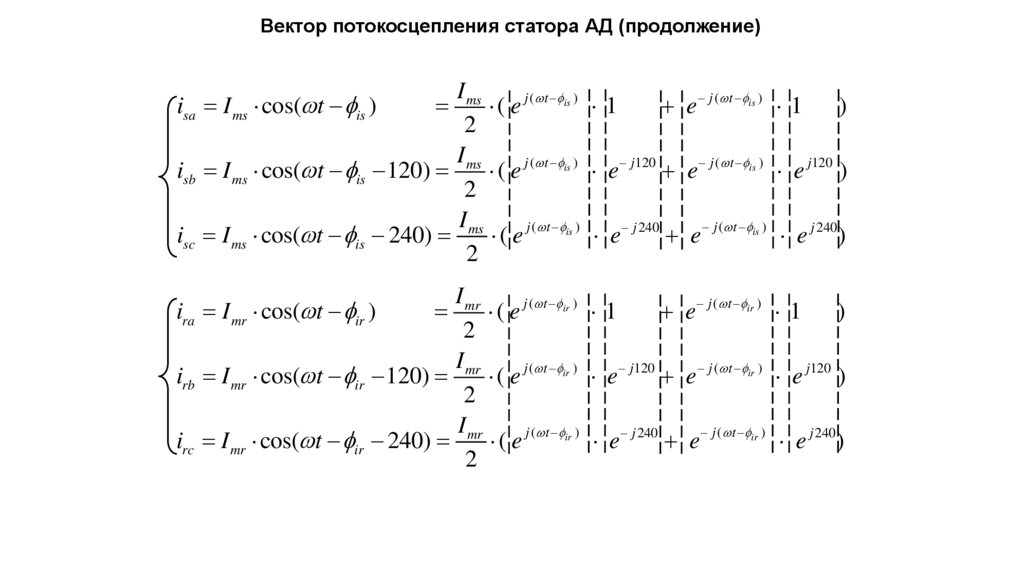
9.
Вектор потокосцепления статора АД (продолжение)I ms
( e j ( t is ) 1
e j ( t is ) 1
)
2
I ms
isb I ms cos( t is 120)
( e j ( t is ) e j120 e j ( t is ) e j120 )
2
I ms
isc I ms cos( t is 240)
( e j ( t is ) e j 240 e j ( t is ) e j 240)
2
isa I ms cos( t is )
I mr
( e j ( t ir ) 1
e j ( t ir ) 1
)
2
I mr
irb I mr cos( t ir 120)
( e j ( t ir ) e j120 e j ( t ir ) e j120 )
2
I mr
irc I mr cos( t ir 240)
( e j ( t ir ) e j 240 e j ( t ir ) e j 240 )
2
ira I mr cos( t ir )
10.
1j
j
)
e
e
(
cos
2
1
1
j ( 120)
j ( 120)
( e j e j120 e j e j120 )
)
e
e
(
)
120
cos(
2
2
1
1
j 240
j
j 240
j
j ( 240)
j ( 240)
)
e
e
e
e
(
)
e
e
(
240)
cos(
2
2
1 j
1
1
e
e j 1
2
2
1 j
1
j120
j
e j120
e
e e
2
2
1
1
e j e j 240 e j e j 240
2
2
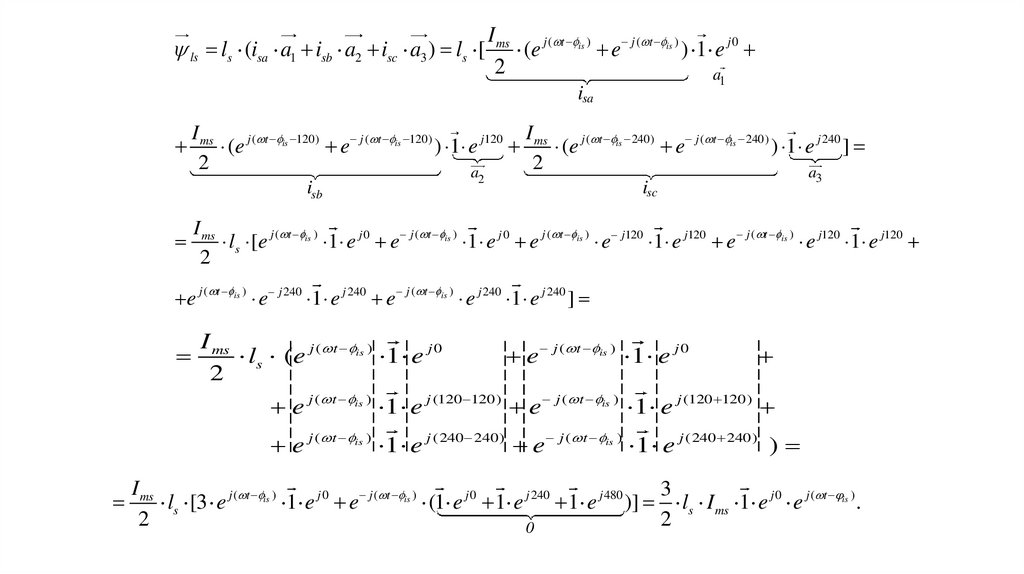
11.
