













 physics
physics electronics
electronicsSimilar presentations:


")




")
")

Высокоточные системы навигации. Лекция №1.2
1. ВЫСОКОТОЧНЫЕ СИСТЕМЫ НАВИГАЦИИ Лекция №1.2
МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТИМЕНИ Н.Э.БАУМАНА
ВЫСОКОТОЧНЫЕ СИСТЕМЫ
НАВИГАЦИИ
Лекция №1.2
Основные понятия и определения
2. Задачи, решаемые гироприборами в системах ориентации, стабилизации и навигации Л.А.
Гироприборы – чувствительные элементы систем ориентации,стабилизации и навигации.
Используются так же как исполнительные органы, которые
позволяют осуществлять приложение сил и моментов к управляемому
объекту без расхода рабочего тела.
Большинство задач, решаемых гироскопическими системами,
можно рассматривать как задачи систем автоматического управления.
Например, рассмотрим задачу управления баллистической ракеты.
3. Задача управления баллистической ракетой
0 – точка стрельбы (старта)0NEL- географическая система координат (СК)
0ХоУоZо – стартовая СК
Ао – азимут стрельбы
4.
Во время полета ракеты приборы должны измерять углы (уголрыскания), (угол тангажа) и (угол крена для самолета или угол
вращения для ракеты) и угловые скорости ракеты.
Для управления движением центра масс ракеты и формирования
команды на выключение двигательной установки должны измеряться
составляющие ускорения или скорости центра масс ракеты на
связанные с ней оси или на оси, неизменно ориентированные в
пространстве (например, параллельные осям стартовой с.к.). Эту
задачу выполняют акселерометры или гироскопические интеграторы
линейных ускорений (ГИЛУ).
Система координат, в которой решается задача навигации, м.б.
материальной (т.е. реализованной с помощью гиростабилизированной
платформы) или виртуальной (реализованной с помощью вычислителя) –
это бесплатформенные инерциальные системы навигации (БИНС).
Задача управления: управлять движением ЦМ, сравнивать текущие
координаты с требуемыми и вводить согласования требуемых
координат с текущими. Кроме задачи управления существует
задача стабилизации объекта относительно Ц.М. и
задача управления движением вокруг Ц.М.
5. Тактико-технические требования к гироприборам:
1. Точность2. Надежность (ресурс)
3. Время готовности к применению
4. Габаритно-массовые характеристики
6.
7.
8.
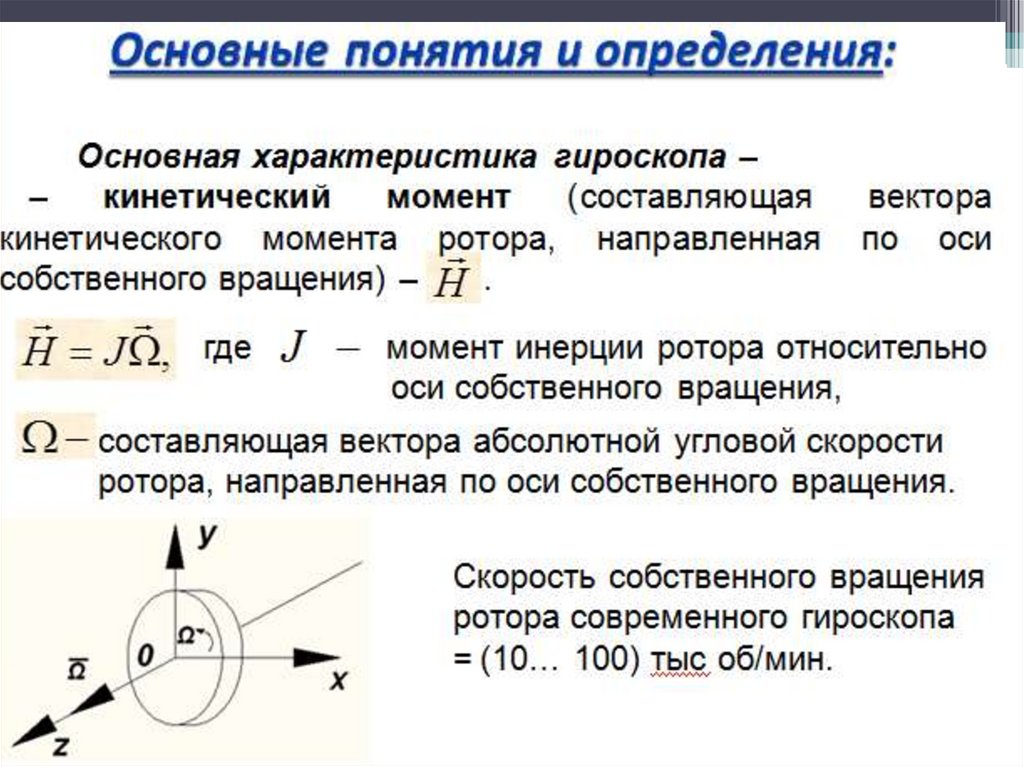
9. Определения гироскопа
В связи с развитием гироскопов на новых физическихпринципах существенно изменилось определение гироскопа.
Классическое определение гироскопа: «Гироскоп – это
быстровращающееся симметричное твердое тело с одной
неподвижной точкой».
В силу симметрии эллипсоид инерции относительно
неподвижной точки гироскопа является эллипсоидом
вращения, а любая его ось в экваториальной плоскости,
перпендикулярной оси гироскопа, является главной осью
инерции. Ось собственного вращения гироскопа является
главной центральной осью инерции.
10.
11. Современное определение гироскопа
Гироскоп – это устройство, содержащее материальный объект,который совершает быстрые периодические движения, и
чувствительное вследствие этого к вращению в инерциальном
пространстве.
Примечание
1. Материальным объектом – носителем быстрых периодических
Движений в гироскопе – м.б. твердое тело, жидкость или газ,
электромагнитное поле и т.д.
2. Быстрые периодические движения могут быть вращательными,
колебательными и т.д.
12.
13. Гироскоп в кардановом подвесе
14.
15. Изображение трехстепенного гироскопа:
1 – ротор2 – внутренняя рамка (кожух)
3 – наружная рамка
XYZ – связана с внутренней рамкой.
16. Упрощенное изображение гироскопов:
ТрехстепенногоДвухстепенного
17. Внутренний карданов подвес
18.
19.
20.
21.
22.
23.
24.
25.
26.
27. Три основные задачи, к которым сводится применение гироскопов в технике
1. Ориентация – задача управления угловым расположением объектаотносительно некоторой инерциальной с.к. При этом
происходит движение объекта относительно ц.м.
2. Навигация – задача управления движением объекта относительно
некоторой с.к. , т.е. движение ц.м. объекта относительно
с.к.
3. Стабилизация – задача обеспечения отсутствия движения и
углов поворота относительно заданных осей
ориентации.