

 software
softwareSimilar presentations:










Анализ компьютерных средств на этапе проектирования СУ
1.
Анализ компьютерных средствНа
этапе
проектирования
СУ
возможные
решения
обычно
оцениваются на основании интуиции и предыдущего опыта. Однако в
настоящее время, как правило, требуется инструментарий, позволяющий
автоматизировать процесс принятия решений.
Для моделирования СУ используются различные программные
продукты:
специализированные
математические
системы
пакеты;
программирования.
библиотеки
Хорошо
программ;
разработаны
методики и алгоритмы, позволяющие исследовать режимы работы
сложных СУ; анализировать их качество, рассчитывать частотные
характеристики
и
импульсные
переходные
функции;
исследовать
динамику сложных систем, содержащих элементы с нелинейными
характеристиками; рассчитывать оптимальные процессы при наличии
ограничений; исследовать динамику стохастических систем, и т. д.
2.
При выборе того или иного программного продукта необходимоучитывать следующее:
− вид математического описания исследуемой
электромеханической системы;
− особенности представления данных модели;
− каким порядком дифференциальных уравнений, или каким
порядком и видом матрицы (симметричная, избыточная, вырожденная и т.
д.), или каким количеством структурных элементов графа описывается
электромеханическая система;
− вид представления результатов расчета;
− количество и вид нелинейных характеристик, описывающих
управляющие и возмущающие воздействия;
− возможность гибкого изменения математической модели;
− технологию функционирования математического ядра
моделирующей программы.
3.
В настоящее время в основе существующих функциональноориентированных
методологии
методов,
направленных
программирования,
лежит
на
процесс
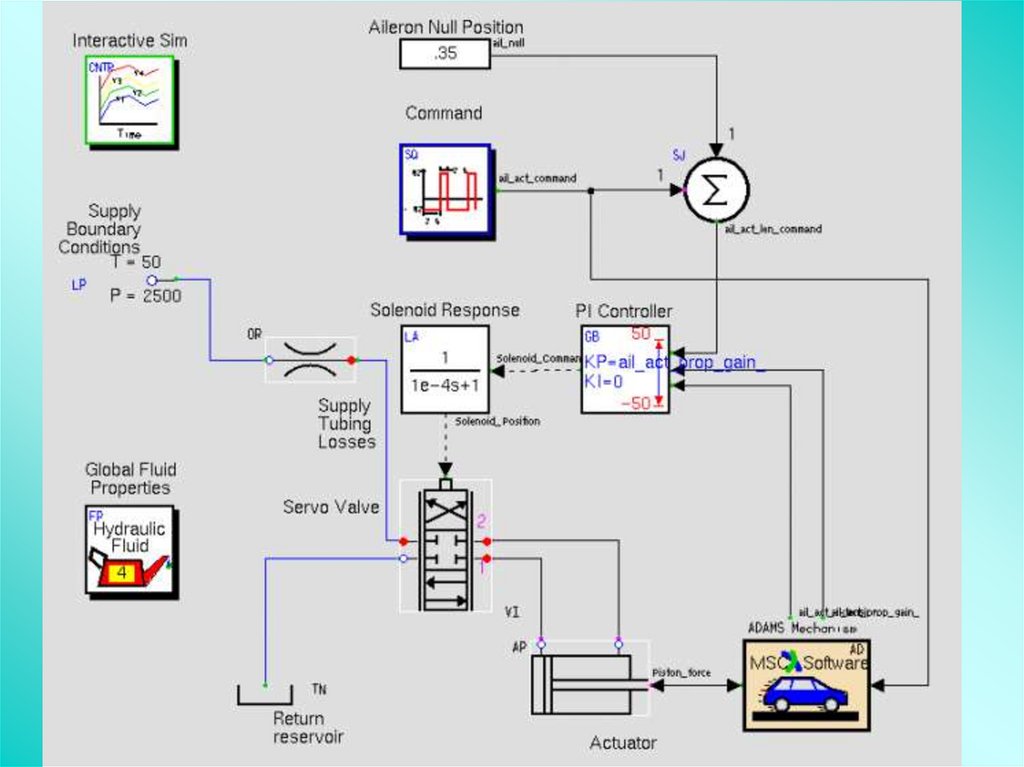
совершенствование
целенаправленного
расчленения реализуемых моделей на составные, более простые части –
декомпозиция модели. Декомпозиция может быть как функциональной, так
и по структуре данных.
К
категории
функционально
ориентированных
методов
программирования относятся следующие: усовершенствованная методика
программирования (IPT) фирмы «IBM»; метод структурного анализа и
проектирования (SADT) фирмы «Софтек» (США); метод анализа и
структурного программирования (MAPS) фирмы «Ефрософт» (США);
методология метадетализации (MSR); составное проектирование Майерса
и структурное проектирование Констайна и Йордана и отечественные: Ртехнологии И. В. Вельбицкого и Прометей-технологии В. В. Липаева.
4.
Усовершенствованная методика программирования (IPT) являетсянаиболее перспективным подходом к усовершенствованию методологии и
технологии программирования с точки зрения практического внедрения. В
основе этой методики лежат теоретические и методологические концепции
структурного программирования, проектирования методом «сверху –
вниз», метода HIPO и библиотеки обеспечения разработки.
5.
Для моделирования СУ применяют следующие программныесредства: MATLAB («MathWorks, Inc»), GPSS (компания «Minuteman
Software» (США)), SCILAB, MATHCAD («Mathsoft, Inc»), DERIVE («Soft
Warehouse»), SystemBuild (MATRIXx), Anylogic (Model Vision Studium),
VisSim, MBTY, Easy5S, Dynast, 20-sim, Dymola, Simplorer, ITI-sim, Pspice,
Multisim, Micro-Cap и др., системы Modelica, CADA (Supervisory Control And
Data Acquisition – диспетчерское управление и сбор данных) или DCS
(Distributed Control Systems – распределённая система управления),
реализующие в том числе и функции схематичного отображения
технологических процессов, а также Case-средства (Computer-Aided
Software/System Engineering) и др.
6.
Math Works MATLAB Simulink, VisSim, MBTY, Easy5S относятся кпрограммам с поточной моделью управления (модель программирования,
в которой инструкции, процедуры или функции выполняются только тогда,
когда все входные данные (т. е. параметры и аргументы) готовы). Эти
программы легко интегрируются с системами сбора данных, благодаря
чему возможно создание (компьютерных) моделей с физическими
объектами в контуре. В большинстве из них возможно программирование
цифровых
меняться
сигнальных
в
процессоров.
процессе
событийному управлению.
симуляции
Структура
без
затрат
их
моделей
времени,
может
согласно
7.
Dynast, 20-sim, Dymola, Simplorer, ITI-sim, Pspice, Multisim, MicroCap относятся к программам – интерпретаторам систем уравнений. Этипрограммы, в скрытом от пользователя режиме, легко преобразуют
текстовую запись систем уравнений к требуемому решателям виду. Эти
особенности технологии позволили не ограничиваться моделями в виде
передаточных функций, и, временно, эти программы заняли лидирующие
позиции в области мультидоменного моделирования.
8.
Недостатки первой группы моделирующих программ связаны сдостоинствами второй, и наоборот. Существует технология построения
моделей элементов физических устройств с помощью бинаправленных
(ненаправленных) графов связи, которая дает шанс программам первой
группы однозначно занять лидирующую позицию.
Modelica
–
свободно
распространяемый
объектно-
ориентированный язык для моделирования сложных физических систем.
Modelica
обеспечивает
возможность
создания
широкого
диапазона
моделей различных типов: механических, электрических, гидравлических,
химических и др. Язык основан на концепции блоков с контактами, при
соединении
автоматически.
которых
необходимые
уравнения
генерируются
9.
Он не ограничивает количество компонентов моделируемойсистемы компонентами, поставляемыми разработчиками, – пользователь
может создавать свои собственные
компоненты, описывая их на
внутреннем языке описания блоков. Для описания блоков используется
понятие «класс». Непрерывная составляющая поведения элементарного
блока задается системой алгебро-дифференциальных уравнений или
формулами.
Дискретная
событий
(события
периодическими),
составляющая
задаются
при
задается
логическим
возникновении
описанием
условием
которых
могут
мгновенные присваивания переменным новых значений.
дискретных
или
являются
выполняться
10.
Язык Modelica поддерживает интеграцию с такими пакетамимоделирования,
поддержку
как
таких
поддерживается
Math
Works
стандартов,
возможность
как
MATLAB
ACSL,
использования
Simulink,
M-file,
обеспечивает
Simnon,
функций
и
также
процедур,
написанных на языке C. Для работы на языке Modelica необходим
компилятор, например Dymola, Omola, который, как правило, в отличие от
самого
языка
Modelica,
является
коммерческим,
а
не
свободно
распространяемым. В настоящее время для задач моделирования шире
всего применяются MATLAB и GPSS.
11.
Math Works MATLAB предназначен для проектирования системуправления;
анализа
данных;
обработки
изображений;
цифровой
обработки сигналов; визулизации полученных результатов и разработки
собственных
приложений.
конструкций,
позволяющих
MATLAB
помимо
выполнять
обычных
процедурное,
языковых
объектно-
ориентированное и визуальное программирование, содержит большое
количество встроенных алгоритмов для математических расчетов и
графической
визуализации,
для
анализа
и
визуализации
данных,
численных и символьных вычислений, создания инженерной и научной
графики, имитационного моделирования, программирования, разработки
приложений и графического интерфейса пользователя (GUI).
12.
Программы MATLAB являются платформонезависимыми, поэтомупользовательские программы могут при необходимости быть перенесены
на любую платформу без изменения.
Открытая
архитектура
облегчает
применение
MATLAB
для
изучения языковых конструкций, принципов программирования и создания
пользовательских приложений.
MATLAB содержит специализированные графики, помогающие
понять работу сложных систем, а также представить результаты их
исследования. С помощью MATLAB можно создавать высококачественную
графику для визуализации динамических процессов в исследуемых ЭК и
презентации.
13.