ls ls (isa a1 isb a2 isc a3 ) ls [I ms
(e j ( t is ) e j ( t is ) ) 1 e j 0
2
a
1
isa
I ms
I ms
j ( t is 120)
j ( t is 120)
j120
(e
e
) 1 e
(e j ( t is 240) e j ( t is 240) ) 1 e j 240 ]
2
2
a
a
isb
2
isc
3
I ms
ls [e j ( t is ) 1 e j 0 e j ( t is ) 1 e j 0 e j ( t is ) e j120 1 e j120 e j ( t is ) e j120 1 e j120
2
e j ( t is ) e j 240 1 e j 240 e j ( t is ) e j 240 1 e j 240 ]
I ms
ls (e j ( t is ) 1 e j 0
e j ( t is ) 1 e j 0
2
e j ( t is ) 1 e j (120 120) e j ( t is ) 1 e j (120 120)
e j ( t is ) 1 e j (240 240) e j ( t is ) 1 e j (240 240) )
I ms
3
ls [3 e j ( t is ) 1 e j 0 e j ( t is ) (1 e j 0 1 e j 240 1 e j 480 )] ls I ms 1 e j 0 e j ( t is ) .
2
2
0
12.
Для второго столбца:lms lms [(isb isc ) a1 (isa isc ) a2 (isa isb ) a3 ] lms (isa a1 isb a2 isc a3 )
isa
isb
isc
3
lms I ms 1 e j 0 e j ( t is ) .
2
Наконец, для третьего столбца:
lmrs (t ) l mrs [ A s B s C s ] ,
где
As 1 e j 0 [ira cos irb cos( 120) irc cos( 240)];
Bs 1 e j120 [ira cos( 240) irb cos irc cos( 120)];
C s 1 e j 240 [ira cos( 120) irb cos( 240) irc cos ].
13.
As 1 e j 0 (ira cos irb cos( 120) irc cos( 240))I mr
I mr
1 j
j ( t ir )
j ( t ir )
j
1 e [ (e
e
) (e e )
(e j ( t ir 120) e j ( t ir 120) )
2
2
2
j0
cosθ
ira
irb
I
I
1
1
(e j ( 120) e j ( 120) ) mr (e j ( t ir 240) e j ( t ir 240) ) (e j ( 240) e j ( 240) )] mr 1 e j 0
2
2
2
4
cos(θ+120)
[ e j ( t ir ) 1
cos(θ+240)
irc
e j ( t ir ) 1
e j ( t ir ) 1
e j ( t ir ) 1
e j ( t ir ) e j ( 120 120) e j ( t ir ) e j ( 120 120) e j ( t ir ) e j (120 120) e j ( t ir ) e j (120 120)
e j ( t ir ) e j ( 240 240) e j ( t ir ) e j ( 240 240) e j ( t ir ) e j (240 240) e j ( t ir ) e j (240 240) ]
I mr
1 e j 0 [3 e j ( t ir ) e j ( t ir ) (1 e j 240 e j 480 ) e j ( t ir ) (1 e j 240 e j 480 )
4
3
3
j ( t ir )
j ir
j0
j
j t
3 e
] ( I mr 1 e e
e ) e ( I mr 1 e j 0 e j ir e j ) e j t ,
4
4
где
(1 e j 240 e j 480 ) (1 e j120 e j 240 ) 0.
