



















































































")










 informatics
informaticsSimilar presentations:










Введение в техническое зрение
1. Введение в техническое зрение
Степанов Дмитрий НиколаевичНачальник лаборатории систем технического зрения
dnstepanov@gmail.com
Image by
kirkh.deviantart.com
2.
ДальшеМодель камеры
Камера и человеческий глаз
Восприятие света и цвета
Пиксели
Фильтрация изображений
Практическое задание: линейные фильтры
3. Проективная геометрия и модели камеры
Сегодняшнее занятиеПроективная геометрия и
модели камеры
Slides from Derek Hoiem,
Alexei Efros, Steve Seitz, and
David Forsyth
4.
Что нужно, чтобы сделать камеру?5.
Камера и реальный мирКакого роста женщина?
Как высоко установлена камера?
Как камера повёрнута?
Каково фокусное расстояние?
Который мяч ближе?
6.
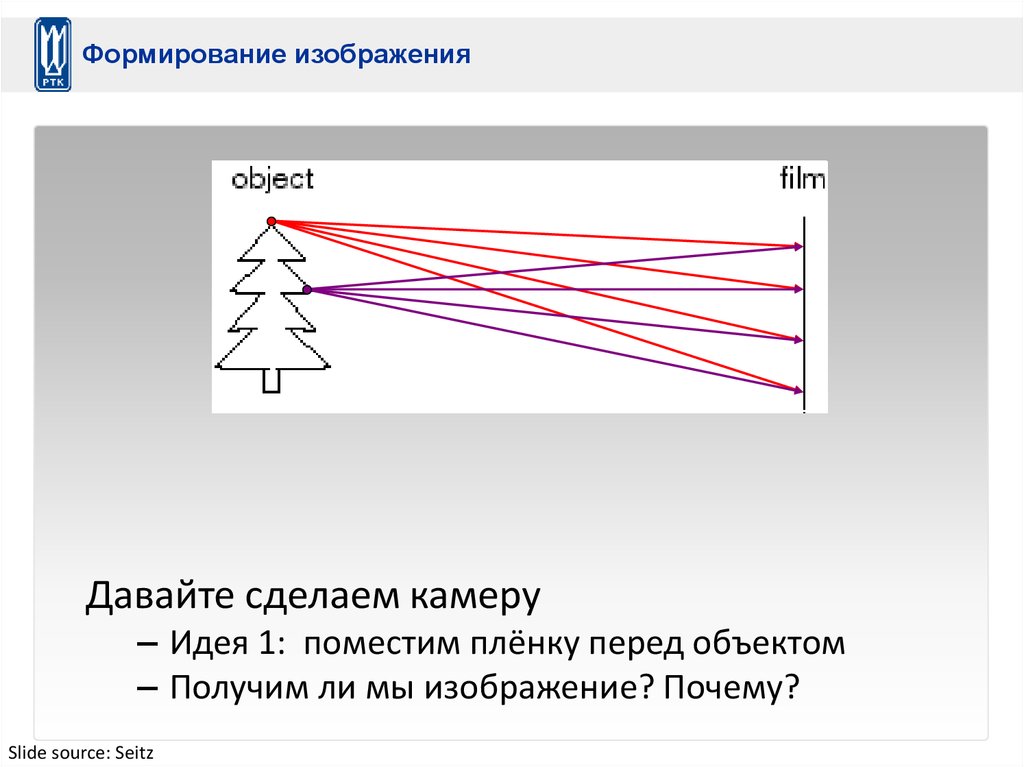
Формирование изображенияДавайте сделаем камеру
– Идея 1: поместим плёнку перед объектом
– Получим ли мы изображение? Почему?
Slide source: Seitz
7.
Камера-обскураИдея 2: добавим барьер и отсечем почти
все лучи
– Это уменьшит размытие
– Отверстие известно как диафрагма (aperture)
Slide source: Seitz
8.
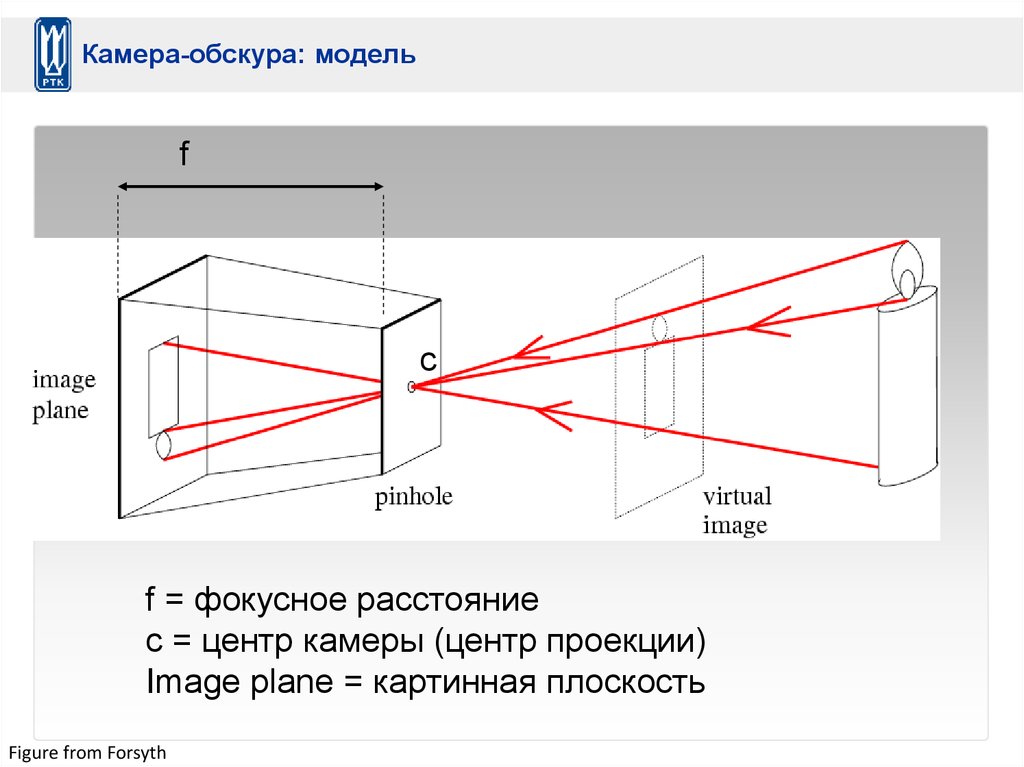
Камера-обскура: модельf
c
f = фокусное расстояние
c = центр камеры (центр проекции)
Image plane = картинная плоскость
Figure from Forsyth
9.
