







 electronics
electronicsSimilar presentations:










Микропроцессорные системы автоматического управления в системах электроснабжения
1.
Курс «Микроэлектронные и микропроцессорные устройства вэнергетике»
Лектор: Зализный Д.И.
Лекция 12
Микропроцессорные системы
автоматического управления в
системах электроснабжения
2.
Системы автоматического управления (САУ):автоматика электропривода,
автоматика управления освещением,
автоматика управления компенсацией реактивной
мощности,
автоматика устройства регулирования напряжения
под нагрузкой (РПН) силового трансформатора,
автоматика охлаждения силового трансформатора
3.
Микропроцессорный электропривод4.
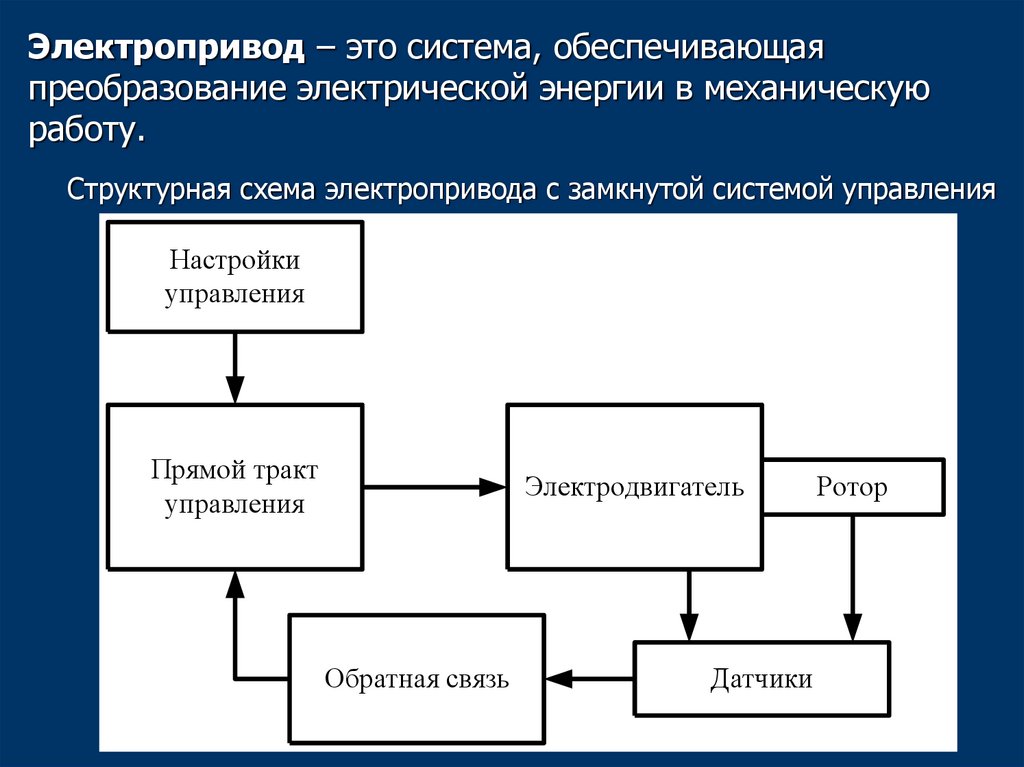
Электропривод – это система, обеспечивающаяпреобразование электрической энергии в механическую
работу.
Структурная схема электропривода с замкнутой системой управления
Настройки
управления
Прямой тракт
управления
Электродвигатель
Обратная связь
Датчики
Ротор
5.
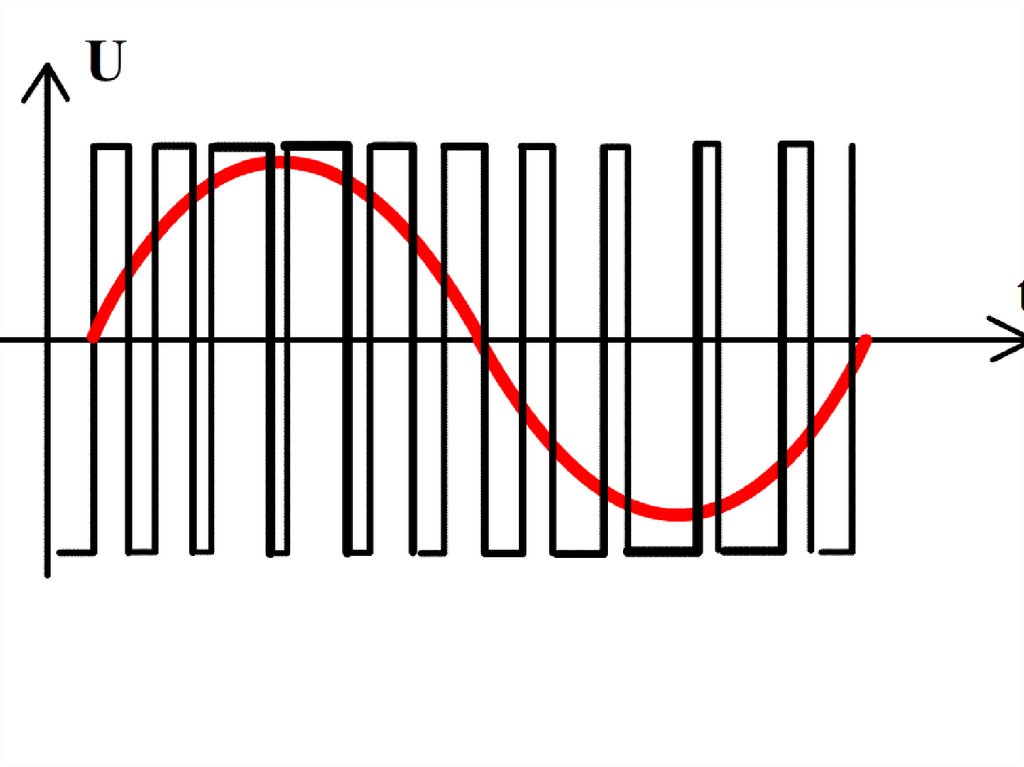
Преобразователи частоты – это микропроцессорныеустройства для управления электродвигателем
Датчики
обратной связи
Цифровой
контроллер
Блок силовых
электронных
ключей
6.