14.
B s 1 e j120 (ira cos( 240) irb cos irc cos( 120))1 e
j120
I mr
1 j ( 240) j ( 240) I mr
j ( t ir )
j ( t ir )
[ (e
e
) (e
e
)
(e j ( t ir 120) e j ( t ir 120) )
2
2
2
cos(θ+240)
ira
irb
I
I
1
1
(e j e j ) mr (e j ( t ir 240) e j ( t ir 240) ) (e j ( 120) e j ( 120) )] mr 1 e j120
2
2
2
4
cosθ
irc
cos(θ+120)
[e j ( t ir ) e j 240
e j ( t ir ) e j 240
e j ( t ir ) e j 240
e j ( t ir ) e j 240
e j ( t ir ) e j120
e j ( t ir ) e j120
e j ( t ir ) e j120
e j ( t ir ) e j120
e j ( t ir ) e j ( 240 120) e j ( t ir ) e j ( 240 120) e j ( t ir ) e j (240 120) e j ( t ir ) e j (240 120) ]
I mr
1 e j120 [e j ( t ir ) (e j 240 e j120 e j120 ) e j ( t ir ) (e j 240 e j120 e j 360 )
4
e j ( t ir ) (e j 240 e j120 e j 360 ) e j ( t ir ) (e j 240 e j120 e j120 )]
3
3
( I mr 1 e j 0 e j ir e j ) e j t ( I mr 1 e j 240 e j ir e j ) e j t .
4
4
15.
C s 1 e j 240 (ira cos( 120) irb cos( 240) irc cos ))1 e
j 240
I mr
1 j ( 120) j ( 120) I mr
j ( t ir )
j ( t ir )
[
(e
e
) (e
e
)
(e j ( t ir 120) e j ( t ir 120) )
2
2
2
cos(θ+120)
ira
irb
I mr
1 j ( 240) j ( 240) I mr
1 j
j ( t ir 240)
j ( t ir 240)
j
(e
e
)
(e
e
) (e e )]
1 e j 240
2
2
2
4
cos(θ+240)
[e j ( t ir ) e j120
irc
e j ( t ir ) e j120
cosθ
e j ( t ir ) e j120
e j ( t ir ) e j120
e j ( t ir ) e j ( 120 240) e j ( t ir ) e j ( 120 240) e j ( t ir ) e j ( 120 240) e j ( t ir ) e j ( 120 240)
e j ( t ir ) e j 240
e j ( t ir ) e j 240
e j ( t ir ) e j 240
e j ( t ir ) e j 240
I mr
1 e j120 [e j ( t ir ) (e j120 e j120 e j 240 ) e j ( t ir ) (e j120 e j 360 e j 240 )
4
e j ( t ir ) (e j120 e j 360 e j 240 ) e j ( t ir ) (e j120 e j 360 e j 120 )]
3
3
j ir
j 360
j
j t
( I mr 1 e e
e ) e ( I mr 1 e j120 e j ir e j ) e j t .
4
4
]
16.
33
As B s C s [( I mr 1 e j 0 e j ir e j ) e j t ( I mr 1 e j 0 e j ir e j ) e j t ]
4
4
3
3
j ir
j0
j
j t
[( I mr 1 e e
e ) e ( I mr 1 e j120 e j ir e j ) e j t ]
4
4
3
3
j ir
j0
j
j t
[( I mr 1 e e
e ) e ( I mr 1 e j 240 e j ir e j ) e j t ]
4
4
9
3
j ir
j0
j
j t
( I mr 1 e e
e ) e I mr 1 e j ir e j (e j 0 e j 240 e j120 ) e j t
4
4
9
( I mr 1 e j 0 e j ir e j ) e j t .
