







 electronics
electronicsSimilar presentations:






")



Устройства электропривода для РЭУ и ТКС
1. Дисциплина: Электропитание радиоэлектронных устройств и телекоммуникацион-ных систем
Дисциплина:Электропитание
радиоэлектронных
устройств и
телекоммуникационных систем
2. Лекция №9
Тема лекции:Устройства
электропривода для
РЭУ и ТКС
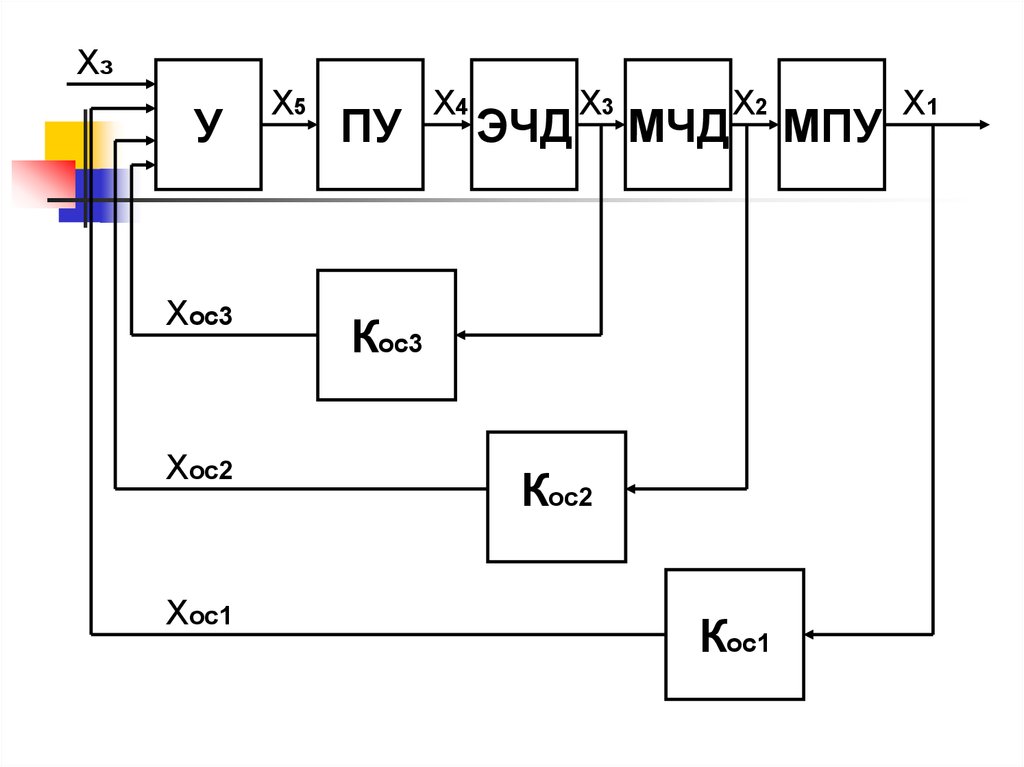
3. Учебные вопросы
1. Назначение, структура и элементыавтоматизированного
электропривода.
2. Классификация электроприводов.
3. Регулирование скорости
электропривода и режимы его
работы.
4. Общие принципы построения
систем управления электроприводов.
4. Литература
1. Немцов М.В.Электротехника и
электроника: Учебник для
вузов. – М.: Высш. шк.
2007, с.511-521.
5. Типовая структурная схема автоматизированного ЭП
6.
Функцииавтоматизированного ЭП
1. Подведение к ИО механической энергии, за счёт которой
совершается их движение . Характер этого движения может быть
разнообразным:
вращательным однонаправленным (насос, вентилятор);
вращательным реверсивным (станки);
поступательным однонаправленным (лента транспортера,
лентопротяжный механизм) и реверсивным (подъёмные
механизмы); возвратно-поступательным (прессы);
движение в нескольких плоскостях (антенна радиостанции,
“руки” робота и манипулятора).
2. Регулирование скорости движения, а также поддержание с
заданной точностью скорости движения ИО.
3. Функции по автоматизации технологических процессов:
обеспечение защит, блокировок, сигнализации;
автоматического пуска, выхода на различные режимы и останова.
7. Классификация ЭП по виду движения
Электроприводпо виду движения
Вращательного
Поступательного
Однонаправленного
Реверсивного
Непрерывный характер
Дискретный характер
Возвратнопоступательного
8. Классификация АЭП по степени автоматизации
АЭПСледящий
Программноуправляемый
Адаптивный
Позиционный
9. Способы регулирования угловой и линейной скорости ИО
, , ′ЭД
МПУ
(i, )
ио, ио,
′ио
ИО
хио, ио,
′ио
1) применение МПУ с регулируемым
передаточным числом i или радиусом
приведения при нерегулируемой скорости
вращения вала ЭД (i=var или =var;
=const);
2) регулирование скорости вращения вала
двигателя при неизменных параметрах МПУ
( =var; i=const либо =const).