7.
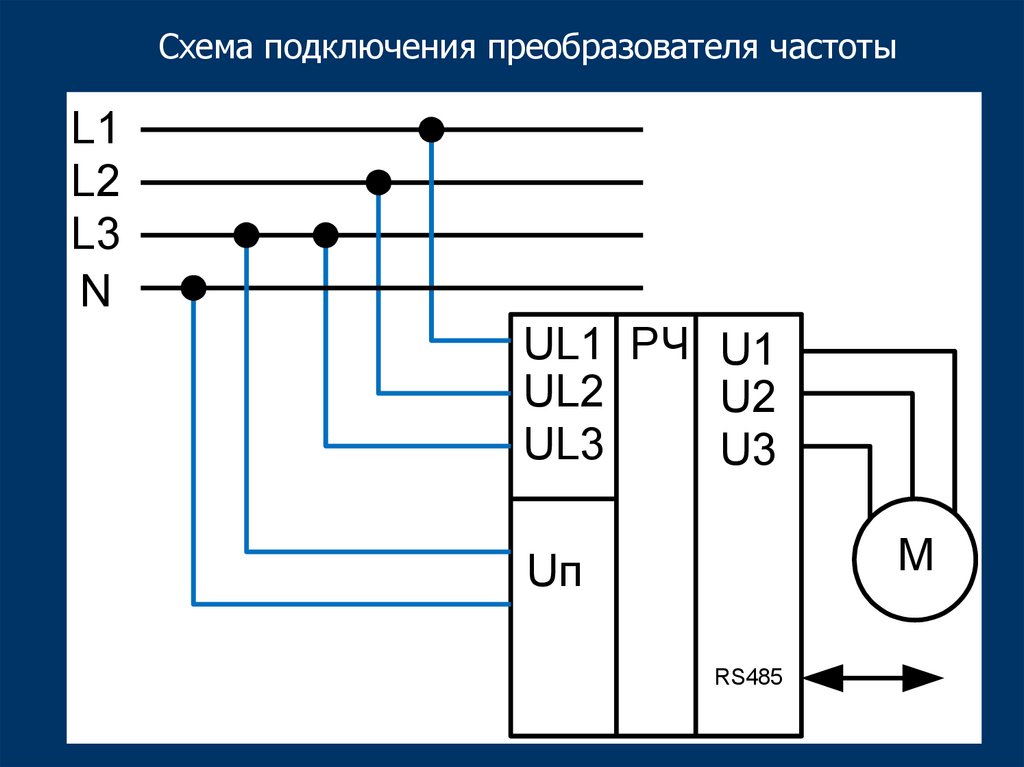
Схема подключения преобразователя частотыL1
L2
L3
N
UL1 РЧ U1
UL2
U2
UL3
U3
M
Uп
RS485
8.
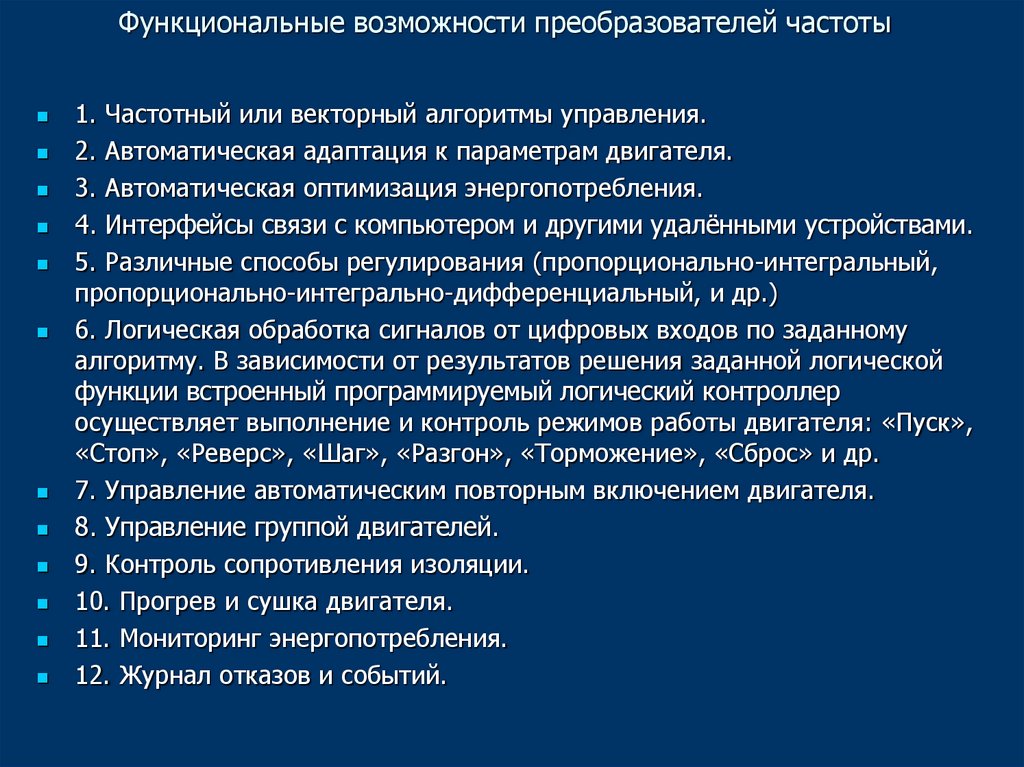
Функциональные возможности преобразователей частоты1. Частотный или векторный алгоритмы управления.
2. Автоматическая адаптация к параметрам двигателя.
3. Автоматическая оптимизация энергопотребления.
4. Интерфейсы связи с компьютером и другими удалёнными устройствами.