4
17.
lmrs9
lmrs [ As B s C s ] ( I mr 1 e j 0 e j ir e j ) e j t .
4
2
2
s (a1 sa a2 sb a3 sc ) ( ls (t ) lms (t ) lmrs (t ))
3
3
2 3
3
9
j is
j is
j t
j t
[( I ms ls 1 e ) e ( I ms lms 1 e ) e ( I mr lmrs 1 e j ir e j )
3 2
2
4
3
j is
j t
e ] [(ls lms ) I ms 1 e
lmrs I mr 1 e j ir e j ] e j t .
2
3
lmrs Lm ; I s I ms 1 e j ( t is ) ; I r I mr 1 e j ( t ir ) .
Обозначим ls lms Ls ;
2
Окончательно, вектор потокосцепления статора [1]:
s Ls I s ( Lm e j ) I r .
(21)
18.
Вектор потокосцепления ротора АДra l r ira lmr (isb isc ) (lmsr cos( )) isa (lmsr cos(120 )) isb (lmsr cos(240 )) isc ;
rb l r irb lmr (isa isc ) (lmsr cos(240 )) isa (lmsr cos( )) isb (lmsr cos(120 )) isc ;
l i l (i i ) (l cos(120 )) i (l cos(240 )) i (l cos( )) i .
msr
sa
msr
sb
msr
sc
rc r rc mr sa sb
ra l r ira lmr (isb isc ) lmsr [cos( ) isa cos( 120) isb cos( 240) isc ]
rb l r irb lmr (isa isc ) lmsr [cos( 240) isa cos( ) isb cos( 120) isc ]
rc l r irc lmr (isa isb ) lmsr [cos( 120) isa cos( 240) isb cos( ) isc ]
lr
lmsr
lmr
Цель
r Lr I r (Lm e j ) I s
(23)
19.
Пространственный вектор для первого столбца lr :I mr
lr lr (ira a1 irb a2 irc a3 ) lr [ (e j ( t ir ) e j ( t ir ) ) 1 e j 0
2
a1
isa
I mr
I mr
j ( t ir 120)
j ( t is 120)
j120
(e
e
) 1 e
(e j ( t ir 240) e j ( t is 240) ) 1 e j 240 ]
2
2
a
a
isb
2
isc
I mr
lr (e j ( t ir ) 1 e j 0
e j ( t ir ) 1 e j 0
2
e j ( t ir ) 1 e j (120 120) e j ( t ir ) 1 e j (120 120)
e j ( t ir ) 1 e j (240 240) e j ( t ir ) 1 e j (240 240) )
I mr
lr [e j ( t is ) (1 e j 0 1 e j 0 1 e j 0 ) e j ( t is ) (1 e j 0 1 e j 240 1 e j120 )]
2
0
3
lr I mr 1 e j 0 e j ( t ir ) .
2
3
20.
Пространственный вектор для второго столбца системы уравнений (23):lmr lmr [a1 (irb irc ) a2 (ira irc ) a3 (ira irb )] lmr (a1 ira a2 irb a3 irc )
3
lmr I mr 1 e j 0 e j ( t ir ) .
2
Пространственный вектор для третьего столбца (23):
lmsr lmsr [ Ar B r C r ] ,
где
Ar 1 e j 0 (isa cos isb cos( 120) isc cos( 240));
B r 1 e j120 (isa cos( 240) isb cos isc cos( 120));
C r 1 e j 240 (isa cos( 120) isb cos( 240) isc cos ).
21.
