")






 electronics
electronicsSimilar presentations:
")









Автоматизована система керування блоком живлення промислового робота-маніпулятора з сервоприводами постійного струму (АКБ)
1. Автоматизована система керування блоком живлення промислового робота-маніпулятора з сервоприводами постійного струму (АКБ)
Кременчуцький національний університет іменіМихайла Остроградського
Кафедра автоматизації та інформаційних систем
Випускна робота бакалавра
на тему:
Автоматизована система керування блоком
живлення промислового робота-маніпулятора з
сервоприводами постійного струму (АКБ)
Керівник: к.т.н., доц. Конох І. С.
Виконав: студент групи АКІТ-16-2с
Площенко Д. О.
Слайд 1
2.
Мета роботи: Автоматизація процесів енергоживленнясервоприводів постійного струму робота-маніпулятора.
Завдання роботи:
• моделювання електромеханічних процесів та визначення
параметрів роботи системи захисту блоку живлення;
• вибір апаратних компонент, які забезпечують задані
технічні вимоги до системи керування;
• розробка схемних рішень
• розробка алгоритмічного забезпечення системи;
• розробка програмного забезпечення системи.
Вимоги до системи:
базовий варіант робота-маніпулятора: ТУР-10
двигуни: ПЯ-250
ном. струм двигуна, А – 8,7;
кратність пускового струму – 3
ном. напруга, В – 36
ступенів свободи робота/кількість одночасно увімкнених, од. – 4/2
