



















 mechanics
mechanicsSimilar presentations:










Теория механизмов и машин. Курс лекции
1.
Теориямеханизмов
и машин
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
1
2.
05.09.20202
3.
ЛИТЕРАТУРА1.Артоболевский И.И. Теория механизмов и
машин. - М.: Наука, 1988. - 632с.
2.Фролов К.В., Попов С.А., Мусатов А.К.,
Тимофеев Г.А.Теория механизмов и
механика машин / Учебник для втузов. – М.:
изд. МГТУ им. Н.Э. Баумана, 2009. – 688 с.
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
3
4.
Дисциплина ТММ как и многие прикладные разделымеханики возникла в начале 30-х г. Основоположниками
являются Л.Эйлер, Леонардо де Винчи, Ш.Кулон,
П.Чебышев. С19в.и по настоящее время приобрела глубокий
научный подход в создании и изобретении большого количества машин и механизмов применяемых в различных отраслях
промышленности, в том числе и в нефтегазовой отрасли.
ТММ - научная дисциплина об общих
методах исследования, построения,
кинематики и динамики механизмов.
05.09.2020
4
5.
При изучении дисциплины студенты должны знать термины,определения и обозначения различных параметров машин и
механизмов, уметь выполнять структурный анализ конкретных
механизмов и определять кинематические и динамические
параметры.
Целью изучения дисциплины является научить
будущего специалиста понимать и оценивать механические
процессы и явления возникающие в типовых механизмах
и применять их в практической деятельности.
05.09.2020
5
6.
СТРУКТУРНЫЙИ КИНЕМАТИЧЕСКИЙ АНАЛИЗ
РЫЧАЖНЫХ МЕХАНИЗМОВ.
05.09.2020
6
7.
1. Основные понятия и определения2. Структурный анализ рычажных
механизмов
3. Кинематический анализ рычажных
механизмов. Метод планов скоростей.
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
7
8.
Машина – это техническая система, выполняющаямеханическое движение для преобразования энергии,
материалов и информации. Все машины
предназначены для облегчения физического и
умственного труда человека, т. е. для повышения его
качеств и производительности.
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
8
9.
МАШИНАРАБОЧАЯ
КИБЕРНЕТИЧЕСКАЯ
ЭНЕРГЕТИЧЕСКАЯ
ИНФОРМАЦИОННАЯ
05.09.2020
9
10.
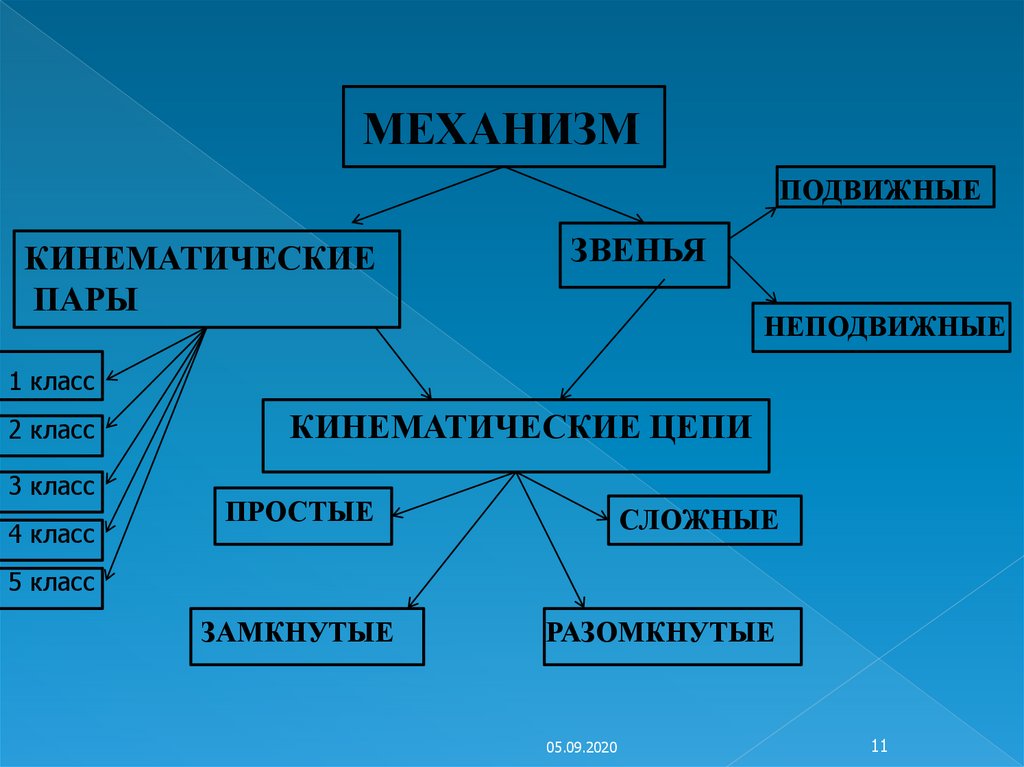
Механизм – это техническая система, состоящая изподвижных звеньев, стойки и кинематических пар,
образующих кинематические цепи.
.
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
10
11.
МЕХАНИЗМПОДВИЖНЫЕ
КИНЕМАТИЧЕСКИЕ
ПАРЫ
ЗВЕНЬЯ
НЕПОДВИЖНЫЕ
1 класс
2 класс
3 класс
4 класс
КИНЕМАТИЧЕСКИЕ ЦЕПИ
ПРОСТЫЕ
СЛОЖНЫЕ
5 класс
ЗАМКНУТЫЕ
РАЗОМКНУТЫЕ
05.09.2020
11
12.
Назначение механизмов преобразованияперемещений входных звеньев и приложенных к ним
силовых факторов в требуемые перемещения и
силовые факторы выходных звеньев.
Любые механизмы должны удовлетворять
требованиям, заданным в техническом задании на их
проектирование, соответствие которым определяет
качество механизмов. В общем случае качество
структуры механизма определяется простотой
конструкции, технологичностью звеньев,
экономичностью, надежностью, долговечностью,
габаритами и массой.
Оценка работоспособности механизма
осуществляются по эксплутационным факторам, к
которым относятся: прочность, жесткость,
износостойкость, виброустойчивость, теплостойкость
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
12
13.
Оценка работоспособностиМЕХАНИЗМ
ЭКСПЛУАТАЦИОННЫЕ ФАКТОРЫ
ПРОЧНОСТЬ
ЖЕСТКОСТЬ
ТЕПЛОСТОЙКОСТЬ
ВИБРОУСТОЙЧИВОСТЬ
ИЗНОСОСТОЙКОСТЬ
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
13
14.
Техническая система предназначенадля выполнения определенных функций
и имеет собственную структуру.
СТРУКТУРА
ТЕХНИЧЕСКОЙ СИСТЕМЫ
ДЕТАЛИ
Абдюкова Р.Я.,кафедра МТМ
УЗЛЫ
07.11.14.
14
15.
Деталь – это элемент структурытехнической системы, не
имеющий внутренних связей.
Узел – это совокупность нескольких
деталей конструктивно или
функционально связанных между
собой.
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
15
16.
Механизмы предназначены дляпередачи и преобразования
перемещений входных звеньев и
приложенных к ним силовых факторов
в требуемые перемещения и силовые
факторы выходных звеньев.
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
16
17.
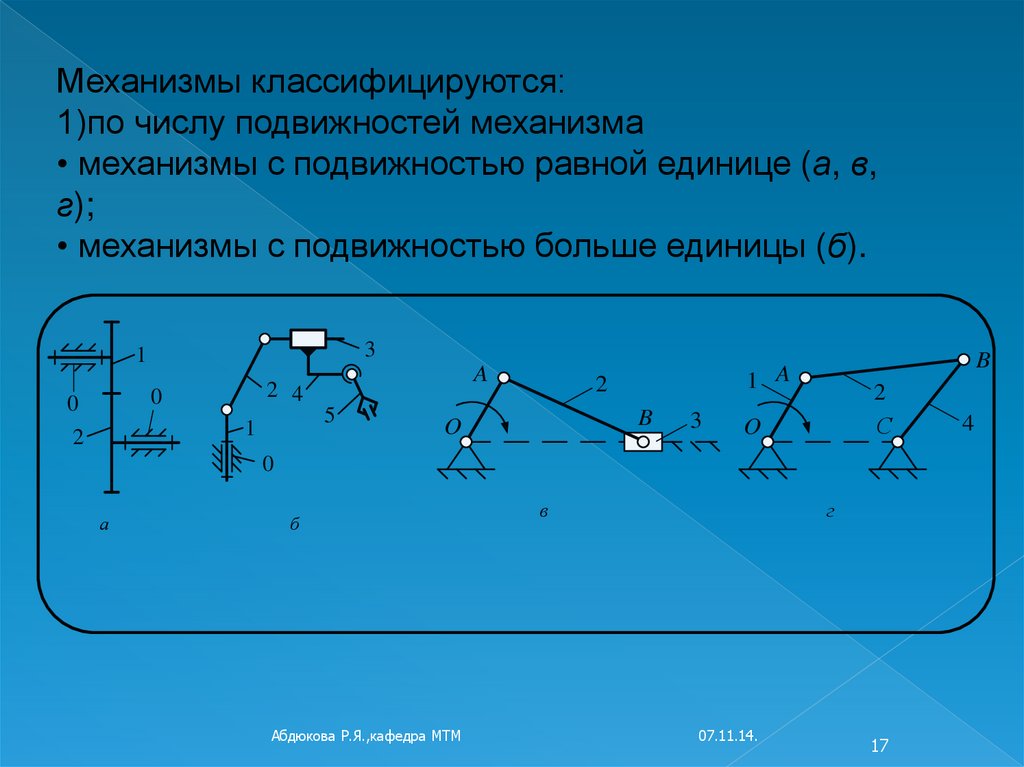
Механизмы классифицируются:1)по числу подвижностей механизма
• механизмы с подвижностью равной единице (а, в,
г);
• механизмы с подвижностью больше единицы (б).
3
1
2 4
0
0
5
1
2
A
2
B
O
B
1 A
3
2
С
O
0
а
б
Абдюкова Р.Я.,кафедра МТМ
в
г
07.11.14.
17
4
18.
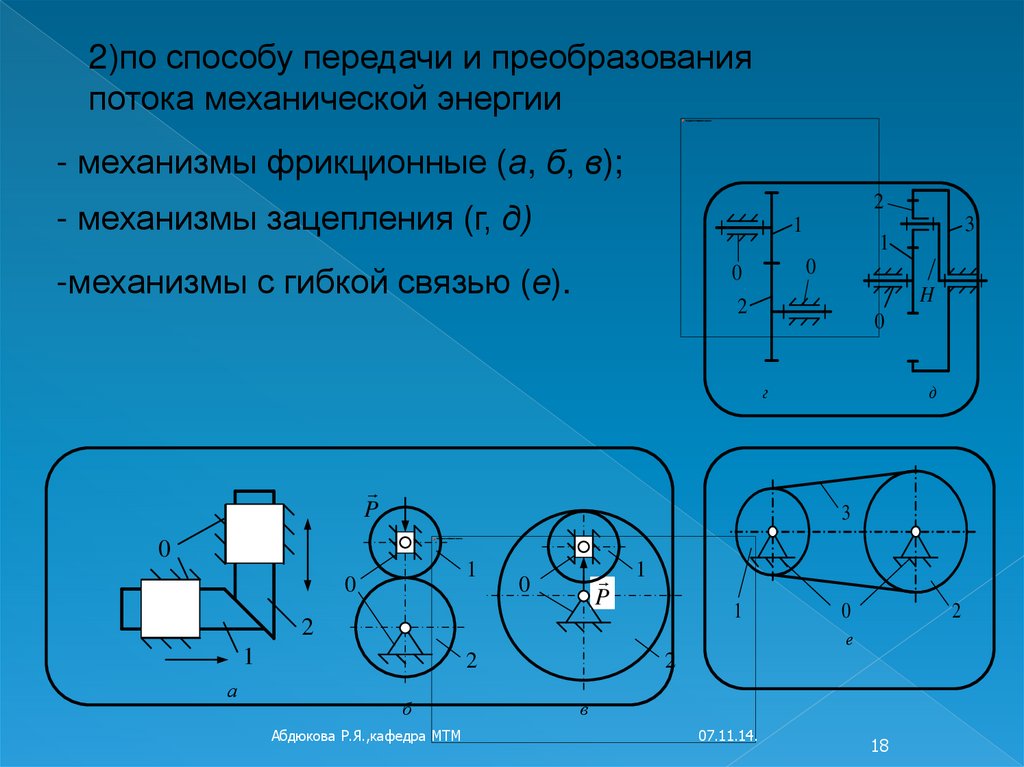
2)по способу передачи и преобразованияпотока механической энергии
- механизмы фрикционные (а, б, в);
2
- механизмы зацепления (г, д)
1
-механизмы с гибкой связью (е).
1
0
0
H
2
0
г
P
д
3
0
1
0
P
0
1
1
2
0
2
е
1
а
3
2
б
Абдюкова Р.Я.,кафедра МТМ
2
в
07.11.14.
18
19.
