




")










")















 programming
programmingSimilar presentations:
")









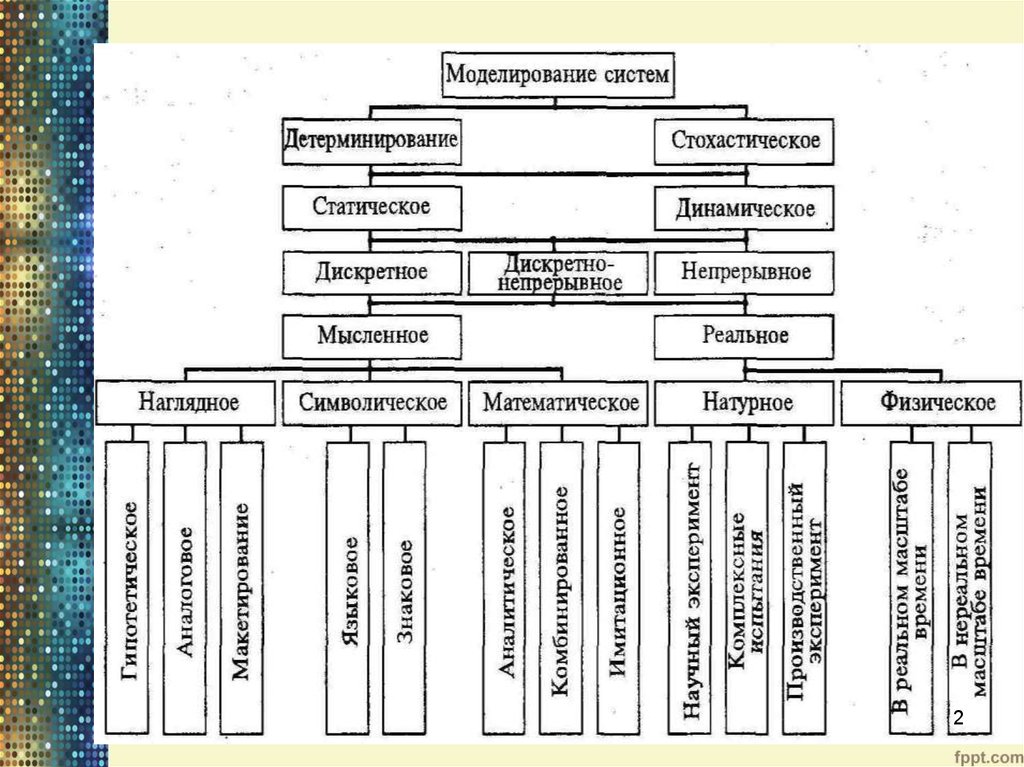
Компьютерное моделирование
1. КОМПЬЮТЕРНОЕ МОДЕЛИРОВАНИЕ
СЕМЕСТР 8РУДЕНКО М.А.
2.
23.
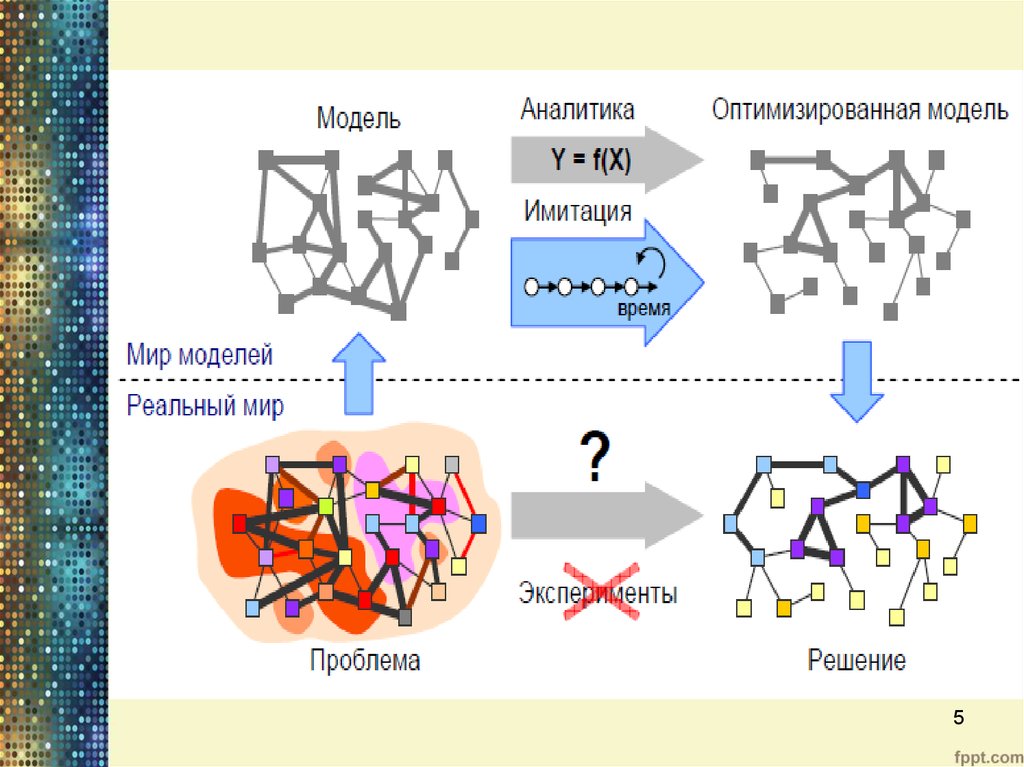
• Моделирование включает в себяотображение проблемы из
реального мира в мир моделей
(процесс абстракции), анализ и
оптимизацию модели, нахождение
решения, и отображение
решения обратно в реальный мир.
3
4.
45.
56. Имитационное моделирование
экспериментальныйметод
исследования
реальной системы по ее имитационной модели,
который сочетает особенности экспериментального
подхода и специфические условия использования
вычислительной техники
6
7.
• Аналитическая модель – статическая,ограничения – см. предыдущую лекцию.
• Имитационную модель можно