Камера-обскура: пре-камера• Известна со времен Древнего Китая и Греции
(Mo-Ti, China, 470BC - 390BC)
Иллюстрация Camera obscura
Настоящая камера обскура
в Университете Северной Каролины
Photo by Seth Ilys
(лат. camera obscūra — «тёмная комната»)
10.
Камера-обскура: применение (обводка)Lens Based Camera Obscura, 1568
11.
Первые фотографии: Ньепс, 8 часовСамая старая сохранившаяся
фотография
Фотография первой фотографии
– 8 часов, пьютерная (оловянная)
пластина
Жозеф Ньепс, 1826
Университет Техаса, Остин
Ньепс позже работал с Луи Дагером над созданием дагеротипов
12.
Первые фотографии: дагерротип, 20 минут1837
1864
13. Изображение – отображение сцены на плоскости
Машина для уменьшения размерностиИзображение – отображение
сцены на плоскости
Трехмерный мир
Двумерное изображение
Point of observation
Figures © Stephen E. Palmer, 2002
14.
Slide source: SeitzПроекция может быть обманчива
15.
Slide source: SeitzПроекция может быть обманчива
16.
Проективная геометрияЧто теряется?
• Длина (расстояние)
Кто выше?
Которые ближе?
17.
Расстояние не сохраняетсяA’
C’
B’
Figure by David Forsyth
18.
Проективная геометрияЧто теряется?
• Длина
• Углы
Параллельные?
Перпендикулярные?
19.
Проективная геометрияЧто сохраняется?
• Прямые линии остаются прямыми
20.
Точки сходаПараллельные в реальности линии пересекаются на
кадре в точках схода, образующих…
21.
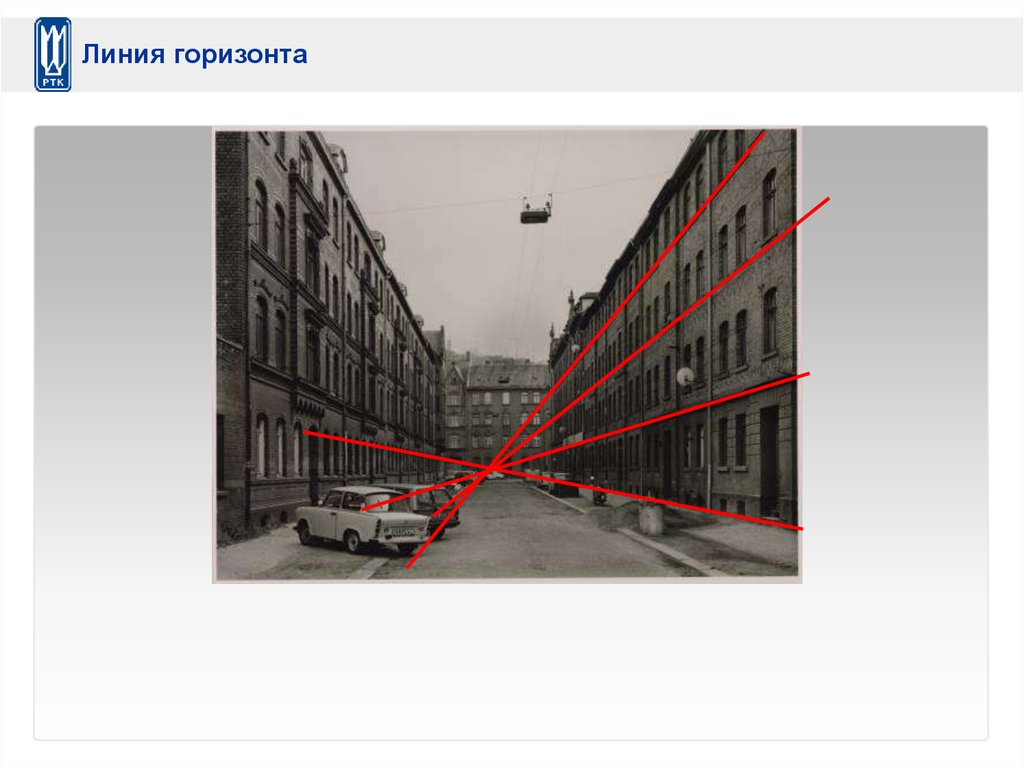
Точки схода и линия горизонтаПараллельные в реальности линии пересекаются на
кадре в точках схода, образующих…
линию горизонта
22.
Линия горизонтаТочка схода
Линия горизонта
o
Точка схода
o
23.
Линия горизонтаВертикальная
точка схода
(в бесконечности)
Линия
горизонта
Точка
схода
Slide from Efros, Photo from Criminisi
Точка схода
24.
Линия горизонта25.
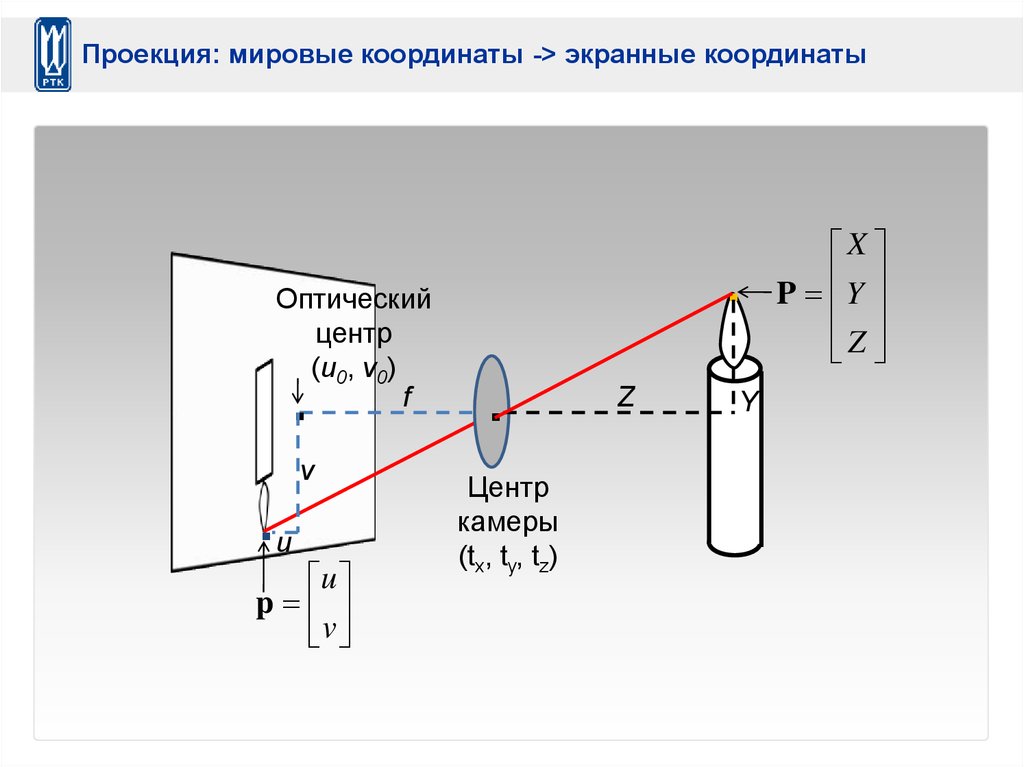
Проекция: мировые координаты -> экранные координатыОптический
центр
(u0, v0)
f
.