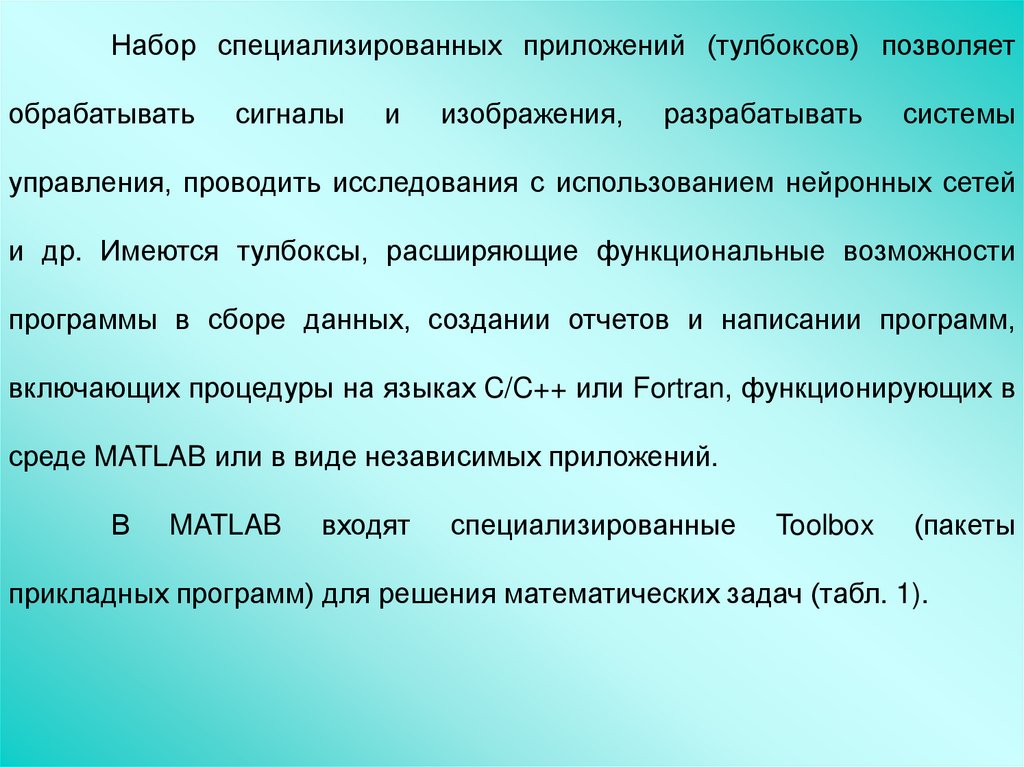
Набор специализированных приложений (тулбоксов) позволяетобрабатывать
сигналы
и
изображения,
разрабатывать
системы
управления, проводить исследования с использованием нейронных сетей
и др. Имеются тулбоксы, расширяющие функциональные возможности
программы в сборе данных, создании отчетов и написании программ,
включающих процедуры на языках C/C++ или Fortran, функционирующих в
среде MATLAB или в виде независимых приложений.
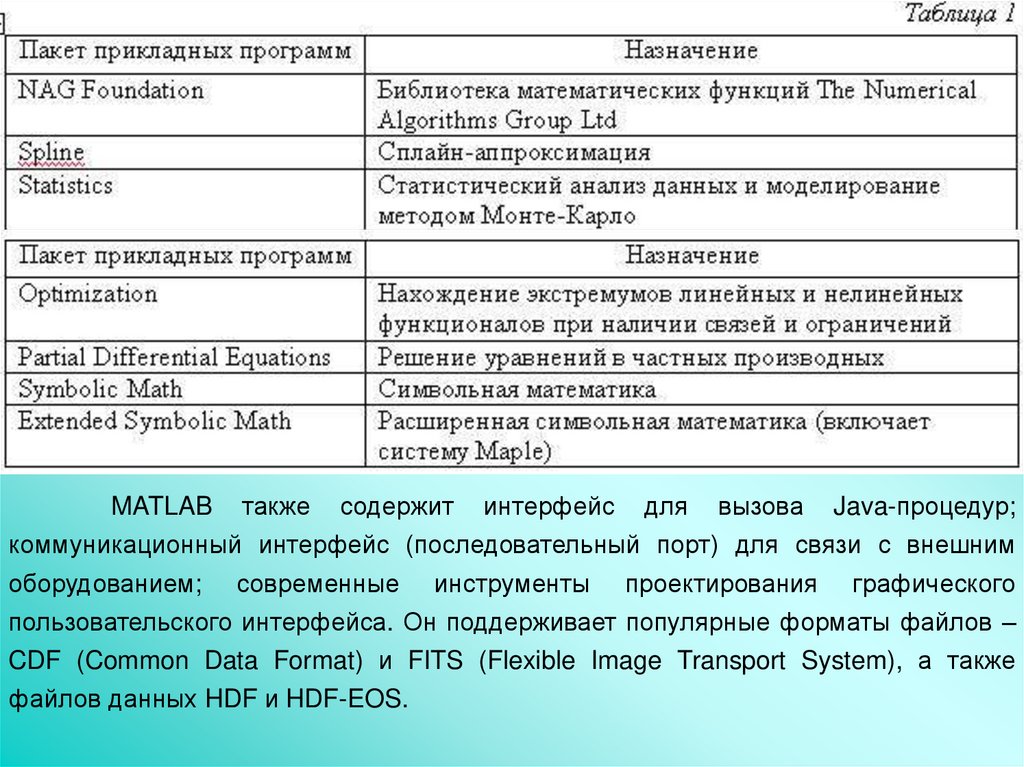
В
MATLAB
входят
специализированные
Toolbox
(пакеты
прикладных программ) для решения математических задач (табл. 1).
14.
MATLAB также содержит интерфейс для вызова Java-процедур;коммуникационный интерфейс (последовательный порт) для связи с внешним
оборудованием; современные инструменты проектирования графического
пользовательского интерфейса. Он поддерживает популярные форматы файлов –
CDF (Common Data Format) и FITS (Flexible Image Transport System), а также
файлов данных HDF и HDF-EOS.
15.
MATLAB Simulink и его приложенияДля моделирования, имитации и анализа динамических систем
применяется интерактивный инструмент Math Works MATLAB Simulink. Он
позволяет
при
помощи
графических
блок-диаграмм
моделировать
динамические системы, исследовать их работоспособность. Simulink
полностью интегрирован с MATLAB, обеспечивая немедленный доступ к
широкому спектру инструментов анализа и проектирования. Simulink также
интегрируется с приложением MATLAB Stateflow для моделирования
поведения, управляемого событиями. Эти преимущества делают Simulink
наиболее
популярным
инструментом
для
проектирования
систем
управления и коммуникации, цифровой обработки и других приложений.
16.
Simulink Performance Tools содержит четыре инструмента дляпользователей Simulink, проектирующих крупномасштабные, сложные
модели: Simulink Accelerator ускоряет выполнение кода при имитации
моделей
от
двух
до
десяти
раз;
Model
Differencing
графически
подчеркивает отличия между двумя моделями; Model Profiler собирает
данные функционирования и генерирует HTML-отчет; Model Coverage
выдает отчет о возможных путях имитации модели.
Для мониторинга сигналов и параметров в Simulink-моделях
применяется приложение Dials & Gauges Blockset.
17.
При создании и настраивании отчетов из MATLAB, Simulink иStateflow моделей и данных в различных выходных форматах, включая
HTML, RTF, XML и SGML, применяются приложения MATLAB Report
Generator
и
Simulink
Report
Generator.
Это
дает
возможность
автоматически документировать создаваемые системы, включая в них
любые данные из рабочей среды MATLAB.
18.
MATLAB Compiler включает MATLAB C/C++ Math and GraphicsLibraries. Он позволяет компилировать m-файлы в коды на С и C++. Это
дает
возможность
создавать
независимые
программные
продукты.
Компилятор содержит новые алгоритмы оптимизации, существенно
увеличивающие скорость выполнения. Модуль для Visual Studio позволяет
использовать MATLAB-компилятор из Microsoft Visual Studio.
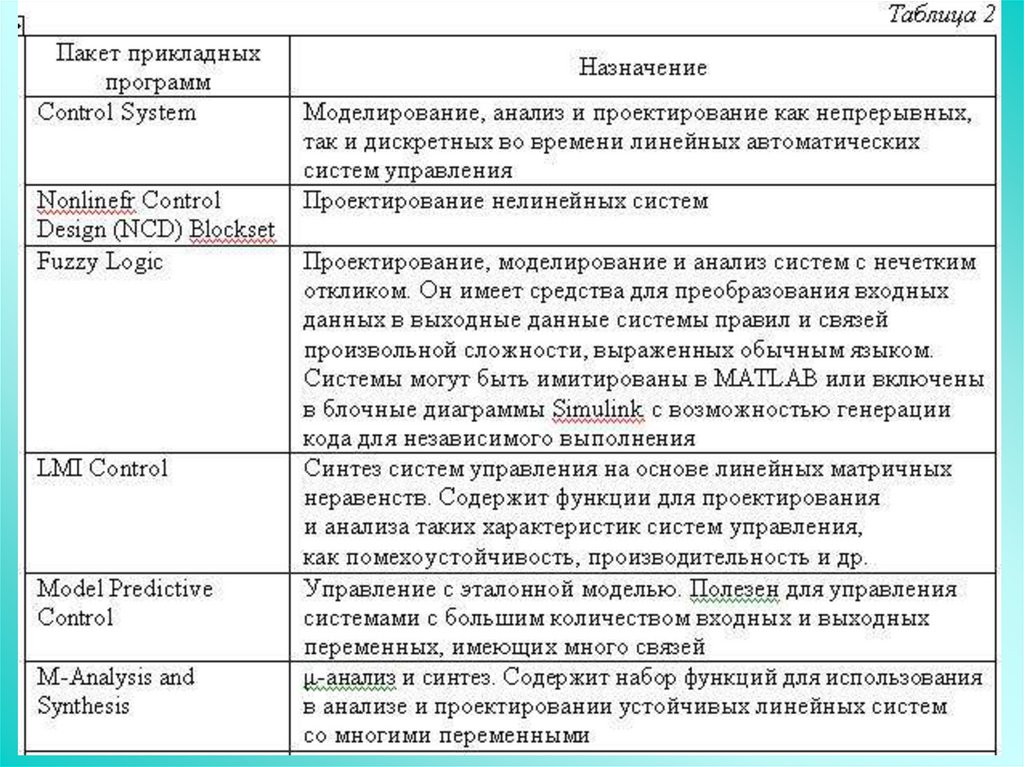
В
MATLAB
включены
специализированные
Toolbox,
предназначенные для автоматизации проектирования систем управления
(табл. 2).
19.