захист – максимально струмовий, тепловий
2
3.
Характеристики промислового робота3
Технічні характеристики "ТУР-10"
Число степенів рухливості
5
Тип пристрою, що управляє
позиційне
Об'єм оперативної пам'яті
100 кадрів
Споживана потужність,кВт
4
Маса маніпулятора,кг
230
Вантажопідйомність, кг
10
Число мір рухливості
5
Максимальний вертикальний хід
руки, мм
Максимальний кут повороту
плеча, град
Максимальний кут повороту
ліктя, град
Максимальний кут повороту
захвату, град
Максимальна швидкість
вертикального переміщення
руки, м/с
Максимальна швидкість повороту
плеча, град/с
Максимальна швидкість повороту
ліктя, град/с
Точність позиціонування, мм
400
Зовнішній вигляд робота ТУР-10
200
140
+180
0,5
90
120
+0,05... +0,08
Траєкторії руху промислового робота
4.
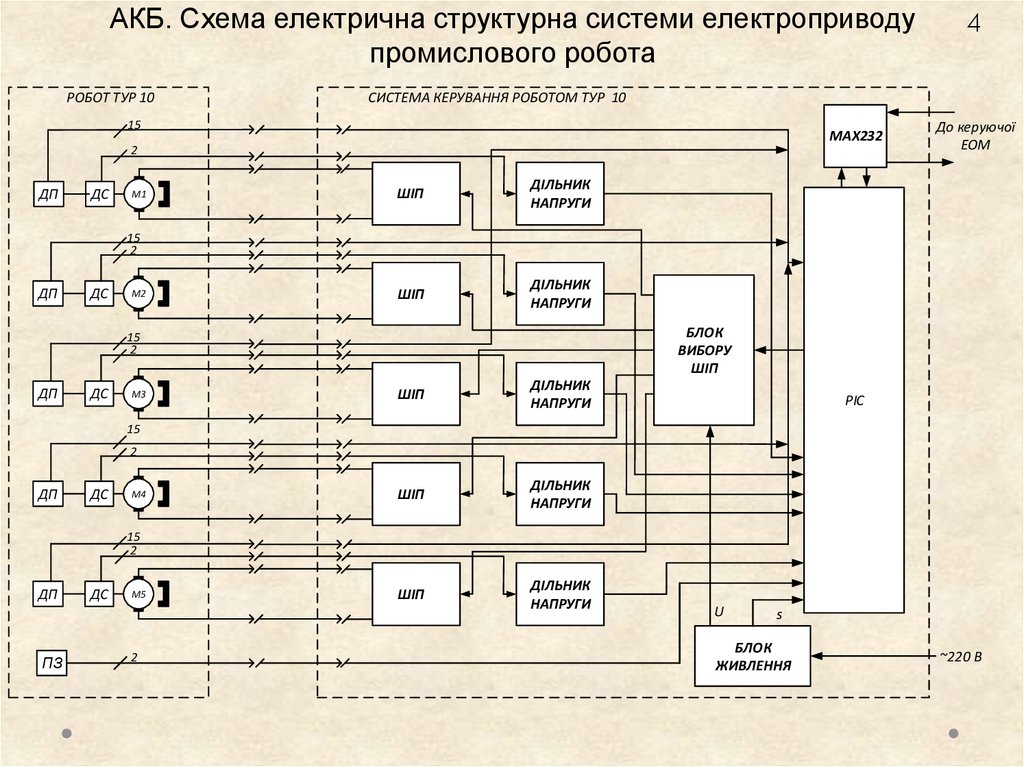
АКБ. Схема електрична структурна системи електроприводупромислового робота
РОБОТ ТУР 10
СИСТЕМА КЕРУВАННЯ РОБОТОМ ТУР 10
15
MAX232
2
ДП
ДС
М1
4
ШІП
ДІЛЬНИК
НАПРУГИ
ШІП
ДІЛЬНИК
НАПРУГИ
До керуючої
ЕОМ
15
2
ДП
ДС
М2
БЛОК
ВИБОРУ
ШІП
15
2
ДП
ДС
М3
ШІП
ДІЛЬНИК
НАПРУГИ
ШІП
ДІЛЬНИК
НАПРУГИ
ШІП
ДІЛЬНИК
НАПРУГИ
PIC
15
2
ДП
ДС
М4
15
2
ДП
ПЗ
ДС
М5
2
U
s
БЛОК
ЖИВЛЕННЯ
~220 В
5.
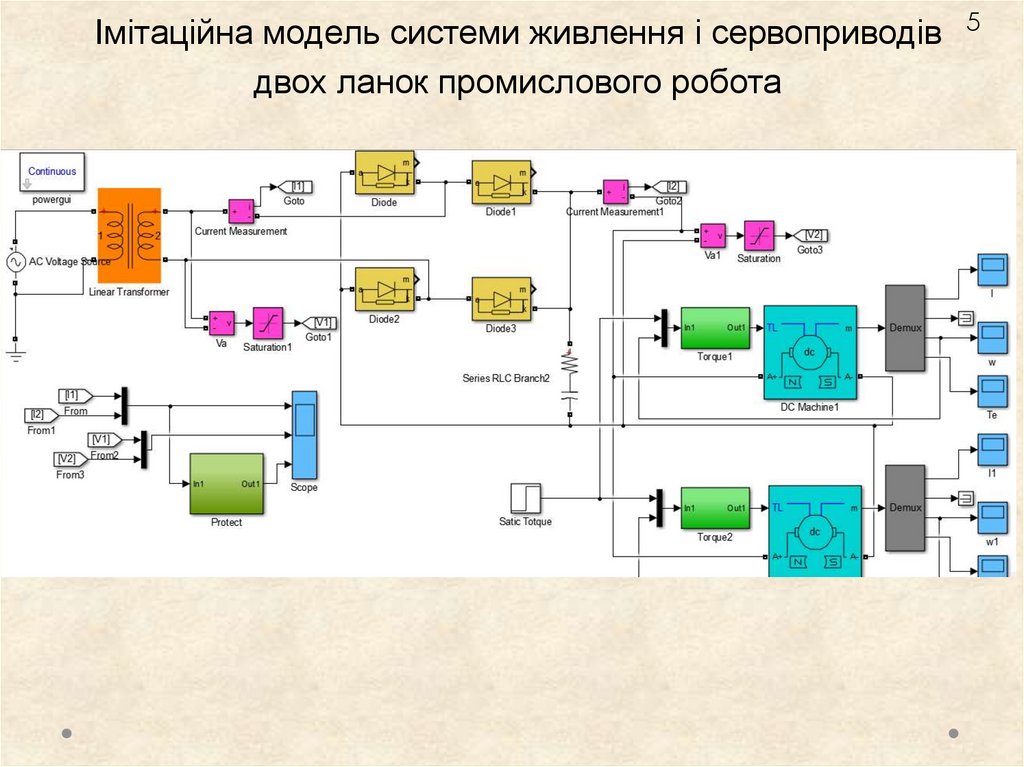
Імітаційна модель системи живлення і сервоприводівдвох ланок промислового робота
5
6.