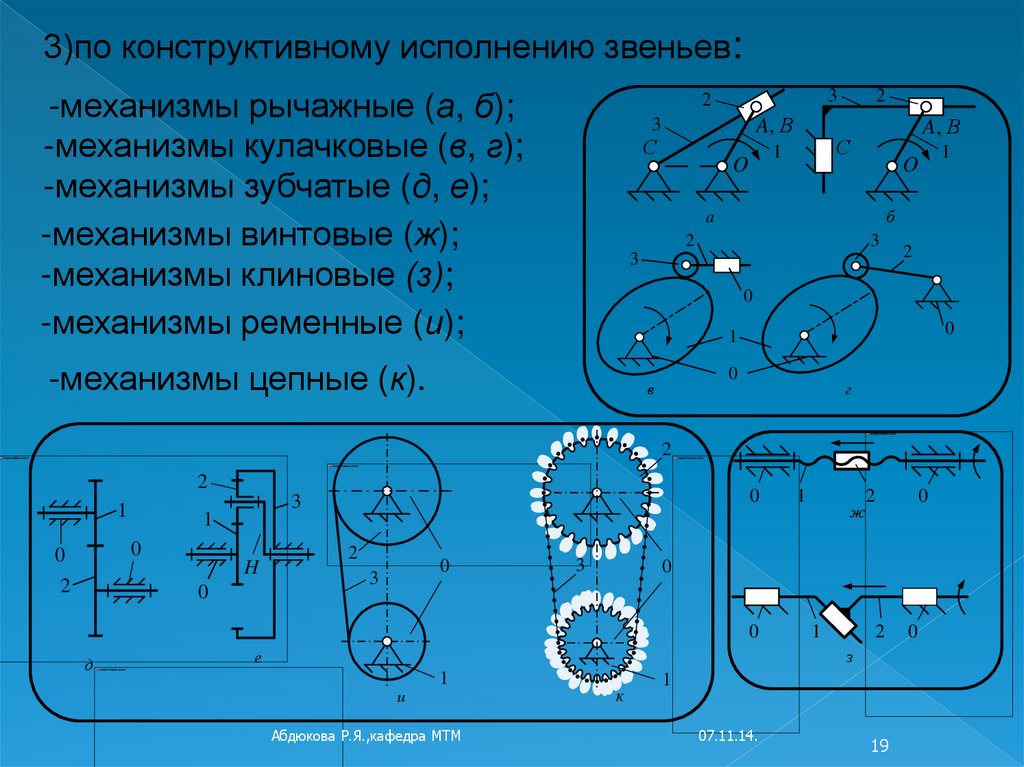
3)по конструктивному исполнению звеньев:-механизмы рычажные (а, б);
-механизмы кулачковые (в, г);
-механизмы зубчатые (д, е);
-механизмы винтовые (ж);
-механизмы клиновые (з);
-механизмы ременные (и);
3
2
A, В
3
С
A, В
С
1
O
2
O
б
a
2
3
3
2
0
0
1
-механизмы цепные (к).
0
в
г
2
2
1
0
0
H
2
0
3
1
0
2
0
3
3
1
ж
2
0
0
0
д
1
2
з
е
и
1
Абдюкова Р.Я.,кафедра МТМ
1
к
1
07.11.14.
19
0
20.
Типовой механизм – это простой механизм, имеющий приразличном функциональном назначении широкое применение в
машинах разных видов.
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
20
21.
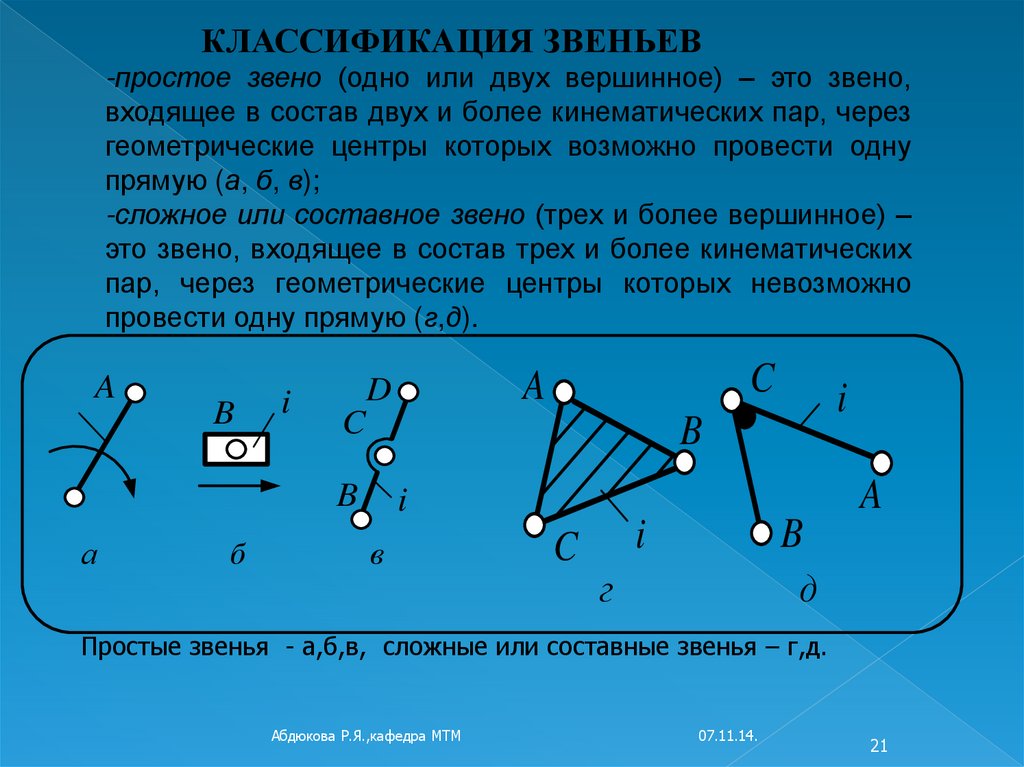
КЛАССИФИКАЦИЯ ЗВЕНЬЕВ-простое звено (одно или двух вершинное) – это звено,
входящее в состав двух и более кинематических пар, через
геометрические центры которых возможно провести одну
прямую (а, б, в);
-сложное или составное звено (трех и более вершинное) –
это звено, входящее в состав трех и более кинематических
пар, через геометрические центры которых невозможно
провести одну прямую (г,д).
A
B
i
C
б
i
B
B
а
C
A
D
A
i
в
C
B
i
г
д
Простые звенья - а,б,в, сложные или составные звенья – г,д.
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
21
22.
по служебному назначению звенья классифицируются:-входное или ведущее звено – это звено
механизма, которому сообщается заданное
движение и соответствующие силовые факторы
(силы и моменты пар сил);
-выходное звено – это звено механизма, на котором
получают требуемое движение и требуемые
силовые факторы;
-промежуточное звено – это звено механизма,
расположенное между входным и выходным
звеньями и предназначенное для передачи
движения и преобразования силовых факторов.
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
22
23.
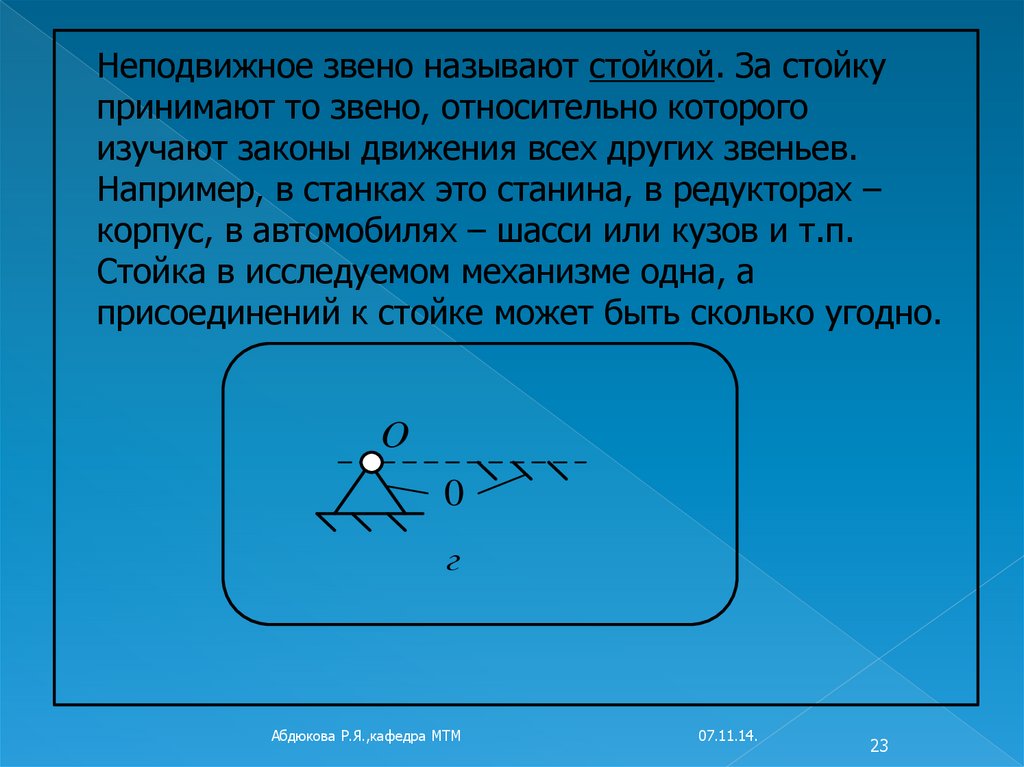
Неподвижное звено называют стойкой. За стойкупринимают то звено, относительно которого
изучают законы движения всех других звеньев.
Например, в станках это станина, в редукторах –
корпус, в автомобилях – шасси или кузов и т.п.
Стойка в исследуемом механизме одна, а
присоединений к стойке может быть сколько угодно.
O
0
г
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
23
24.
КИНЕМАТИЧЕСКАЯ ПАРА1. Соединение 2-х звеньев
2. Относительное движение звеньев.
Звено 1
Вращательная кинематическая пара
Звено 2
Две подвижно соединенные детали
образуют кинематическую пару.
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
24
25.
Кинематические пары классифицируются1) по относительному движению звеньев:
вращательные; поступательные, винтовые,
плоскостные, сферические
2) по виду контакта звеньев:
• низшие кинематические пары – это
кинематические пары, в которых контакт
звеньев их образующих осуществляется
по плоскости или по поверхности
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
25
26.
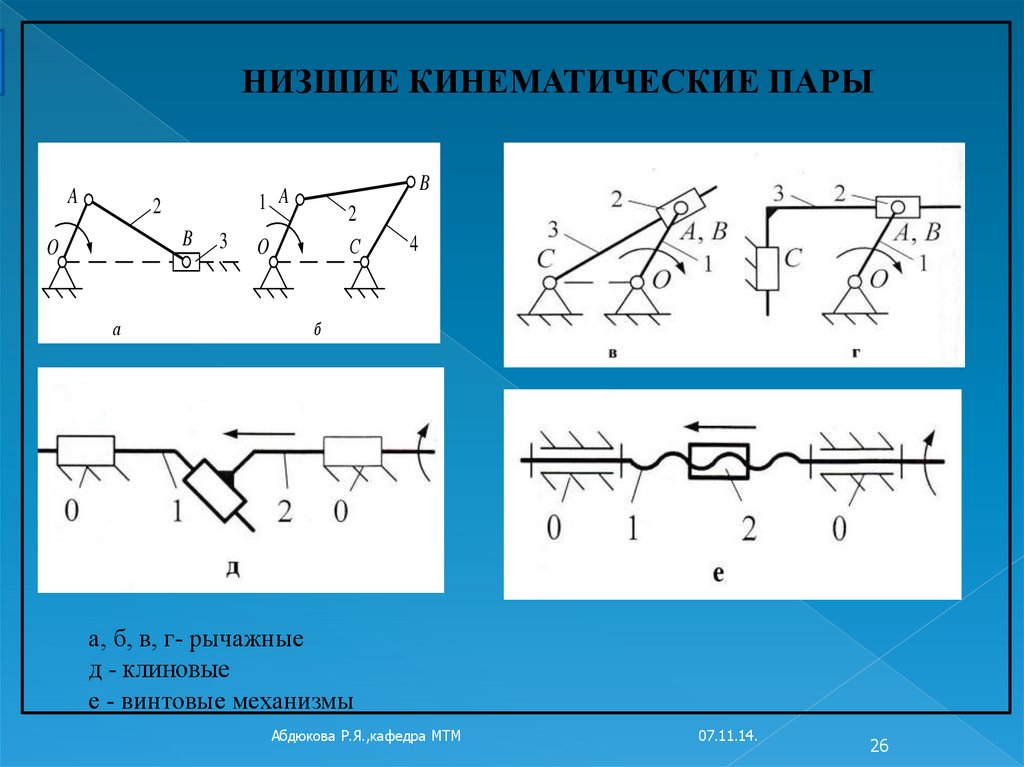
НИЗШИЕ КИНЕМАТИЧЕСКИЕ ПАРЫA
2
B
O
а
B
1 A
3
2
С
O
4
б
а, б, в, г- рычажные
д - клиновые
е - винтовые механизмы
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
26
27.