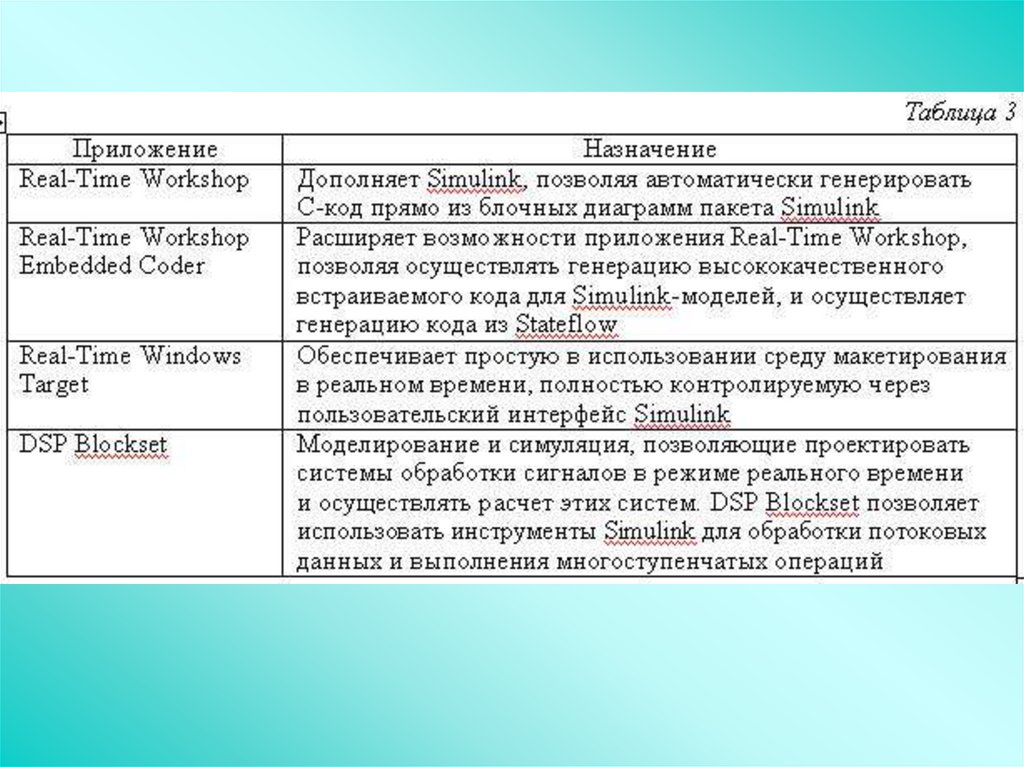
20.
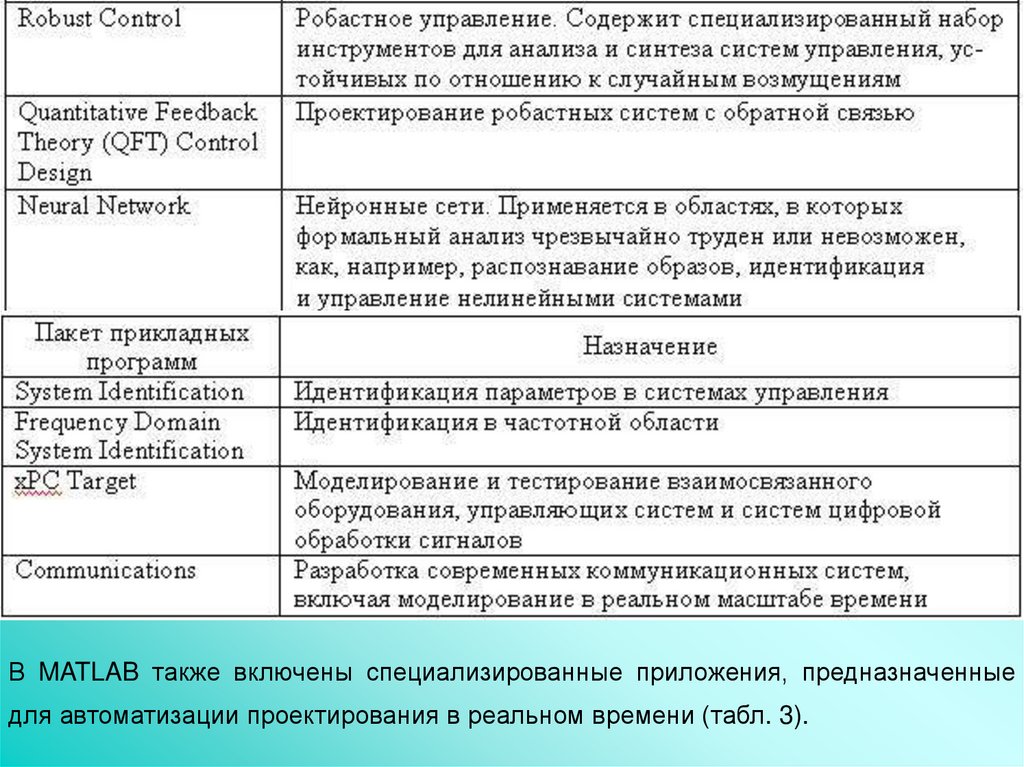
В MATLAB также включены специализированные приложения, предназначенныедля автоматизации проектирования в реальном времени (табл. 3).
21.
22.
Для моделирования и исследования электромеханических систем полезнымибудут следующие библиотеки MATLAB (табл. 4).
23.
Программные средства для визуализации движений механизмови процессов обработки вещества (материала)
Эффективность
проектирования
повышается,
если
при
исследовании СУ применяется визуализация динамических процессов в
ней. С этой целью, во-первых, применяются различные программные
средства
(OpenGL,
Language)),
Direct3D,
во-вторых,
язык
VRML
разрабатываются
(Virtual
Reality
программные
Modeling
комплексы
визуализации с помощью языков высокого уровня, например, С++.
Вначале остановимся на втором подходе. Для работы на этапе
макропроектирования программная система должна иметь библиотеку
модулей, отражающих конфигурацию и свойства типовых элементов
промышленных механизмов или технологических комплексов и эмулятор
программируемого контроллера (ЭПК), функциональным назначением
которого является непосредственно реализация алгоритма управления.
24.
Развивая блочно-модульную идеологию построения средств исистем управления до уровня механизмов, агрегатов и комплексов, можно
выделить
группы
функциональные
оборудованиях,
задачи
для
управления
которых
в
характерны
технологическом
общие
процессе
(функциональные модули). В соответствии с этим можно подготовить
программные модели модулей и программные блоки, решающие задачу
управления модулями. Из таких модулей можно формировать блокикомплексы и в соответствии с этой идеологией обеспечить экономичную
технологию проектирования компьютерных систем управления любыми
СУ.
25.
В результате вышеизложенного подхода может быть определенаобъектно-ориентированная
модель
программного
обеспечения
и
определены все основные объекты, включая данные и основные
операции, требуемые для выполнения системных функций, а также
следующие ее компоненты:
– диаграммы классов, содержащие ключевые классы предметной
области;
– спецификации классов, описывающие семантику классов, их
отношения, атрибуты и ключевые операции;
26.
–диаграммы
взаимодействий,
которые
изображают,
как
взаимодействуют объекты при выполнении системных функций;
– схемы организации функционирования электромеханических
комплексов,
используя
классификации/детализации
связи
родитель/потомок
с
и
схемы
потоков
различными
данных,
основаниями
классификации;
– словарь данных, в котором перечислены все основные сущности,
относящиеся к предметной области, включая классы, отношения и
атрибуты.
27.
Организационнаяструктура
отображает
собой
сложившуюся
модель функционирования комплекса. При декомпозиции выделяются
функциональные
подсистемы,
определяемые
типовыми
решаемыми
задачами.
В основе предлагаемой методики визуализации динамических
процессов
происходящих
в
СУ,
лежит
одновременное
решение
дифференциальных уравнений и в зависимости от этого динамическое
изменение в
примитивов
пространстве или плоскости положения графических
(точек,
линий,
окружностей,
прямоугольников
и
др.),
отображающих движения механизмов оборудования, входящего в состав
ЭК (табл. 5).
28.
Визуализацияболее
сложных
технологических
объектов
производится с использованием совокупности простейших графических
примитивов.
Основная проблема, которая возникает при этом – время решения
и объем информации о перемещении. Время решения зависит от порядка
дифференциальных
уравнений,
которыми
описывается
СУ
технологическим объектом. Но если учесть, что СУ на первой стадии
проектирования отлажена, т. е. настроены все ее контуры (рассчитаны
регуляторы), то все описание можно свести в этом случае к звену первого
порядка, т. е. к передаточной функции замкнутого внешнего контура, а
также математического описания свойств обрабатываемого материала.
29.
Это позволит повысить быстродействие в получении выходнойкоординаты, характеризующей исполнительный орган, и, как следствие,
уменьшить
объем
информации
о
перемещении.
Но
упрощение
математического описания потеряет всякий смысл, так как частоты
процессора ПК приближаются к той частоте, когда все расчеты будут
выполняться в реальном времени. Поэтому основной задачей является
формирование графических примитивов и их динамическое отображение
в зависимости от результатов компьютерного моделирования.
30.
31.
Длярешения
математический
вышепоставленных
пакет
MATLAB,
дописав
задач
применяют
недостающие
функции
(программные единицы).
Существует несколько способов взаимодействия системы MATLAB
с внешними программами:
1.
Можно
написать
расширение
MATLAB
на
обычных
языках
программирования, таких как С/С++, Fortran и т. п.
2. Можно вызвать вычислительное ядро MATLAB из своей программы и
получить результат вычислений среды MATLAB в свою программу. В этом
случае MATLAB выступает как своего рода вычислительный сервер для
внешней программы.
3. Средой MATLAB можно управлять при помощи команд DDE (Dynamic
Data Exchange) или ActiveX (OLE) Automation.
4. Можно просто обмениваться данными со средой MATLAB через MATфайлы, структура которых описана в документации к системе.
32.