.
v
u
u
p
v
.
.
Центр
камеры
(tx, ty, tz)
Z
Y
X
P Y
Z
26.
Однородные координатыПреобразование к однородным координатам
Однородные
экранные координаты
Однородные
мировые координаты
Преобразование ИЗ однородных координат
27.
Однородные координатыИнвариантность к масштабу
x kx
kx
x
kw
w
k y ky ky y
w kw kw w
Однородные
координаты
Декартовы
координаты
Точке в декартовых координатах соответствует
луч в однородных
28.
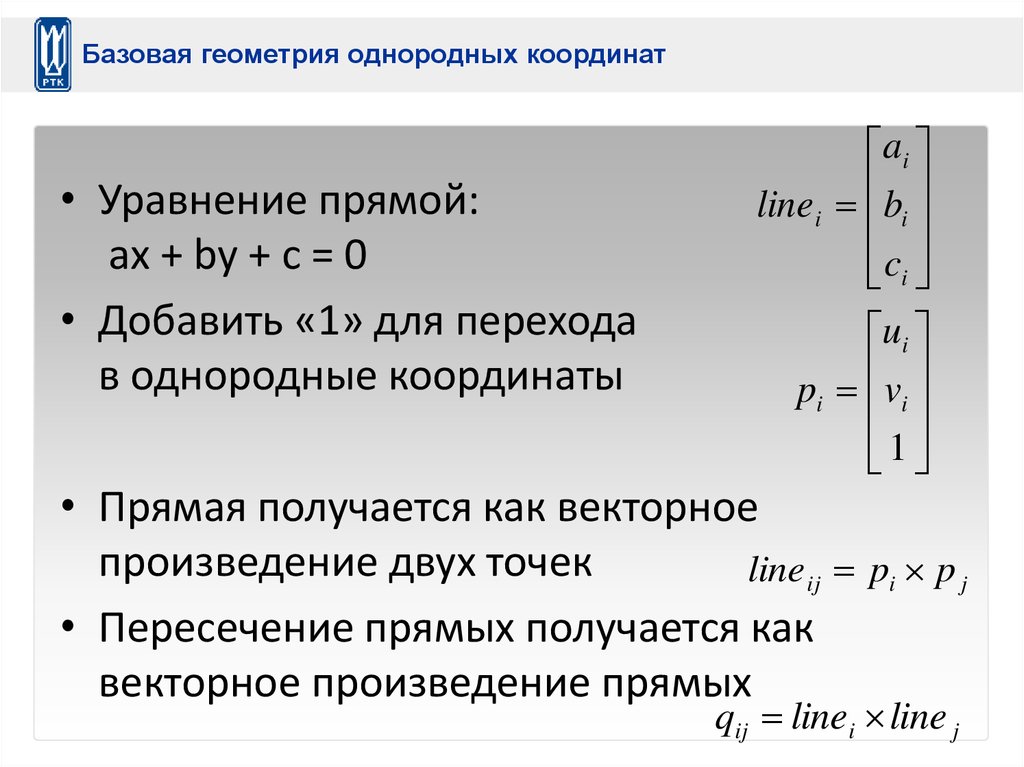
Базовая геометрия однородных координат• Уравнение прямой:
ax + by + c = 0
• Добавить «1» для перехода
в однородные координаты
ai
line i bi
ci
ui
pi vi
1
• Прямая получается как векторное
произведение двух точек
line ij pi p j
• Пересечение прямых получается как
векторное произведение прямых
qij linei line j
29.
Slide Credit: SavereseМатрица проекции
R,T
jw
kw
Ow
iw
x K R t X
x: Экранные координаты: (u,v,1)
K: Внутренняя матрица (3x3)
R: Вращение (3x3)
t: Перенос (3x1)
X: Мировые координаты: (X,Y,Z,1)
30.
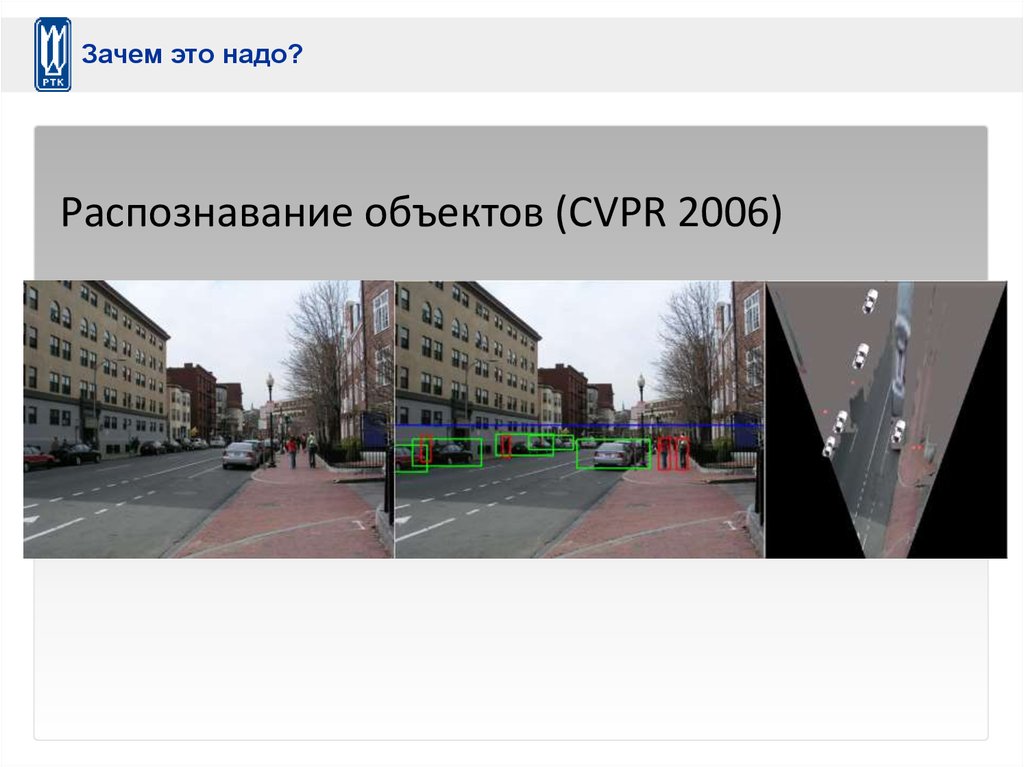
Зачем это надо?Соотнесение множества видов
31.