5. Различные способы регулирования (пропорционально-интегральный,
пропорционально-интегрально-дифференциальный, и др.)
6. Логическая обработка сигналов от цифровых входов по заданному
алгоритму. В зависимости от результатов решения заданной логической
функции встроенный программируемый логический контроллер
осуществляет выполнение и контроль режимов работы двигателя: «Пуск»,
«Стоп», «Реверс», «Шаг», «Разгон», «Торможение», «Сброс» и др.
7. Управление автоматическим повторным включением двигателя.
8. Управление группой двигателей.
9. Контроль сопротивления изоляции.
10. Прогрев и сушка двигателя.
11. Мониторинг энергопотребления.
12. Журнал отказов и событий.
9.
Микропроцессорная автоматика управления освещением10.
САУ для освещенияС плавной
регулировкой
Со ступенчатой
регулировкой
11.
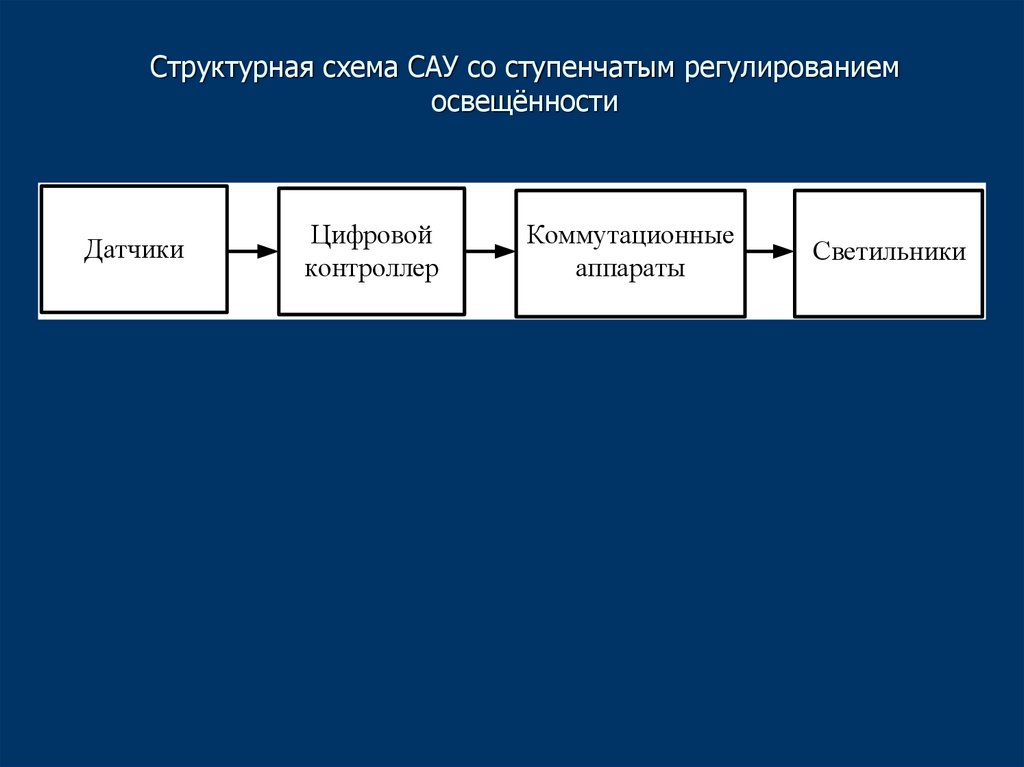
Структурная схема САУ со ступенчатым регулированиемосвещённости
Датчики
Цифровой
контроллер
Коммутационные
аппараты
Светильники
12.
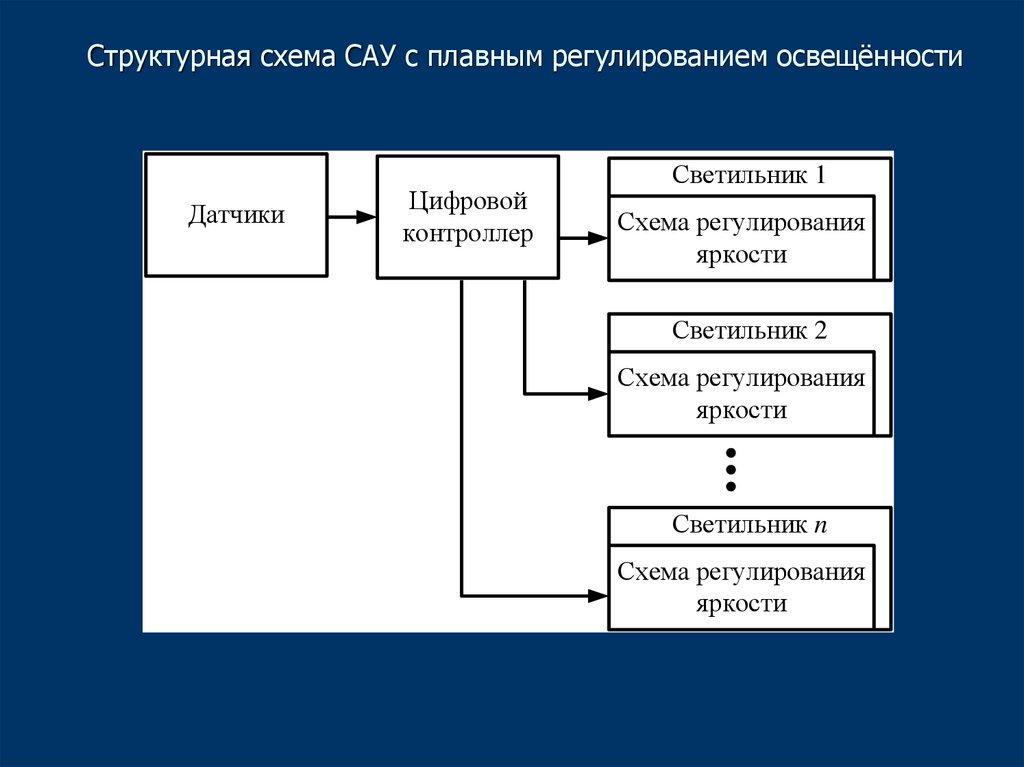
Структурная схема САУ с плавным регулированием освещённостиДатчики
Цифровой
контроллер
Светильник 1
Схема регулирования
яркости
Светильник 2
Схема регулирования
яркости
Светильник n
Схема регулирования
яркости
13.
