

 различных элементов объекта в единое целое (систему).")

 - все входные, выходные величины и параметры состояний являются непрерывными во времени,")

 системы - Все входные, выходные величины и параметры состояний могут принимать только дискретные значения")














 industry
industrySimilar presentations:










Понятие синтеза. Разработка систем автоматического управления технологическими процессами
1. Автоматизация технологических процессов
Модуль 2. Лекция 2. Понятие синтеза.Разработка систем автоматического
управления технологическими процессами
2. План
1.2.
3.
4.
Понятие синтеза
Методика разработки алгоритма
управления технологическими процессами
Методика разработки структуры
управления
Реализация структуры управления на ПЛК
18.12.2019
АТП Кафедра АСУП БГАТУ
2
3. Синтез — соединение (мысленное или реальное) различных элементов объекта в единое целое (систему).
Синтез систем автоматического управления,как раздел автоматики, рассматривает методы
автоматического (автоматизированного)
проектирования различных систем управления с
заданными свойствами при ограниченных
исходных данных, собственно реализации таких
методов.
18.12.2019
АТП Кафедра АСУП БГАТУ
3
4. Синтез САУ включает три основных этапа:
На первом этапе разрабатывается математическаямодель проектируемой (синтезируемой) системы.
На втором этапе на основе математической модели
составляется целевая функция или критерий оптимальности,
математически сформулированная цель синтеза САУ.
На третьем этапе разрабатываются способы технической
реализации выбранного варианта системы, полученного в
виде общих математических зависимостей (рекомендаций),
т.е. составляются функциональные, структурные,
динамические, принципиальные, монтажные и другие
схемы.
18.12.2019
АТП Кафедра АСУП БГАТУ
4
5. Аналоговые (непрерывные системы) - все входные, выходные величины и параметры состояний являются непрерывными во времени,
изменяемыми сигналамиСпособ
Методы моделирования
описания алгоритма:
:
Линейные
(векторные)
обычныеинтеграл
и
Преобразование
Лапласа,
дифференциальные
уравнения
в частных
сверстки, аналоговое
и цифровое
производных,
дробные рациональные
моделирование
передаточные функции, пространственное
изображение
Фазовая плоскость,
состояний.аналоговое,
цифровое и (векторные)
гибридное дифференциальные
моделирование
Нелинейные
уравнения, описательная функция,
пространственное изображение состояний
18.12.2019
АТП Кафедра АСУП БГАТУ
5
6. Системы импульсного регулирования - входные и выходные величины являются дискретными во времени
Методымоделирования
:
Способ описания алгоритма:
Дискретное преобразование Лапласа,
Дифференциальные
(векторные)
сумма сверстки, гибридное
и
уравнения,
трансцендентные
цифровое моделирование
передаточные функции
18.12.2019
АТП Кафедра АСУП БГАТУ
6
7. Дискретные (двоичные) системы - Все входные, выходные величины и параметры состояний могут принимать только дискретные значения
Дискретные (двоичные) системы Все входные, выходные величиныи параметры состояний могут
принимать только дискретные
значения
Методы моделирования
Способ
описания :алгоритма:
Дискретные
преобразование
Лапласа,
Булева
алгебра,
теория автоматов,
сумма свертки, интеграл Лапласа,
Дифференциальные
(векторные)
цифровое моделирование
уравнения, пространственное
изображение состояний, Марковские
процессы, таблицы автоматов, графы
состояний, логические таблицы
18.12.2019
АТП Кафедра АСУП БГАТУ
7
8.
Методика разработки структуры управления поточнойтехнологической линией на основе символической записи
алгоритма
Разработку схемы автоматизации
начинают с разработки алгоритма
управления, в процессе чего
определяется объем автоматизации.
Алгоритм управления – предписание, в
соответствии с которым осуществляется
решение задачи управления.
