

















")





")


")
")
 electronics
electronics industry
industrySimilar presentations:





")




Классификация регуляторов по виду используемой энергиии
1. КЛАССИФИКАЦИЯ РЕГУЛЯТОРОВ ПО ВИДУ ИСПОЛЬЗУЕМОЙ ЭНЕРГИИИ
1.Регуляторы прямого действияРегуляторы прямого
действия для перемещения
регулирующего органа не
используют внешних
источников энергии, а
используют только энергию
регулируемой среды.
Н Е Д О С Т А Т О К:
Сравнительно низкая
чувствительность (зона
нечувствительности 1 – 3 % от
регулируемой величины)
2.Регуляторы косвенного
(непрямого) действия
Используют внешние
источники энергии. Делятся
на 4 группы:
- электрические;
- гидравлические;
- пневматические;
- комбинированные.
Н Е Д О С Т А Т О К:
Необходим источник энергии
(блок питания, насосная
станция, компрессор).
2.
3. Регуляторы перепада давления прямого действия для систем теплоснабжения фирмы Danfoss, Дания
4. РЕГУЛЯТОР ПЕРЕПАДА ДАВЛЕНИЯ ПРЯМОГО ДЕЙСТВИЯ
5. РЕГУЛЯТОР ТЕМПЕРАТУРЫ ПРЯМОГО ДЕЙСТВИЯ
6. Регуляторы температуры прямого действия фирмы Danfoss
7. РЕГУЛИРОВАНИЕ ТЕМПЕРАТУРЫ ВОДЫ В ТЕПЛООБМЕННИКЕ
8. РЕГУЛИРОВАНИЕ ТЕМПЕРАТУРЫ ВОДЫ
9. РЕГУЛЯТОР ДАВЛЕНИЯ ГАЗА ПРЯМОГО ДЕЙСТВИЯ
10. Регуляторы давления прямого действия РД-НО-50, РА,
11. Регуляторы давления прямого действия AFP, РА,
12. РЕГУЛЯТОРЫ ЭЛЕКТРИЧЕСКОГО ДЕЙСТВИЯ
1.2.
3.
В автоматике в основном используются
электродвигательные и электромагнитные электрические
исполнительные механизмы (ИМ).
Электродвигательные ИМ более распространены, делятся на:
Однооборотные (вал поворачивается на угол менее 360 град);
Многооборотные (вал поворачивается на угол более 360 град);
Прямоходные (шток перемещается поступательно).
Электромагнитные ИМ имеют электромагнит постоянного или
переменного тока, срабатывающий при прохождении
электрического тока.
13.
14. РЕГУЛЯТОРЫ ЭЛЕКТРИЧЕСКОГО ДЕЙСТВИЯ
Достоинства:-
-
Большой радиус действия;
Централизованный источник
питания;
Независимость характеристик
от температуры и давления;
Легкость монтажа и
демонтажа;
Простота сопряжения с ЭВМ;
Стандартность основных
деталей.
Недостатки:
-
-
Малая возможность плавного
регулирования скорости ИМ;
Пониженная надежность
некоторых устройств из-за
наличия контактов;
Сравнительная сложность
наладки и эксплуатации;
Ограниченная применимость
в пожаро- и взрывоопасных
помещениях и производствах.
15. ВНЕШНИЙ ВИД МЕХАНИЗМОВ МЭО
16. ВНЕШНИЙ ВИД МЕХАНИЗМОВ ЭЛЕКТРИЧЕСКИХ МНОГООБОРОТНЫХ И ПРЯМОХОДНЫХ
Механизм МЭМ
Механизм МЭП
17. СТРУКТУРА УСЛОВНОГО ОБОЗНАЧЕНИЯ ИСПОЛНИТЕЛЬНЫХ МЕХАНИЗМОВ МЭО
МЭО - ммм / хх - ввв д гг
ммм - номинальный крутящий момент на выходном валу в Н*м
хх - номинальное значение времени полного хода в секундах
ввв - номинальное значение полного хода выходного органа в
оборотах
д - тип датчика сигнализации положения выходного вала: И индуктивный (БСПИ), Р - резистивный (БСПР), У - токовый
(БСПТ)
гг - год разработки.
ПРИМЕР:
МЭО – 40/63 – 0,25 И 94. Масса механизма 27,5 кг. Питание
от сети 220 В, 50 Гц.