Ar 1 e j 0 (isa cos isb cos( 120) isc cos( 240))I ms j ( wt is ) j ( wt is ) 1 j j
I ms j ( wt is 120) j ( wt is 120)
1 e ( e
e
) (e e )
(e
e
)
2
2
2
j0
cos
isa
isb
I ms
1 j ( 120) j ( 120) I ms j ( wt is 240) j ( wt is 240) 1 j ( 240) j ( 240)
(e
e
)
(e
e
) (e
e
)
1 e j 0
2
2
2
4
cos( 120)
[ e j ( wt is ) 1
cos( 120)
isc
e j ( wt is ) 1
e j ( wt is ) 1
e j ( wt is ) 1
e j ( wt is ) e j (120 120) e j ( wt is ) e j (120 120) e j ( wt is ) e j (120 120) e j ( wt is ) e j (120 120)
e j ( wt is ) e j (240 240) e j ( wt is ) e j (240 240) e j ( wt is ) e j (240 240) e j ( wt is ) e j (240 240) ]
I ms
1 e j 0 [e j ( wt is ) (1 e j 240 e j 480 ) 3 e j ( wt is ) 3 e j ( wt is )
4
3
3
j ( wt is )
j is
j 240
j 480
j0
j
j t
e
(1 e
e )] ( I ms 1 e e
e ) e ( I ms 1 e j 0 e j is e j ) e j t .
4
4
22.
Br 1 e j120 (isa cos( 240) isb cos isc cos( 120))1 e
j120
I ms j ( wt is ) j ( wt is ) 1 j ( 240) j ( 240) I ms j ( wt is 120) j ( wt is 120)
( e
e
) (e
e
)
(e
e
)
2
2
2
isa
cos(θ-240)
isb
I ms j ( wt is 240) j ( wt is 240) 1 j ( 120) j ( 120)
I ms
1 j j
(e e )
(e
e
) (e
e
)
1 e j120
2
2
2
4
cosθ
isc
cos(θ-120)
[e j ( wt is ) e j 240
e j ( wt is ) e j 240
e j ( wt is ) e j 240
e j ( wt is ) e j 240
e j ( wt is ) e j120
e j ( wt is ) e j120
e j ( wt is ) e j120
e j ( wt is ) e j120
e j ( wt is ) e j (240 120) e j ( wt is ) e j (240 120) e j ( wt is ) e j (240 120) e j ( wt is ) e j (240 120) ]
I ms
1 e j120 [e j ( wt is ) (e j 240 e j120 e j 360 ) 3 e j ( wt is ) e j120 3 e j ( wt is ) e j120
4
3
3
j ( wt is )
j is
j 240
j120
j 360
j0
j
j t
e
(e
e e )] ( I ms 1 e e
e ) e ( I ms 1 e j 240 e j is e j ) e j t .
4
4
23.
C r 1 e j 240 (isa cos( 120) isb cos( 240) isc cos ))1 e
j 240
I ms j ( wt is ) j ( wt is ) 1 j ( 120) j ( 120) I ms j ( wt is 120) j ( wt is 120)
( e
e
) (e
e
)
(e
e
)
2
2
2
cos(θ-120)
isa
isb
I ms
1 j ( 240) j ( 240) I ms j ( wt is 240) j ( wt is 240) 1 j j
(e
e
)
(e
e
) (e e )
1 e j 240
2
2
2
4
cos(θ-240)
[e j ( wt is ) e j120
isc
e j ( wt is ) e j120
cosθ
e j ( wt is ) e j120
e j ( wt is ) e j120
e j ( wt is ) e j (120 240) e j ( wt is ) e j (120 240) e j ( wt is ) e j (120 240) e j ( wt is ) e j (120 240)
e j ( wt is ) e j 240
e j ( wt is ) e j 240
e j ( wt is ) e j 240
e j ( wt is ) e j 240
]
I ms
1 e j 240 [e j ( wt is ) (e j120 e j 360 e j 240 ) 3 e j ( wt is ) e j120 3 e j ( wt is ) e j120
4
3
3
j ( wt is )
j is
j120
j 360
j 240
j 360
j
j t
e
(e e e )] ( I ms 1 e e e ) e ( I mr 1 e j120 e j is e j ) e j t .
4
4
24.
33
j 0 j is j
j t
Ar B r C r [( I ms 1 e e
e
) e
( I mr 1 e j 0 e j is e j ) e j t ]
4
4
3
3
j 0 j is j
j t
[( I ms 1 e e
e
) e
( I ms 1 e j 240 e j is e j ) e j t ]
4
4
3
3
j 360 j is j
j t
[( I ms 1 e
e
e
) e
( I ms 1 e j120 e j is e j ) e j t ]
4
4
9
3
j is
j0
j
j t
( I ms 1 e e e ) e I ms 1 e j is e j (e j 0 e j 240 e j120 ) e j t
4
4
9
I ms 1 e j 0 e j ( t is ) e j .
4
25.
lmsr9
lmsr [ Ar B r C r ] (lmsr e j ) I ms 1 e j 0 e j ( t ir ) .
4
2
2
r ( ra a1 rb a2 rc a3 ) ( lr lmr lmsr )
3
3
2 3
3
9
j ( t ir )
j ( t ir )
j0
j0
( lr I mr 1 e e
lmr I mr 1 e e
(lmsr e j ) I ms 1 e j ( t is ) ]
3 2
2
4
3
j ( t ir )
j0
(lr lmr ) I mr 1 e e
( lmsr e j ) I ms 1 e j 0 e j ( t is ) .
2
Обозначим I r I mr 1 e
j ( t ir )
; I s I ms 1 e
j ( t is )
3
lmsr Lm .
; lr lmr Lr ;
2
Окончательно, вектор потокосцепления ротора:
j
r Lr I r (Lm e ) I s
(24)
26.
Векторные уравнения АД в различных системах координатИсходные уравнения
d S
;
U S I S RS
dt
d R
U R I R RR dt ;
S LS I S Lm e j I R ;
j
R LS I R Lm e I S .
Цель
d S
j k S ;
U S I S RS
dt
d RK
U R I R RR dt j ( k ) R ;
S LS I S Lm I R ;
RK LR I R Lm I S .
27.
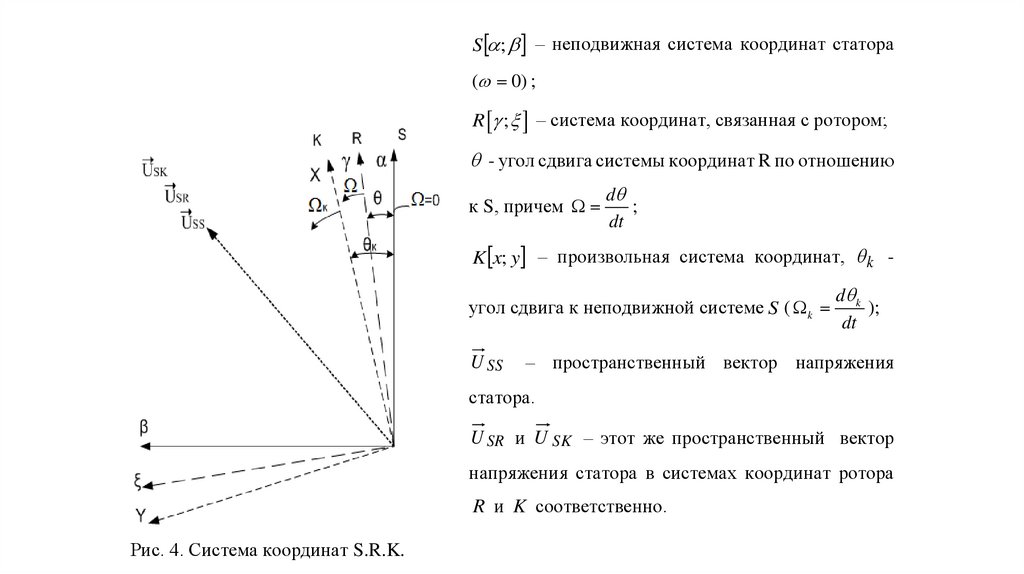
S ; – неподвижная система координат статора( 0) ;
R ; – система координат, связанная с ротором;
- угол сдвига системы координат R по отношению
к S, причем
d
;
dt
K x; y – произвольная система координат, k -
угол сдвига к неподвижной системе S ( k
U SS
d k
);
dt
– пространственный вектор напряжения
статора.
U SR и U SK – этот же пространственный вектор
напряжения статора в системах координат ротора
R и K соответственно.
Рис. 4. Система координат S.R.K.
28.