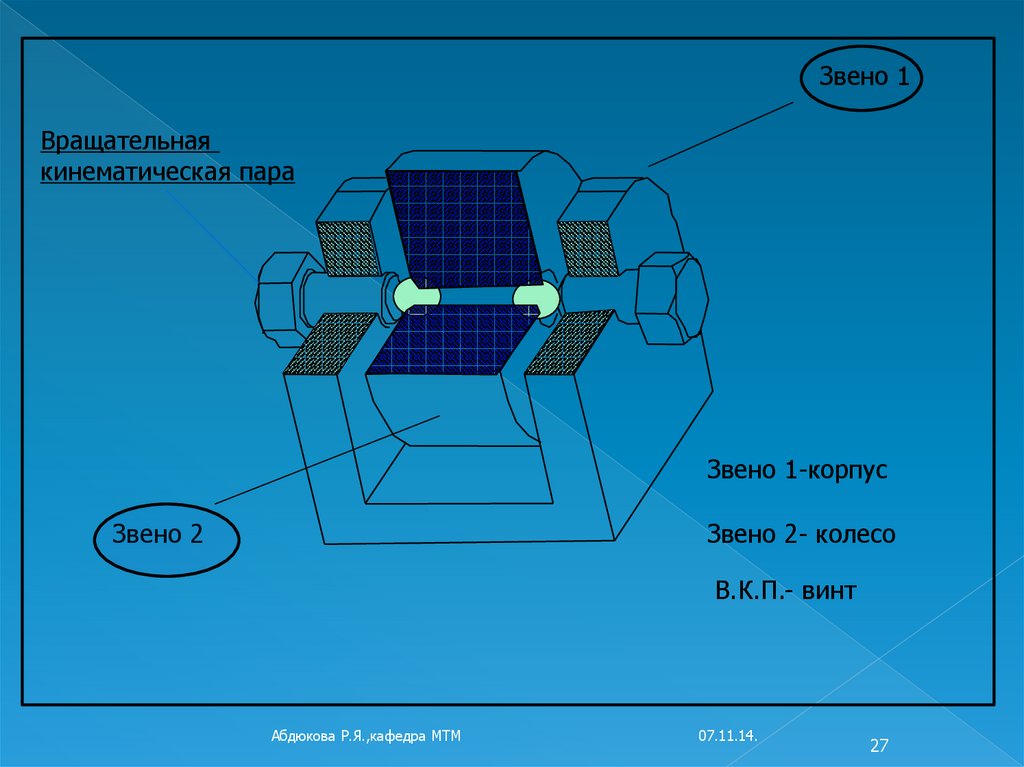
Звено 1Вращательная
кинематическая пара
Звено 1-корпус
Звено 2
Звено 2- колесо
В.К.П.- винт
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
27
28.
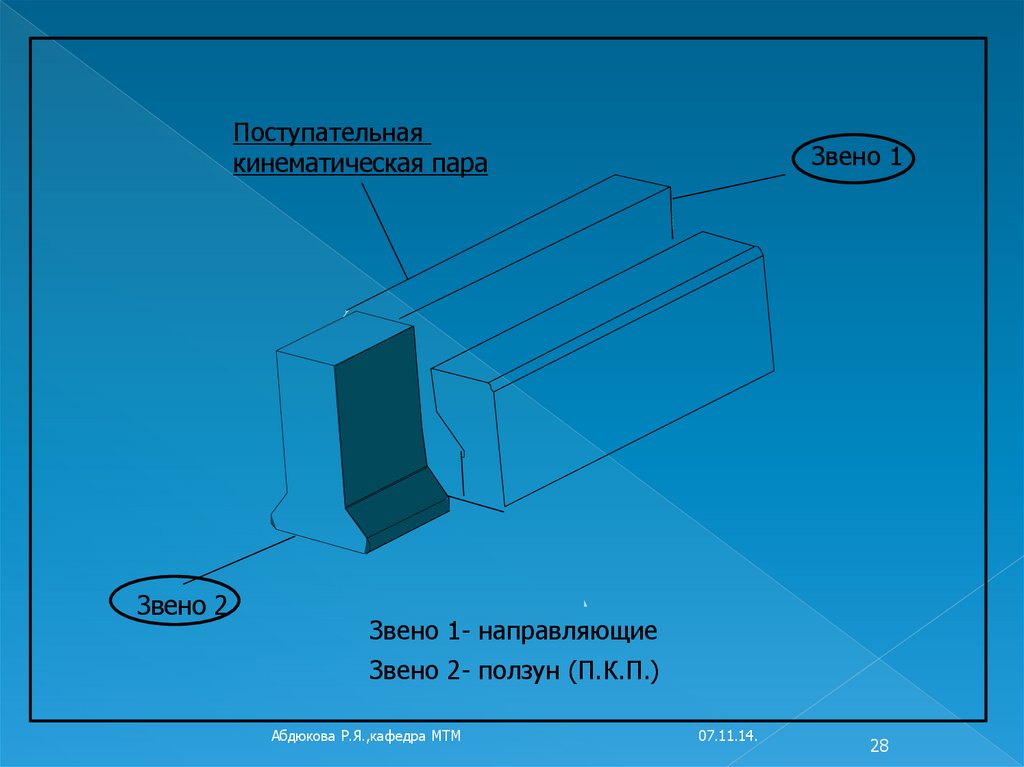
Поступательнаякинематическая пара
Звено 2
Звено 1
Звено 1- направляющие
Звено 2- ползун (П.К.П.)
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
28
29.
Поступательная кинематическая параЦилиндр и поршень со
штоком .
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
29
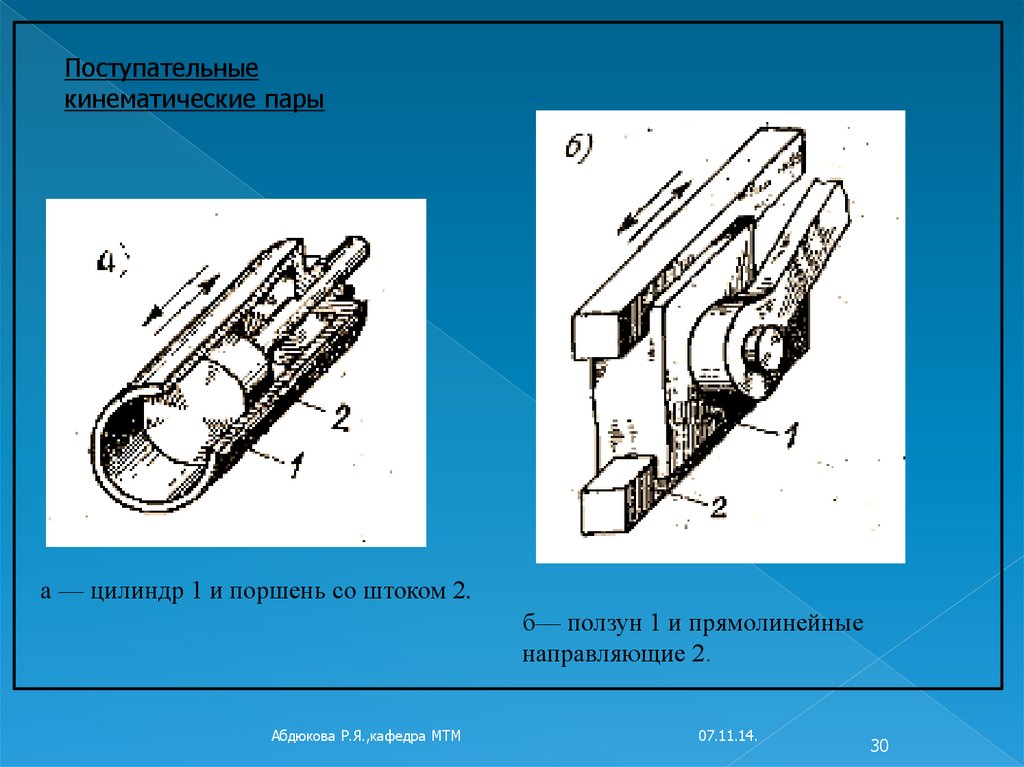
30.
Поступательныекинематические пары
а — цилиндр 1 и поршень со штоком 2.
б— ползун 1 и прямолинейные
направляющие 2.
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
30
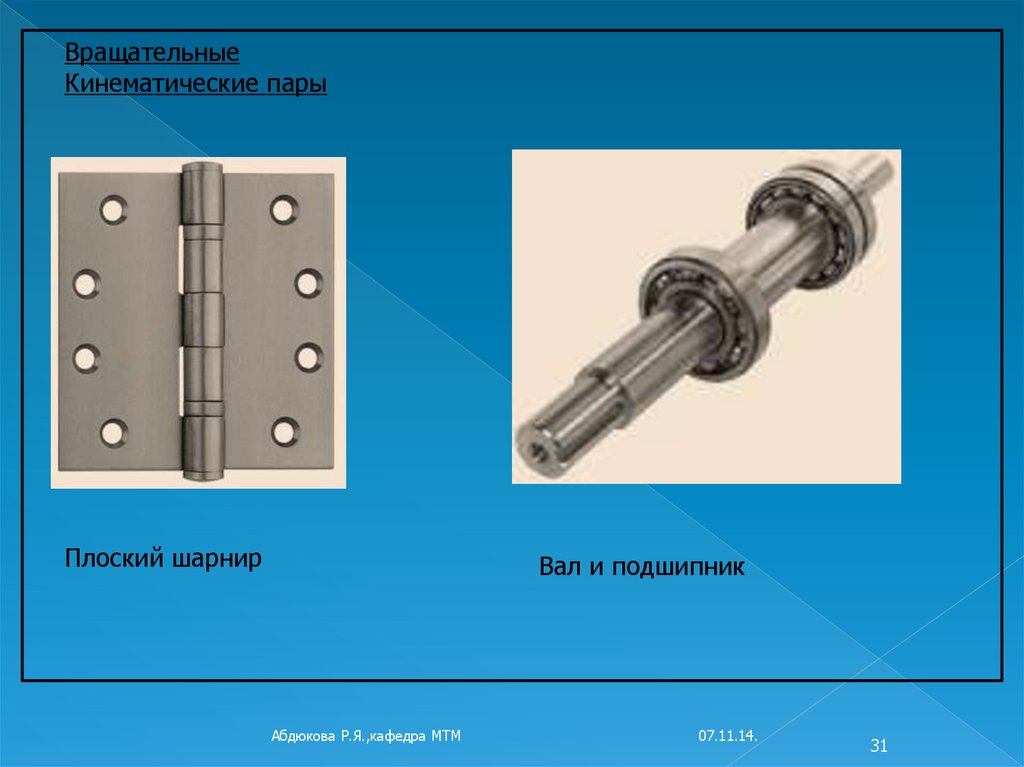
31.
ВращательныеКинематические пары
Плоский шарнир
Вал и подшипник
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
31
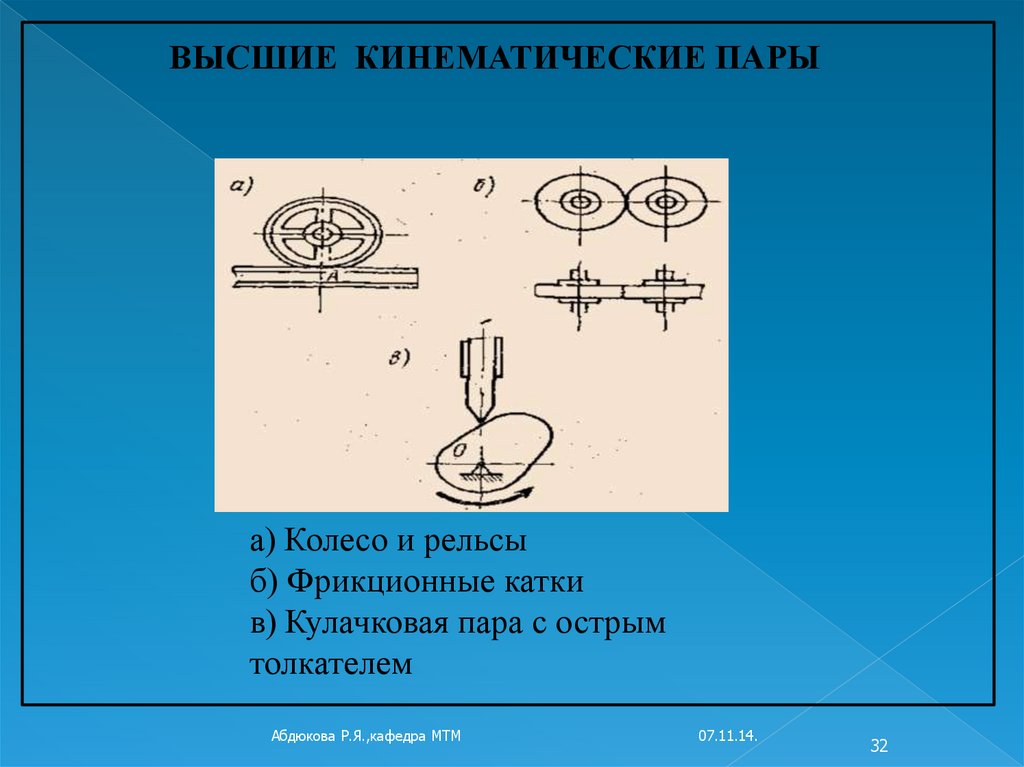
32.
ВЫСШИЕ КИНЕМАТИЧЕСКИЕ ПАРЫа) Колесо и рельсы
б) Фрикционные катки
в) Кулачковая пара с острым
толкателем
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
32
33.
Колесо и рельсыАбдюкова Р.Я.,кафедра МТМ
Фрикционные катки
07.11.14.
33
34.
кулачковая пара с толкателемАбдюкова Р.Я.,кафедра МТМ
07.11.14.