рассматривать как множество правил
(дифференциальных уравнений, карт
состояний, автоматов, сетей и т.п.),
которые определяют в какое состояние
система перейдёт в будущем из заданного
текущего состояния.
• Имитация здесь – это процесс
“выполнения” модели, проводящий её
через (дискретные или непрерывные)
изменения состояния во времени.
7
8.
ПРИМЕРЫ МОДЕЛЕЙ ВС• модели технических средств, имитирующие
работу центральных и периферийных устройств
вычислительной системы
• модели программных средств, имитирующие
функционирование программ, обеспечивающих
работу вычислительной системы
• стыковочно-оптимизационные модели,
осуществляющие увязку предыдущих типов
моделей в единую согласованную систему
8
9.
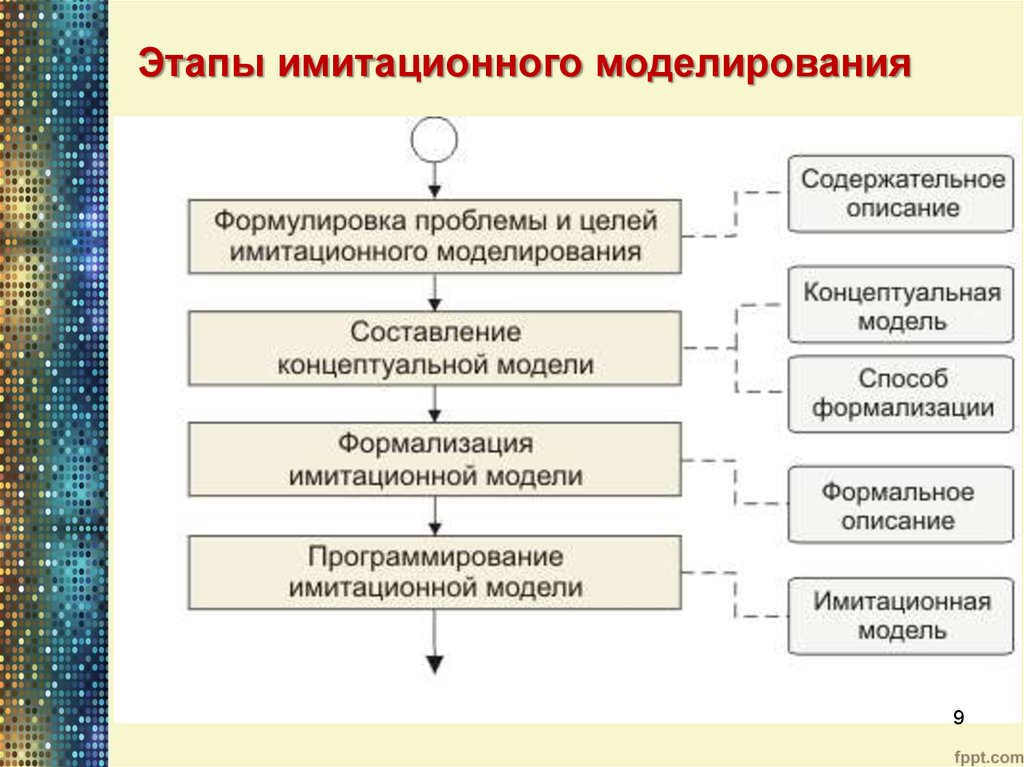
Этапы имитационного моделирования9
10.