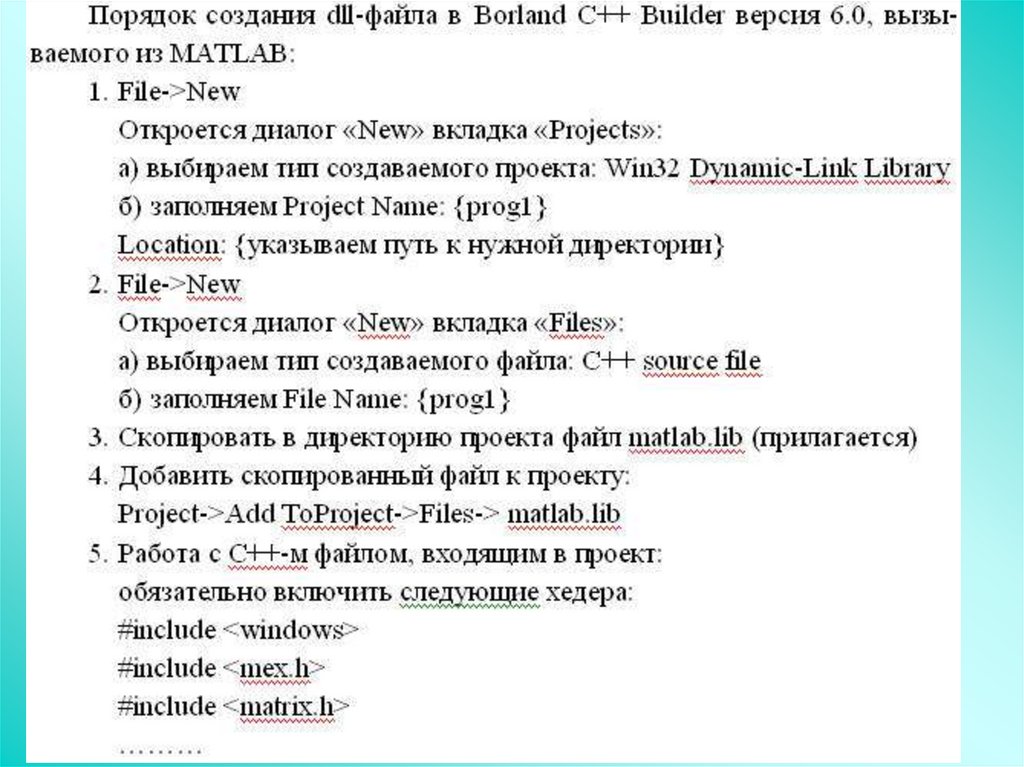
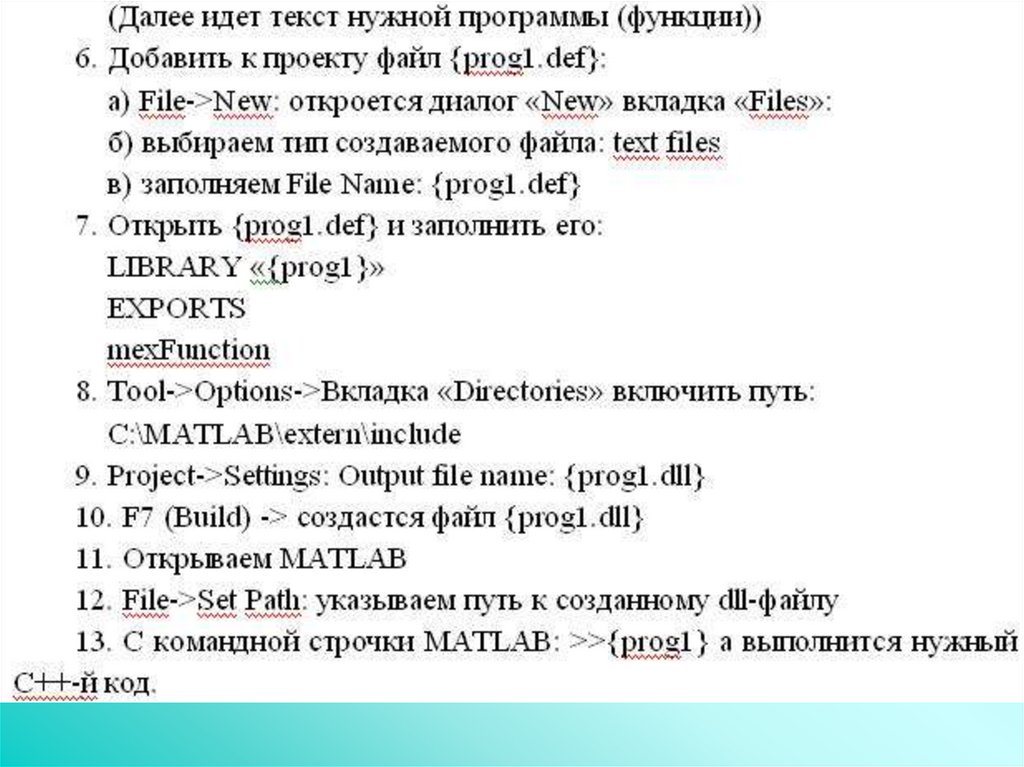
Для того чтобы написать модуль, расширяющий набор функцийMATLAB, нужно создать обычную динамическую библиотеку (DLL) для
Microsoft Windows со специальным набором функций (интерфейсом). Для
этого выбрана система программирования Borland C++ Builder версия 6.0,
которая является одной из систем программирования для разработок,
ориентированных
программирования.
на
Borland
концепцию
C++
Builder
визуально-событийного
версия
6.0
позволяет
разрабатывать 32-разрядные приложения для операционных систем
Windows; корректировать производные классы, функцию WinMain и пр.,
что при профессиональном подходе уменьшает вероятность ошибок в
программе и сама программа имеет меньший код по сравнению с другими
системами программирования в связи со спецификой языка С.
33.
В документации по системе MATLAB для подобных расширенийупотребляется
термин
MEX-файл
(Matlab
Extension).
Специально
назначать MEX в качестве расширения имени файла необязательно,
MATLAB может прекрасно работать и со стандартным расширением
подобных динамических библиотек – DLL.
Папка \matlab\extern на диске, на котором установлена система,
содержит все необходимые файлы-заголовки для программ на С (каталог
\matlab\extern\include),
а
также
несколько
примеров
модулей
(\matlab\extern\examples), реализующих некоторые расширения системы,
которые приведены целиком в виде исходных текстов программ на С.
Кроме того, имеется папка \matlab\extern\src в которой приведен
исходный
текст
некоторых
вспомогательных
облегчающий отладку модулей расширения MATLAB.
функций,
весьма
34.
В модулях-расширениях MATLAB (MEX-файлах) для обменапараметрами всех типов с вычислительной средой MATLAB используется
одна структура – mxArray (Matlab Extension Array).
Программный интерфейс создаваемой динамической библиотеки
достаточно прост, в нем должна быть экспортирована единственная
функция с двумя параметрами – входным массивом структур mxArray и
выходным массивом структур mxArray.
Прототип интерфейсной функции объявлен в заголовочном файле
\matlab\extern\include\mex.h.
35.
36.
37.
Еслидля
исследования
КЭС
применяется
подсистема
моделирования динамических процессов Math Works MATLAB Simulink, то
для создания нужного блока целесообразно применять технологию Sфункций (Simulink-функции). С помощью языков программирования (С,
C++, Ada или Fortran) пользователь может создавать описание сколь
угодно
системы
сложных
Simulink
математических
блоков
с
(блоков,
аппаратными
уравнений;
обеспечивающих
средствами;
блоков,
взаимодействие
блоков
реализующих
на
основе
анимационные
возможности) и включать их в Simulink-модель, при этом они ничем не
отличаются от стандартных библиотечных блоков системы Simulink.
38.
Создаваемыеблоки
могут
реализовывать
непрерывные,
дискретные или гибридные (дискретно-непрерывные) модели. S-функции,
созданные на языках С, C++, Ada или Fortran, компилируются в
исполняемые файлы с расширением *.dll.
Для решения поставленной задачи можно также применить
следующие программные продукты.
OpenGL – это графический стандарт, который обеспечивает
широкие возможности несмотря на то, что поддерживает простейшую
модель
программирования.
Её
процедурный
интерфейс
позволяет
программистам легко и эффективно описывать как простые, так и
комплексные задачи воспроизведения.
39.
OpenGL является программным интерфейсом для графическихустройств и включает в себя несколько сотен функций и процедур, которые
позволяют программисту определять объекты и сложные операции для
создания
высококачественных
образов.
OpenGL
является
низкоуровневым, процедурным API-языком, что вынуждает программиста
создавать
точную
последовательность
шагов,
чтобы
построить
результирующую растровую графику (императивный подход). Это является
основным отличием от дескрипторных подходов, когда вся сцена
передается в виде структуры данных (чаще всего дерева), которая
обрабатывается и строится на экране.
40.
С одной стороны, императивный подход требует от программистаглубокого знания законов трёхмерной графики и математических моделей,
с другой стороны, даёт свободу внедрения различных инноваций.
OpenGL поддерживает только графический вывод и не работает ни
с какими другими периферийными устройствами (мышь, джойстик,
клавиатура, звуковая карта). Для доступа к этим устройствам под ОС
Windows необходимо использовать Win32 API или DirectX.
41.
Система Direct3D (как и всё семейство DirectX) построена наоснове COM – составной объектной модели (Component Object Model),
технологии, которая используется подсистемой связывания и внедрения
объектов (OLE/ActiveX). COM-объекты при программировании на C++
играют ту же роль, что и библиотеки динамической компоновки (DLL) при
программировании для Windows на языке C++. Это не означает, что COMобъекты могут использоваться только в приложениях, написанных на C++,
однако в программах, написанных на C++, при обращении к интерфейсу
COM-объекта
необходимо
явно
указывать,
что
вызов
функции
производится посредством таблицы указателей (аналог vtable для
виртуальных функций классов C++).
42.
ИнтерфейсDirect3D
в
отличие
от
других
API
для
программирования 3D-графики состоит из нескольких уровней:
– верхнего уровня или «абстрактного режима» (Retained Mode);
– нижнего уровня или «непосредственного режима» (Immediate
Mode);
– драйверов устройств.
Кроме того, Direct3D включает в себя два абсолютно независимых
набора функций, предоставляющих одни и те же функции для работы с
3D-графикой на низком уровне:
– буфер выполнения (Execute Buffers);
– рисование примитивов (Draw Primitives).
Основные возможности Direct3D:
– переключаемый буфер глубины;
– освещение Ламберта и Гуро;
43.
– множество источников разных типов;– полная поддержка работы с материалами и текстурами,
мипмэппинг;
– быстрые эффективные драйверы программной эмуляции;
– трансформации и отсечение;
– полная поддержка на NT.
Библиотека Direct3D постоянно изменяется и расширяется с целью
поддержки всех возможных ускорителей новых наборов инструкций.
Новые возможности библиотеки часто заимствуются из расширений
библиотеки OpenGL.