34
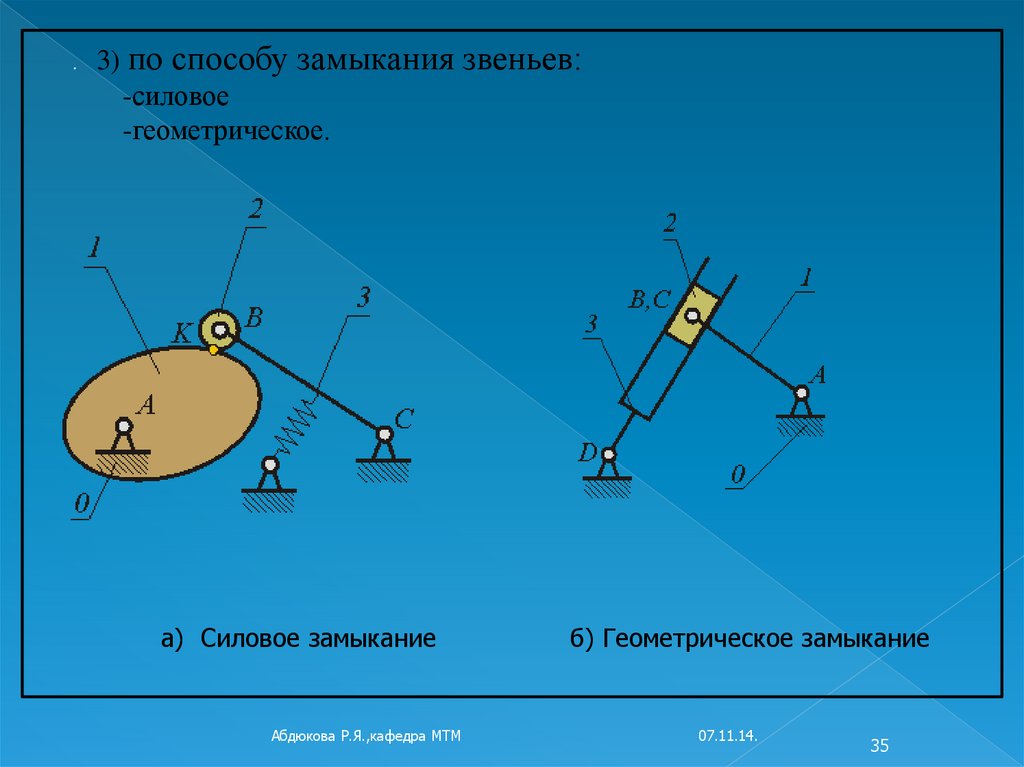
35.
.3) по способу замыкания звеньев:
-силовое
-геометрическое.
а) Силовое замыкание
Абдюкова Р.Я.,кафедра МТМ
б) Геометрическое замыкание
07.11.14.
35
36.
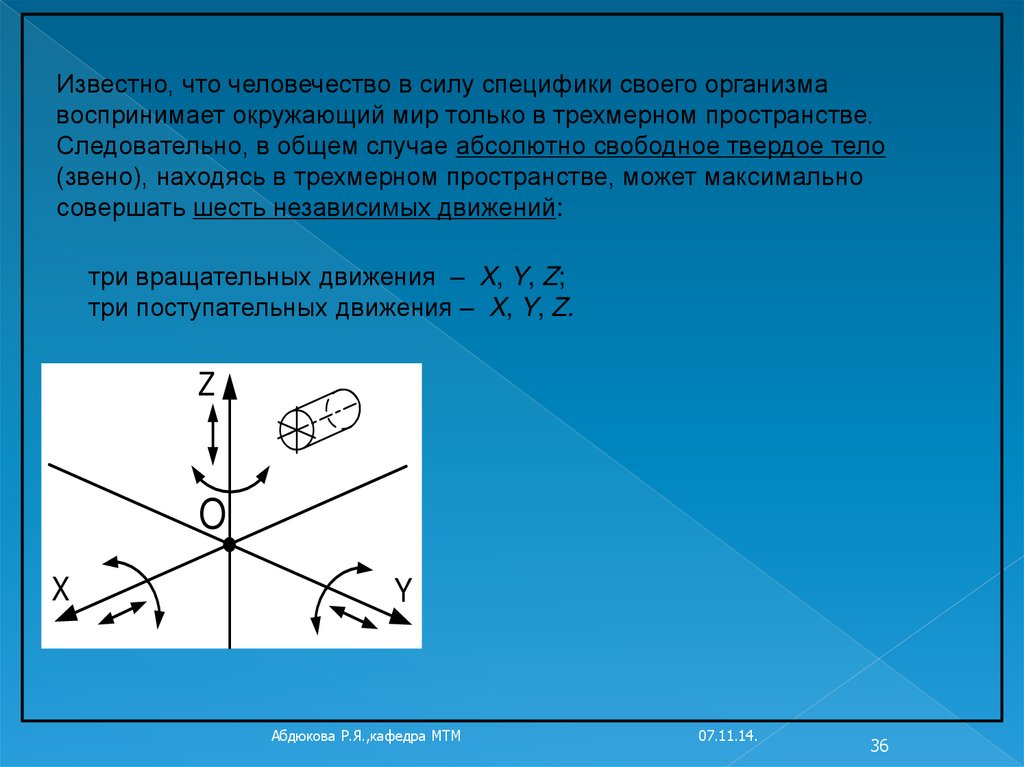
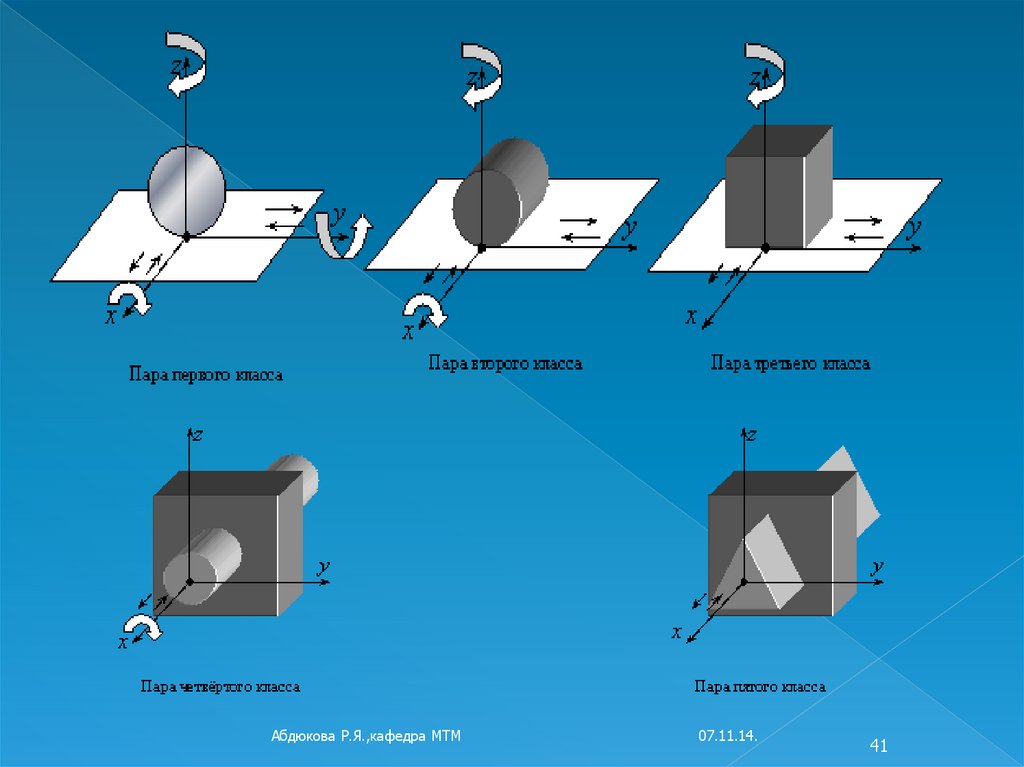
Известно, что человечество в силу специфики своего организмавоспринимает окружающий мир только в трехмерном пространстве.
Следовательно, в общем случае абсолютно свободное твердое тело
(звено), находясь в трехмерном пространстве, может максимально
совершать шесть независимых движений:
три вращательных движения – X, Y, Z;
три поступательных движения – X, Y, Z.
Z
O
X
Y
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
36
37.
Движения звеньев в пространстве или на плоскостиограничиваются конструктивными особенностями
кинематической пары, образованной этими звеньями.
Конструктивные ограничения, наложенные на
перемещения звеньев кинематической пары, называются
условиями связей или связями.
Связи – это ограничения наложенные
на движения звеньев кинематических пар.
.
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
37
38.
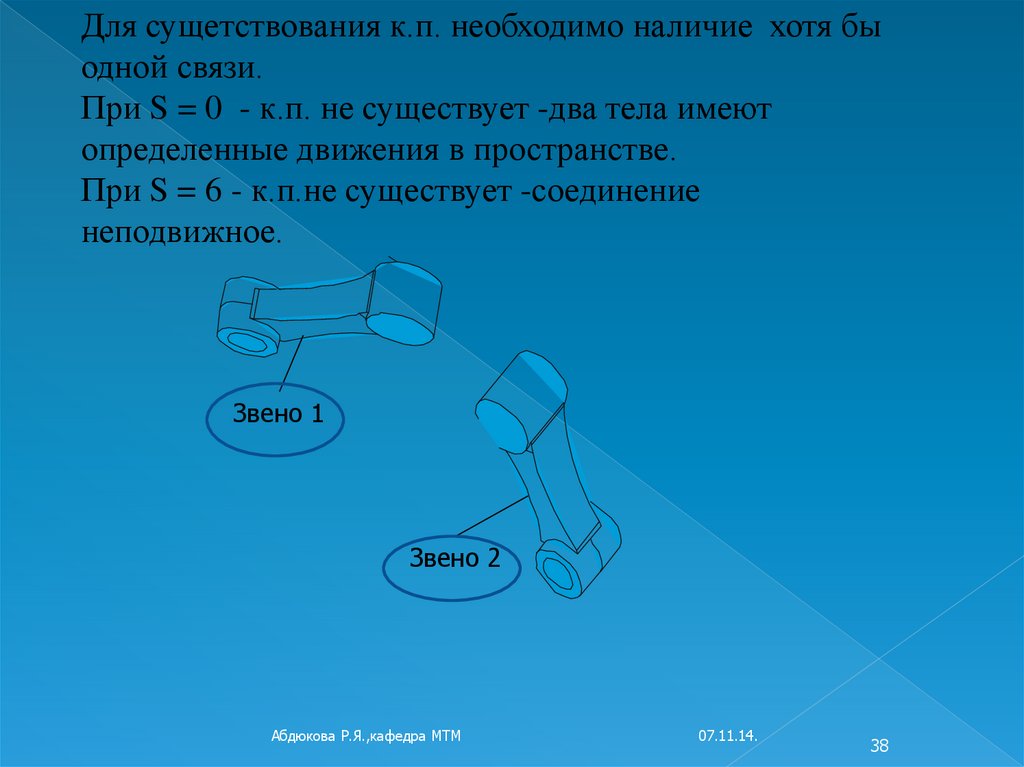
Для сущетствования к.п. необходимо наличие хотя быодной связи.
При S = 0 - к.п. не существует -два тела имеют
определенные движения в пространстве.
При S = 6 - к.п.не существует -соединение
неподвижное.
Звено 1
Звено 2
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
38
39.
H=6–SН- подвижность к.п.
S = 1-5
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
39
40.
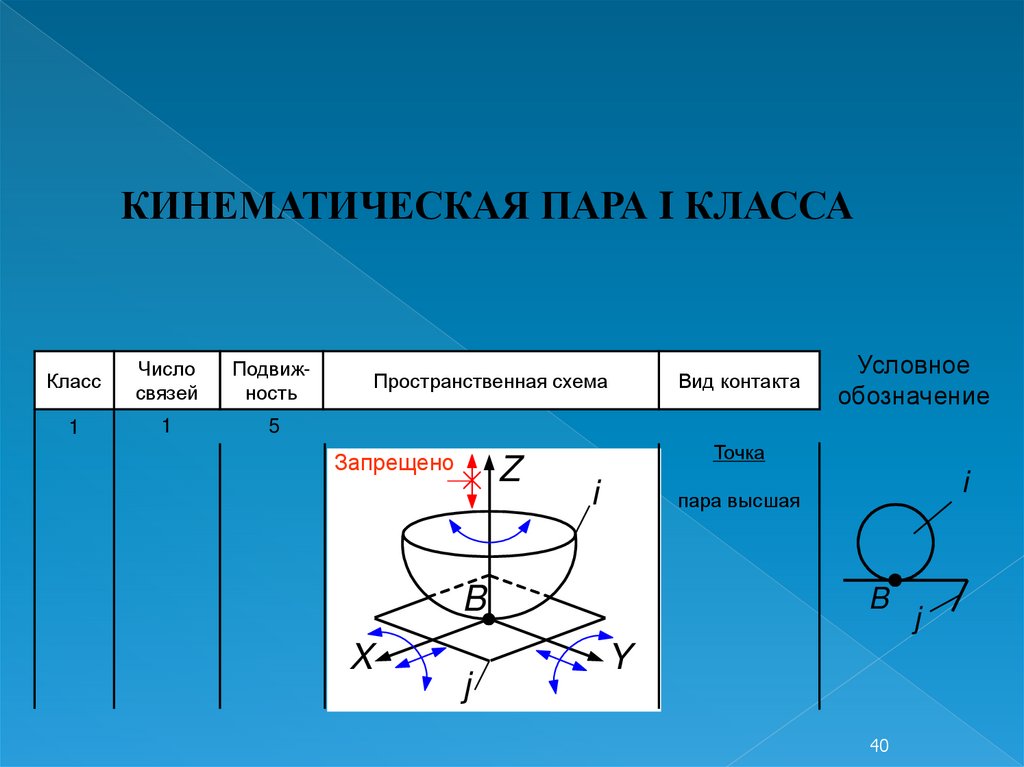
КИНЕМАТИЧЕСКАЯ ПАРА I КЛАССАКласс
Число
связей
Подвижность
1
1
5
Пространственная схема
Запрещено
Z
j
Условное
обозначение
Точка
i
i
пара высшая
B
X
Вид контакта
B
Y
40
j
41.
Абдюкова Р.Я.,кафедра МТМ07.11.14.
41
42.