Этапы имитационного моделирования10
11.
Критерии целесообразностиприменения ИМ
• отсутствие или неприемлемость
аналитических, численных и качественных
методов решения поставленной задачи;
• наличие достаточного количества исходной
информации о моделируемой системе;
• необходимость проведения на базе других
возможных методов решения очень большого
количества вычислений;
• возможность поиска оптимального варианта
системы при ее моделировании на ЭВМ.
11
12.
Достоинства ИМ• возможность исследования функционирования
системы в любых условиях;
• сокращение продолжительности испытаний по
сравнению с натурным экспериментом;
• возможность включения результатов натурных
испытаний реальной системы или ее частей;
• гибкость варьирования структуры, алгоритмов и
параметров моделируемой системы;
• часто
является
единственным
практически
реализуемым
методом
исследования
функционирования
систем
на
этапе
их
проектирования.
12
13.
Недостаток ИМ• решение,
полученное
при
анализе имитационной модели,
всегда носит частный характер.
13
14. Имитационное моделирование (2)
Имитационная модель воспроизводитпроцесс функционирования системы во
времени, причём имитируются
элементарные явления, составляющие
процесс, с сохранением их логической
структуры и последовательности
протекания во времени
[Советов, Яковлев, с.34]
14
15. Особенности ИМ
• По сравнению с аналитическимимоделями:
– универсальность применения (+);
– результат для конкретного набора
входных данных (-);
• По сравнению с «программами
общего назначения»:
– «ТЗ формируется по ходу дела…»
– Поддержка понятий предметной области
15
16. Подходы в имитационном моделировании на шкале уровня абстракции
1617. Системная динамика
• СД абстрагируется от отдельныхобъектов и событий и предполагает
«агрегатный» взгляд на процессы,
концентрируясь на политиках, этими
процессами управляющих.
• В подходе СД, структура и поведение
системы представимо как множество
взаимодействующих обратных связей
и задержек.
17
18. Модель распространения нового продукта
1819. Модели динамической системы
• Соответствующая математическая модель,как и в случае СД, будет состоять из набора
переменных состояния и системы алгебродифференциальных уравнений над ними.
• В отличие от СД, здесь переменные
состояния имеют прямой «физический»
смысл: координата, скорость, давление,
концентрация, и т.д.; они естественно
непрерывные и не являются агрегатами
(количествами) дискретных объектов.
19
20. Модель динамической системы: прыгающий мячик в MATLAB Simulink
2021. Классификация ИМ по способам продвижения времени
• С постоянным шагом– Непрерывные модели
– Потактовые модели
• От события к событию
– Дискретно-событийные модели
• Гибридные модели
– Совместная работа компонентов разного
рода
– Переключение режимов «непрерывного»
компонента
21
22. Дискретно-событийная модель
2223.
Дискретно-событийная модель• В основе Д-С подхода лежит концепция заявок
(транзактов, entities), ресурсов и потоковых
диаграмм (flowcharts).
• Заявки (транзакты) – пассивные объекты,
представляющие людей, детали, задачи,
сообщения и т.п. Они следуют по модели, стоя
в очередях, обрабатываясь, захватывая и
освобождая ресурсы, разделяясь, соединяясь
и т.д.
• Д-С модель можно рассматривать как
глобальную схему обработки заявок,
обычно со стохастическими элементами.