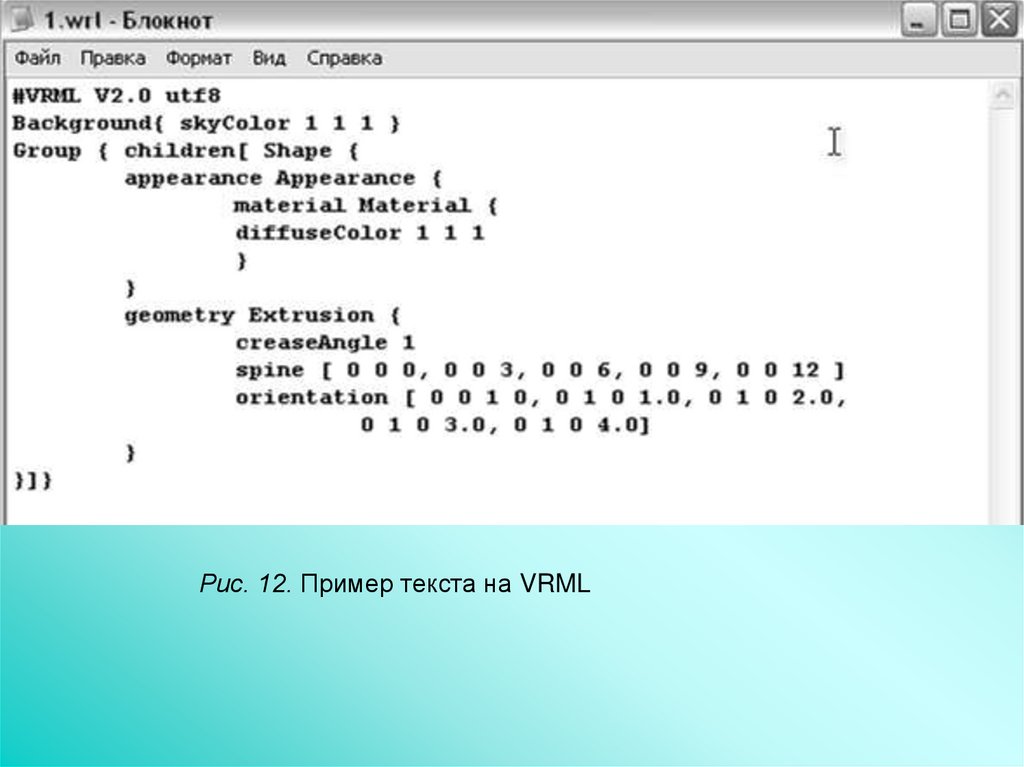
44.
ЯзыкVRML
(Virtual
Reality
Modeling
Language
–
язык
моделирования виртуальной реальности) – предназначен для описания
трехмерных
изображений
и
оперирует
объектами,
описывающими
геометрические фигуры и их расположение в пространстве. VRML-файл
представляет
собой
обычный
текстовой
файл,
интерпретируемый
браузером (рис. 12). Поскольку большинство браузеров не имеет
встроенных средств поддержки VRML, для просмотра VRML-документов
необходимо подключить вспомогательную программу – VRML-браузер
(например Live3D, CosmoPlayer или Cortona). Существует немало VRML-
редакторов, делающих процесс создания VRML-документов удобнее и
быстрее, однако несложные модели можно создать и при помощи простого
текстового редактора.
45.
Рис. 12. Пример текста на VRML46.
VRML обладает следующими возможностями:–
геометрические
примитивы
(куб,
сфера,
многоуровневые
поверхности);
– работа с цветом в RGBA и индексном режимах;
– удаление невидимых линий и поверхностей;
– прозрачность;
– наложение текстуры;
– применение освещения;
– использование эффекта «тумана»;
– перевод трехмерных файлов форматов DXF, 3D Studio и IGES в
VRML;
– интегрирован в систему MATLAB Simulink.
47.
VRMLпозволяет
создавать
трехмерные
модели
типовых
механизмов в виде совокупности простых (параллелепипед, конус,
цилиндр и эллипсоид) и сложных геометрических фигур (экструзия и др),
которые имеют иерархические связи. В среду MATLAB интегрирован VRealm Builder. V-Realm Builder – это инструментальное средство языка
трехмерного моделирования VRML, включающее возможность работы с
библиотеками файлов VRML. При создании сложных трехмерных объектов
V-Realm Builder позволяет импортировать их из таких пакетов, как 3Dmax и
Autodesk MAP 3D, которые специально для этого предназначены. Также в
VRML существует возможность задания дерева наследования, поэтому
изменение параметров (например, перемещение или масштабирование)
одной из фигур может повлечь за собой изменение подчиненных фигур,
что удобно использовать при управлении моделями. В библиотеку Simulink
выходят блоки, связывающие среду с VRML-объектами. Эти возможности
определили выбор средства визуализации.
48.
Программные средства для оптимизацииДля оптимизации требуется применение таких программных
средств, которые обеспечивают достижение требуемого результата за
минимальное время.
В настоящее время существует множество работ, в которых подробно
изложены различные методы оптимизации, поэтому не имеет смысла
излагать подробно их суть. Приведем только наиболее важные методы и
их иерархию.
Существуют следующие методы оптимизации:
Одномерная оптимизация, включающая: а) прямые методы (перебора,
поразрядного
поиска,
исключения
отрезков,
парабол);
б)
методы,
использующие производные функции (средней точки, хорд, Ньютона,
кубической аппроксимации); в) минимизации многомодальных функций
(перебора, ломаных).
49.
Безусловная минимизация функций многих переменных: а)прямые методы (минимизация по правильному симплексу, по
деформированному симплексу, циклического покоординатного спуска,
Хука–Дживса, случайного поиска, сопряженных направлений); б)
использующие производные функции (градиентного спуска,
наискорейшего спуска, сопряженных градиентов, Ньютона,
квазиньютоновские).
Многомерная минимизация при наличии ограничений: а)
линейное программирование (графический, симплекс-таблица, симплексметод, искусственного базиса, симплекс-метод при отсутствии условий
неотрицательности
(возможных
переменных);
направлений
(случай
б)
нелинейное
линейных
программирование
ограничений,
случай
нелинейных ограничений), градиентные (проекции градиента, условного
градиента), последовательной безусловной минимизации (штрафных
функций, барьерных функций)).
Решение дискретных задач оптимизации: отсечений, ветвей и
границ, динамического программирования.
50.
Оптимизацияприближенные
методы
в
бесконечномерных
безусловной
пространствах:
минимизации
функционалов
а)
в
гильбертовом пространстве (градиентного спуска, наискорейшего спуска,
сопряженных
градиентов);
б)
приближенные
методы
минимизации
функционалов при наличии ограничений (проекции градиента, штрафных
функционалов, условного градиента).
Выбор алгоритма оптимизации зависит от таких факторов, как
точность поиска экстремума, быстродействие, условия функционирования
системы, и определяется решением конкретной задачи. К этой группе
методов можно отнести методы безусловной минимизации функций многих
переменных и многомерной минимизации при наличии ограничений
(нелинейное программирование).
Для решения поставленной задачи возможно применение двух toolbox
(приложений) SIMULINK и OPTIMIZATION пакета MATLAB.
51.
В Optimization Toolbox используется три метода для решениянелинейных задач без наличия ограничений: квази-Ньютоновский метод;
метод Нелдера Мида; метод доверительных областей.
Задачи
нелинейной
оптимизации
при
наличии
ограничений
представляют собой комбинацию неких нелинейных целевых функций и
могут иметь линейные или нелинейные ограничения. В Optimization
Toolbox используется два основных метода для решения подобных задач:
доверительных областей; последовательное применение активного
набора задач квадратичного программирования.
52.
Многокритериальная оптимизация предназначена в основном дляминимизации
многоцелевых
функций
с
учетом
некоего
набора
ограничений. В Optimization Toolbox реализованы два типа постановки
задачи многокритериальной оптимизации: задача достижения цели и
задача минимакса.
Optimization
может
Toolbox
решать
нелинейные
задачи
методом
наименьших квадратов. Для этого в Optimization Toolbox используется три
метода: доверительных областей; Левенберга–Марквардта; Ньютона–
Гаусса.
В
задачах
линейного
программирования
целевая
функция
представляет собой некое линейное выражение, на которое могут быть
наложены ограничения в виде линейных равенств или неравенств. Для
решения данного типа задач используются следующие два метода:
симплексный; внутренней точки. Кроме известных и традиционных
методов
оптимизации
могут
применяться
и
основанные на нейронных сетях и нечеткой логики.
современные
методы,
53.
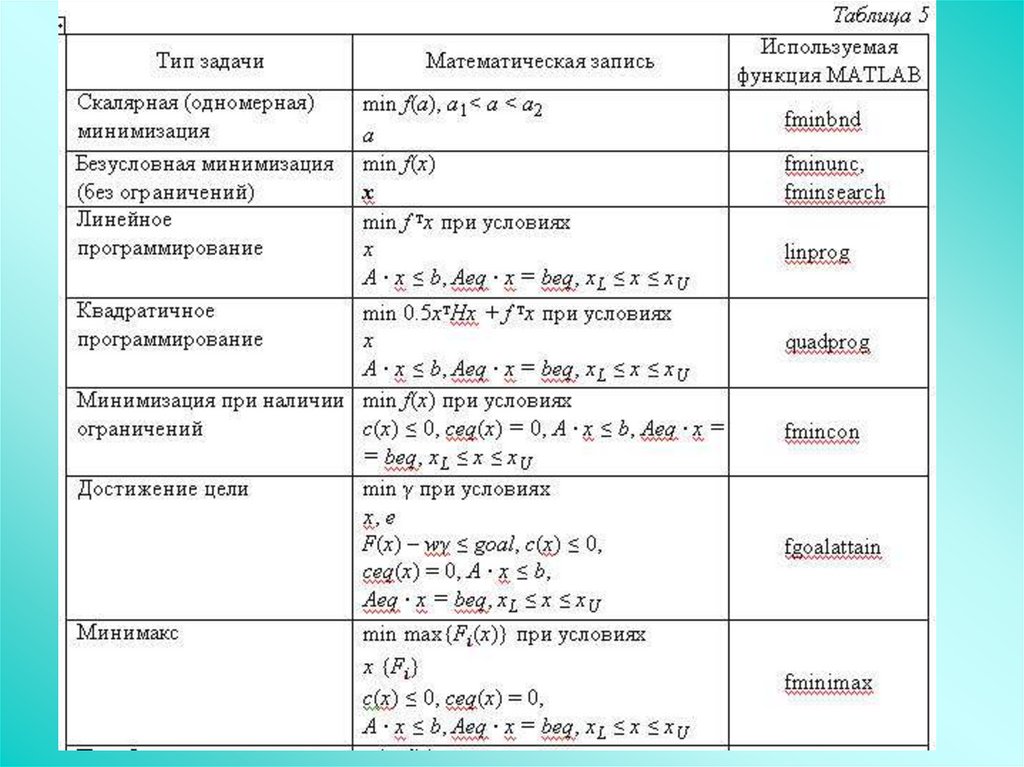
MATLAB Optimization ToolboxОсновные типы задач оптимизации, решаемых системой MATLAB
Optimization Toolbox, представлены в табл. 5.