Зачем это надо?Распознавание объектов (CVPR 2006)
32. Соотнесение множества видов
Зачем это надо?Дополненная реальность (SIGGRAPH 2007)
Оригинал
Дополнение
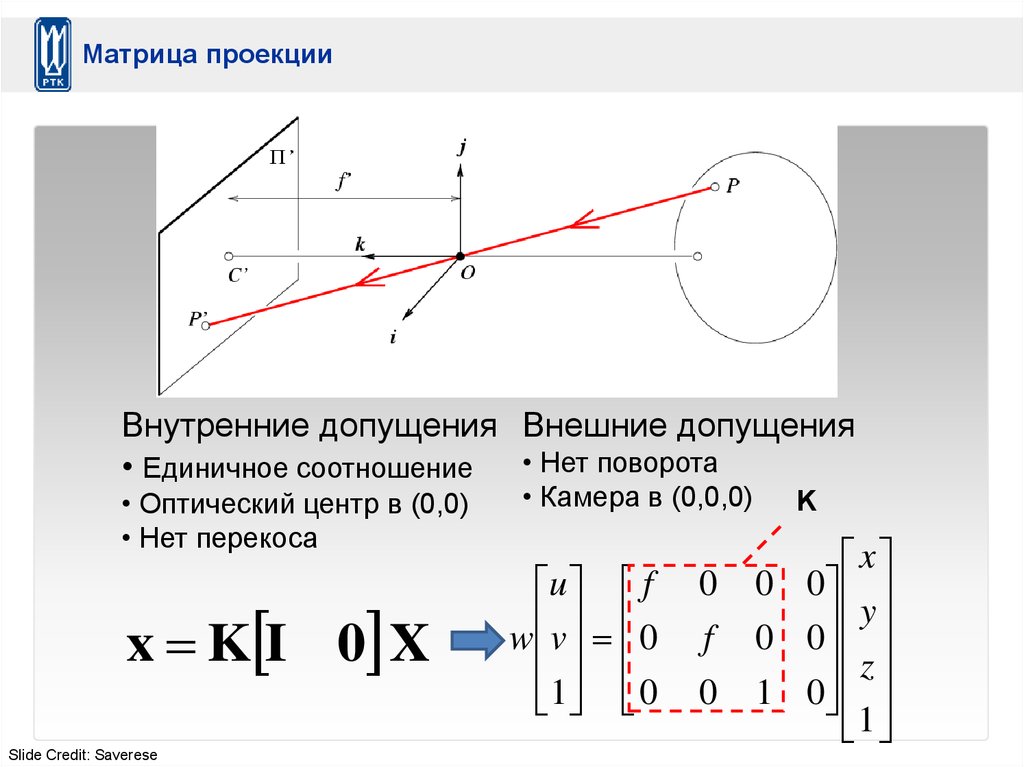
33.
Матрица проекцииВнутренние допущения Внешние допущения
• Единичное соотношение • Нет поворота
• Оптический центр в (0,0)
• Нет перекоса
x K I 0 X
Slide Credit: Saverese
• Камера в (0,0,0)
u f
w v 0
1 0
0
f
0
K
x
0 0
y
0 0
z
1 0
1
34.
Убираем допущения: известный оптический центрВнутренние допущения Внешние допущения
• Единичное соотношение
• Нет перекоса
x K I 0 X
• Нет поворота
• Камера в (0,0,0)
u f
w v 0
1 0
0
u0
f
v0
0
1
x
0
y
0
z
0
1
35.
Убираем допущения: квадратные пикселиВнутренние допущения Внешние допущения
• Нет перекоса
x K I 0 X
• Нет поворота
• Камера в (0,0,0)
u
w v 0
1 0
0
u0
v0
0
1
x
0
y
0
z
0
1
36.
Убираем допущения: прямые пикселиВнутренние допущения Внешние допущения
• Нет поворота
• Камера в (0,0,0)
x K I 0 X
u
w v 0
1 0
s
u0
v0
0
1
x
0
y
0
z
0
1
Note: different books use different notation for parameters
37.
Убираем допущения: перенос и поворот камерыR
jw
t
kw
Ow
iw
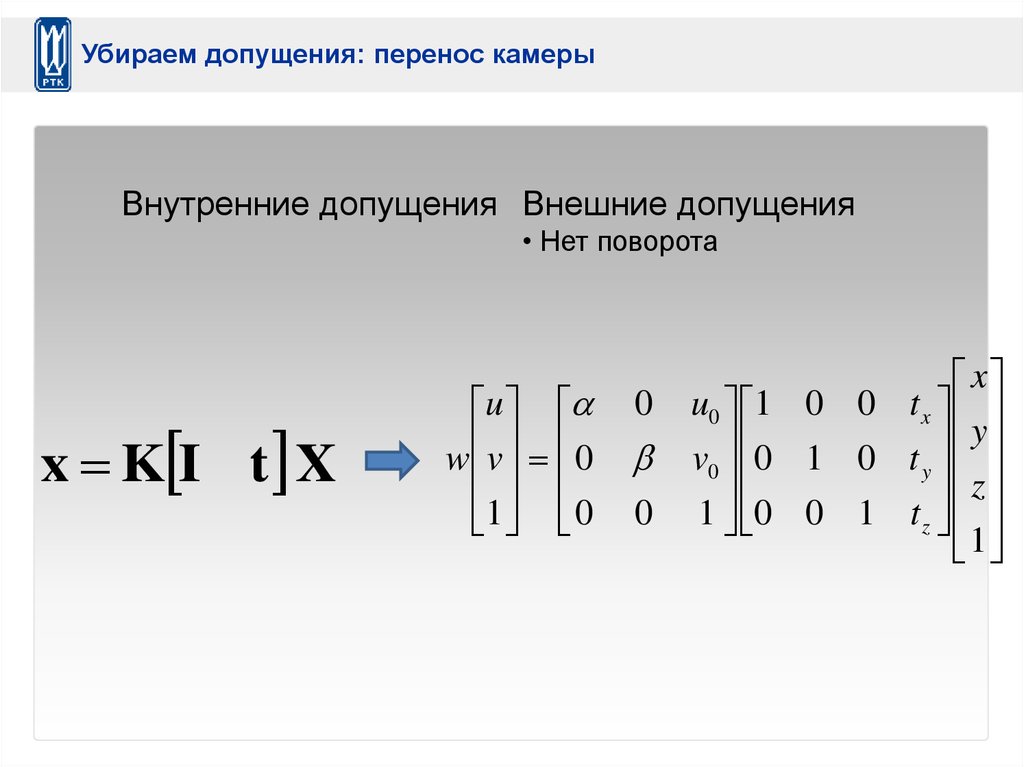
38.