Контроллер освещения К2000П14.
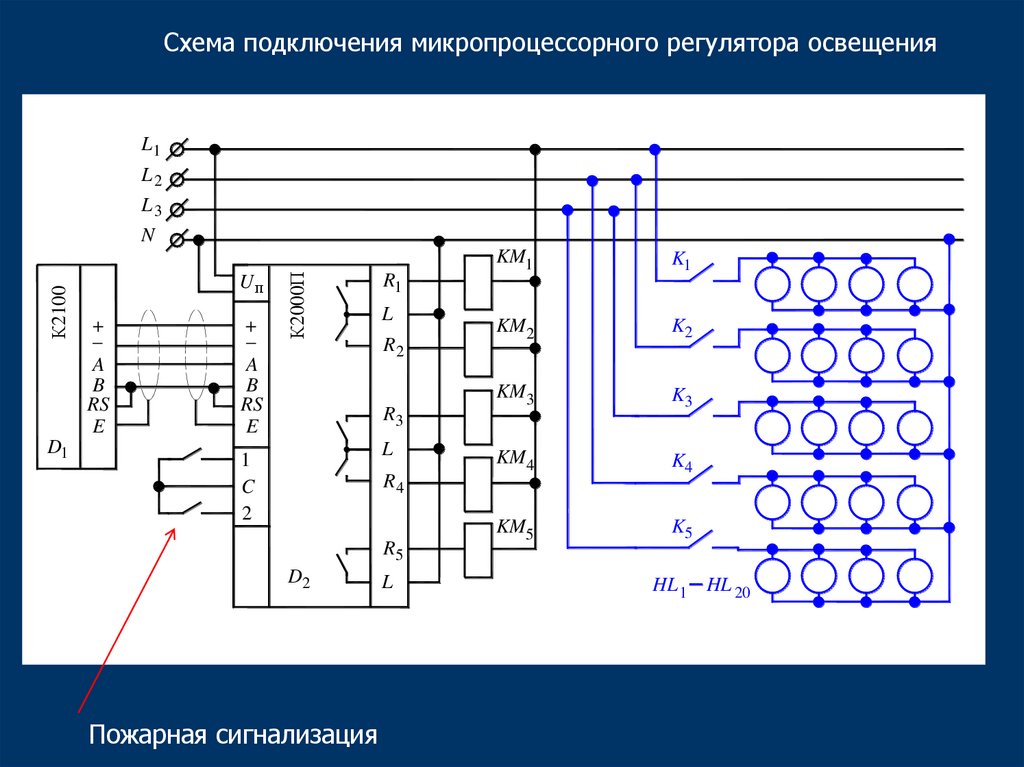
Схема подключения микропроцессорного регулятора освещенияL1
L2
L3
D1
Uп
+
_
A
B
RS
E
+
_
A
B
RS
E
К2000П
К2100
N
K1
KM2
K2
KM3
K3
KM 4
K4
KM5
K5
R1
L
R2
R3
L
1
C
2
KM1
R4
R5
D2
Пожарная сигнализация
L
HL 1 HL 20
15.
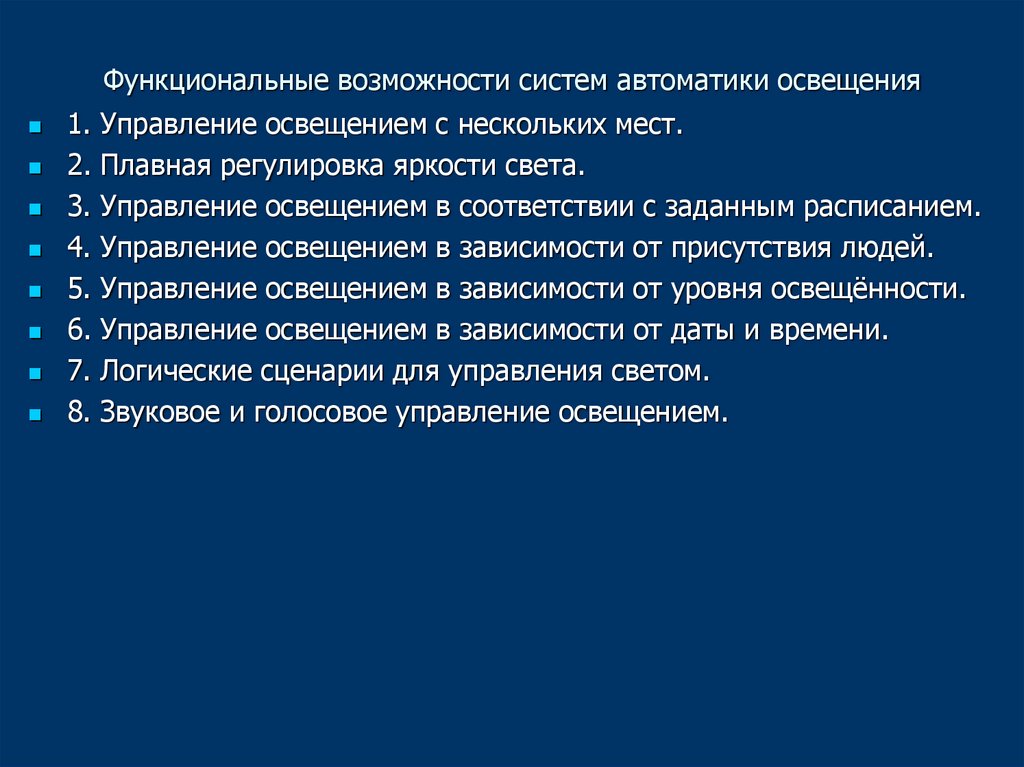
Функциональные возможности систем автоматики освещения1.