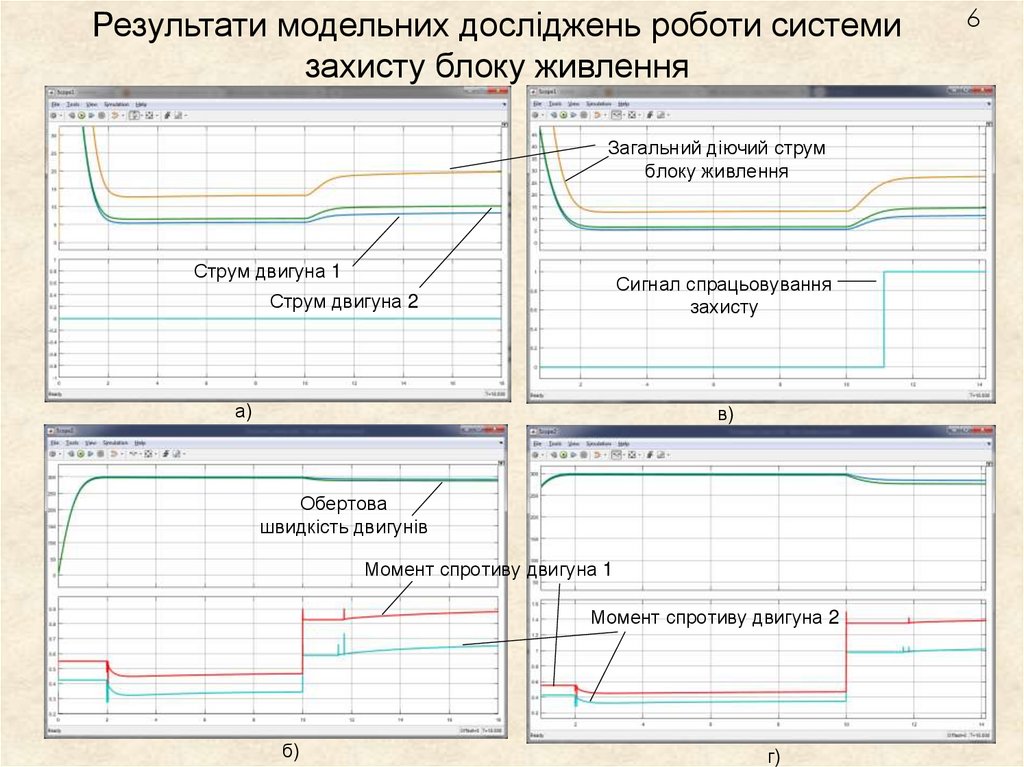
Результати модельних досліджень роботи системизахисту блоку живлення
Загальний діючий струм
блоку живлення
Струм двигуна 1
Сигнал спрацьовування
захисту
Струм двигуна 2
а)
в)
Обертова
швидкість двигунів
Момент спротиву двигуна 1
Момент спротиву двигуна 2
б)
г)
6
7.