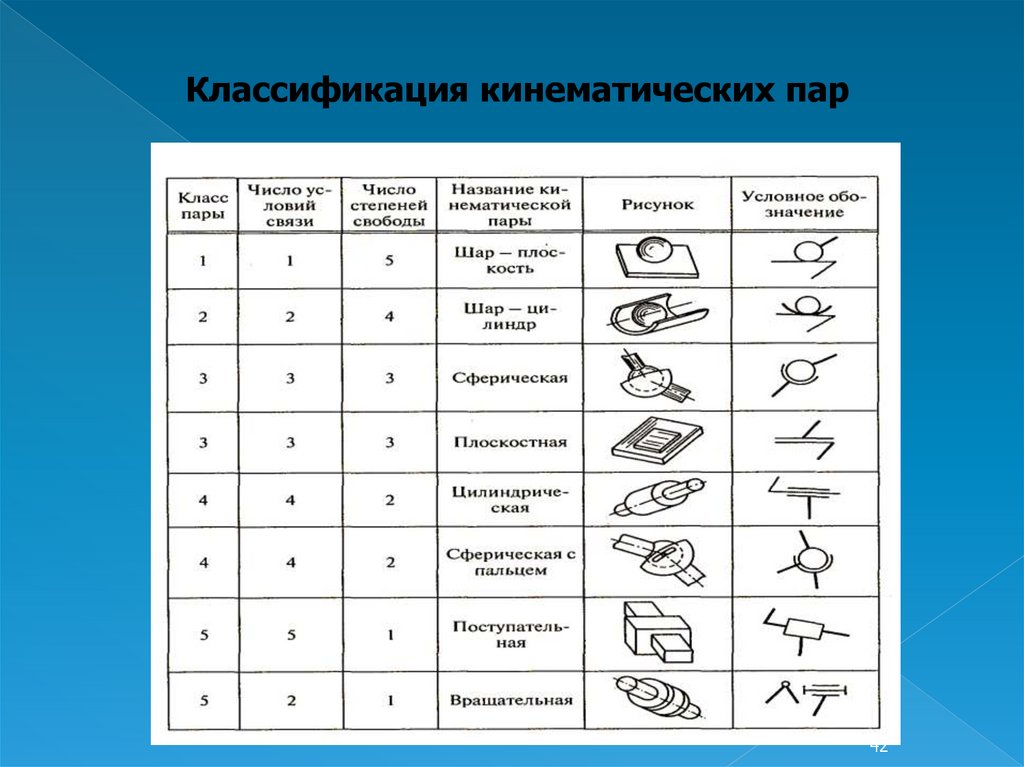
Классификация кинематических пар42
43.
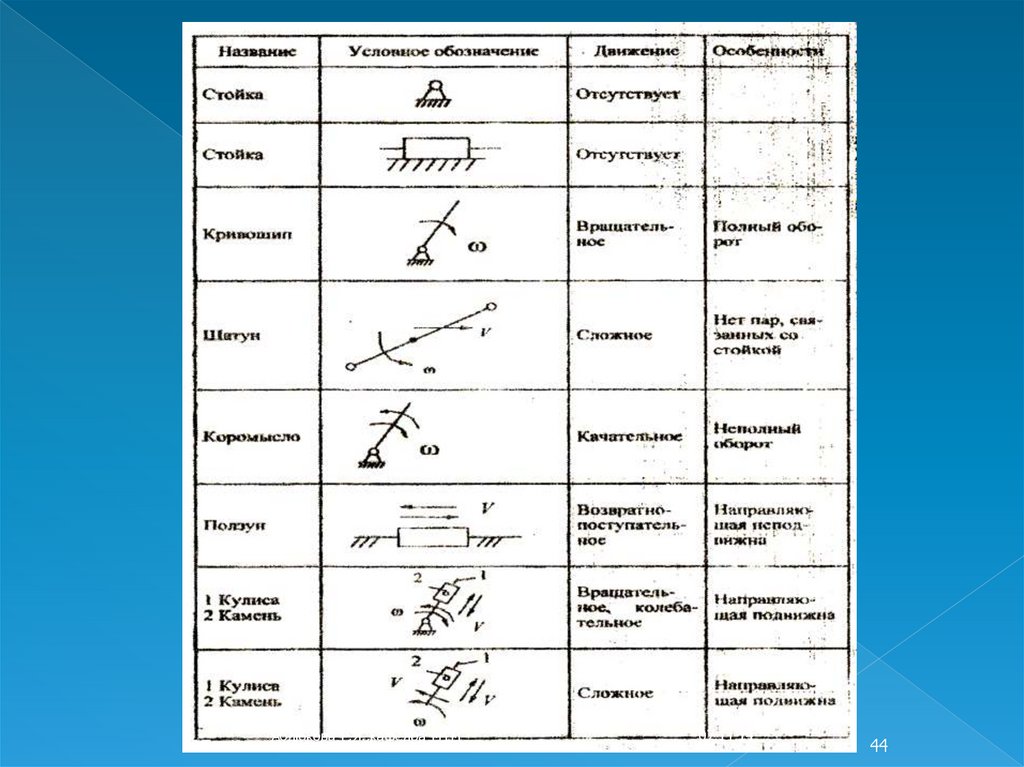
Звенья шарнирно-рычажных механизмовКривошип – вращающееся звено механизма, которое
совершает полный оборот вокруг оси, связанной со стойкой.
Шатун – звено механизма, образующее кинематические
пары только с подвижными звеньями.
Коромысло – звено механизма, которое совершает только
колебательные движения при
неполном вращении вокруг
неподвижной оси, связанной со стойкой.
Кулиса – подвижное звено механизма, являющееся
направляющей для камня.
Ползун – звено, образующее поступательную пару со
стойкой.
Камень – звено, образующее поступательную пару с
кулисой
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
43
44.
Абдюкова Р.Я.,кафедра МТМ07.11.14.
44
45.
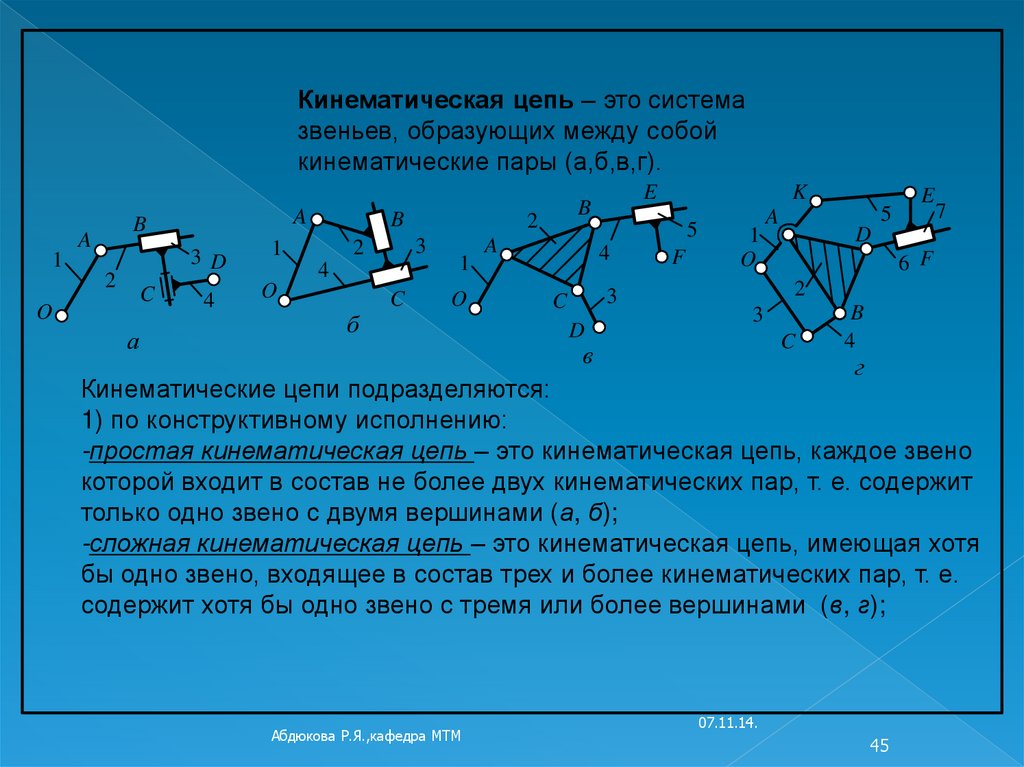
Кинематическая цепь – это системазвеньев, образующих между собой
кинематические пары (а,б,в,г).
A
B
A
3 D
1
2
C
O
а
4
B
4
O
2
3
2
1
C
1
O
б
E
B
K
5
A
4
3
C
D
F
1
O
5
A
E
7
D
6 F
2
3
C
в
B
4
г
Кинематические цепи подразделяются:
1) по конструктивному исполнению:
-простая кинематическая цепь – это кинематическая цепь, каждое звено
которой входит в состав не более двух кинематических пар, т. е. содержит
только одно звено с двумя вершинами (а, б);
-сложная кинематическая цепь – это кинематическая цепь, имеющая хотя
бы одно звено, входящее в состав трех и более кинематических пар, т. е.
содержит хотя бы одно звено с тремя или более вершинами (в, г);
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
45
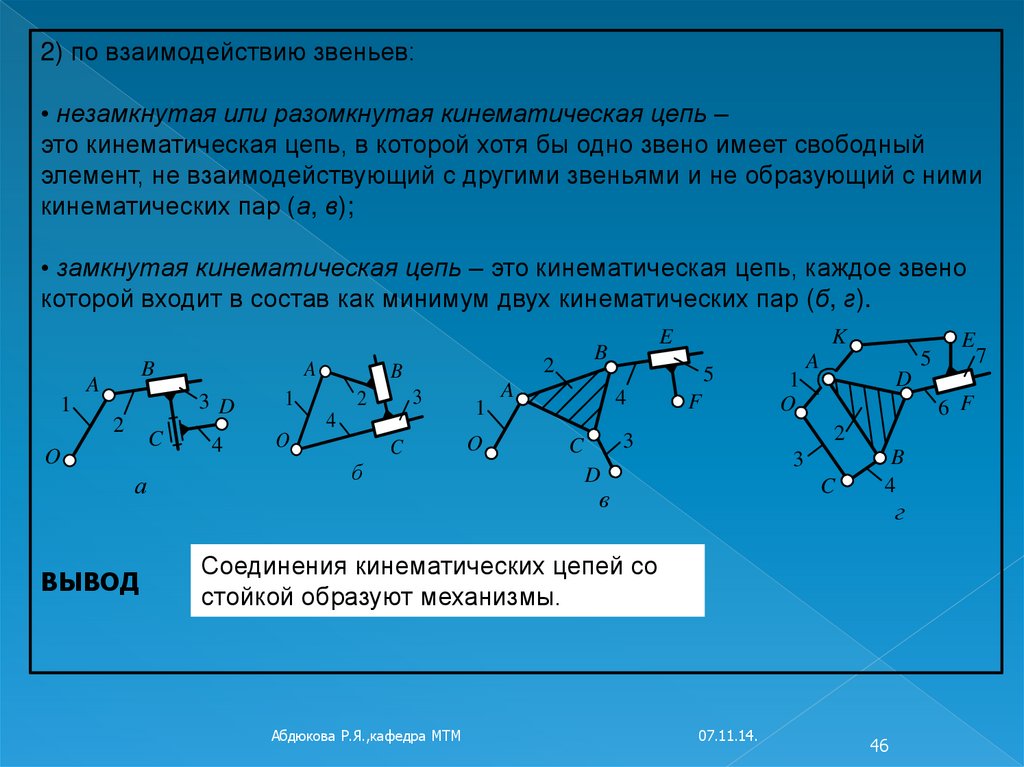
46.
2) по взаимодействию звеньев:• незамкнутая или разомкнутая кинематическая цепь –
это кинематическая цепь, в которой хотя бы одно звено имеет свободный
элемент, не взаимодействующий с другими звеньями и не образующий с ними
кинематических пар (а, в);
• замкнутая кинематическая цепь – это кинематическая цепь, каждое звено
которой входит в состав как минимум двух кинематических пар (б, г).
B
A
A
3 D
1
2
C
O
а
ВЫВОД
4
2
B
3
2
1
4
O
C
б
1
O
E
B
K
5
A
4
F
6 F
3
D
C
в
B
4
г
Соединения кинематических цепей со
стойкой образуют механизмы.
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
E
D
2
3
C
1
O
5
A
46
7
47.
Изучение механизмов начинается с анализа их структуры.Структура механизма – это совокупность звеньев,
образующих подвижные и неподвижные соединения.
Структурная схема – это графическое изображение
механизма, выполненное без соблюдения масштабов с
использованием условных обозначений, рекомендованных
ГОСТом.
Структурная схема механизма содержит информацию о
числе звеньев и виде движений ими совершаемых, о
числе, подвижности и классе кинематических пар, о числе
и виде кинематических цепей.
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
47
48.
СТРУКТУРНЫЙАНАЛИЗ РЫЧАЖНЫХ
МЕХАНИЗМОВ
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
48
49.
Назначение структурного анализа –выявления и устранения дефектов
их структуры.
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
49
50.
Задача структурного анализа1) Анализ структуры механизма
2) Разложение на группы Ассура
3) Определение степени подвижности
механизма.
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
50
51.
Для решения задач анализа и синтезарычажных механизмов профессором Л. В.
Ассуром была предложена структурная
классификация, согласно которой механизмы,
состоят из первичных (элементарных)
механизмов и структурных групп.
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
51
52.
Степень подвижности механизма – это числонезависимых обобщенных координат
определяющих положения звеньев механизма на
плоскости в рассматриваемый момент времени.
Степень подвижность механизма - W
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
52
53.
Структурная формула П.Л.Чебышевадля плоских механизмов
W = 3n- 2p5 - р4
n - число подвижных звеньев,
р5 - число кинематических пар 5-го
класса,
р4 - число кинематических пар 4-ого
класса.
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
53
54.
Структурный синтезМеханизм = ПМ + СГ ….+СГ.