2.
3.
4.
5.
6.
7.
8.
Управление освещением с нескольких мест.
Плавная регулировка яркости света.
Управление освещением в соответствии с заданным расписанием.
Управление освещением в зависимости от присутствия людей.
Управление освещением в зависимости от уровня освещённости.
Управление освещением в зависимости от даты и времени.
Логические сценарии для управления светом.
Звуковое и голосовое управление освещением.
16.
Автоматика управлениякомпенсацией реактивной мощности
17.
Компенсирующие устройстваБатареи конденсаторов
Синхронные машины
Плавная регулировка
Реакторы
Тиристорные
компенсаторы
Ступенчатая регулировка
18.
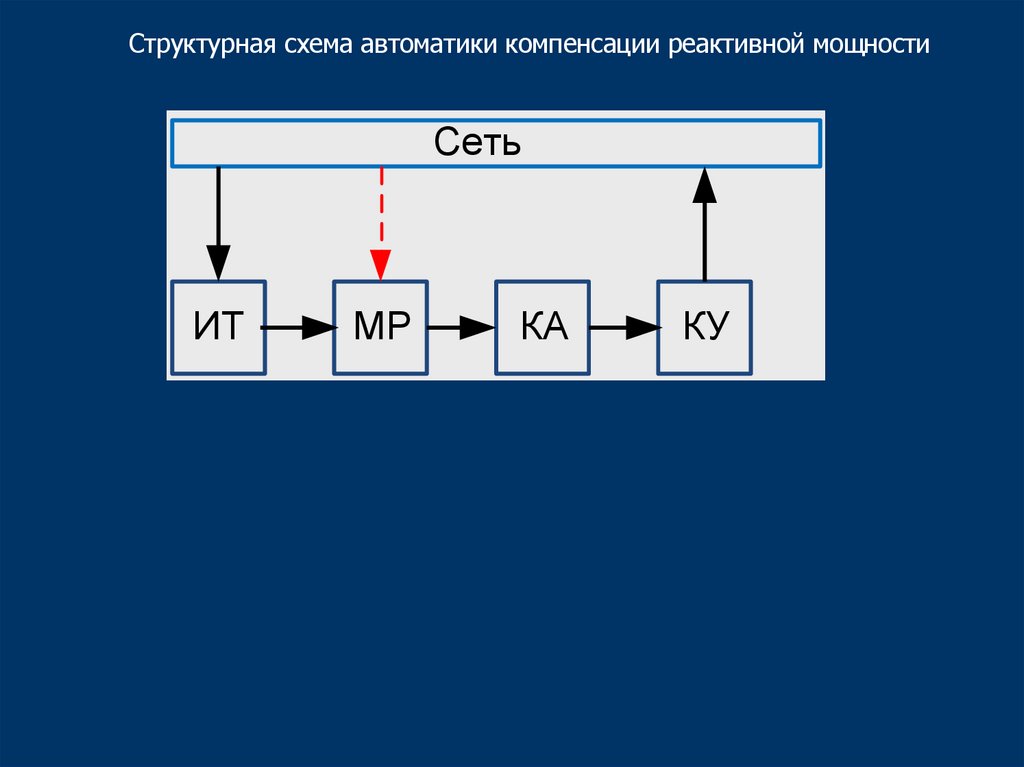
Структурная схема автоматики компенсации реактивной мощностиСеть
ИТ
МР
КА
КУ
19.
Микропроцессорный регулятор реактивной мощности MRM-12Недокомпенсация
Перекомпенсация
Секции БК
Уставки и тип
характеристики
Зона
нечувствительности
20.
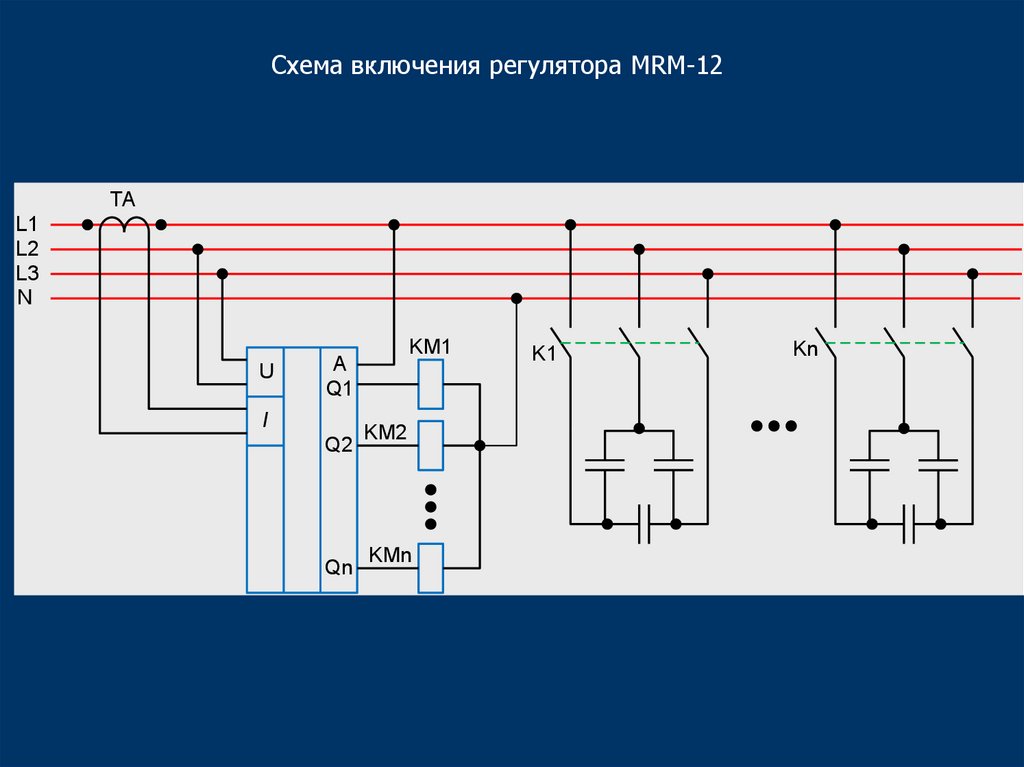
Схема включения регулятора MRM-12TA
L1
L2
L3
N
U
KM1
A
Q1
I
Q2
Qn
KM2
KMn
K1
Kn
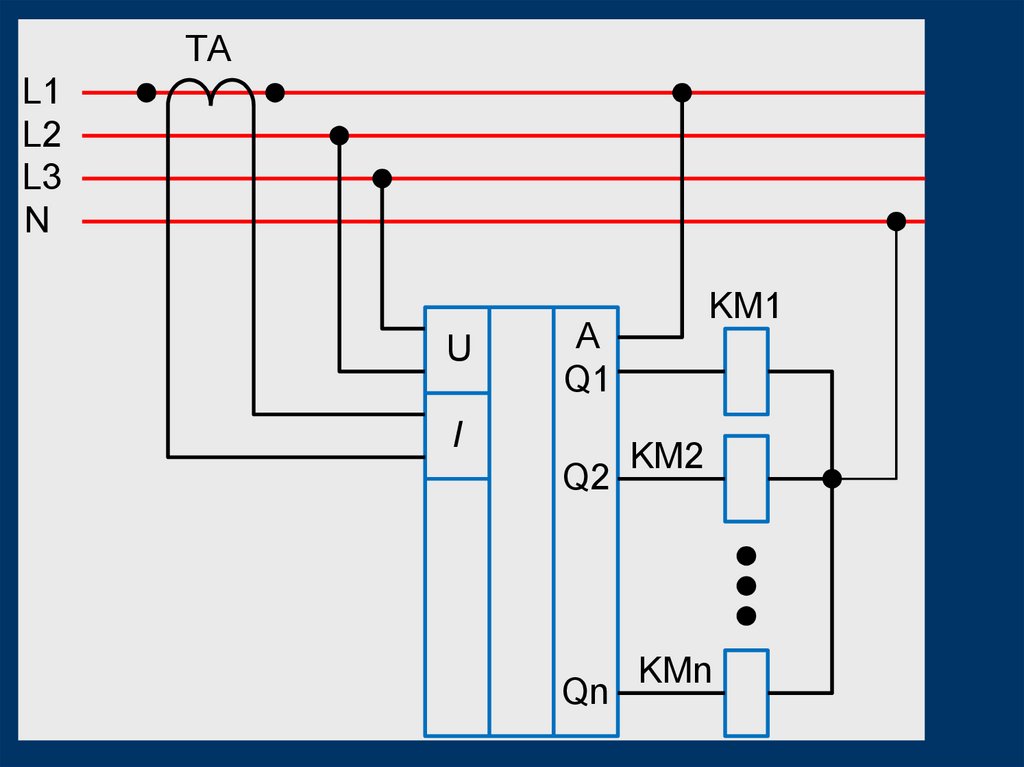
21.
TAL1
L2
L3
N
U
KM1
A
Q1
I
Q2
Qn
KM2
KMn
K1
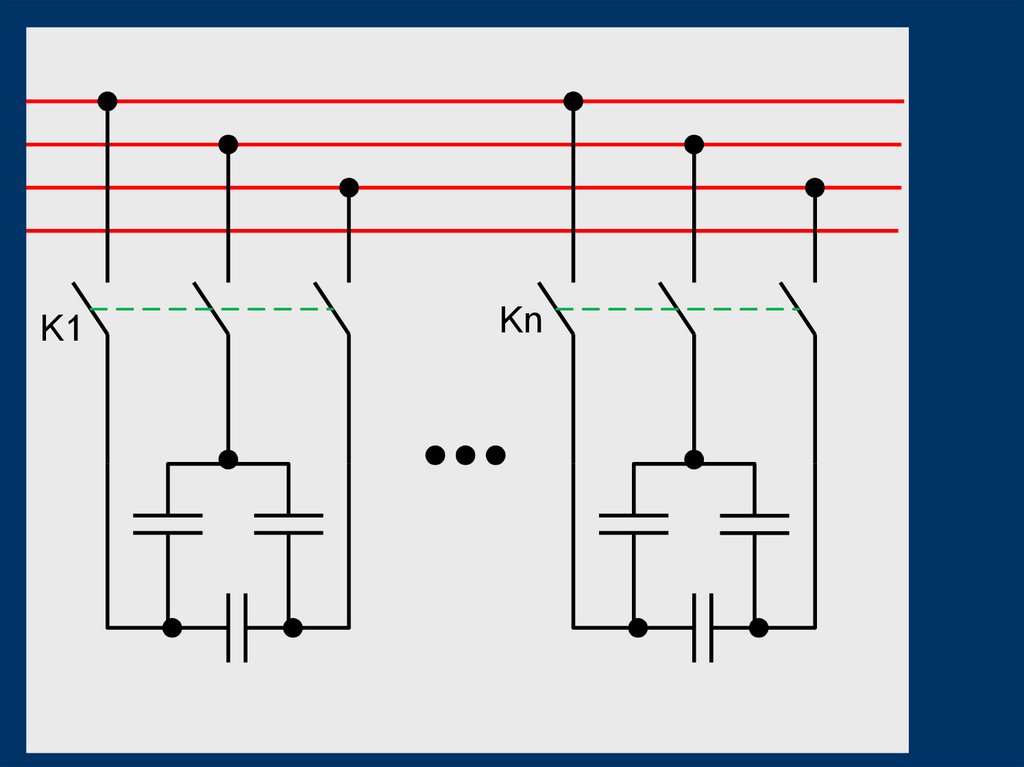
22.
