



 mechanics
mechanicsSimilar presentations:










Друге суміщення руху робочих органів
1.
Друге суміщення рухуробочих органів
2.
3К
d3
d
Q2 xx
Sd2
d2
c
2
Рис.1. Схема другого суміщення
3.
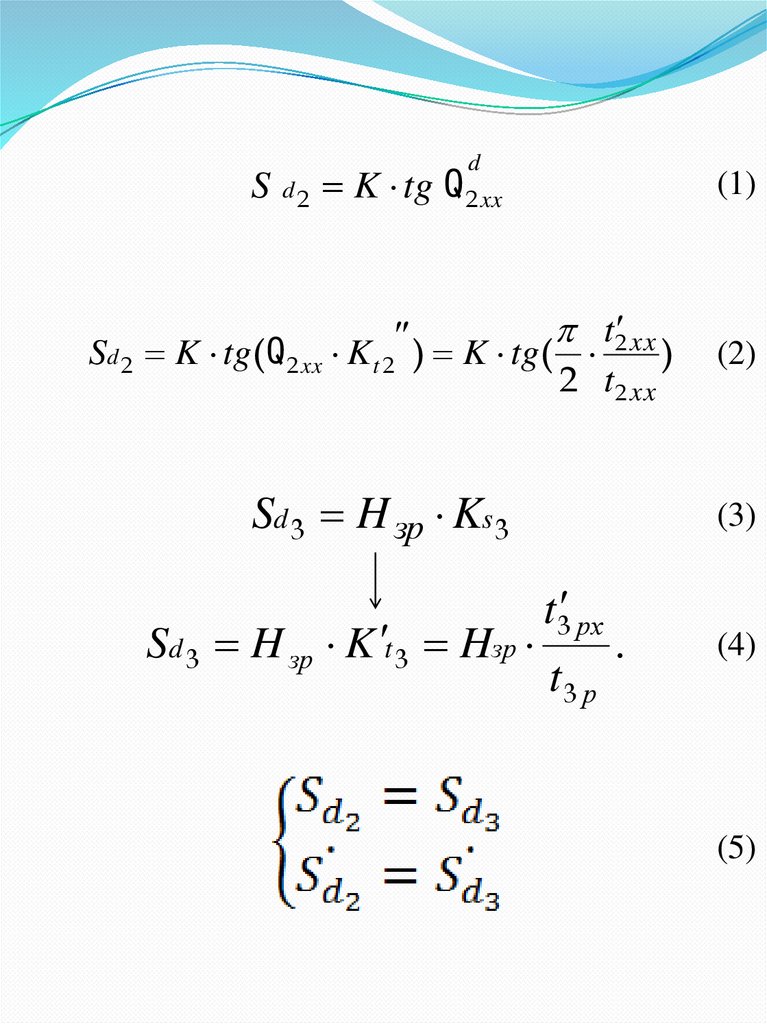
Sd
d2
K tg Q 2 xx
(1)
t2 xx
Sd 2 K tg (Q 2 xx K t 2 ) K tg (
)
2 t2 xx
(2)
Sd 3 H зр Ks 3
(3)
Sd 3 H зр K t 3 Hзр
t 3 рх
t3 р
.
(4)
(5)
4.
tgβ d 2t2 xx
d K tg
dSd 2
2 t2 xx
dt
dt
tgβ d 3
K
2
t2 xx
t2 xx cos
2 t2 xx
2
t 3 рx
d H зр
H
t
dS d 3
3
рx
зр
.
dt
dt
t 3 рx
H зр
t 3 рx
t2 xx
2
2
arc cos
K t3 px
H зрх t2 xx
(7)
(8)
t2 xx
t 2 xx cos
2 t2 xx
t2 xx
K 2
, (6)
.
(9)
5.
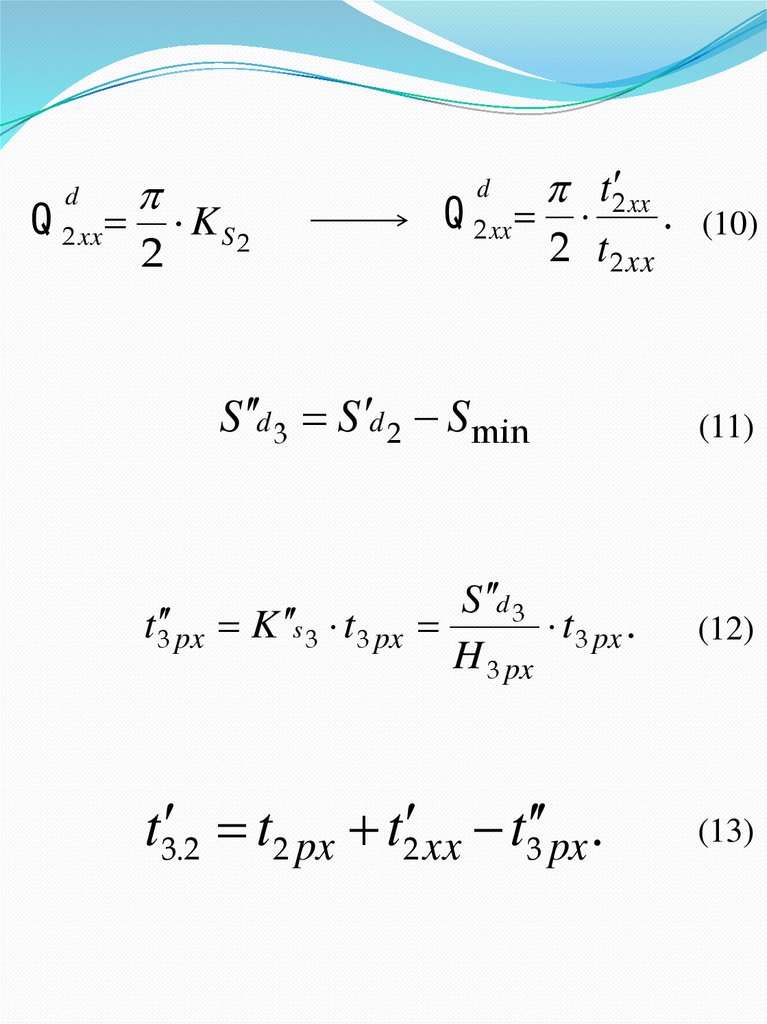
dQ 2 xx
2
KS2
t2 xx
Q 2 xx
.
2 t2 xx
d
S d 3 S d 2 Smin
t 3 px K s 3 t 3 px
S d 3
t 3 px .
H 3 px
t3 .2 t2 px t2 xx t3 px .
(10)
(11)
(12)
(13)
6.
HHзр
Е
Smin
F
d2
'
Sd2
d3
''
S d3
'
t 2 xx
t 2 xx
'
d3
''
t3 px
t
t3 px
Рис. 2 Графічний метод виконання другого суміщення