10.
Регулирование скоростихарактеризуется следующими
основными показателями:
1) диапазоном регулирования, т. е. отношением
максимальной и минимальной скоростей при заданных
пределах изменения нагрузки на валу:
D
ωmax
ωmin
2) стабильностью скорости, которая характеризуется
изменением скорости при изменении момента нагрузки
на валу;
3) экономичностью регулирования скорости; при работе
двигателя с различными скоростями используется показатель
средневзвешенный КПД за регулировочный цикл
n
η св
Р
2i
ti
1
n
Р
2i
1
Рi
ti
11.
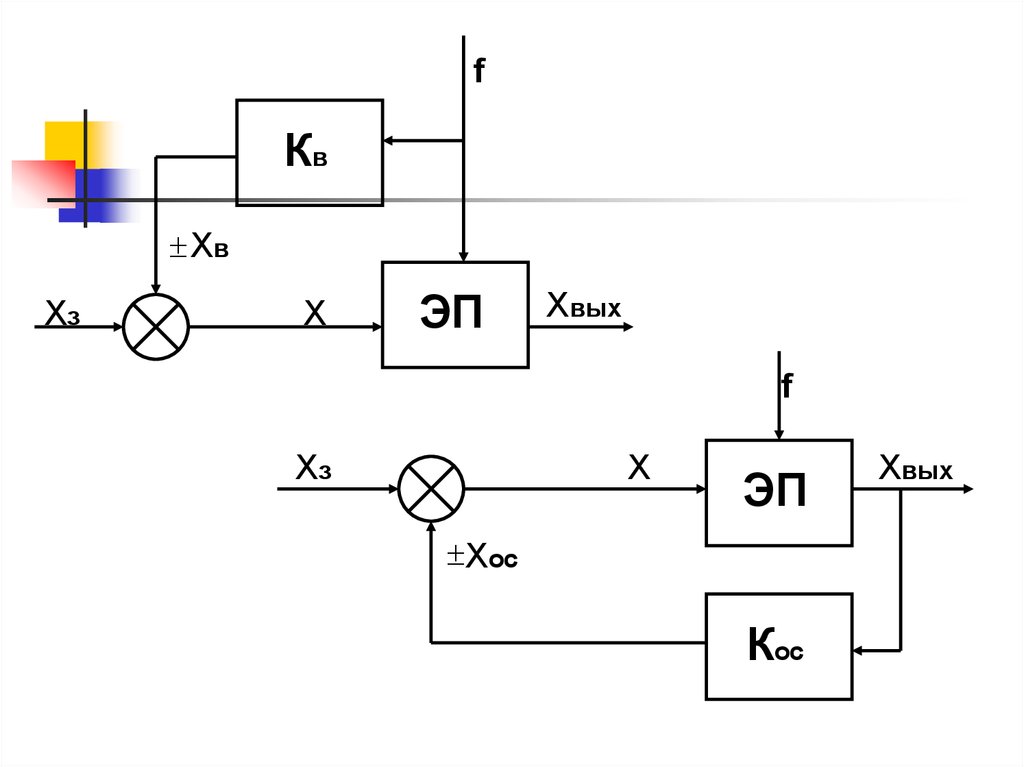
fКв
Xв
Xз
X
ЭП
Xвых
f
Xз
X
ЭП
Xос
Кос
Xвых
12.