K1Kn
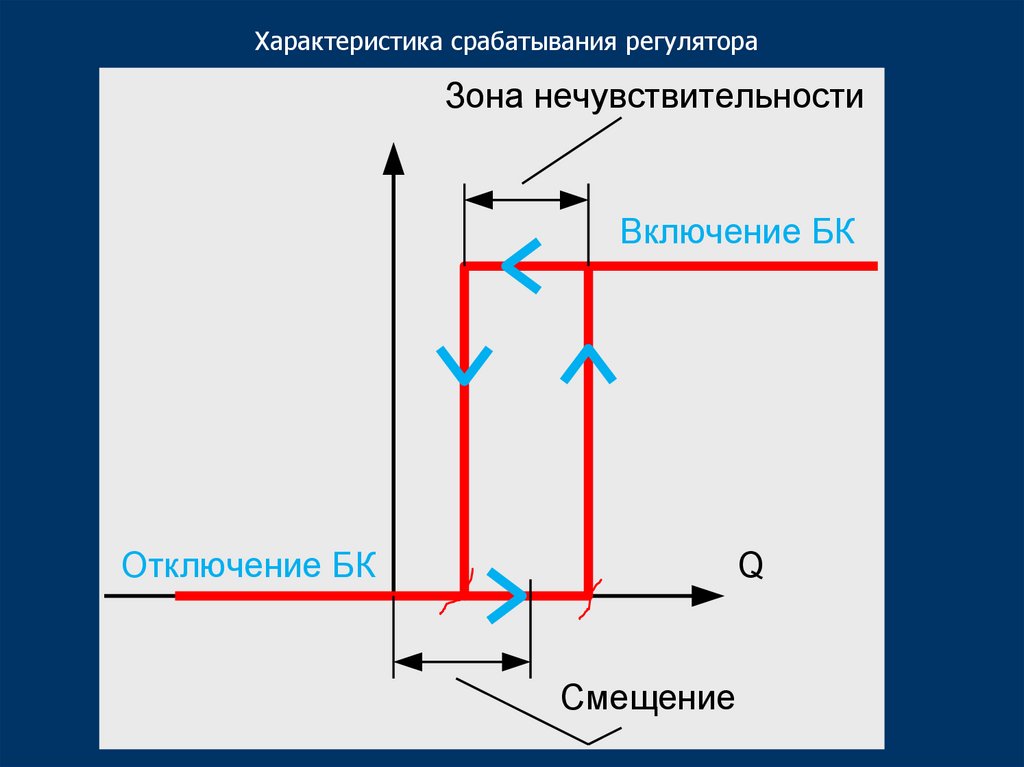
23.
Характеристика срабатывания регулятораЗона нечувствительности
Включение БК
Отключение БК
Q
Смещение
24.
Регулятор контролирует время разрядки БК и в первую очередь подключаетразряженные секции
Режим 1 - алгоритм быстрого приближения к требуемой степени компенсации.
Растущие значения ёмкости пропорционально: 1:2:4:8
Режим 2 - алгоритм медленного, но точного приближения
к требуемой степени компенсации.
Растущие значения ёмкости пропорционально: 1:2:2:2
Режим 3 - алгоритм с контролем прироста индуктивной мощности.
Растущие значения ёмкости пропорционально: 1:2:4:4:4:8
Режим 4 - алгоритм быстрого приближения к требуемой степени компенсации.
Растущие значения ёмкости пропорционально: 1:2:4:8
25.
Низковольтные конденсаторы26.
Шкафы низковольтных конденсаторных установок27.
Автоматика РПН силовых трансформаторов28.
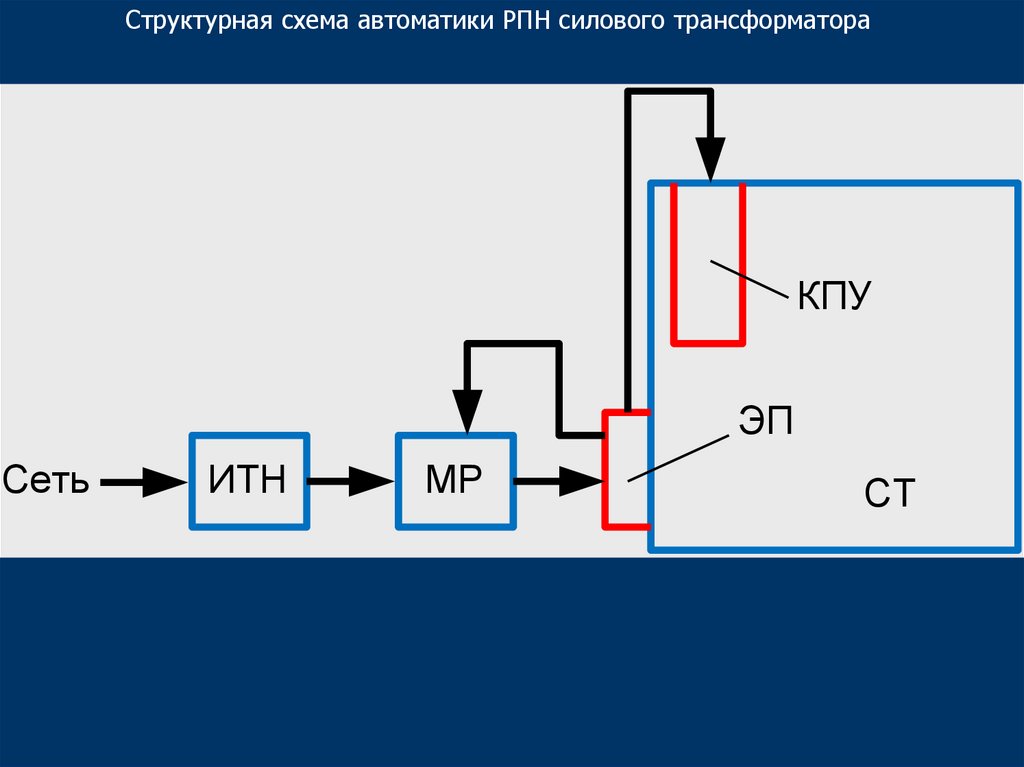
Структурная схема автоматики РПН силового трансформатораКПУ
ЭП
Сеть
ИТН
МР
СТ
29.
