






 electronics
electronicsSimilar presentations:










Робототехника. Следование по линии с подсчетом перекрестков
1. Обнаружение перекрестков
РобототехникаОбнаружение перекрестков
Логинов Андрей Анатольевич
2.
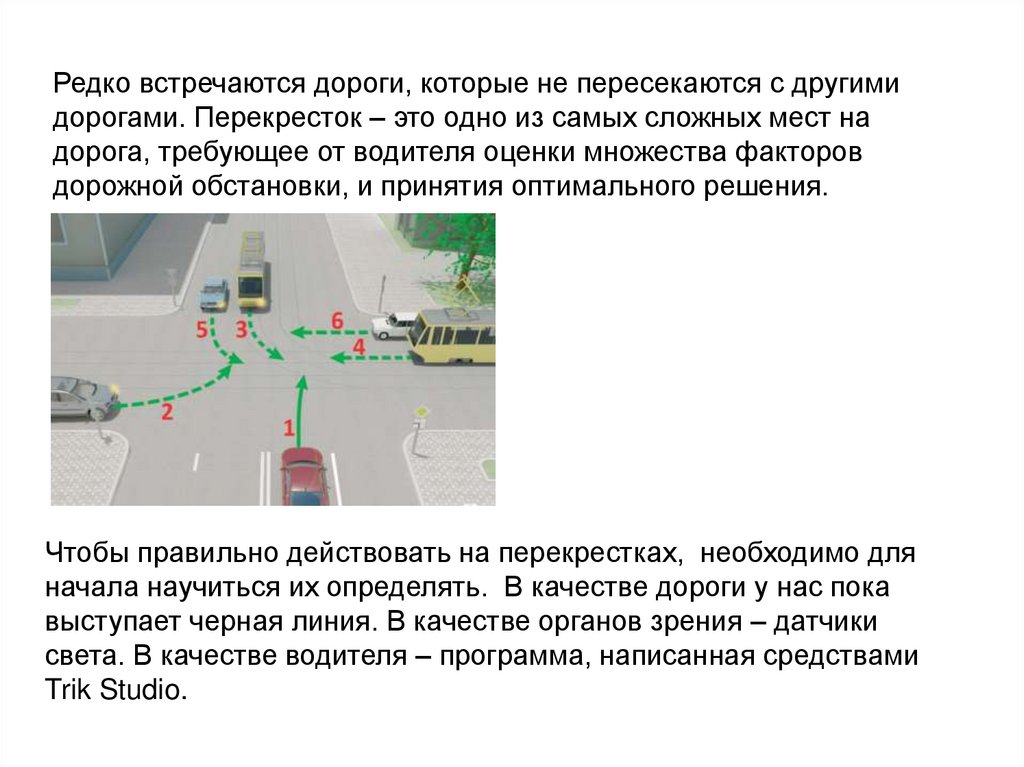
Редко встречаются дороги, которые не пересекаются с другимидорогами. Перекресток – это одно из самых сложных мест на
дорога, требующее от водителя оценки множества факторов
дорожной обстановки, и принятия оптимального решения.
Чтобы правильно действовать на перекрестках, необходимо для
начала научиться их определять. В качестве дороги у нас пока
выступает черная линия. В качестве органов зрения – датчики
света. В качестве водителя – программа, написанная средствами
Trik Studio.
3.
Для робота, двигающегося по линии на двух датчиках света,перекресток – это когда оба датчика находятся над черной
поверхностью.
Это не
перекресток
Это не
перекресток
Это не
перекресток
Это перекресток
4. Если движение по линии осуществляется на основе релейного регулятора, то в нём есть одна ветка, соответствующая одновременному
распознаванию двумя датчиками черного цветаполя:
5.
Что делать роботу, когда он обнаружил перекресток? Он можетпросто его посчитать в переменную и двигаться дальше, а может
выполнить другие действия, не связанные с движением по линии:
Обнуление
счётчика
перекрестков
Место, где робот попал на
перекресток. Он увеличивает
переменную р на 1 и ждет 200
мсек, чтобы успеть выехать за
перекресток
Условие,
где
робот
делает
проверку
на
пятый
перекресток
Робот считает перекрестки и останавливается на пятом.
6.
Для того, чтобы робот, оказавшись на перекрестке, выполнил действия, несвязанные с движением по линии, движение по линии необходимо прервать. Для
этого применяется переменная-флаг. Она может быть только в двух состояниях: 0
или 1. Когда флаг станет 1, цикл закончится.
«Флаг»
устанавлива
ется в 0
Место, где робот попал на
перекресток. Он увеличивает
флаг в 1
Условие,
где
робот
делает
проверку
равенство
флага 1
Лучше всего эту диаграмму поместить в подпрограмму.
7.
В этой программе выполняется проезд до перекрёстка, и затем,разворот. И так бесконечно:
8.
Настройку и отладку робота необходимо проводить на полеFollow_line из коллекции «Картинки». Перекрёстки необходимо
нарисовать вручную инструментом Линия»: