










, можно определить мощность оружия, подобрать оптимальный тип пули к нему, составить таблицу")

 electronics
electronicsSimilar presentations:










Рамочный хронограф
1. Рамочный хронограф
СтудентРуководитель проекта:
Омский государственный технический университет
2. Современный образ жизни с изобилующим офисным трудом или тяжелой работой на заводе зачастую приводит к мысли об активном
проведении досуга, а не просиживании свободных часов зателевизором или компьютером.
Сейчас мы имеем множество вариантов активного проведения
своего свободного времени. Одним из распространенных видов
хобби, в настоящее время, является спортивная стрельба.
3. Существует множество способов определения скорости движущихся объектов. В частности способов измерения скорости движущегося
снаряда (пули).Если не требуется высокой точности измерения, то можно измерять
по провисанию траектории снаряда (пули) или по отклонению
маятника. Эти способы самые простые и дешевые, но не
отличаются достаточной точностью.
4. Одним из наиболее распространенных методов определения скорости движения тела по траектории является метод, основанный на
измерении времени t прохождения телом участка трассыопределенной длины l.
В этом методе, делая допущения о линейном изменении скорости,
рассчитывают ее искомое значение по зависимости
l
v
t
Найденное значение скорости v относят к точке А, которая совпадает
с серединой измерительного участка l.
L/2
A
L
v
5.
ИК1ИК2
L
ПР1
УС1
УС2
ПР2
ДШ
МК
Упр
ИНД
Кл
+5В
БП
COM
ИК1, ИК2 – инфракрасные излучатели
ПР1, ПР2 – приемные датчики (фототранзисторы)
УС1, УС2 – усилители сигналов
COM – устройство передачи информации на ПК
БП – блок питания
ДШ – дешифратор
МК – микроконтроллер
ИНД – индикатор
Упр – устройство управления
Кл – транзисторные ключи
Структурная схема рамочного хронографа
6.
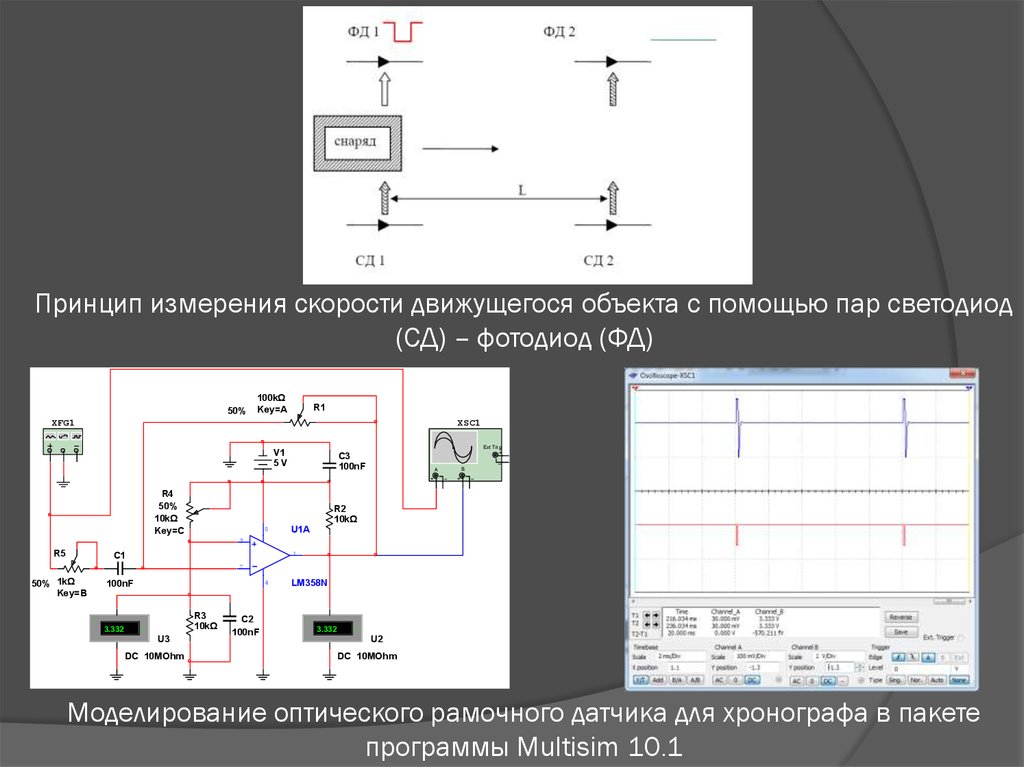
Принцип измерения скорости движущегося объекта с помощью пар светодиод(СД) – фотодиод (ФД)
50%
100kΩ
Key=A
R1
XFG1
XSC1
V1
5V
Ext T rig
+
C3
100nF
_
R4
50%
10kΩ
Key=C
B
A
+
_
+
_
R2
10kΩ
8
U1A
3
R5
1
C1
2
50% 1kΩ
Key=B
4
100nF
R3
10kΩ
+
3.332
-
V
U3
DC 10MOhm
C2
100nF
LM358N
+
3.332
-
V
U2
DC 10MOhm
Моделирование оптического рамочного датчика для хронографа в пакете
программы Multisim 10.1
7.
HG1A
B
C
D
E
F
G
X5
1
12
10
8
6
4
5
2
11
7
Цепь
A
1
B
2
C
3
D
Панель индикации на основе 3
цифровых индикаторов SA08-21GWA
4
E
5
F
6
G
7
OA1
8
OA2
9
OA3
10
A
B
C
D
D
E
E
F
G
H
C
D
E
F
E
F
G
1
12
10
8
6
4
5
2
11
7
A
B
C
D
D
E
E
F
G
H
9
13
OA
OA
OA
3
OA2
9
13
SA08-21
OA1
OA3
OA
OA1
HG2
A
B
C
D
G
OA2
OA
3
SA08-21
A
B
OA
HG3
A
B
C
D
E
F
G
1
12