23
24. Агентное моделирование
• Модели существенно децентрализованы(моделированием снизу вверх)
• Модель описывает карта состояний
(statecharts) (фактически, конечный
автомат с несколькими дополнениями)
24
25. Модель Хищники – жертвы (Predator Prey)
• Модель Х-Ж состоит из пары дифференциальныхуравнений, описывающих динамику популяций
хищников и жертв (или паразитов – носителей) в её
простейшем случае
• Модель характеризуется колебаниями в размерах
обеих популяций, причём пик количества хищников
немного отстаёт от пика количества жертв.
Условия:
• а) жертвы всегда имеют достаточное количество
ресурсов и погибают, только будучи съеденными
хищниками;
• б) жертвы – единственный источник пищи для
хищников, и хищники умирают только от голода;
• в) хищники могут поглощать неограниченное
количество жертв;
• г) среда обитания не имеет размерностей, то есть
25
любой хищник может встретить любую жертву.
26. Модель хищники-жертвы
2627. GPSS
• GPSS - языкпрограммирования,
используемый для
имитационного моделирования различных систем,
в основном систем массового обслуживания.
• Программа на языке GPSS состоит из блоков,
которые имитируют различные параметры
«устройств» в модели.
27
28. Основные понятия gpss
Транзакт - структура данных,содержащая поля:
имя или номер транзакта;
время появления транзакта;
текущее модельное время;
номер блока, в котором находится
транзакт;
номер блока, куда он продвигается;
момент времени начала продвижения;
приоритет транзакта;
параметры транзакта: P1, P2, ...
28
29. Основные понятия gpss
• Cтандартные числовыеатрибуты (СЧА) - свойства и
методы объекта;
• Очереди, регистратор очереди;
• Таблица;
• Дисциплина обслуживания (FIFO…);
• Часы модельного времени (масштаб);
29
30. Gpss
SIMULATEGENERATE (1.1,0.25,,,);
ADVANCE (1,0.25);
TERMINATE;
30
31. Блоки gpss. Generate
• GENERATEОперанд
А
В
С
D
Е
[A],[B],[C],[D],[E]
Значение по
умолчанию*
Значение
Средний интервал времени (число,
0
СЧА)
Половина поля допуска равномерно 0
распределенного интервала (число,
CЧА)
Смещение интервалов
Смещение
отсутствует
Ограничитель транзактов
∞
Уровень приоритета транзакта.
Возможные значения 0 – 127
0
31
32. Блоки gpss. Generate. Примеры
1. Задание равномерного законараспределения:
GENERATE
6,4
Операнды: A = 6, В = 4 (2,3,4,5,6,7,8,9,10)
2. Задание детерминированного значения
интервалов поступления:
GENERATE
10
Операнды: A = 10, В = 0 (по умолчанию).
3. Генерирование одного транзакта
GENERATE
,,,1
32
33. Блоки gpss. Advance
• Блок осуществляет задержку продвижениятранзакта
• ADVANCE
Операнд
А
В
A[,B]
Значение
Среднее время задержки на
0
обслуживание
Половина
поля
допуска
равномерно
распределенного 0
времени задержки
Значение по
умолчанию
33
34. Блоки gpss. Advance, SEIZE, RELEASE. ПРИМЕРЫ
ADVANCE30,5 - время задержки
транзакта в блоке – случайная
величина, равномерно
распределенная на интервале [25,
35].
SEIZE
PRIB;
ADVANCE 16,4;
RELEASE
PRIB;
(16±4)
34
35. диаграмма программы на Gpss world
3536. Типовая одноканальная смо
3637. Регистратор очереди
QUEUE A[,B]Операнд
А
В
Значение
DEPART A[,B]
Результат
по умолчанию
Имя очереди, в которую необходимо стать
Ошибка
транзакту или которую надо покинуть
Число единиц, на которое увеличивается
(уменьшается) длина очереди
1
Queue:
1. Счетчик входов +В;
2. Длина очереди +В (Q$<имя очереди>);
3. Транзакт в очереди (имя, тек. мод. время).
37
38. диаграмма программы на Gpss world
3839. Статистика очереди.
3940. Подготовка к практике
www.minuteitemsoftware.orgGPSS World Student version
1. Боев В.Д. Моделирование систем.
Инструментальные средства GPSS
World.
2. Томашевский В., Жданова Е.
Имитационное моделирование в
среде GPSS.
40