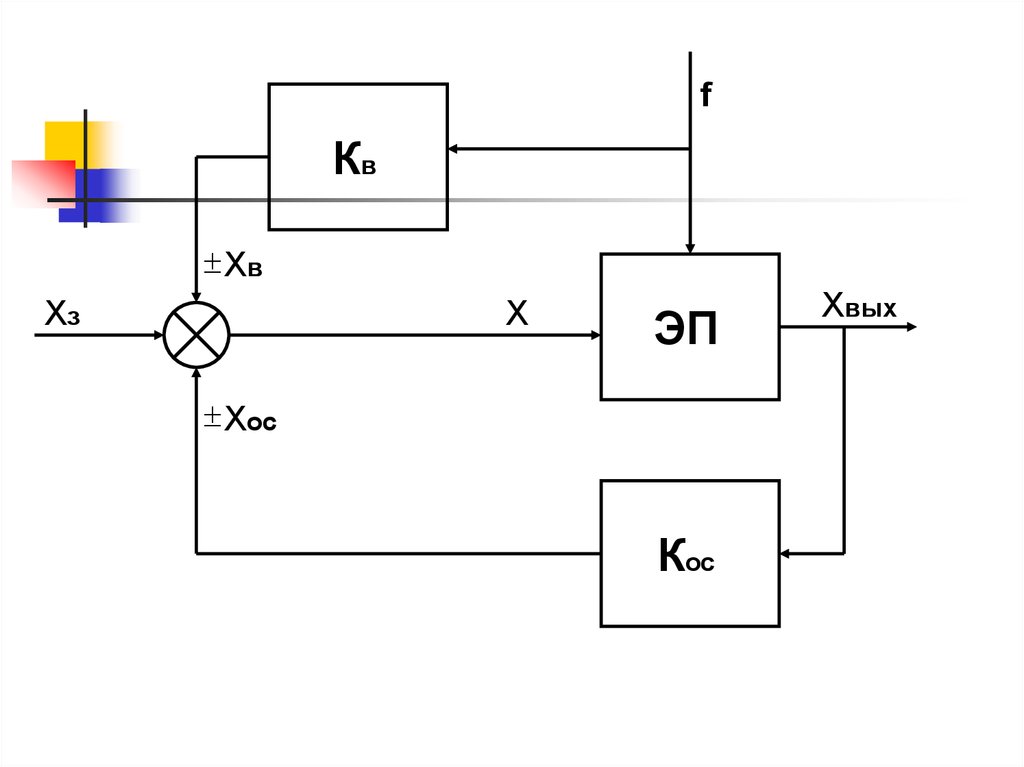
fКв
Xв
Xз
X
ЭП
Xос
Кос
Xвых
13.
XзУ
Xос3
Xос2
Xос1
X5
ПУ
X4
ЭЧД
X3
МЧД
X2
Кос3
Кос2
Кос1
МПУ
X1
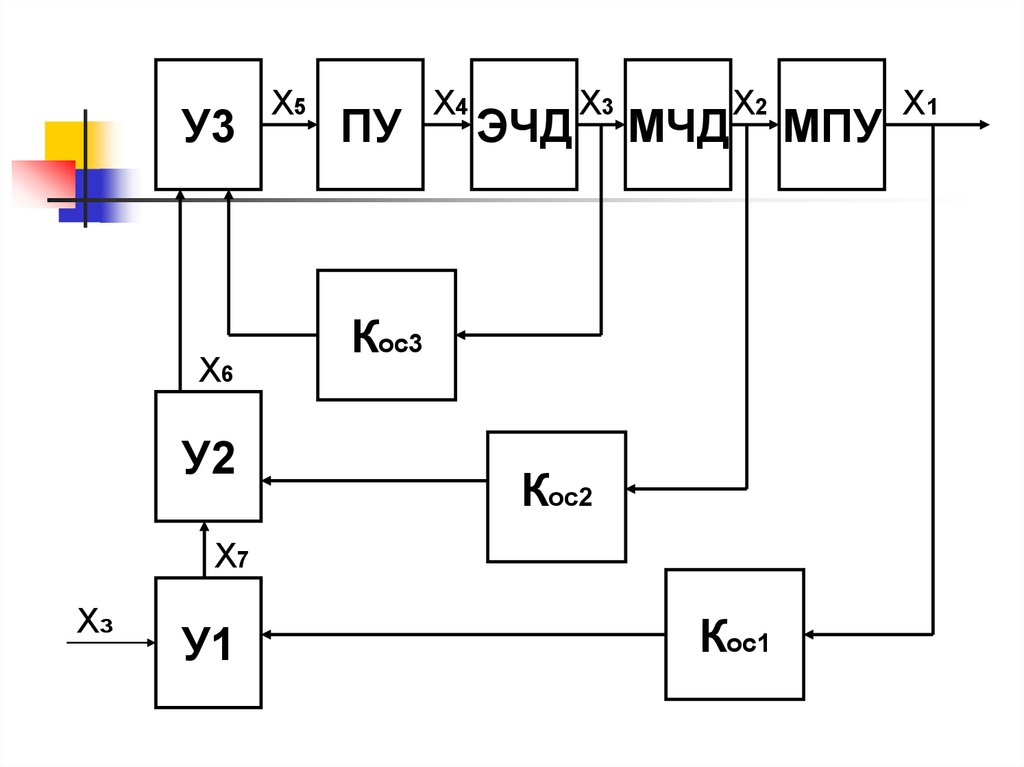
14.
У3X6
У2
X5
ПУ
X4
ЭЧД
X3
МЧД
X2
Кос3
Кос2
X7
Xз
У1
Кос1
МПУ
X1