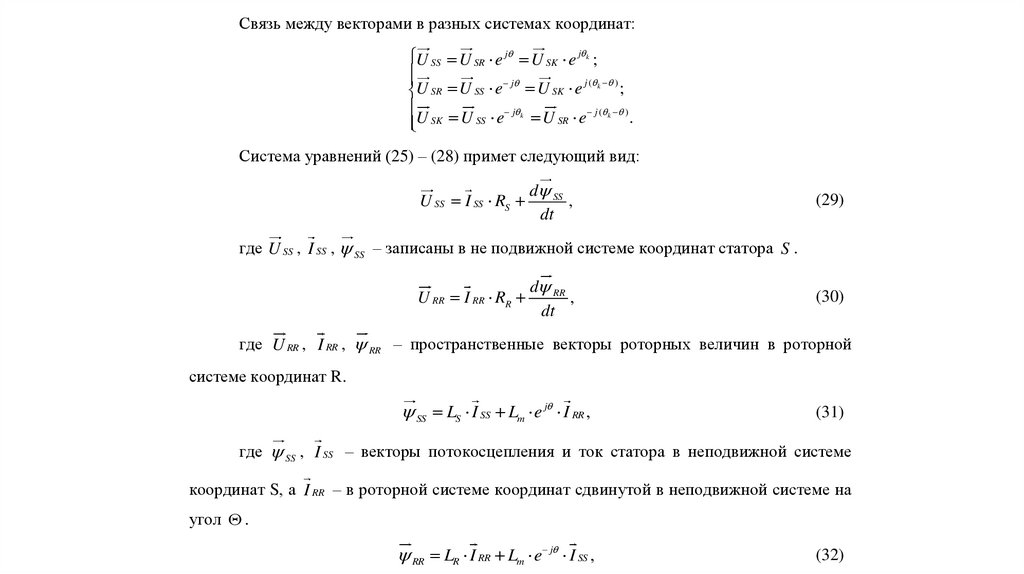
Связь между векторами в разных системах координат:U SS U SR e j U SK e j k ;
j ( )
j
U SR U SS e U SK e k ;
j k
U SR e j ( k ) .
U SK U SS e
Система уравнений (25) – (28) примет следующий вид:
U SS I SS RS
d SS
,
dt
(29)
где U SS , I SS , SS – записаны в не подвижной системе координат статора S .
U RR I RR RR
d RR
,
dt
(30)
где U RR , I RR , RR – пространственные векторы роторных величин в роторной
системе координат R.
SS LS I SS Lm e j I RR ,
(31)
где SS , I SS – векторы потокосцепления и ток статора в неподвижной системе
координат S, а I RR – в роторной системе координат сдвинутой в неподвижной системе на
угол .
RR LR I RR Lm e j I SS ,
(32)
29.
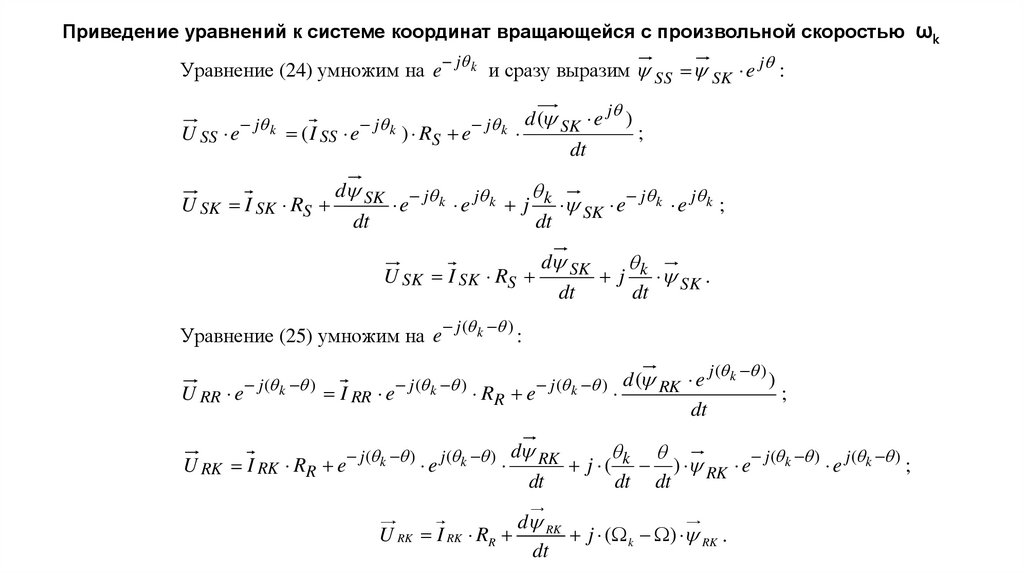
Приведение уравнений к системе координат вращающейся с произвольной скоростью ωkУравнение (24) умножим на e j k и сразу выразим SS SK e j :
U SS e
j k
( I SS e
U SK I SK RS
j k
) RS e
j k
d ( SK e j )
dt
;
d SK j k j k
e
e
j k SK e j k e j k ;
dt
dt
U SK I SK RS
d SK
j k SK .