АКБ. Система керування. Схема електрична з'єднаньШИП1 XS1
Цепь
к ДПТ
к ДПТ
+U сила
+U сила
~U су(24)
~U су(24)
-U сила
-U сила
~U су(24)
~U су(24)
U шим
Реверс
+5В
GND
Конт
1
2
3
4
5
6
7
8
9
10
11
12
13
14
ШИП2 XS1
Цепь
к ДПТ
к ДПТ
+U сила
+U сила
~U су(24)
~U су(24)
-U сила
-U сила
~U су(24)
~U су(24)
U шим
Реверс
+5В
GND
Конт
1
2
3
4
5
6
7
8
9
10
11
12
13
14
ШИП3 XS1
Цепь
к ДПТ
к ДПТ
+U сила
+U сила
~U су(24)
~U су(24)
-U сила
-U сила
~U су(24)
~U су(24)
U шим
Реверс
+5В
GND
ШИП4 XS1
Конт
1
2
3
4
5
6
7
8
9
10
11
12
13
14
Цепь
к ДПТ
к ДПТ
+U сила
+U сила
~U су(24)
~U су(24)
-U сила
-U сила
~U су(24)
~U су(24)
U шим
Реверс
+5В
GND
Конт
1
2
3
4
5
6
7
8
9
10
11
12
13
14
ШИП5 XS1
Цепь
к ДПТ
к ДПТ
+U сила
+U сила
~U су(24)
~U су(24)
-U сила
-U сила
~U су(24)
~U су(24)
U шим
Реверс
+5В
GND
Конт
1
2
3
4
5
6
7
8
9
10
11
12
13
14
7
Конт
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
Р2
Конт
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
Р2
Цепь
XS1
Цепь
XS1
P3
Конт
1
2
3
XS3
Цепь
ПУ
XS1
Конт
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
Цепь
D0
D1
D2
D3
D4
D5
D6
D7
D14
D13
D12
D10
D11
D8
D9
Uшим1
Uшим2
Uшим3
Uшим4
Uшим5
Выб.ДП1
Выб.ДП2
Выб.ДП3
Выб.ДП4
Выб.ДП5
Реверс
Аналог.1
Аналог.2
Аналог.3
Аналог.4
Аналог.5
Аналог.6
Аналог.7
Аналог.8
GND
GND
+5in
+5in
8.
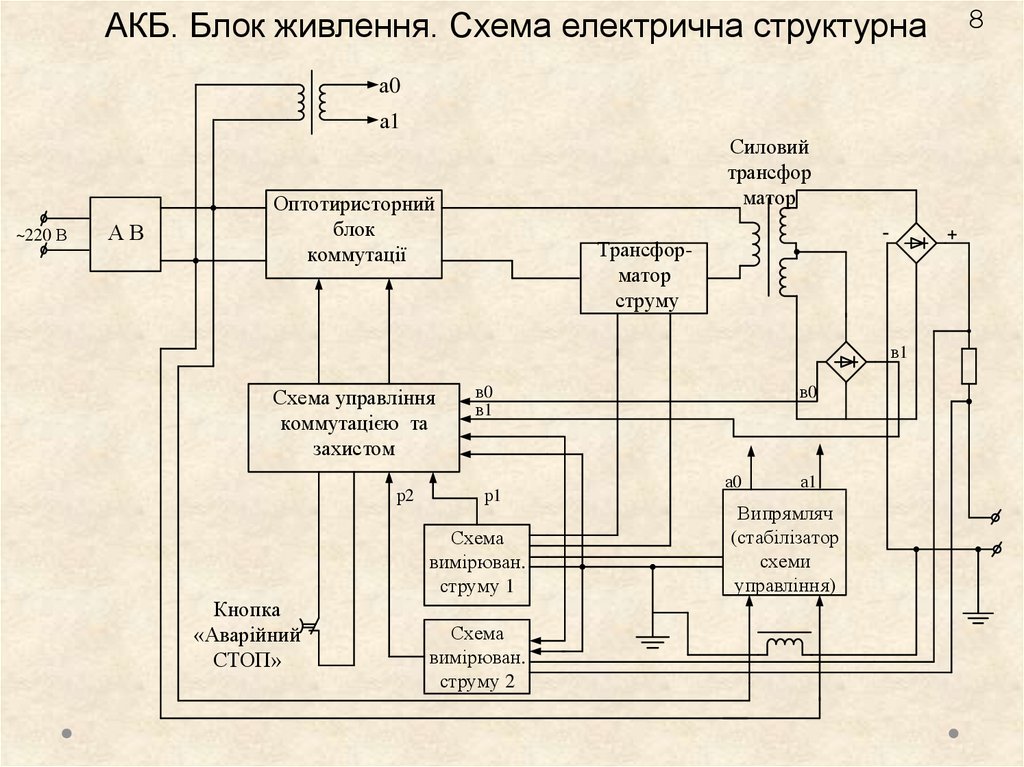
8АКБ. Блок живлення. Схема електрична структурна
а0
а1
~220 В
АВ
Силовий
трансфор
матор
Оптотиристорний
блок
коммутації
-
Трансформатор
струму
+
в1
Схема управління
коммутацією та
захистом
р2
в0
в1
р1
Схема
вимірюван.