В табл. 5 приняты следующие обозначения: а – скалярный
аргумент; х, γ – в общем случае векторные аргументы; f(а), f(x) –
скалярные функции; F(x), c(x), ceq(x), K(x, w) – векторные функции; A, Aeq,
С, Н – матрицы; b, beq, d, f, w, goal – векторы; xL, xU – соответственно,
нижняя и верхняя границы области изменения аргумента.
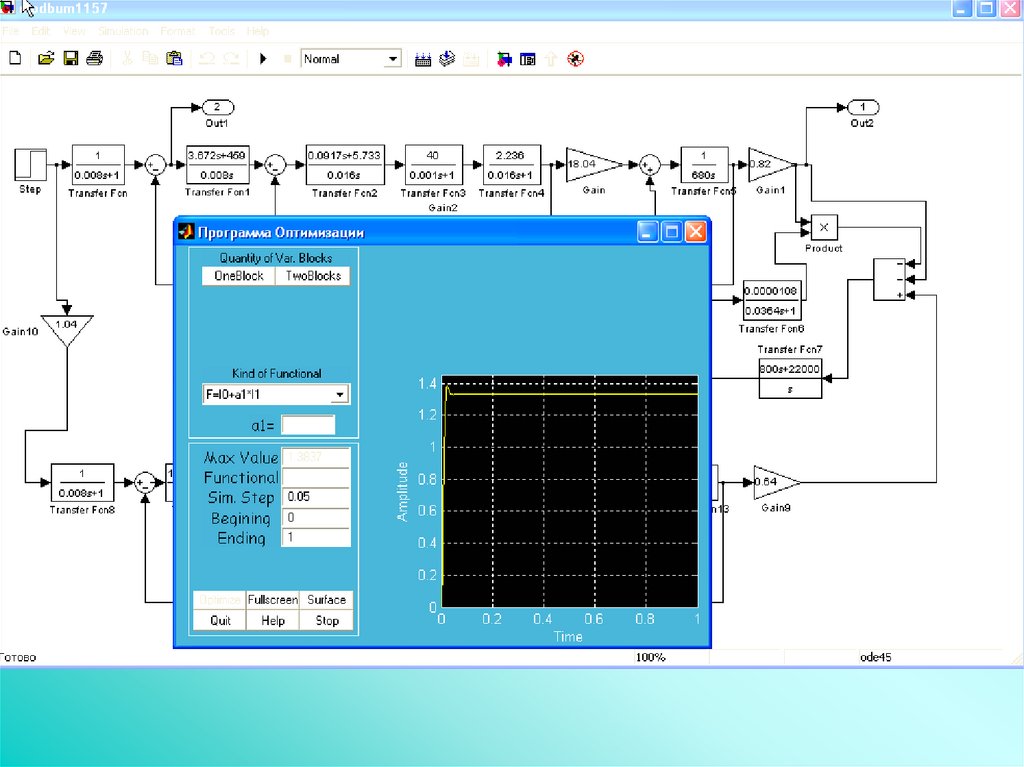
Но этапу поиска экстремума функционала качества, как правило,
предшествует подготовительная работа, связанная с созданием удобного
пользовательского интерфейса. Это необходимо делать, так как напрямую
методы оптимизации, приведенные в табл. 5, использовать сложно.
В качестве примера рассмотрим оптимизацию коэффициентов ПИ
регуляторов скорости секции бумагоделательной машины.
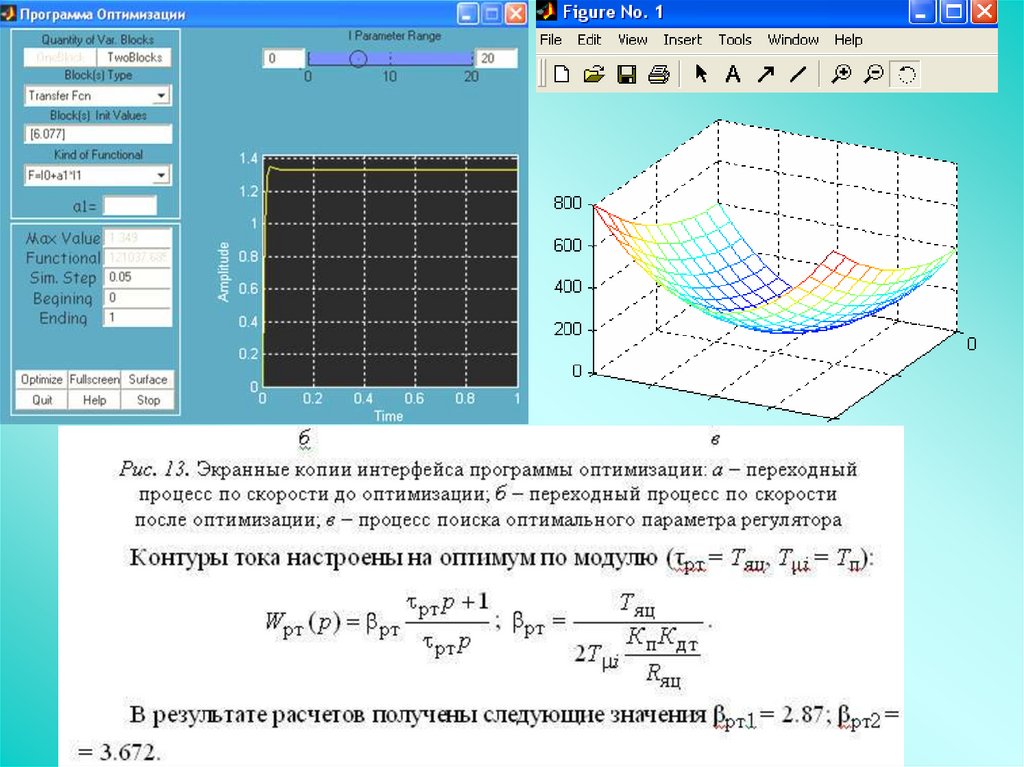
Оптимизация производилась по функционалу качества, имеющему
вид
54.
55.
56.
57.
58.
59.
Перечислимнекоторые
другие
программные
продукты,
используемые для моделирования систем. Полные сведения об их
возможностях можно получить в Internet.
AnyLogic – графическая среда для моделирования сложных
дискретно/непрерывных
(гибридных)
систем.
Удобно,
когда
много
движущихся объектов, они исчезают, появляются, видят друг друга,
взаимодействуют и т.д.
DyMoLa – лаборатория (пакет) для динамического моделирования
во временном домене механических, электронных, гидравлических,
энергетических
систем,
в
блочном
представлении,
с
интерфейсами для интеграции и поддержкой языка Modelica.
открытыми
60.
DYNAST – ПО для расчета переходных процессов, символического ичастотного анализа линеаризованных систем, описываемых системами
дифференциальных и алгебраических уравнений, физическими процесса-
ми, и блок-схемами. Обслуживается в пакетном режиме удаленным решателем.
EASY5
(MSC.
–
Software.)
специализированный
продукт
для
моделирования широкого круга сложных технических систем и устройств
на схемном уровне (рис. 2.21). Средствами этого программного продукта
моделируются
гидроприводы,
цифровые
и
трансмиссии,
аналоговые
двигатели
системы
внутреннего
управления,
сгорания,
пневматические, механические и электрические устройства, системы
кондиционирования,
управления
системы впрыска топлива и т.д.
аэродинамическими
поверхностями,
61.
Смоделированные в EASY5 системы включаются в модели,созданные в Patran и/или Adams с целью проведения всесторонних
исследований функционирования изделий на различных режимах работы
и
в
различных
условиях
эксплуатации.
При
этом
моделируется
конструкция машин, механизмов, приборов и других технических объектов
в
совместной
работе
с
системами
управления,
гидравлическими,
пневматическими, электрическими системами и т.д. Для углубленного
анализа и моделирования используется тесная интеграция с другими
системами MSC. Software., а также с системами других компанийразработчиков: MSC Nastran, Adams, Marc, Dytran, LS-Dyna, Flight Loads &
Dynamics, Fatigue, Mvision, Simdesigner, Sofy, Explore, matlab/simulink, dads,
ricardo wave, ANSYS, Abaqus и др.
62.
Cистема EASY5 является одним из важнейших компонентовсовременных vpd-технологий. Программный пакет EASY5 включает
множество готовых математических моделей, реализованных в виде
отдельных функциональных блоков (сумматоров, делителей, фильтров,
интеграторов, клапанов, двигателей, теплообменников, редукторов, муфт
сцепления и др.). С помощью языков C или FORTRAN можно создавать
собственные функциональные блоки.
Пользователь EASY5 –моделирование изделия происходит на
уровне
функциональных
блоков,
и
оптимизирует
параметры
разрабатываемых систем изделия. EASY5 поддерживает возможность
экспорта модели (например, модели системы управления) в модель Adams
или, наоборот, импорта модели механизма из Adams в EASY5.
63.
Кроме того, модели EASY5 можно встраивать в модели системыmatlab/simulink. В состав EASY5 включен модуль matrix algebra tool,
предназначенный для выполнения операций над матрицами (может
использоваться для подготовки данных, анализа результатов и т.п.).
64.
65.
Пользователям EASY5 предложены библиотеки компонентов длямногодисциплинарного анализа, включая специализированные наборы
для аэрокосмической, автомобильной и других отраслей промышленности.
Модуль
library
developer
toolkit
позволяет
создавать
собственные
библиотеки компонентов.
На базе перечисленных возможностей системы EASY5 и в
интеграции с другими системами MSC. Software. создаются полные
функциональные модели самолетов, автомобилей, танков, экскаваторов,
приборов и т.д., исследуется их работа при выполнении различных задач и
в различных условиях эксплуатации.
66.
Adams – программное средство для виртуального моделированиясложных машин и механизмов. С помощью Adams быстро создается
полностью
параметризированная
модель
изделия:
она
строится
непосредственно в препроцессоре или импортируется из наиболее
популярных CAD-систем. Задав связи компонентов модели, приложив
нагрузки, определив параметры кинематического воздействия и запустив
расчет, можно получить данные, полностью идентичные результатам
натурных испытаний системы.
Пользователю
доступны:
выявление
параметров
изделия,
определяющих его работоспособность и точность; проверка компонентов
машины
на
столкновения,
определение
габаритных
размеров
пространства, необходимого для ее движущихся частей; определение
уровня
действующих
нагрузок,
оптимизация параметров изделия.
необходимой
мощности
приводов;
67.
Adams позволяет исследовать десятки, сотни и даже тысячивариантов
конструкции,
выбирать
лучший,
совершенствовать
и
совершенствовать будущее изделие, затрачивая на это во много раз
меньше времени и средств, чем при традиционном подходе.
Adams может использоваться для улучшения самых разных
конструкций: от простых механических и электромеханических устройств
до автомобилей и самолетов, железнодорожной техники и космических
аппаратов.