18.12.2019
АТП Кафедра АСУП БГАТУ
8
9. Раздача корма с помощью мобильного рельсового кормораздатчика
18.12.2019АТП Кафедра АСУП БГАТУ
9
10. Элементы САУ ПТЛ:
Устройство управления — обеспечиваеткоординацию действий всех устройств
системы автоматического управления
(САУ) в соответствии с алгоритмом.
Командные приборы преобразуют
неэлектрические и электрические величины в
сигналы.
Устройство управления — обеспечивает
координацию действий всех устройств системы
автоматического управления (САУ) в
соответствии с алгоритмом.
18.12.2019
АТП Кафедра АСУП БГАТУ
10
11. Для формализации алгоритма ТП применяют буквенные обозначения элементов САУ :
a1, а2, а3, ..., аn – исполнительные элементыкомандных приборов ручного воздействия;
в1, в2, в3, ..., вn – исполнительные элементы
командных приборов технологического воздействия;
х1, х2, х3, ..., хn – воспринимающие элементы
исполнительных устройств;
Z1, Z2, Z3, ..., Zn – привода реле времени;
z 1, z 2, z 3, ..., z n – исполнительные элементы реле
времен (как командного прибора);
z с – контакт суточного реле времени.
18.12.2019
АТП Кафедра АСУП БГАТУ
11
12. И обозначения операций над элементами САУ
18.12.2019АТП Кафедра АСУП БГАТУ
12
13. Схема расположения командных приборов и исполнительных устройств
18.12.2019АТП Кафедра АСУП БГАТУ
13
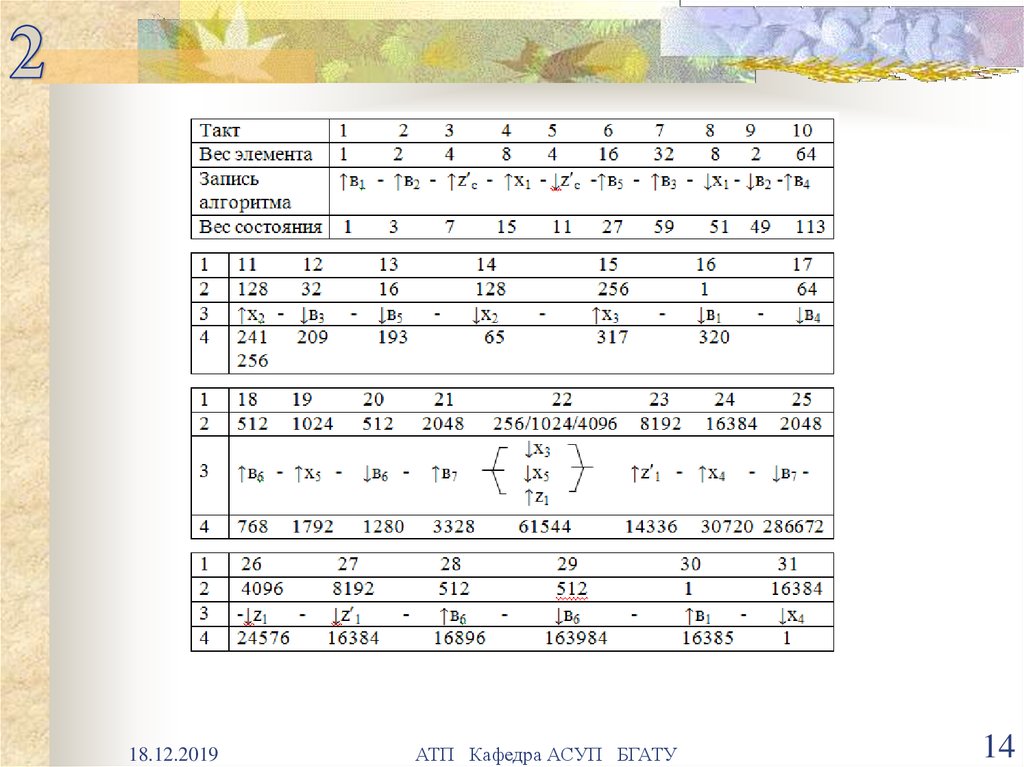
14.