10
8
6
4
5
2
11
7
A
B
C
D
D
E
E
F
G
H
OA
OA
OA
SA08-21
3
9
13
OA3
8.
R2R18
VT1
+5V
VT9
C5
R1
+5V
C16
R32
R3
VT2
R30
R19
VT10
R10
C6
+5V
C1
C17
RA0
C21
R4
HL1
VT3
DA2:A
R8
2
3
C7
-IN
+IN
R20
OUT
HL5
VT11
R16
1
C18
HL2
R5
C13
R9
VDD
+5V
8
HL6
VT4
VSS
C8
HL3
R21
4
VT12
C14
C19
R17
HL7
R6
VT5
R22
HL4
VT13
R11
C9
R31
RA1
HL8
C20
DA2:B
6
5
-IN
+IN
OUT
7
HG1
X1
Цепь
+9V
GND
Конт.
A
B
C
D
DA1
+5V
1
2
C4
C10
E
X3
C11
Конт.
R12
Цепь
1
2
+5V
X4
RS232
Цепь
F
G
X5
Цепь
R23
GND
1
A
A
1
2
B
B
2
R24
DD1
1
ZQ1
2
3
4
5
C2
C3
R25
C12
R7
6
7
DD2
VDD
VSS
RA5
RA0
RA4
RA1
RA3
RA2
RC5
RC0
RC4
RC1
RC3
RC2
5
14
13
12
RA0
RA1
1
11
10
2
9
8
4
3
D0
D1
D2
UPR
GND
A
B
C
D
E
F
D3
BI
VCC
GND
X2
Цепь
DC
C
C
3
4
D
D
4
5
E
E
5
6
F
F
6
R27
R28
R29
14
6
3
R26
11
10
9
8
7
13
12
+5V
C15
7
G
G
7
8
OA1
OA1
8
9
OA2
OA2
9
10
Конт.
OA3
1
12
10
8
6
4
5
2
11
7
OA3
10
A
B
C
D
D
E
E
F
G
H
OA
OA
OA
3
OA1
9
13
A
B
C
D
E
F
HG2
A
B
C
D
E
F
G
G
1
12
10
8
6
4
5
2
11
7
A
B
C
D
D
E
E
F
G
H
OA
OA
OA
3
OA2
9
13
OA1
OA2
OA3
1
2
HG3
A
B
C
D
E
F
G
R13
VT6
R14
VT7
R15
VT8
Принципиальная схема рамочного хронографа
1
12
10
8
6
4
5
2
11
7
A
B
C
D
D
E
E
F
G
H
OA
OA
OA
3
9
13
OA3
9.
R1R30
R32
C5
VT1
R31
C16
R11
R9
R2
R18
C13 DA2
C1
HL1
C21
R10
R8
R16
C6
VT9
HL5
C17
C14
VT2
VT10
R17
R3
R19
HL2
C4
DA1
HL6
X1
X3
C2
R7
C7
X2
C12
C18
C3
VT3
R12
R4
HL3
VT11
R20
ZQ1
C11
C15
HL7
R13
C8
R15
C19
R28
R14
VT12
X4
R29
DD1
VT4
R23
R5
R21
R24
C10
HL4
R25
VT6
VT8
VT7
HL8
R26
DD2
R27
C9
C20
R6
R22
VT5
VT13
HG1
HG2
HG3
X1
Топология расположения деталей и перемычек печатных плат хронографа
10.
Топология нижнего слоя основной печатной платы рамочногохронографа (вид со стороны печатных проводников)
11.
Относительная погрешность измерения интервалов времениподсчитывается по формуле:
1
0
f 0 x
100%
0,11%
Так как скорость находится по соотношению v=l/t, то наибольшая
относительная погрешность будет составлять:
t
,
t
Приняв за относительную погрешность измерения t значение
относительной погрешность измерения интервалов времени, а
относительную ошибку в измерении l равной 2%, получаем значение
наибольшей относительной погрешности при расчете скорости
хронографом равной:
0,11 2 2,1%
12.
13. Зная скорость снаряда (пули), можно определить мощность оружия, подобрать оптимальный тип пули к нему, составить таблицу
баллистических поправок, сверить характеристикиоружия до и после модернизации. Кроме того это позволяет
определять время, когда необходимо заняться ремонтом
оружия и позволяет тестировать возможности оружия. А при
наличии подобного хронографа и баллистического
калькулятора можно достичь максимальной точности
стрельбы на дальние расстояния.