Убираем допущения: перенос камерыВнутренние допущения Внешние допущения
• Нет поворота
x K I t X
u
w v 0
1 0
0
0
x
u0 1 0 0 t x
y
v0 0 1 0 t y
z
1 0 0 1 t z
1
39.
Slide Credit: SavereseТрехмерный поворот точек
Поворот вокруг координатных осей, против час.стрелки:
0
1
Rx ( ) 0 cos
0 sin
p’
y
z
p
0
sin
cos
cos 0 sin
R y ( ) 0
1
0
sin 0 cos
cos sin 0
Rz ( ) sin cos 0
0
0
1
40.
Убираем допущения: разрешаем поворот камерыx K R t X
u
w v 0
1 0
s
0
u0 r11 r12
v0 r21 r22
1 r31 r32
r13
r23
r33
x
tx
y
ty
z
t z
1
41.
Степени свободыx K R t X
5
u
w v 0
1 0
s
0
6
u0 r11 r12
v0 r21 r22
1 r31 r32
r13
r23
r33
x
tx
y
ty
z
t z
1
42.
Ортографическая проекция• Особый случай перспективной проекции
Image
World
x
– Также называется параллельной u 1 0 0 0
y
проекцией
w v 0 1 0 0
z
– Какова матрица проекции?
1 0 0 0 1
1
Slide by Steve Seitz
43.
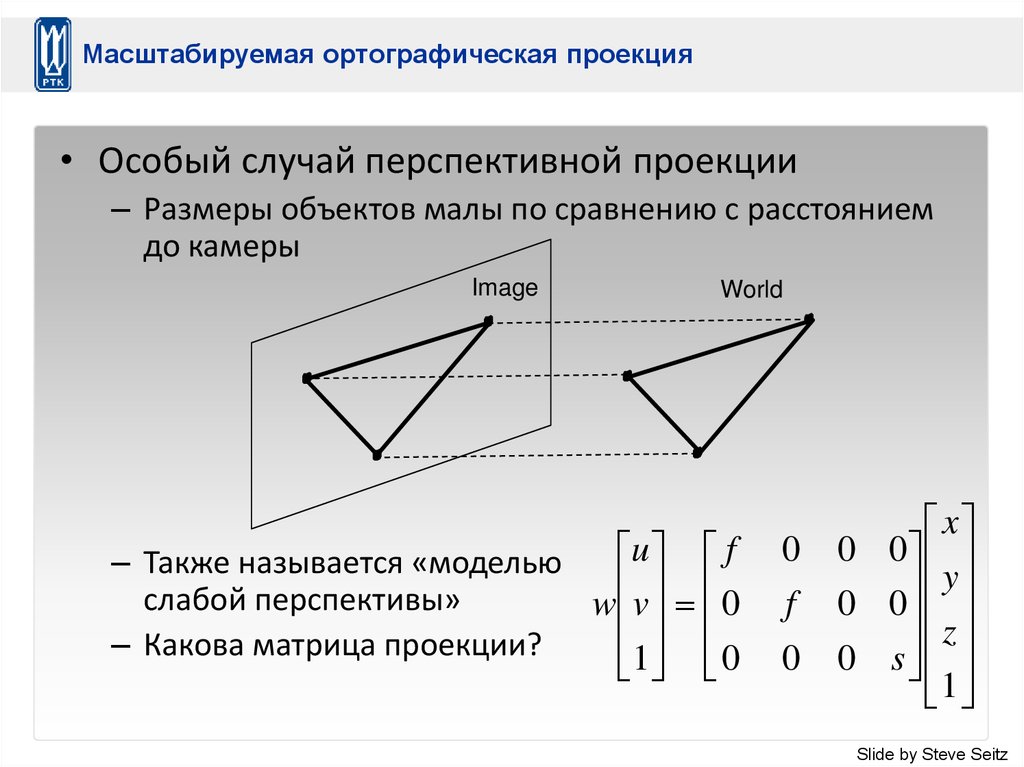
Масштабируемая ортографическая проекция• Особый случай перспективной проекции
– Размеры объектов малы по сравнению с расстоянием
до камеры
Image
World
u f
– Также называется «моделью
слабой перспективы»
w v 0
– Какова матрица проекции?
1 0
0
f
0
x
0 0
y
0 0
z
0 s
1
Slide by Steve Seitz
44. Vanishing Point = Projection from Infinity
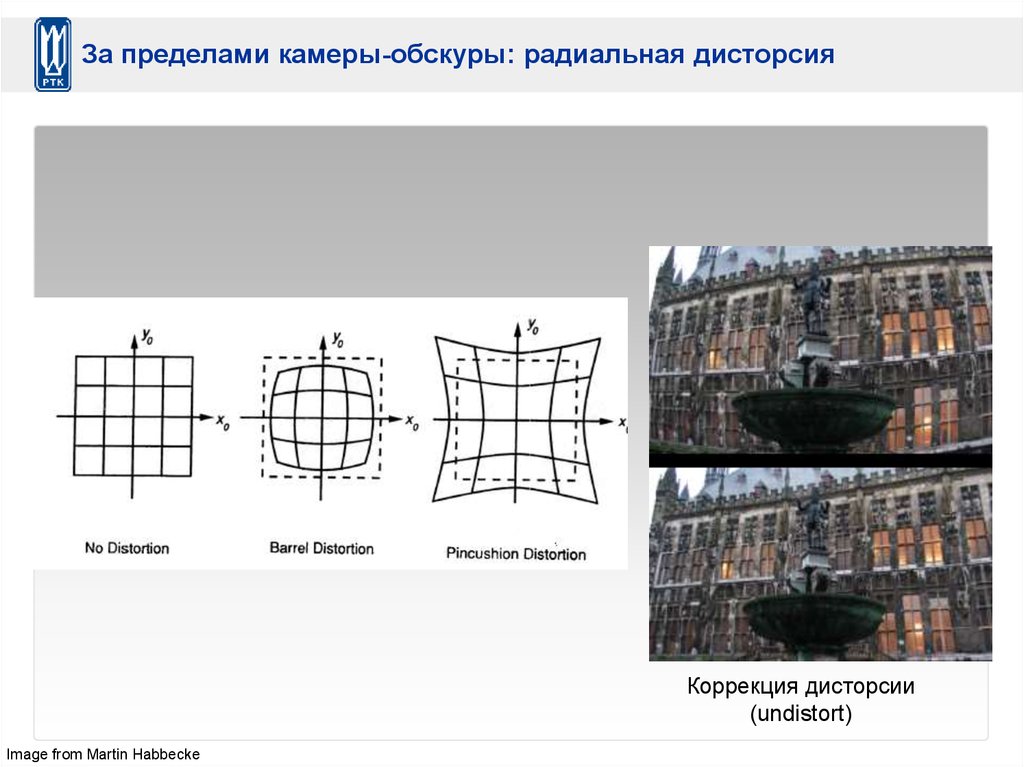
Поле зрения (зум, фокусное расстояние)45.