18.12.2019АТП Кафедра АСУП БГАТУ
14
15. Частные таблицы включения
,f ( x) f ср ( x) X f отп ( x)
18.12.2019
АТП Кафедра АСУП БГАТУ
15
16. Таблица покрытия
18.12.2019АТП Кафедра АСУП БГАТУ
16
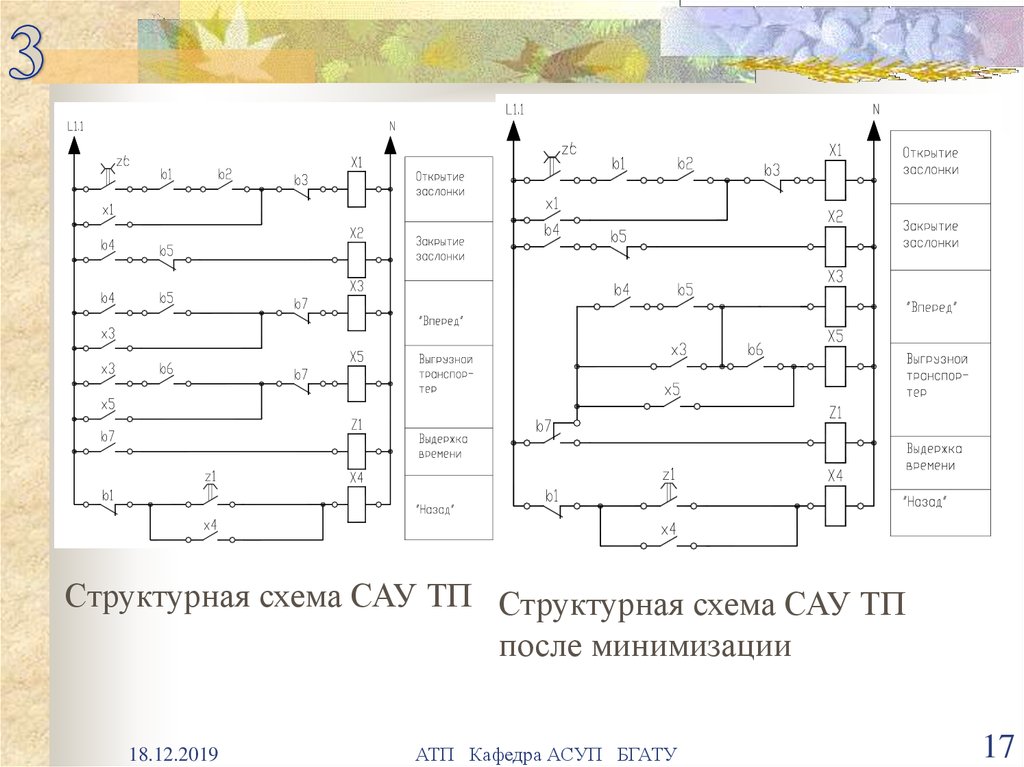
17.
Структурная схема САУ ТП Структурная схема САУ ТПпосле минимизации
18.12.2019
АТП Кафедра АСУП БГАТУ
17
18. Языки программирования ПЛК:
язык последовательных функциональныхсхем – Sequential Function Chart – SFC;
язык функциональных блоковых диаграмм –
Function Block Diagram – FBD;
язык релейно-контактной логики – Ladder
Diagram – LD
список инструкций – Instruction List – IL;
структурированный текст – Structured Text –
ST
18.12.2019
АТП Кафедра АСУП БГАТУ
18
19.