dt
dt
Уравнение (25) умножим на e j ( k ) :
U RR e
j ( k )
I RR e
j ( k )
RR e
U RK I RK RR e j ( k ) e j ( k )
j ( k ) d ( RK e
j ( k )
dt
)
;
d RK
j ( k ) RK e j ( k ) e j ( k ) ;
dt
dt dt
U RK I RK RR
d RK
j ( k ) RK .
dt
30.
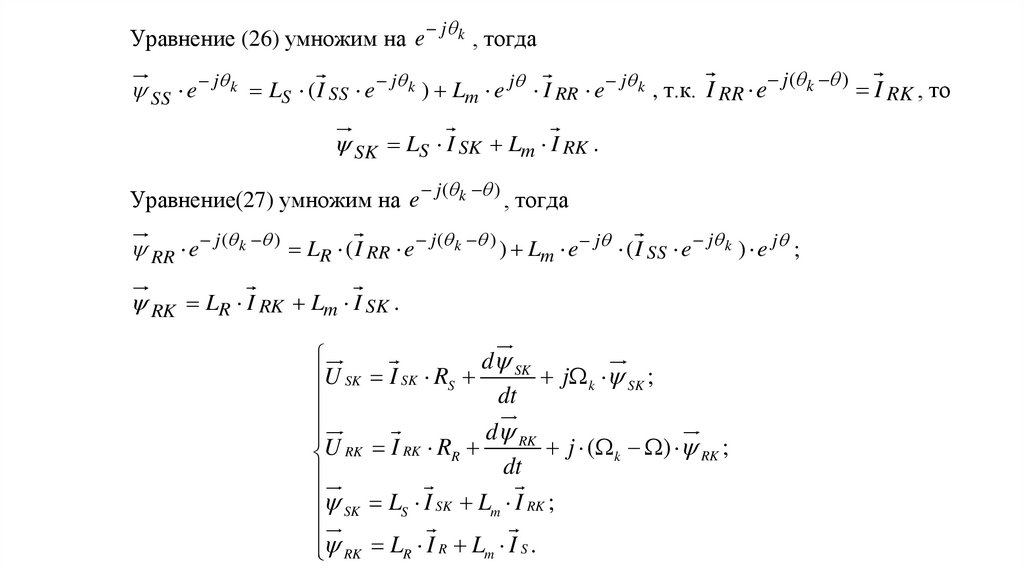
Уравнение (26) умножим на e j k , тогдаSS e j k LS ( I SS e j k ) Lm e j I RR e j k , т.к. I RR e j ( k ) I RK , то
SK LS I SK Lm I RK .
Уравнение(27) умножим на e j ( k ) , тогда
RR e j ( k ) LR ( I RR e j ( k ) ) Lm e j ( I SS e j k ) e j ;
RK LR I RK Lm I SK .
d SK
j k SK ;
U SK I SK RS
dt
d RK
U
I
R
j ( k ) RK ;
RK
RK
R
dt
SK LS I SK Lm I RK ;
RK LR I R Lm I S .