18.
Номенклатура однооборотных механизмов и приводов МЭОТип
привод
а
МЭО6.3
МЭО40
Крутящий
момент, Нм
Номинальное
время полного
хода, с
Номин.
значение
полного
хода, об.
6.3; 12.5;
16; 25
12.5; 25; 30; 63
6.3; 16; 40
10; 25; 63; 160
Напряжение
(частота питания)
Масса,
не
более,
кг
Габаритные
размеры,
не более, мм
0.25
220, 230, 240 В
(50 Гц)
3.9
195x175x114
0.25; 0.63
220, 230, 240 В
(50 Гц);
380, 400, 415 В
(50 Гц)
6.5; 7.6;
8; 8.5
230x200x185
27; 27.5;
30.5
440x315x305
МЭО250
40; 100; 250
10; 25; 63; 160
0.25; 0.63
220, 230, 240 В
(50 Гц);
380, 400, 415 В
(50 Гц)
МЭО630
250; 630
10; 25; 63; 160
0.25; 0.63
220/380, 230/400,
240/415 В (50 Гц)
74
445x452x402
МЭО1600
630; 1600
10; 25; 63; 160
0.25; 0.63
220/380, 230/400,
240/415 В (50 Гц)
135
495x515x467
МЭО4000
4000
63; 160
0.25; 0.63
220/380, 230/400,
240/415 В (50 Гц)
270
590x670x605
МЭО10000
10000
63; 160
0.25; 0.63
220/380, 230/400,
240/415 В (50 Гц)
580
990x850x600
19. Пневматические регуляторы (используют поршневые и мембранные ИМ)
• Достоинства:-
-
Плавное регулирование
скорости ИМ;
Не требуются обратные
трубопроводы (в сравнении с
гидравлическими);
Сравнительно большой
радиус действия;
Пожаро- и
взрывобезопасность.
• Недостатки:
-
-
-
Нужны компрессоры,
фильтры и влагопоглотители;
Рабочие характеристики
зависят от температуры и
давления;
Нечувствительность к
небольшим импульсам;
Повышенная инерционность
регулятора при длинных
соединительных линиях;
Для сопряжения с ЭВМ нужны
специальные устройства.
20. Гидравлические регуляторы
• Достоинства:-
-
-
Высокая надежность;
Широкий диапазон плавного
регулирования скорости ИМ;
Значительные
перестановочные усилия при
небольших размерах;
Простота эксплуатации;
Высокий к.п.д.
• Недостатки:
-
-
-
Небольшой радиус действия;
Огнеопасность;
Зависимость рабочих
характеристик от
температуры;
Необходимость иметь
рабочие и резервные насосы;
Повышенная инерционность
регулятора при длинных
соединительных линиях.
Для сопряжения с ЭВМ нужны
специальные устройства;
21. КОМБИНИРОВАННЫЕ РЕГУЛЯТОРЫ
• Пример: Позиционер электропневматический ЭПП.Предназначен для высокоточного управления поршневыми и
мембранными пневматическими ИМ за счет введения жесткой
обратной связи по положению ИМ.
22. Электро-гидравлический Регулятор расхода Yuken
23. ОБЩАЯ ФУНКЦИОНАЛЬНАЯ СХЕМА КОНТУРА РЕГУЛИРОВАНИЯ
24. ПРИМЕР ФУНКЦИОНАЛЬНОЙ СХЕМЫ ДВУХКОНТУРНОЙ СИСТЕМЫ РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ
1 сигнал на открытиеU (t ) 0 положение заслонки
не
1 сигнал на
закрытие
заслонки ;
меняется;
заслонки .
25. СТРУКТУРНАЯ СХЕМА СИСТЕМЫ РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ (КАСКАДНОЕ РЕГУЛИРОВАНИЕ)
26. СХЕМА ВВОДА АНАЛОГОВЫХ СИГНАЛОВ В ПЛК
27. Устройство выборки-хранения
28. Устройство выборки-хранения ИМС LF398 (отечественный аналог - 1100СК2)
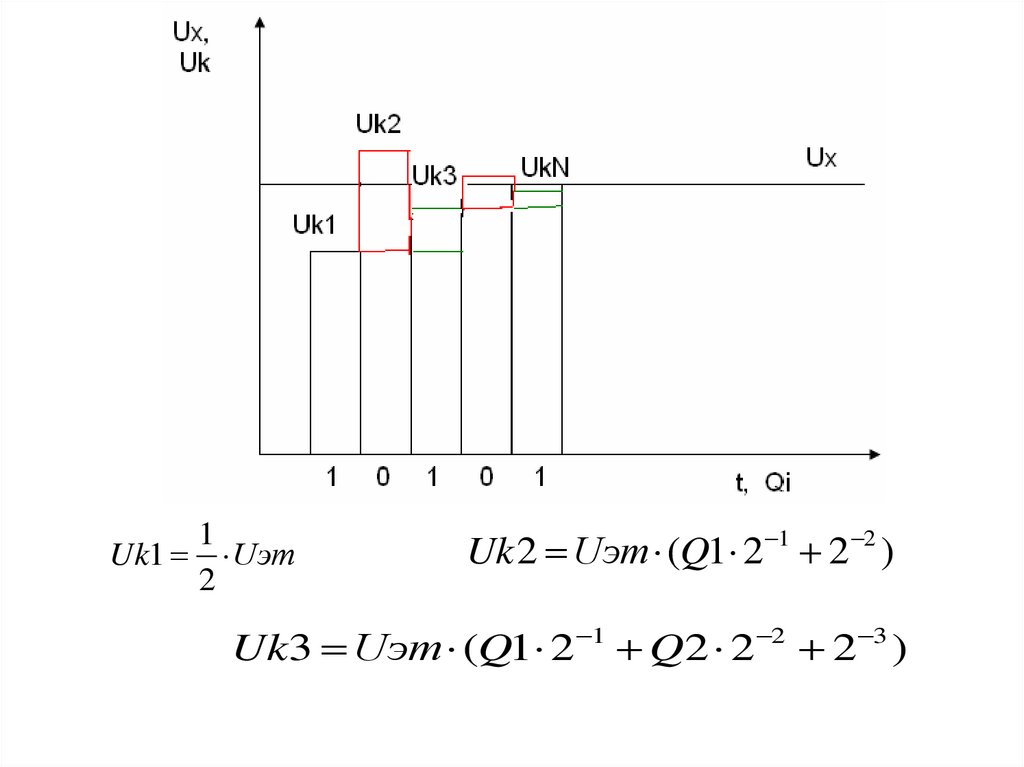
29. АЦП поразрядного уравновешивания (последовательного приближения)
30.
1Uk1 Uэт
2
Uk 2 Uэт (Q1 2 1 2 2 )
Uk3 Uэт (Q1 2 1 Q2 2 2 2 3 )