Ï î äêëþ ÷åí èå äàò÷èêî âÑåòü
ï èòàí èÿ
~220Â
Ï î ëî æåí èå
êî ðì î ðàçäàò÷èêà ï î ä
áóí êåðî ì
Êî ðì
â áóí êåðå
Çàäâèæêà
î òêðû òà
Êî ðì
â ðàçäàò÷èêå
Çàäâèæêà
çàêðû òà
Í à÷àëî
êî ðì óø åê
Êî í åö
êî ðì óø åê
Ï èòàí èå
êî í òðî ëëåðà
Âõî äû
êî í òðî ëëåðà
Âû õî äû
êî í òðî ëëåðà
î òêðû òèÿ
çàñëî í êè
Ñèãí àë í à óï ðàâëåí èå ï ðèâî äî ì
çàêðû òèÿ
äâèæåí èÿ ðàçäàò÷èêà
çàñëî í êè
âï åðåä
í àçàä
âû ãðóçí î ãî
òðàí ñï î ðòåðà
Схема подключения α-контроллера для реализации управления
кормораздачей
19
18.12.2019
АТП Кафедра АСУП БГАТУ
20. Программирование на FBD:
18.12.2019АТП Кафедра АСУП БГАТУ
20
21. Программирование ПЛК
18.12.2019АТП Кафедра АСУП БГАТУ
21
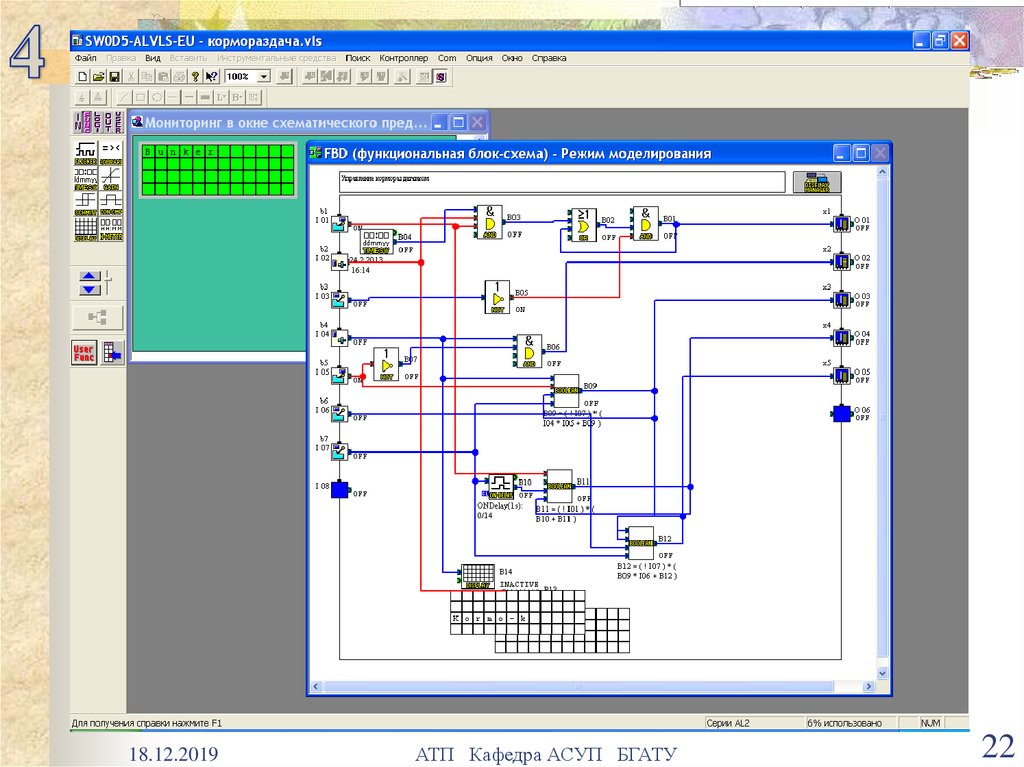
22.
18.12.2019АТП Кафедра АСУП БГАТУ
22
23. Программирование на РКЛ:
18.12.2019АТП Кафедра АСУП БГАТУ
23
24. Программирование на РКЛ:
18.12.2019АТП Кафедра АСУП БГАТУ
24