За пределами камеры-обскуры: радиальная дисторсияКоррекция дисторсии
(undistort)
Image from Martin Habbecke
46.
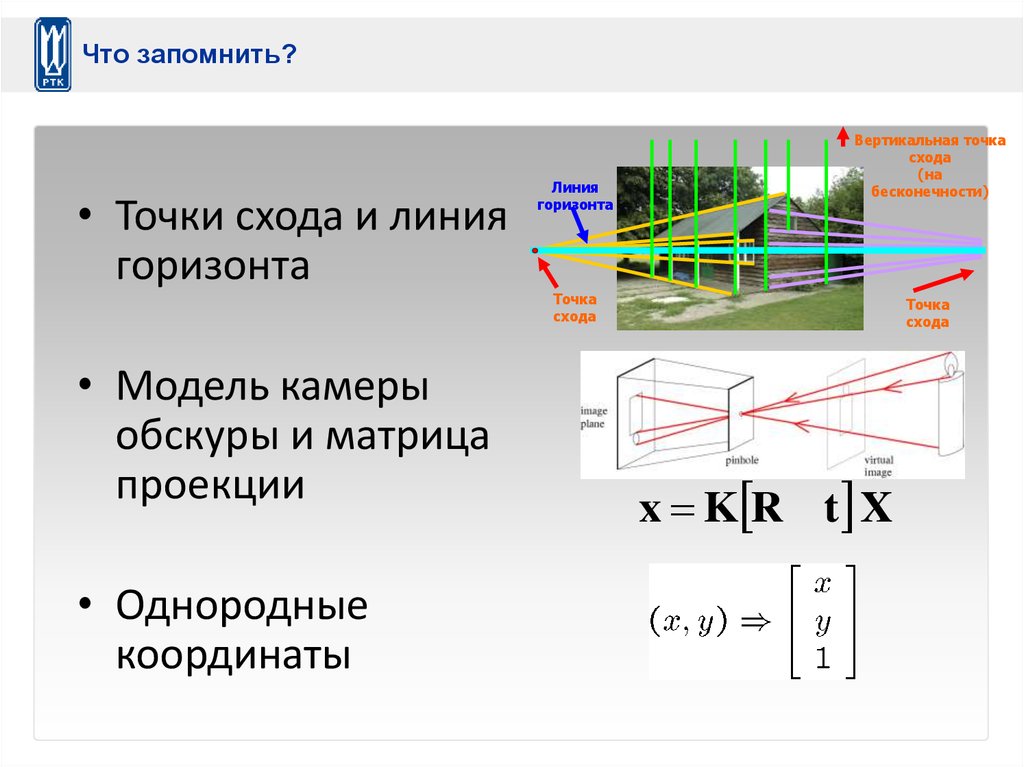
Что запомнить?• Точки схода и линия
горизонта
• Модель камеры
обскуры и матрица
проекции
• Однородные
координаты
Линия
горизонта
Вертикальная точка
схода
(на
бесконечности)
Точка
схода
Точка
схода
x K R t X
47.
Домашнее заданиеСделать из «зеркалки» камеру обскура
Измерить угол зрения камеры
48.
Adding a lens“circle of
confusion”
• A lens focuses light onto the film
– There is a specific distance at which objects are
“in focus”
• other points project to a “circle of confusion” in the
image
49.
Focal length, aperture, depth offield
F
focal point
optical center
(Center Of Projection)
• A lens focuses parallel rays onto a single focal
point
– focal point at a distance f beyond the plane of the lens
– Aperture of diameter D restricts the range of rays
Slide source: Seitz
50.
Slide source: SeitzDepth of field
f / 5.6
f / 32
Changing the aperture size or focal
length affects depth of field
Flower images from Wikipedia
http://en.wikipedia.org/wiki/Depth_of_field
51.
Shrinking the aperture• Why not make the aperture as small as
possible?
– Less light gets through
Slide by Steve Seitz
52. Adding a lens
Shrinking the apertureSlide by Steve Seitz
53. Focal length, aperture, depth of field
Capturing Light… in man andmachine
Many slides by
Alexei A. Efros
CS 143: Computer Vision
James Hays, Brown, Fall 2013
54. Depth of field
Image FormationDigital Camera
Film
The Eye
55. Shrinking the aperture
A photon’s life choicesAbsorption
Diffusion
Reflection
Transparency
Refraction
Fluorescence
Subsurface scattering
Phosphorescence
Interreflection
light source
λ
?
56. Shrinking the aperture
A photon’s life choicesAbsorption
Diffusion
Reflection
Transparency
Refraction
Fluorescence
Subsurface scattering
Phosphorescence
Interreflection
light source
λ
57. Capturing Light… in man and machine
A photon’s life choicesAbsorption
Diffuse Reflection
Reflection
Transparency
Refraction
Fluorescence
Subsurface scattering
Phosphorescence
Interreflection
light source
λ
58. Image Formation
A photon’s life choicesAbsorption
Diffusion
Specular Reflection
Transparency
Refraction
Fluorescence
Subsurface scattering
Phosphorescence
Interreflection
light source
λ
59. A photon’s life choices
Absorption
Diffusion
Reflection
Transparency
Refraction
Fluorescence
Subsurface scattering
Phosphorescence
Interreflection
light source
λ
60. A photon’s life choices
Absorption
Diffusion
Reflection
Transparency
Refraction
Fluorescence
Subsurface scattering
Phosphorescence
Interreflection
light source
λ
61. A photon’s life choices
Absorption
Diffusion
Reflection
Transparency
Refraction
Fluorescence
Subsurface scattering
Phosphorescence
Interreflection
light source
λ1
λ2
62. A photon’s life choices
Absorption
Diffusion
Reflection
Transparency
Refraction
Fluorescence
Subsurface scattering
Phosphorescence
Interreflection
light source
λ
63. A photon’s life choices
Absorption
Diffusion
Reflection
Transparency
Refraction
Fluorescence
Subsurface scattering
Phosphorescence
Interreflection
light source
t=1
t=n
64. A photon’s life choices
Absorption
Diffusion
Reflection
Transparency
Refraction
Fluorescence
Subsurface scattering
Phosphorescence
Interreflection
light source
λ
(Specular Interreflection)
65. A photon’s life choices
Lambertian Reflectance• In computer vision, surfaces are often
assumed to be ideal diffuse reflectors with
know dependence on viewing direction.