Структурный анализ
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
54
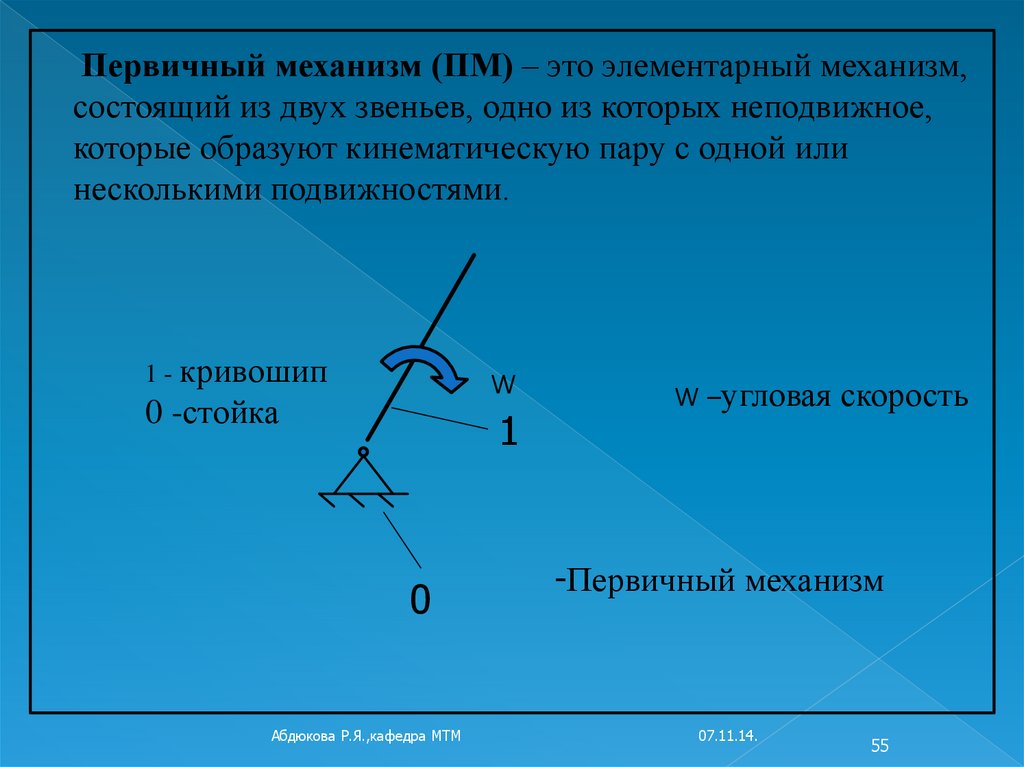
55.
Первичный механизм (ПМ) – это элементарный механизм,состоящий из двух звеньев, одно из которых неподвижное,
которые образуют кинематическую пару с одной или
несколькими подвижностями.
1 - кривошип
W
0 -стойка
1
0
Абдюкова Р.Я.,кафедра МТМ
W –угловая
скорость
-Первичный механизм
07.11.14.
55
56.
Структурная группа звеньев (СГ) – это кинематическаяцепь, образованная подвижными звеньями, подвижность
которой равна нулю в любой момент времени.
Структурная классификация по Ассуру представляет
собой плоские рычажные механизмы с вращательными
кинематическими парами.
56
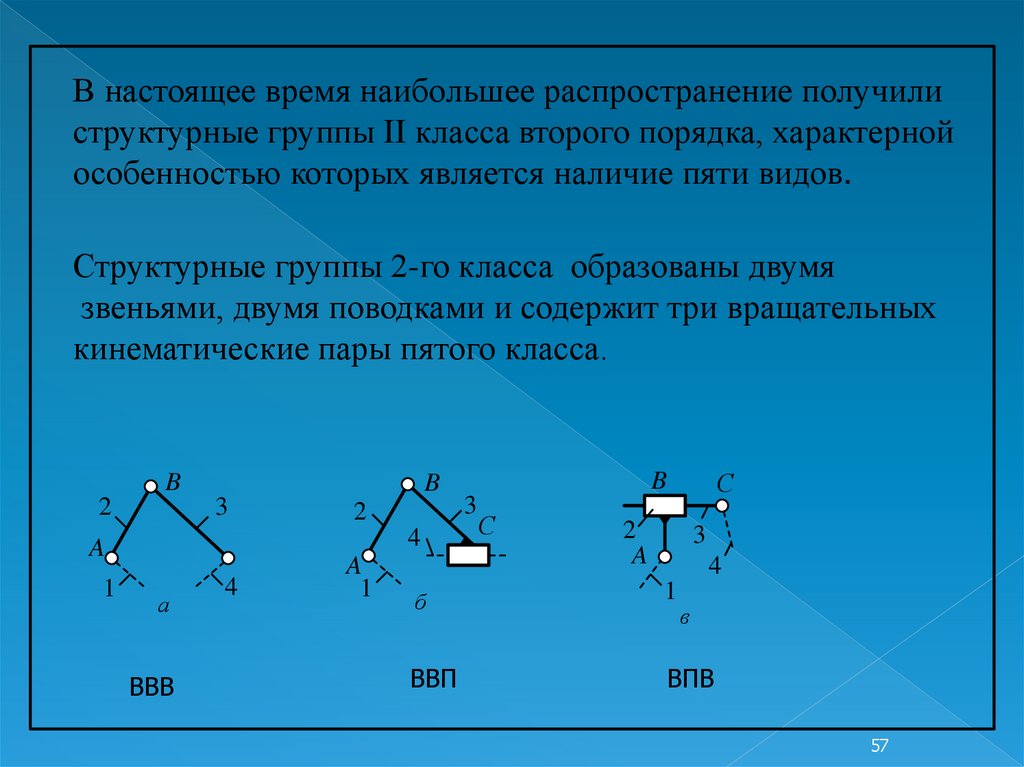
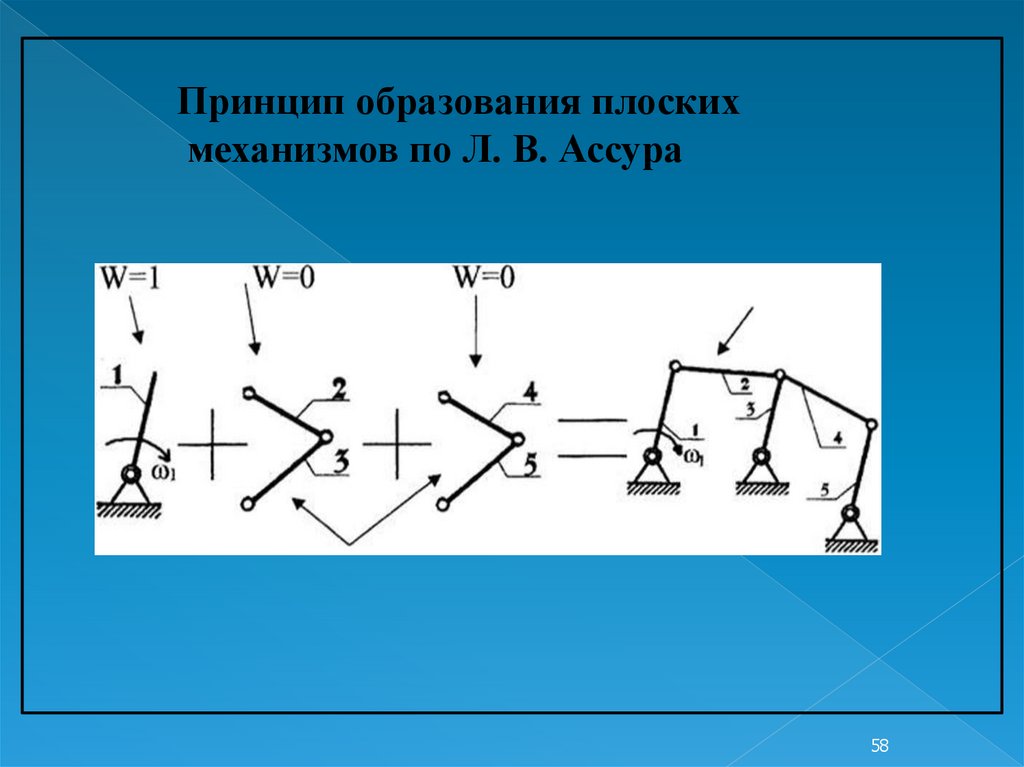
57.
В настоящее время наибольшее распространение получилиструктурные группы II класса второго порядка, характерной
особенностью которых является наличие пяти видов.
Структурные группы 2-го класса образованы двумя
звеньями, двумя поводками и содержит три вращательных
кинематические пары пятого класса.
B
2
B
3
4
A
1
2
а
ВВВ
4
A
1
С
B
3
С
2
A
3
4
б
1
ВВП
ВПВ
в
57
58.
Принцип образования плоскихмеханизмов по Л. В. Ассура
58
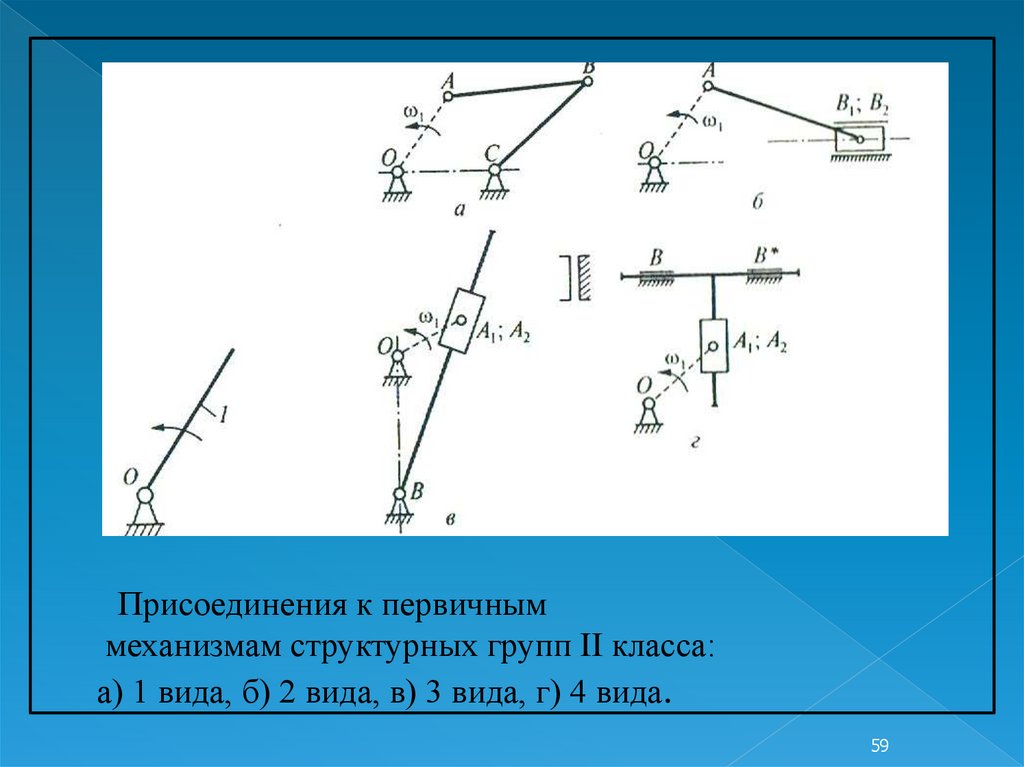
59.
Присоединения к первичныммеханизмам структурных групп II класса:
а) 1 вида, б) 2 вида, в) 3 вида, г) 4 вида.
59
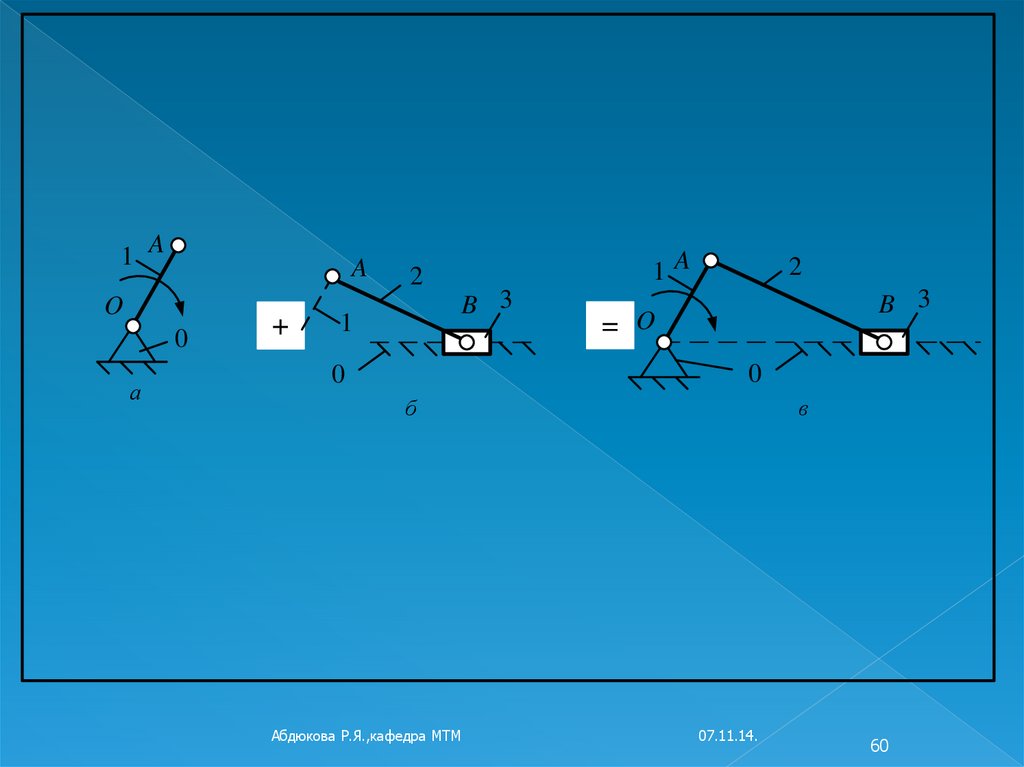
60.