68.
Adams от других систем моделирования и проектированияотличают:
– широкий набор видов кинематических связей, упругих и
диссипативных звеньев, нагрузок, кинематических воздействий;
–
совместимость
с
системами
моделирования
систем
автоматического регулирования и управления Easy5 и MATLAB/Simulink, а
также пользовательскими программами, что обеспечивает моделирование
и исследование сложных гетерогенных динамических систем;
– легкость в изучении и использовании – моделирование
соответствует основным шагам построения физического макета
(построение виртуальных прототипов, выполнение набора тестов,
совершенствование конструкции);
– полная параметризация виртуальных моделей – любые
параметры прототипа могут быть связаны функциональной зависимостью,
модификация какого-либо размера модели автоматически приводит к
изменению ее конфигурации и т. п.;
–
эффективные
средства
визуализации
результатов
моделирования, включая анимацию и построение графиков.
69.
Нарядус
развитием
универсальных
возможностей
пакета,
разработчиками Adams созданы проблемно-ориентированные модули,
обеспечивающие точное и быстрое моделирование самых сложных
объектов, например, устройств автоматического управления (ADAMS /
Control) и др.
В программном пакете Adams предусмотрена возможность учета
податливости компонентов исследуемой машины (механизма). Для этого
упругие
характеристики
частей
машины
определяются
в
конечно-
элементной системе (например, MD Nastran или MSC Nastran), а затем в
специальном формате с помощью модуля Adams/Flex передаются в Adams
и включаются в виртуальную модель. Использование такой модели
позволяет не только учесть влияние податливости звеньев на динамику
механизма, но также вычислить (с помощью модуля Adams/Durability) и
отобразить на экране компьютера непосредственно в среде Adams общий
уровень напряжений в упругом компоненте.
70.
Результаты расчёта деформаций упругого компонента в Adamsмогут быть также «переданы» в конечно-элементную систему (MD Nastran
или MSC Nastran) для точного определения уровня напряжений с учётом
всех особенностей её конфигурации. В дальнейшем эти данные могут
быть использованы и для анализа долговечности детали с помощью
системы
Fatigue.
Такая
технология
обеспечивает
существенное
повышение точности моделирования современных, оптимизированных по
массе высокодинамичных механизмов. В программном пакете Adams
обеспечивается возможность создания моделей, включающих контактное
взаимодействие упругого тела с твёрдым телом, а также двух упругих тел.
Основой Adams являются системы дифференциальных уравнений,
описывающих динамику исследуемого объекта.
71.
МВТУ – программа «Моделирование в технических устройствах».Является
отечественной
разработкой
с
классическим
интерфейсом
блочного моделирования. Исследование моделей возможно как во
временном, так и в частотном доменах.
Model Vision Studium – новационный инструмент для визуального
интерактивного моделирования во временном домене структурно-сложных
гибридных
систем
с
применением
карт
поведения
и
объектно-
ориентированного языка описаний.
Modelica – универсальный объектно-ориентированный язык для
моделирования физических систем. Поддерживается пакетами: Dymola,
MathModelica (Mathematica), ALLAN, 20-sim, SMILE/M.
72.
SamSim – моделирование линейных и нелинейных цепей САУ,построение временных, частотных характеристик, фазовых портретов и
годографов. ПО начального уровня, поможет студентам визуализировать
процессы в любой точке модели.
SIMPLОRER Simulation Center – интегрированные инструменты
для моделирования и анализа систем под контролем графа конечного
автомата,
описанных
элементами
электрических
и
блок-схем
+
собственный SML-язык для компилятора.
VTB Virtual Test Bed – моделирующий комплекс для визуальной
(3D) симуляции технических систем различной физической природы –
энергетика, электромеханика и др. Модели описываются на языках: ACSL,
Mode-lica, Siber, SPICE, Simulink. + аппаратура ввода вывода.
73.
КОПРАС–
комплекс
программ
для
анализа
и
синтеза
автоматических систем (для ТАУ). Имеет большой набор решающих,
функциональных элементов и сервисных функций. Динамические модели
описываются структурными схемами.
Пакет PDELab – решение систем нелинейных дифференциальных
уравнений в частных производных. Компьютерное моделирование в
физике, химии, биологии и медицине.
APM
WinMachine
автоматизированного
(НТЦ
расчета
и
«АПМ»)
–
CAD/CAE-система
проектирования
механического
оборудования и конструкций в области машиностроения. Эта система в
полном объеме учитывает требования государственных стандартов и
правил, относящихся как к оформлению конструкторской документации,
так и к расчетным алгоритмам.
74.
Комплекс APM WinMachine позволяет решать следующие задачи:– проектирование и анализ механического оборудования и его
элементов с использованием инженерных методик;
– анализ напряженно-деформированного состояния трехмерных
объектов любой сложности при произвольном закреплении, статическом
или динамическом нагружении;
– создание конструкторской документации;
– проектирование и расчет технологических процессов.
75.
В состав APM WinMachine входят следующие АРМ:1. APM Graph – двумерный графический редактор, который
используется
для
оформления
графической
части
конструкторской
документации в различных областях техники, науки, в архитектуре и
строительстве. Модуль имеет стандартный набор инструментов для
оформления чертежей, а также инструменты параметризации объектов и
расчетов размерных цепей.
2.
APM
Studio
–
модуль
моделирования
и
импорта
(поддерживается импорт из формата STEP) трехмерных поверхностных и
твердотельных моделей с инструментами указания опор и приложения
различных нагрузок и встроенным генератором разбиения на конечноэлементную сетку.
3. Конечно-элементный анализ. APM Structure3D. Модуль APM
Structure3D предназначен для расчета напряженно-деформированного
состояния стержневых, пластинчатых, оболочечных и твердотельных
конструкций, а также их произвольных комбинаций.
76.
Модуль APM Structure3D позволяет решать следующие задачи: 1)cопределение полей эквивалентных напряжений и их составляющих; 2)
расчет
линейных,
угловых
и
результирующих
перемещений;
3)
определение внутренних усилий; 4) расчет устойчивости и формы потери
устойчивости;
5)
собственных форм;
определение
частот
собственных
колебаний
и
6) расчет вынужденных колебаний и анимация
колебательного процесса по заданной вынуждающей нагрузке, расчет на
вибрацию оснований; 7) расчет температурных полей и термонапряжений;
8) расчет усталостной прочности; и др.
4. APM Dynamics. Модуль APM Dynamics предназначен для
кинематического анализа рычажных механизмов. Результатами расчета
модели
являются
траектории
перемещения,
графики
скоростей,
ускорений, силовых факторов в узловых точках и анимация работы
механизма.
77.
5. APM Beam. С помощью модуля APM Beam можно выполнитьрасчет балки и подбор ее наиболее подходящего поперечного сечения.
6. Инженерный анализ. APM Bear. APM Bear – модуль расчета и
проектирования неидеальных подшипников качения. С помощью APM Bear
можно рассчитать: перемещения (жесткость); долговечность; момент
трения;
наибольшие
контактные
напряжения;
потери
мощности;
тепловыделение; силы, действующие на тела качения.
7. APM Shaft. APM Shaft – модуль проектирования валов и осей.
Модуль АРМ Shaft позволяет выполнить весь цикл проектирования валов и
осей, начиная от разработки конструкции и заканчивая статическим и
динамическим анализом.
78.
8. APM Trans. APM Trans – модуль проектирования и проверкимеханических
передач
вращения.
С
помощью
APM
Trans
можно
проектировать и проверять следующие типы передач: 1) цилиндрические с
прямым
зубом
как
внешнего,
так
и
внутреннего
зацепления;
2)
цилиндрические с косым зубом внешнего зацепления; 3) шевронные; 4)
конические с прямым и круговым зубьями; 5) червячные, с архимедовым,
эвольвентным и конволютным червяком и глобоидные; и др.
9.
APM
проектирования
Drive.
APM
привода
Drive
–
модуль
вращательного
автоматизированного
движения
произвольной
структуры.
10. APM Spring. APM Spring – модуль проектирования упругих
элементов машин.
11. APM Joint. APM Joint – модуль проектирования соединений
элементов машин. Модуль позволяет выполнить комплексный расчет и
анализ
соединений,
машиностроении.
которые
наиболее
часто
используются
в
79.
12. APM Plain. APM Plain – модуль проектирования и расчетаподшипников скольжения.
13. APM Cam. APM Cam – модуль проектирования кулачковых
механизмов.
14. APM Screw. APM Screw – модуль проектирования неидеальных
винтовых передач. С помощью APM Screw могут быть рассчитаны
наиболее широко распространенные типы винтовых передач: винтовая
передача скольжения, шариковая винтовая передача и планетарная
винтовая (роликовая винтовая) передача. Модуль предназначен для
комплексного анализа винтовых передач и расчета их основных
параметров.
15. Технологическая подготовка производства. APM Technology.
APM Technology – модуль проектирования технологических процессов.
С помощью APM Technology можно: 1) разрабатывать технологические
процессы, используя справочные данные, базы данных оборудования и
технологической оснастки; 2) выполнять расчеты режимов обработки и
норм
времени;
3)
оформлять
технологическую
документацию
(маршрутные и операционные карты, карты технологических процессов,
карты эскизов).
80.
16. APM Calculation Instrument. APM Calculation Instrument –модуль, предназначенный для выполнения инженерных (конструкторских и
технологических) расчетов. Вместе с модулем поставляется APM
Technology Calculation – база стандартных технологических расчетов,
выполняемых при проектировании технологических процессов. В модуле
также предусмотрена возможность добавления собственных расчетных
программ (алгоритмов расчетов).
17. Базы данных. В состав комплекса APM WinMachine входят
следующие базы данных: а) APM Mechanical Data – база данных
стандартных деталей и узлов, справочных данных по общему
машиностроению; б) APM Technology Data – база стандартных
информационных данных для проектирования технологических процессов;
в) APM Material Data – модуль хранения и редактирования параметров
материалов.
Работа с существующими базами данных проходит в модуле
создания и редактирования баз данных – APM Base. APM Base содержит
необходимый функционал для поиска, редактирования и расширения
информационного массива вышеперечисленных баз данных или
составления собственных.
81.
MD Nastran (от MultiDiscipline Nastran) – система, объединяющаялучшие в своем классе системы компьютерного инженерного анализа,
включая MSC Nastran, Marc, Dytran и LS-DYNA в одну полностью
интегрированную суперсистему для проведения «многодисциплинарного»
моделирования в масштабах предприятия.