66. A photon’s life choices
Обратная трассировка лучей67. A photon’s life choices
Digital camera• A digital camera replaces film with a sensor
array
– Each cell in the array is light-sensitive diode that converts photons to electrons
– Two common types
• Charge Coupled Device (CCD)
• CMOS
– http://electronics.howstuffworks.com/digital-camera.htm
Slide by Steve Seitz
68. A photon’s life choices
Sensor ArrayCMOS sensor
69. Lambertian Reflectance
Sampling and Quantization70. Обратная трассировка лучей
Interlace vs. progressive scanhttp://www.axis.com/products/video/camera/progressive_scan.htm
Slide by Steve Seitz
71. Digital camera
Progressive scanhttp://www.axis.com/products/video/camera/progressive_scan.htm
Slide by Steve Seitz
72. Sensor Array
Interlacehttp://www.axis.com/products/video/camera/progressive_scan.htm
Slide by Steve Seitz
73. Sampling and Quantization
Rolling Shutter74. Interlace vs. progressive scan
The Eye• The human eye is a camera!
– Iris - colored annulus with radial muscles
– Pupil - the hole (aperture) whose size is controlled by the iris
– photoreceptor cells (rods and cones) in the retina
– What’s the “film”?
Slide by Steve Seitz
75. Progressive scan
The RetinaCross-section of eye
Cross section of retina
Pigmented
epithelium
Ganglion axons
Ganglion cell layer
Bipolar cell layer
Receptor layer
76. Interlace
What humans don’t have: tapetumlucidum
77. Rolling Shutter
Two types of light-sensitive receptorsCones
cone-shaped
less sensitive
operate in high light
color vision
Rods
rod-shaped
highly sensitive
operate at night
gray-scale vision
© Stephen E. Palmer, 2002
78. The Eye
Rod / Cone sensitivity79. The Retina
Distribution of Rods and Cones# Receptors/mm2
.
Fovea
150,000
Rods
Blind
Spot
Rods
100,000
50,000
0
Cones
Cones
80 60 40 20 0
20 40 60 80
Visual Angle (degrees from fovea)
Night Sky: why are there more stars off-center?
Averted vision: http://en.wikipedia.org/wiki/Averted_vision
© Stephen E. Palmer, 2002
80. Retina up-close
Eye Movements• Saccades
Can be consciously controlled. Related to perceptual attention.
200ms to initiation, 20 to 200ms to carry out. Large amplitude.
• Microsaccades
Involuntary. Smaller amplitude. Especially evident during
prolonged fixation. Function debated.
• Ocular microtremor (OMT)
involuntary. high frequency (up to 80Hz), small amplitude.
81. What humans don’t have: tapetum lucidum
Electromagnetic SpectrumHuman Luminance Sensitivity Function
http://www.yorku.ca/eye/photopik.htm
82.
Visible LightWhy do we see light of these wavelengths?
…because that’s where the
Sun radiates EM energy
© Stephen E. Palmer, 2002
83. Rod / Cone sensitivity
The Physics of LightAny patch of light can be completely described
physically by its spectrum: the number of photons
(per time unit) at each wavelength 400 - 700 nm.
# Photons
(per ms.)
400 500
600
700
Wavelength (nm.)
© Stephen E. Palmer, 2002
84.
The Physics of LightSome examples of the spectra of light sources
.
B. Gallium Phosphide Crystal
# Photons
# Photons
A. Ruby Laser
400 500
600
700
400 500
Wavelength (nm.)
700
Wavelength (nm.)
D. Normal Daylight
# Photons
C. Tungsten Lightbulb
# Photons
600
400 500
600
700
400 500
600
700
© Stephen E. Palmer, 2002
85. Eye Movements
The Physics of Light% Photons Reflected
Some examples of the reflectance spectra of surfaces
Red
400
Yellow
700 400
Blue
700 400
Wavelength (nm)
Purple
700 400
700
© Stephen E. Palmer, 2002
86. Electromagnetic Spectrum
The Psychophysical CorrespondenceThere is no simple functional description for the perceived
color of all lights under all viewing conditions, but …...
A helpful constraint:
Consider only physical spectra with normal distributions
mean
area
# Photons
400
500
variance
600
700
Wavelength (nm.)
© Stephen E. Palmer, 2002
87.
The Psychophysical Correspondence# Photons
Mean
blue
Hue
green yellow
Wavelength
© Stephen E. Palmer, 2002
88.
The Psychophysical Correspondence# Photons
Variance
Saturation
hi. high
med. medium
low
low
Wavelength
© Stephen E. Palmer, 2002
89.
The Psychophysical CorrespondenceArea
Brightness
# Photons
B. Area
Lightness
bright
dark
Wavelength
© Stephen E. Palmer, 2002
90.
Physiology of Color VisionThree kinds of cones:
440
RELATIVE ABSORBANCE (%)
.
530 560 nm.
100
S
M
L
50
400
450
500
550
600 650
WAVELENGTH (nm.)
• Why are M and L cones so close?
• Why are there 3?
© Stephen E. Palmer, 2002
91.
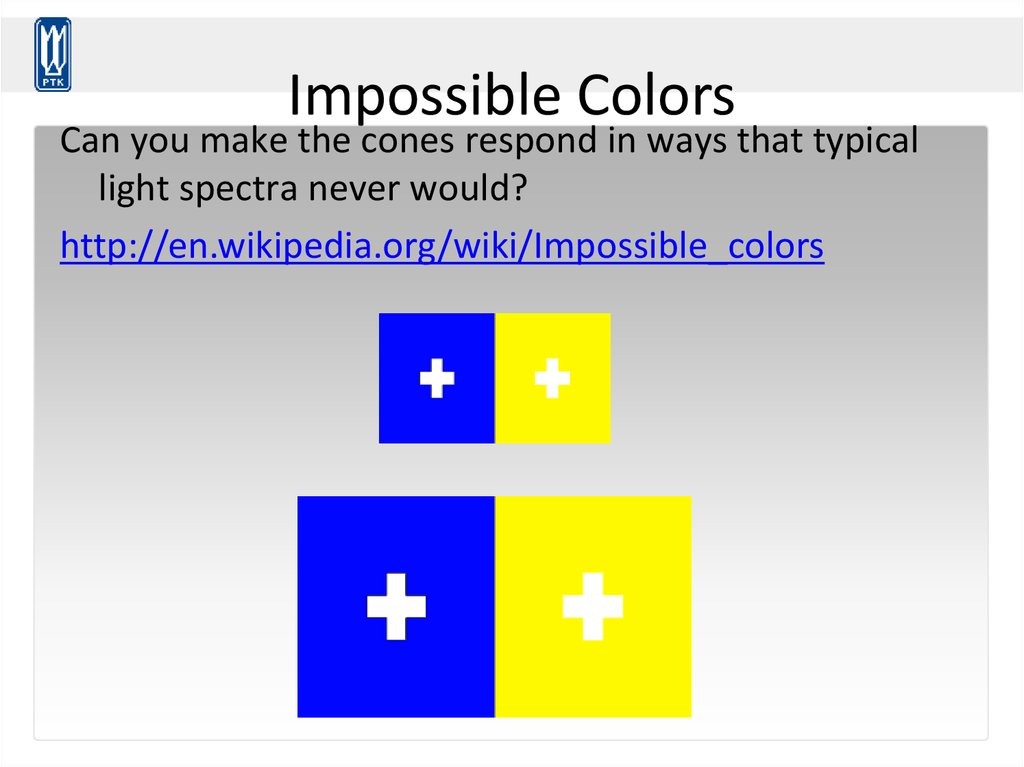
Impossible ColorsCan you make the cones respond in ways that typical
light spectra never would?