струму 1
Кнопка
«Аварійний
СТОП»
Схема
вимірюван.
струму 2
в0
а0
а1
Випрямляч
(стабілізатор
схеми
управління)
9.
9АКБ. Блок живлення. Схема електрична принципова
C
VD
VD
Vcc
C
VD
DA
1
DA
2
C
C
DA
R
VD
In
SD
+
R
VD
DA
C
+
R
C
+
R
C
R
ШИП1 XS1
Цепь
к ДПТ
к ДПТ
+U сила
+U сила
~U су(24)
~U су(24)
-U сила
-U сила
~U су(24)
~U су(24)
U шим
Реверс
+5В
GND
Конт
1
2
3
4
5
6
7
8
9
10
11
12
13
14
Д1.1
Д1.2
+Uдв
+Uдв
VD
VD
VD
VD
-
+
R
VT1
VT2
R
-Uдв
-Uдв
R
КМ
1
GND
VD
VD
Д1.2
-Uдв
Д1.1
-
+
Uшим
VD
VD
DA
R
C
DA
R
C
R
C
VD
VD
VD
C
VD
DA
R
1
DA
C
2
3
R
5
6
7
8
R
4
C
R
VD
C
Vcc
IN
SD
COM
Vb
HO
Vs
LO
C
R
R
R
4
C
R
R
5
6
7
8
3
VD
C
+
+Uдв
To
load
10.
АКБ. Алгоритм роботи мікроконтролерноїсистеми захисту блоку живлення
Початок
1
Ініціалізація векторів,
скидання, ініціалізації,
переривання
Установка
значення 1,2,6
каналів в порту Б
на вихід
Відстежування
зовнішнього
переривання
Установка
прапорів стопів,
сповіщення
системи про
переривання від
1 компоратора
Відстежування
переривання від 1
компоратора
Установка
прапорів стопів,
сповіщення
системи про
переривання від
2 компоратора
Відстежування
переривання від 2
компоратора
Скидання
таймера
Відстежування
переривання від
таймера
Ініціалізація
регістрів прапорів
Налаштування
конфігураційних
бітів
Налаштування і
включення ШІМ
Налаштування і
включення
модулів
компораторів
2
Установка
значення 1,2,6
каналів в порту Б
на вихід
Перевірка
прапорів
стопів
Установка
значення 1,2,6
каналів в порту Б
на вхід
1
2
10
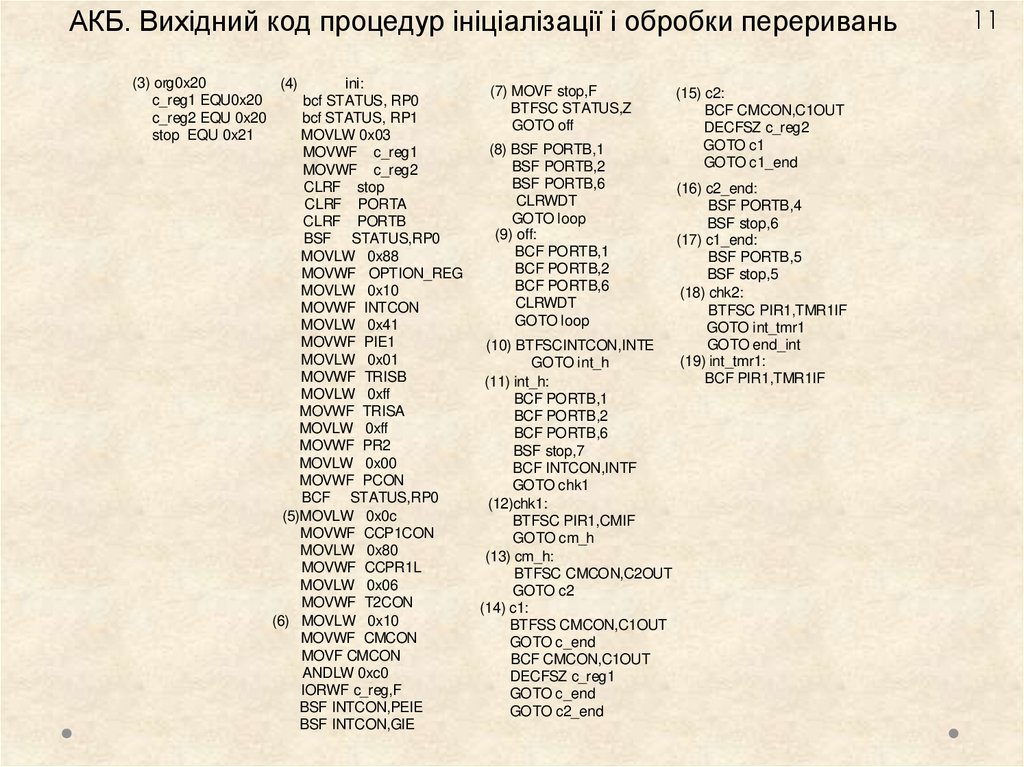
11.