Переключающее устройство РПН силового трансформатора30.
ПриводРПН
31.
Зона нечувствительности РПН32.
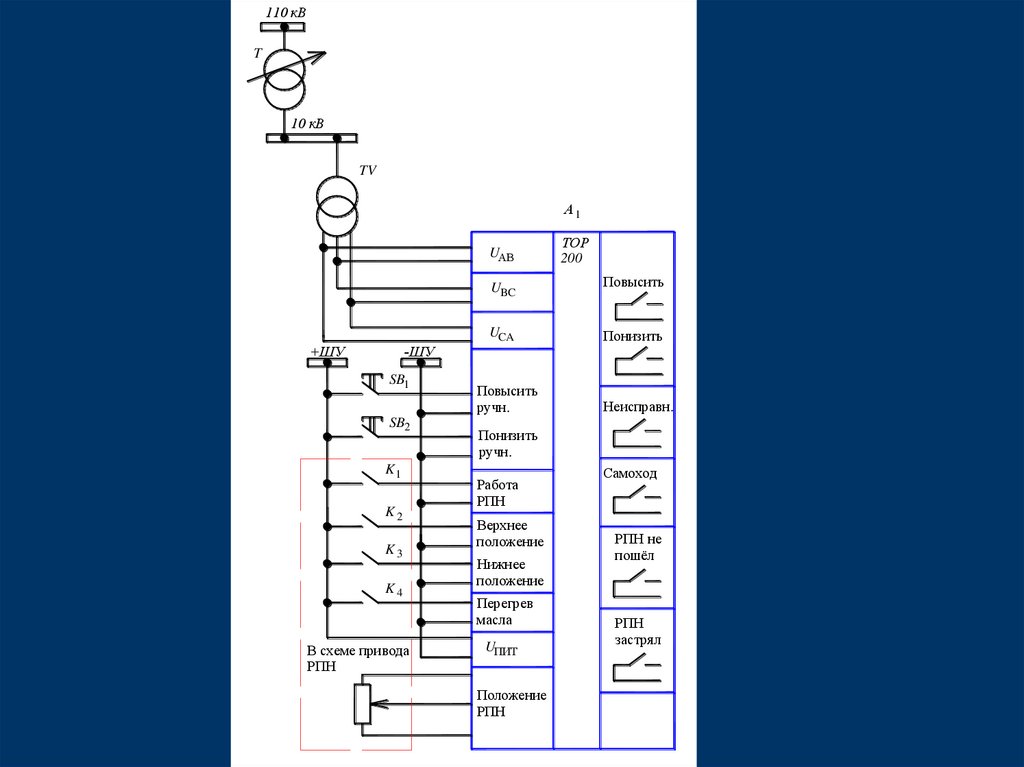
110 кВT
10 кВ
TV
А1
UАB
UBC
UCA
+ШУ
-ШУ
SB1
SB2
K1
K2
K3
K4
В схеме привода
РПН
Повысить
ручн.
TОР
200
Повысить
Понизить
Неисправн.
Понизить
ручн.
Работа
РПН
Верхнее
положение
Нижнее
положение
Перегрев
масла
UПИТ
Положение
РПН
Самоход
РПН не
пошёл
РПН
застрял
33.
Автоматика охлаждения силового трансформатора34.
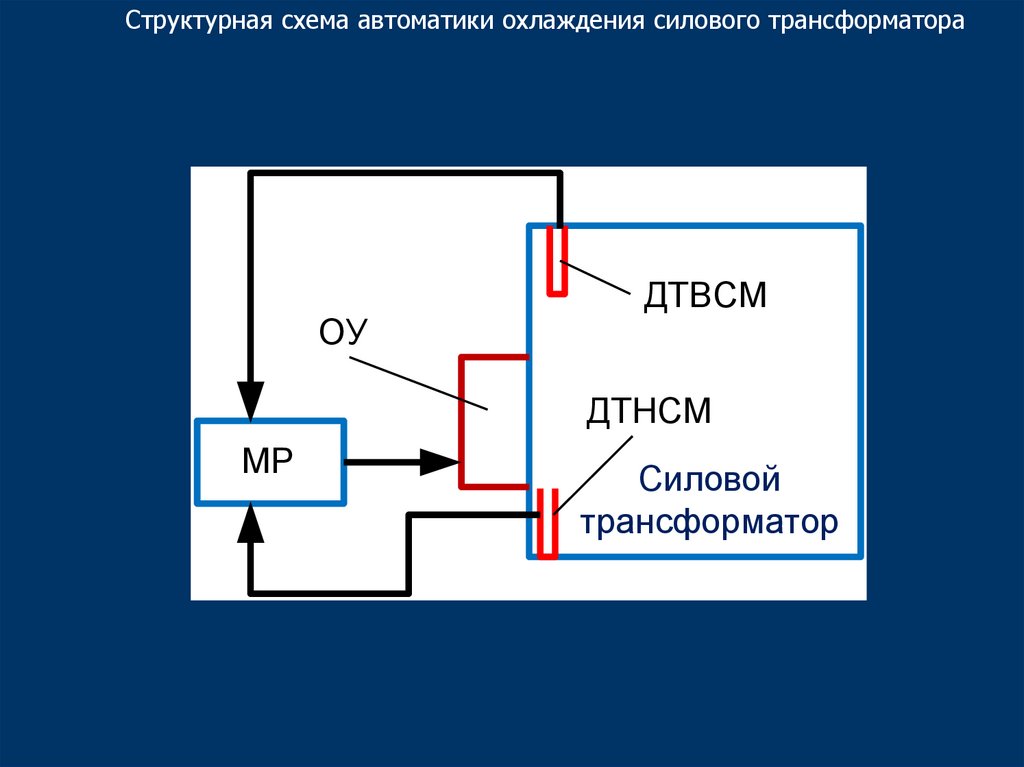
Структурная схема автоматики охлаждения силового трансформатораОУ
ДТВСМ
ДТНСМ
МР
Силовой
трансформатор