1 AA
O
0
а
+
2
1
1A
B 3
2
B 3
= O
0
0
в
б
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
60
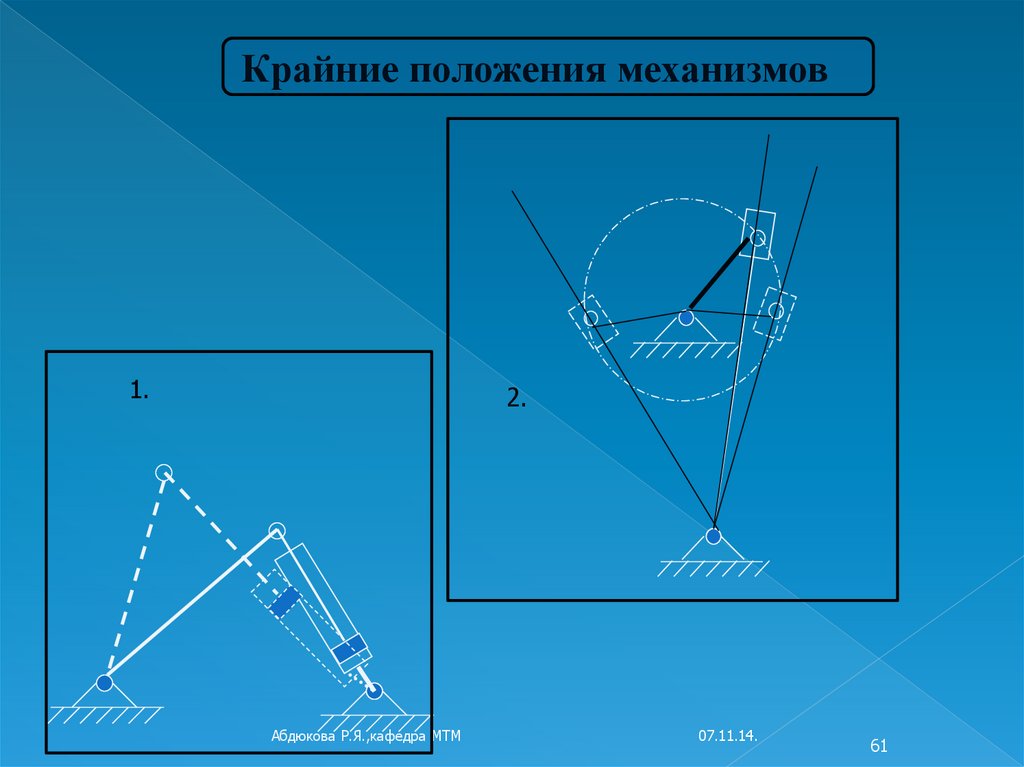
61.
Крайние положения механизмов1.
2.
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
61
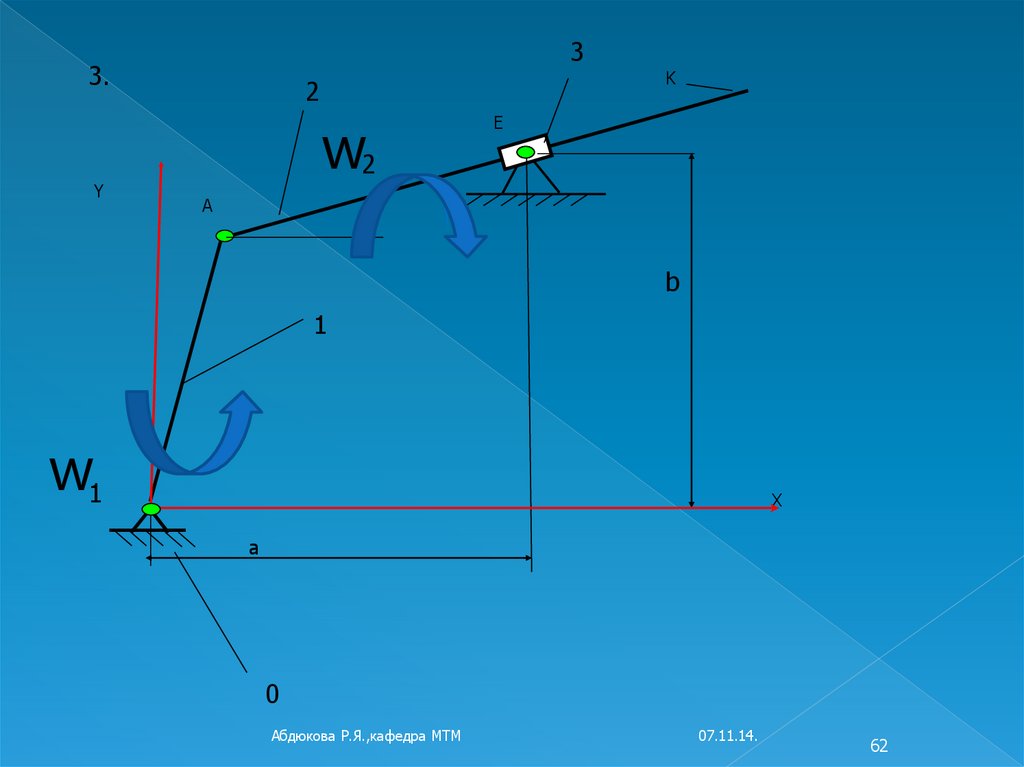
62.
33.
Y
2
K
w2
E
A
b
1
w1
X
a
0
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
62
63.
План положений глубинного насоса.Для выбора допустимых соотношений расстояний между
осями шарниров, обеспечивающих работоспособность механизма
при полном обороте кривошипа, начертить механизм при 8 его
положениях.
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
63
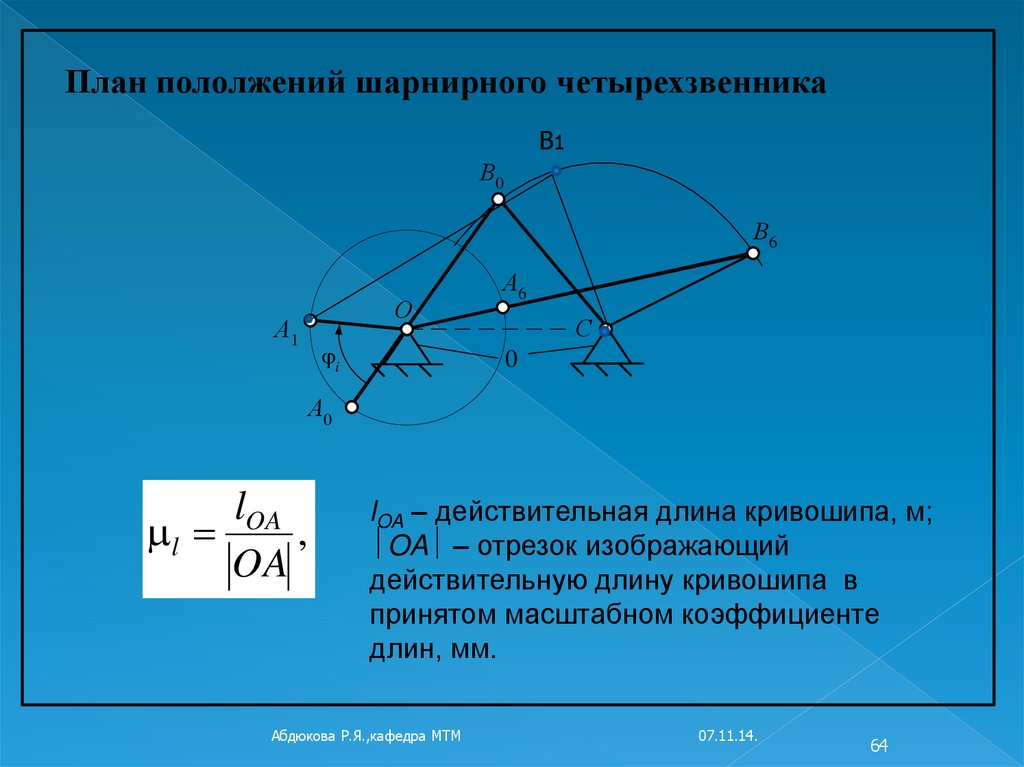
64.
План пололжений шарнирного четырехзвенникаВ1
В0
В6
А1
О
i
А6
С
0
А0
lOA
l
,
OA
lOA – действительная длина кривошипа, м;
OA – отрезок изображающий
действительную длину кривошипа в
принятом масштабном коэффициенте
длин, мм.
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
64
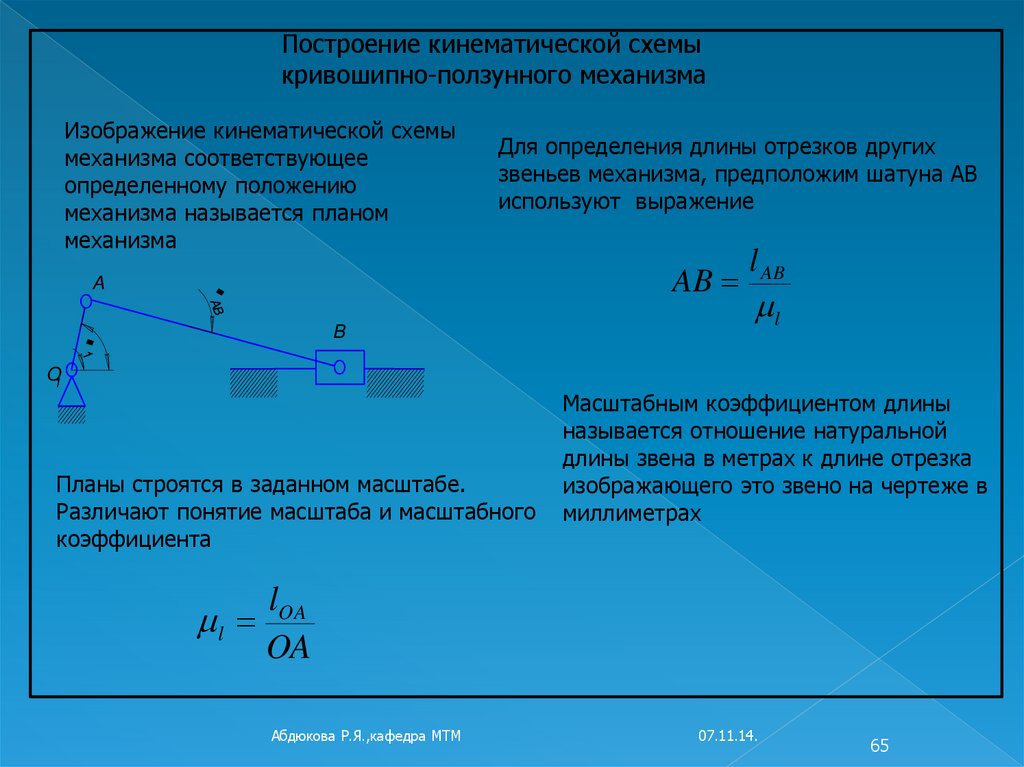
65.
Построение кинематической схемыкривошипно-ползунного механизма
Изображение кинематической схемы
механизма соответствующее
определенному положению
механизма называется планом
механизма
Для определения длины отрезков других
звеньев механизма, предположим шатуна АВ
используют выражение
AB
A
B
O1
Планы строятся в заданном масштабе.
Различают понятие масштаба и масштабного
коэффициента
l
l AB
l
Масштабным коэффициентом длины
называется отношение натуральной
длины звена в метрах к длине отрезка
изображающего это звено на чертеже в
миллиметрах
lOA
OA
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
65
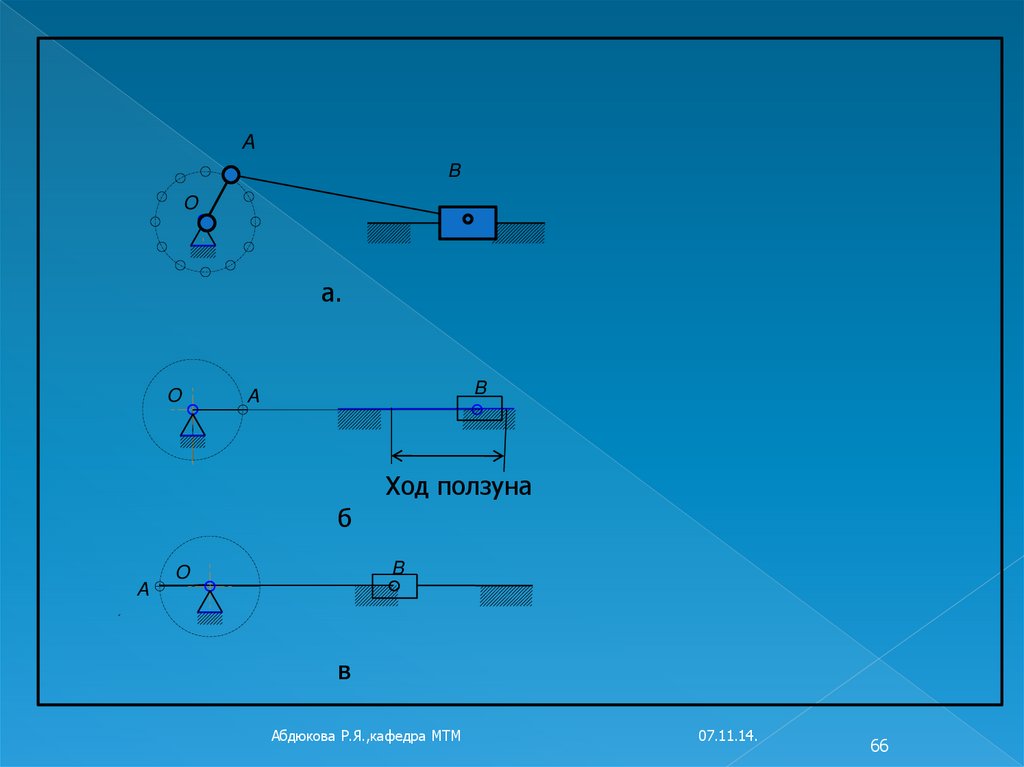
66.