АКБ. Вихідний код процедур ініціалізації і обробки переривань(3) org0x20
(4)
іnі:
c_reg1 EQU0x20
bcf STATUS, RP0
c_reg2 EQU 0x20
bcf STATUS, RP1
stop EQU 0x21
MOVLW 0x03
MOVWF c_reg1
MOVWF c_reg2
CLRF stop
CLRF PORTA
CLRF PORTB
BSF STATUS,RP0
MOVLW 0x88
MOVWF OPTION_REG
MOVLW 0x10
MOVWF INTCON
MOVLW 0x41
MOVWF PIE1
MOVLW 0x01
MOVWF TRISB
MOVLW 0xff
MOVWF TRISA
MOVLW 0xff
MOVWF PR2
MOVLW 0x00
MOVWF PCON
BCF STATUS,RP0
(5)MOVLW 0x0c
MOVWF CCP1CON
MOVLW 0x80
MOVWF CCPR1L
MOVLW 0x06
MOVWF T2CON
(6) MOVLW 0x10
MOVWF CMCON
MOVF CMCON
ANDLW 0xc0
IORWF c_reg,F
BSF INTCON,PEIE
BSF INTCON,GIE
(7) MOVF stop,F
BTFSC STATUS,Z
GOTO off
(8) BSF PORTB,1
BSF PORTB,2
BSF PORTB,6
CLRWDT
GOTO loop
(9) off:
BCF PORTB,1
BCF PORTB,2
BCF PORTB,6
CLRWDT
GOTO loop
(10) BTFSCINTCON,INTE
GOTO int_h
(11) int_h:
BCF PORTB,1
BCF PORTB,2
BCF PORTB,6
BSF stop,7
BCF INTCON,INTF
GOTO chk1
(12)chk1:
BTFSC PIR1,CMIF
GOTO cm_h
(13) cm_h:
BTFSC CMCON,C2OUT
GOTO c2
(14) c1:
BTFSS CMCON,C1OUT
GOTO c_end
BCF CMCON,C1OUT
DECFSZ c_reg1
GOTO c_end
GOTO c2_end
(15) c2:
BCF CMCON,C1OUT
DECFSZ c_reg2
GOTO c1
GOTO c1_end
(16) c2_end:
BSF PORTB,4
BSF stop,6
(17) c1_end:
BSF PORTB,5
BSF stop,5
(18) chk2:
BTFSC PIR1,TMR1IF
GOTO int_tmr1
GOTO end_int
(19) int_tmr1:
BCF PIR1,TMR1IF
11
12. Висновки :
• Результати моделювання наочно демонструють коректністьзапропонованих рішень щодо застосування трансформаторного
сенсору струму з коефіцієнтом
0,01 В/1 А і вимірювальним підсилювачем.
• Реалізація алгоритму роботи блоку захисту демонструє
формування сигналу вимикання навантаження при перевищенні
струму на 20 % відносно максимально допустимого для даного
трансформатору (25 А). Також сигнал вимикання навантаження
успішно формується при 3 % перевищенні номінального струму
на протязі 80 секунд.
• Період вимірювання теплового перевантаження в 120 секунд є
достатнім для умов функціонування системи живлення.
• Результати моделювання показали, що до функцій систем
керування електроприводу повинні входити функції обмеження
кутового прискорення валу двигуна для запобігання появи
високих динамічних струмів. Задача вирішується шляхом
застосування шіротно-імпульсних перетворювачів напруги з
процедурами плавної зміни довжини імпульсів.
12