MD
Nastran
дает
возможность
пользователям
перейти
от
узкоспециализированных инструментов моделирования и анализа к
интегрированному решению в масштабах предприятия. Использование
единой расчетной модели для «многодисциплинарного» моделирования
позволяет минимизировать время, обычно затрачиваемое на подготовку
множества расчетных моделей, преобразование и передачу данных от
одной расчетной модели в одной системе к другой модели в другой
системе
(решается
проблема
преобразованиях ошибок).
исключения
вносимых
при
таких
82.
MD Nastran построен на базе MSC Nastran –системы конечноэлементного анализа. В дополнение к возможностям MSC Nastran, MDNastran включает в себя решатель LS-DYNA в виде последовательности
решения SOL 700, расширенный нелинейный статический и динамический
анализ с помощью новой последовательности решения SOL 400,
алгоритмы решения контактных задач в рамках линейного и нелинейного
анализа и т.д.
Решение SOL 700 предназначено, преимущественно, для
моделирования высокоскоростного нагружения различных изделий,
включая их большие деформации и разрушение (например, соударения
различных объектов, технологические процессы типа штамповки, ковки и
т.п.) и т.д. В SOL 700 для решения нелинейных задач применяется явная
схема интегрирования. Производительность SOL 700 особенно высока при
решении задач на многопроцессорных вычислительных комплексах.
Вычислительная производительность MD Nastran оптимизирована
для решения больших и сверхбольших задач и выполнения комплексных,
связанных видов «многодисциплинарного» анализа.
83.
MSC Nastran. MSC Nastran – продукт MSC. MSC Nastranобеспечивает полный набор расчетов, включая расчет напряженнодеформированного состояния, запасов прочности, собственных частот и
форм колебаний, анализ устойчивости, исследование установившихся и
неустановившихся
теплопередачи,
нелинейных
динамических
акустических
переходных
процессов,
явлений,
процессов,
решение
нелинейных
анализ
задач
статических
сложного
и
контактного
взаимодействия, расчет критических частот и вибраций роторных машин,
анализ частотных характеристик при воздействии случайных нагрузок и
импульсного широкополосного воздействия, исследование аэроупругости
на дозвуковых и сверхзвуковых скоростях.
В MSC Nastran моделирируются практически все типы материалов,
включая композитные и гиперупругие. Расширенные функции включают
технологию суперэлементов (подконструкций), модальный синтез, анализ
динамики
сложных
структур
на
основе
метода
Крейга-Бемптона,
макроязык DMAP для создания пользовательских приложений.
84.
Предусмотрена возможность передачи моделей упругих тел вAdams, которые будут использоваться в этом программном комплексе при
построении расчётных моделей машин и механизмов.
MSC Nastran располагает аппаратом автоматической оптимизации
параметров, формы и топологии конструкций. Возможности оптимизации
позволяют использовать MSC Nastran для автоматической идентификации
компьютерной расчетной модели и планирования экспериментов.
В составе MSC Nastran имеются специальные возможности
моделирования динамики роторных машин, что обуславливает
незаменимость этого программного продукта в отраслях, связанных с
разработкой турбомашин.
MSC Nastran предоставляет возможности расчёта характеристик работы
конструкций из композиционных материалов.
MSC Nastran используется для планирования экспериментов
(определение мест расположения датчиков) и оценки полноты полученных
экспериментальных данных. С помощью MSC Nastran решаются задачи
моделирования систем управления, систем терморегулирования с учетом
воздействия этих систем на конструкцию.
85.
Тесная связь MSC Nastran с системой Patran обеспечиваетполностью
интегрированную
среду
для
моделирования
и
анализа
результатов. Все ведущие производители пре- и постпроцессоров, а также
систем автоматизированного проектирования, предусматривают прямые
интерфейсы с этой системой.
MSC
Nastran
работает
суперкомпьютерах
и
на
ПК,
рабочих
предусматривает
станциях,
возможности
кластерах,
векторной
и
параллельной обработки данных на вычислительных комплексах, которые
поддерживают эти функции.
86.
Patran – это интегрирующая среда систем проектирования,моделирования и анализа на основе современного графического
пользовательского интерфейса.
Patran является интегрирующей средой и графической оболочкой
для MD Nastran, MSC Nastran, Marc, Dytran, Sinda и других конечноэлементных систем анализа. Patran обеспечивает импорт геометрических
моделей из CAD-систем, создание расчетных моделей, запуска их на
расчет, графическое отображение и обработку полученных результатов.
Помимо доступа к стандартным геометрическим форматам, таким
как Parasolid, ACIS, STEP, IGES и др., предоставляет прямой доступ к
программным пакетам автоматизированного проектирования: CATIA v4 и
v5, NX, Pro/ENGINEER.
Возможность использования данных о материалах обеспечивается через
прямой интерфейс с системой Mvision.
При использовании Patran, как правило, именно CAD-геометрия
становится основой конечно-элементной модели. Поэтому Patran включает
в себя специальные методы и функции для контроля и
автоматизированного исправления дефектов, импортированных из CADсистем геометрических моделей, а также преобразования их в расчетные
модели, что при современном уровне сложности и подробности
компьютерных моделей существенно облегчает работу конструкторов и
расчетчиков.
87.
Patran включает в себя обширные функции создания имодификации геометрических моделей, в том числе твердотельное
моделирование (включая Булевы операции), создание срединных
поверхностей, автоматическое распознавание и параметризацию
отверстий, скруглений и фасок.
Наличие инструментария для создания, редактирования и
контроля качества конечно-элементных (КЭ) сеток позволяет в короткое
время создавать оптимальные расчетные модели. Наряду со
стандартными генераторами КЭ сеток в Patran присутствуют
специализированные
генераторы:
SheetBodyMesher,
AdvancedSurfaceMesher
и
др.,
позволяющие
создавать
высококачественные КЭ сетки на наборе поверхностей «плохого» (с точки
зрения генерации КЭ сеток) качества.
В Patran предоставляет обширный набор возможностей для
задания нагрузок, граничных условий, свойств материалов и элементов,
параметров расчета, а также для визуализации, обработки и
преобразования результатов счета. Кроме того, широкие возможности
языка Patran Command Language (PCL) позволяют адаптировать все
упомянутые функции к конкретным требованиям пользователя.
88.
Функции «Группы», «Списки», «Суперэлементы», «Области» и др.дают возможность создавать и обрабатывать полноразмерные подробные
модели сложных изделий, таких как самолет, автомобиль и т.д.,
включающие миллионы конечных элементов.
Наряду с интерфейсами к CAD- и CAE-системам Patran имеет ряд
специальных встроенных приложений:
THERMAL – анализ тепловых процессов и гидравлических сетей;
LAMINATE
MODELER
–
подготовка
моделей
и
обработка
результатов расчетов для конструкций из композитных материалов;
ANALYSIS
MANAGER
–
многофункциональная
позволяющая управлять процессами выполнения заданий.
система,
89.
Autodesk Algor Simulation (Autodesk). Autodesk Algor Simulationобеспечивает решение широкого спектра задач механики деформируемого
твердого тела, гидродинамики, электростатики, а также связанных задач.
Autodesk Algor Simulation – инструмент расчета деталей и сборок
конструкций, который теперь тесно интегрирован с Moldflow 2011, что
позволяет инженерам пользоваться результатами анализа и обширной
библиотекой материалов последнего, чтобы принимать важные решения
на более ранней стадии проекта.
Разнообразие типов конечных элементов, богатые возможности
для построения конечно-элементных сеток и встроенная в Autodesk Algor
Simulation библиотека моделей материалов позволяют создавать
цифровые
прототипы,
эквивалентные
реальным
изделиям.
С
большинством CAD-программ поддерживается прямой ассоциативный
обмен данными, что обеспечивает возможность интерактивно вносить
изменения в проект (в CAD системе) без необходимости снова определять
данные моделирования (в Autodesk Algor Simulation).
Autodesk Algor Simulation поддерживает прямой импорт геометрии
из Autodesk Inventor, Autodesk Mechanical Desktop, IronCAD, KeyCreator,
Pro/ENGINEER, Rhinoceros, Solid Edge, SolidWorks и импорт моделей в
универсальных форматах: ACIS, STEP, IGES, STL.
90.
Marc 2008 (MSC Software). Marc представляет собой универсальнуюконечно-элементную программу для проведения углубленного анализа
высоконелинейного поведения конструкций и решения задач теплопередачи. Marc
также используется для компьютерного моделирования технологических процессов
прокатки, прессования, листового и объемного формования, производства шин,
суперпластического формования и т.д. В Marc доступны также неструктурные типы
анализа: 1) электростатический; 2) магнитостатический; 3) электромагнитный; 4)
акустический; 5) гидродинамический анализ подшипников; 6) теплопередача и ряд
других.
Дополняя возможности MSC Nastran и Dytran, программа позволяет
проводить комплексный анализ ситуаций, когда элементы конструкции
испытывают большие перемещения и повороты, а свойства материалов
существенно нелинейны. Также возможен эффективный анализ сложного
контактного взаимодействия конструкций.
Marc обладает широкими возможностями решения сложных нелинейных
задач. Так, для изучения поведения резиновых уплотнений, строительных
конструкций и некоторых других специальных объектов требуются особые модели
материала. Контакт зубьев шестерен может быть корректно представлен лишь в
том случае, если модель включает в себя соответствующие алгоритмы анализа
контакта.
Множество специальных типов анализа в среде Marc поддерживается
полным
набором
конечно-элементных
формулировок.
Программа
предусматривает применение пользовательских подпрограмм, с помощью которых
упрощается моделирование поведения изделия в особых ситуациях.
91.
AFEA – интегрированное персональное рабочее место на основекомплекса «Patran – Marc». В единой среде графического интерфейса преи постпроцессора Patran пользователь может формировать задачи,
осуществлять их расчет и обрабатывать результаты.
AFEA – комплекс на базе решателя Marc, ориентированный на
решение физически и геометрически нелинейных задач механики, а также
задач
теплопередачи,
включая
связанные
задачи
теплопрочности.
Функциональные возможности решателя Marc (полный набор моделей
материала,
автоматический
трехмерный
контакт,
расчет
больших
пластических и упругих деформаций, циклическое нагружение, глобальное
перестроение сетки, перенос решения из двумерного случая в трехмерный
и т.д.) делают этот продукт высокоэффективным средством исследования
сложного поведения различных конструкций.
92.
SimDesigner – семейство встроенных решений для CAD-системыCATIA V5, обеспечивающее моделирование динамики механизмов и
быстропротекающих по времени существенно нелинейных процессов,
расчет напряженно-деформированного и теплового состояний элементов
конструкции.
SimDesigner создан на основе мощных систем, таких как MD Nastran, Marc,
Adams, LS-DYNA, интегрированных с CATIA V5.