AB
O
а.
O
B
A
Ход ползуна
б
A
B
O
в
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
66
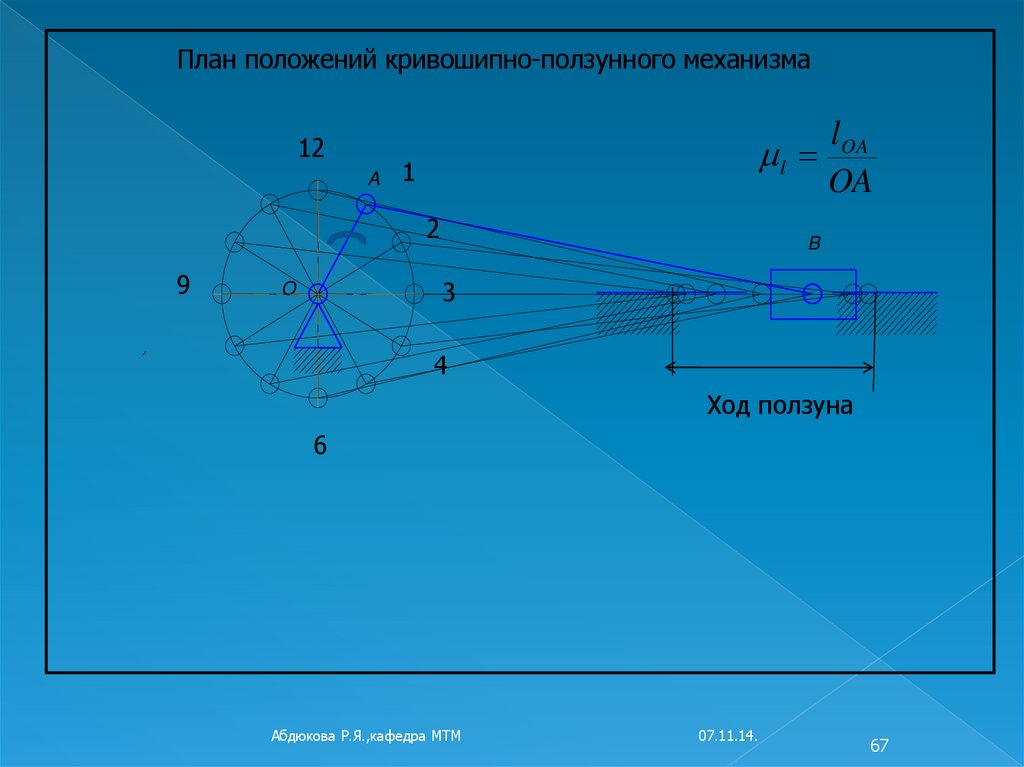
67.
План положений кривошипно-ползунного механизма12
A
lOA
l
OA
1
2
9
B
3
O
4
Ход ползуна
6
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
67
68.
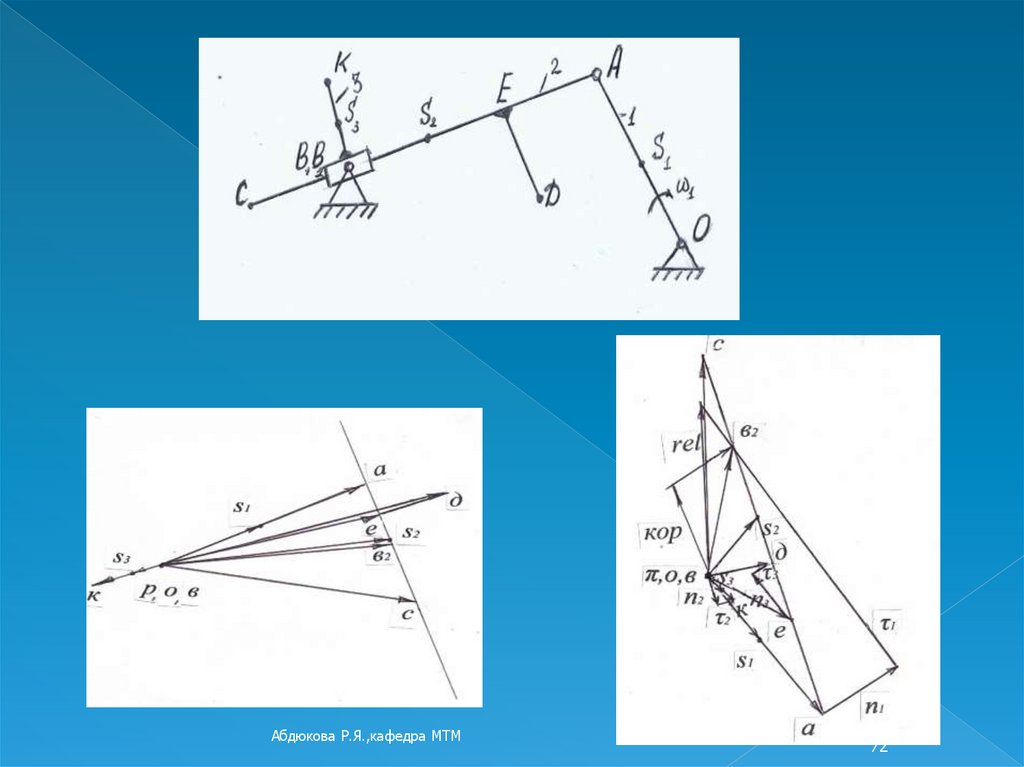
Метод планов скоростей иускорений
Основан на графическом решении векторных уравнений
распределения величин скоростей и ускорений между
характерными точками механизма.
Векторные уравнения составляются по структурным
группам.
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
68
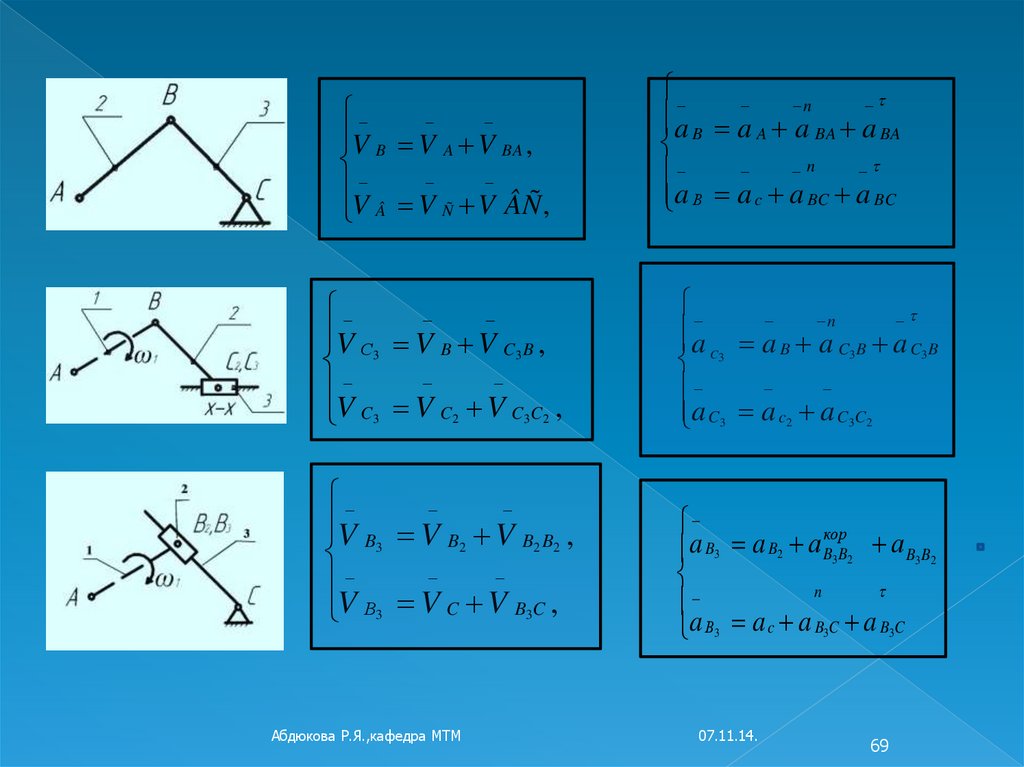
69.
V B V A V BA ,V Â V Ñ V ÂÑ ,
V С3 V B V C3 B ,
V C3 V C2 V C3C2 ,
V B3 V B2 V B2 B2 ,
V В3 V C V B3C ,
Абдюкова Р.Я.,кафедра МТМ
n
a B a A a BA a BA
n
a В a c a BC a BC
n
a a B a C B a C B
3
3
C3
a C3 a c2 a C3C2
кор
a
a
а
B
B
2
B3 B2 а B3 B2
3
n
a В3 a c a B3C a B3C
07.11.14.
69
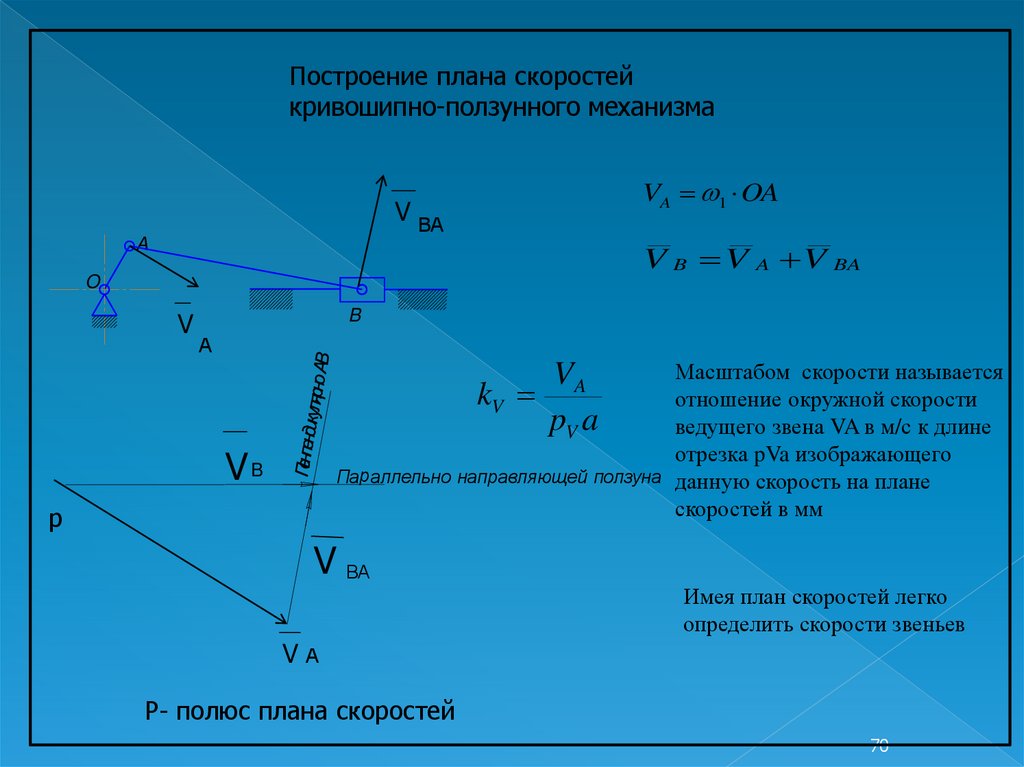
70.
Построение плана скоростейкривошипно-ползунного механизма
VA 1 OA
V ВА
A
V B V A V BA
O
V
B
А
Масштабом скорости называется
отношение окружной скорости
ведущего звена VA в м/с к длине
отрезка pVa изображающего
Параллельно направляющей ползуна данную скорость на плане
скоростей в мм
VA
kV
pV a
VB
р
V ВА
Имея план скоростей легко
определить скорости звеньев
VА
Р- полюс плана скоростей
70
71.
Планом скоростей (ускорений) механизма называютчертеж, построенный в масштабе µа (µv), на
котором скорости (ускорения) различных точек
изображены в виде векторов показывающих
направления и величины этих скоростей
(ускорений) в данный момент времени.
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
71
72.
Абдюкова Р.Я.,кафедра МТМ07.11.14.
72
73.
Свойства плана скоростей1.
2.
3.
4.
5.
Отрезки плана скоростей, проходящие через полюс, изображают
абсолютные скорости. Направление абсолютных скоростей всегда
получается от полюса. В конце векторов абсолютных скоростей принято
ставить малую букву той буквы, которой обозначается соответствующая
точка на плане механизма;
Отрезки плана скоростей , не проходящие через полюс , обозначают
относительные скорости;
Концы векторов абсолютных скоростей точек механизма жестко
связанных между собой, на плане скоростей образуют фигуры, подобные
сходственно расположенные и повернутые на 90 градусов относительно
фигур, образуемых этими точками на плане механизма
Неподвижные точки механизма имеют соответствующие им точки на
плане скоростей расположенные в полюсе
План скоростей дает возможность находить нормали и касательные к
траектории точки без построения самих траекторий
Абдюкова Р.Я.,кафедра МТМ
07.11.14.
73