http://en.wikipedia.org/wiki/Impossible_colors
92.
TetrachromatismBird cone
responses
• Most birds, and many other animals, have
cones for ultraviolet light.
• Some humans, mostly female, seem to
have slight tetrachromatism.
93.
More Spectrametamers
94.
Practical Color Sensing: Bayer Grid• Estimate RGB
at ‘G’ cells
from
neighboring
values
Slide by Steve Seitz
95.
Color ImageR
G
B
96. Impossible Colors
Imagesin
Matlab
Images represented as a matrix
• Suppose we have a NxM RGB image called “im”
– im(1,1,1) = top-left pixel value in R-channel
– im(y, x, b) = y pixels down, x pixels to right in the bth
channel
– im(N, M, 3) = bottom-right pixel in B-channel
• imread(filename)
returns
a
uint8
image
(values
0
to
column
255)
row 0.92 0.93 0.94 0.97 0.62 0.37 0.85 0.97 0.93 0.92 0.99 R
– Convert
to double
0 to0.911) 0.92
with im2double
0.89 0.72
0.51 0.55 format
0.51 0.42 (values
0.57 0.41 0.49
G
0.92 0.93 0.94 0.97 0.62 0.37 0.85 0.97 0.93 0.92 0.99
0.95
0.89
0.82
0.89
0.56
0.31
0.75
0.92
0.81
0.95
0.91
0.96
0.71
0.49
0.86
0.96
0.69
0.79
0.91
0.95
0.81
0.62
0.84
0.67
0.49
0.73
0.94
0.88
0.95
0.81
0.89
0.60
0.96
0.74
0.71
0.54
0.49
0.56
0.86
0.90
0.96
0.89
0.69
0.79
0.91
0.94
0.89
0.87
0.72
0.58
0.95
0.58
0.81
0.85
0.62
0.66
0.84
0.67
0.67
0.49
0.49
0.73
0.94
0.56
0.82
0.57
0.51
0.92
0.50
0.88
0.95
0.51
0.81
0.89
0.48
0.60
0.96
0.43
0.74
0.71
0.33
0.54
0.49
0.41
0.56
0.86
0.90
0.96
0.89
0.69
0.79
0.91
0.46
0.89
0.37
0.55
0.93
0.60
0.94
0.89
0.39
0.87
0.72
0.37
0.58
0.95
0.42
0.58
0.81
0.61
0.85
0.62
0.78
0.66
0.84
0.67
0.67
0.49
0.49
0.73
0.94
0.91
0.56
0.80
0.51
0.94
0.58
0.56
0.82
0.73
0.57
0.51
0.88
0.50
0.88
0.77
0.51
0.81
0.69
0.48
0.60
0.78
0.43
0.74
0.33
0.54
0.41
0.56
0.90
0.89
0.87
0.31
0.88
0.42
0.97
0.50
0.46
0.89
0.92
0.37
0.55
0.90
0.60
0.94
0.73
0.39
0.87
0.79
0.37
0.58
0.77
0.42
0.58
0.61
0.85
0.78
0.66
0.67
0.49
0.90
0.75
0.89
0.57
0.62
0.61
0.91
0.56
0.91
0.80
0.51
0.94
0.58
0.56
0.71
0.73
0.57
0.73
0.88
0.50
0.89
0.77
0.51
0.69
0.48
0.78
0.43
0.33
0.41
0.97
0.92
0.79
0.41
0.37
0.45
0.87
0.31
0.49
0.88
0.42
0.82
0.50
0.46
0.90
0.92
0.37
0.93
0.90
0.60
0.99
0.73
0.39
0.79
0.37
0.77
0.42
0.61
0.78
0.95
0.81
0.85
0.49
0.85
0.33
0.90
0.75
0.74
0.89
0.57
0.93
0.61
0.91
0.99
0.91
0.80
0.97
0.94
0.58
0.93
0.71
0.73
0.73
0.88
0.89
0.77
0.69
0.78
0.95
0.91
0.97
0.97
0.92
0.79
0.41
0.45
0.87
0.49
0.88
0.82
0.50
0.90
0.92
0.93
0.90
0.99
0.73
0.79
0.77
0.91
0.92
0.93
0.95
0.81
0.85
0.49
0.33
0.90
0.74
0.89
0.93
0.61
0.99
0.91
0.97
0.94
0.93
0.71
0.73
0.89
0.92
0.95
0.91
0.97
0.79
0.45
0.49
0.82
0.90
0.93
0.99
0.99
0.91
0.92
0.95
0.85
0.33
0.74
0.93
0.99
0.97
0.93
B
97. Tetrachromatism
Color spaces• How can we represent color?
http://en.wikipedia.org/wiki/File:RGB_illumination.jpg
98. More Spectra
Color spaces: RGBDefault color space
0,1,0
R
(G=0,B=0)
G
1,0,0
(R=0,B=0)
0,0,1
Some drawbacks
B
(R=0,G=0)
• Strongly correlated channels
• Non-perceptual
Image from: http://en.wikipedia.org/wiki/File:RGB_color_solid_cube.png
99. Color Sensing in Camera (RGB)
Color spaces: HSVIntuitive color space
H
(S=1,V=1)
S
(H=1,V=1)
V
(H=1,S=0)
100. Practical Color Sensing: Bayer Grid
Color spaces: YCbCrFast to compute, good for
compression, used by TV
Y=0
Y=0.5
Y
(Cb=0.5,Cr=0.5)
Cr
Cb
Cb
(Y=0.5,Cr=0.5)
Y=1
Cr
(Y=0.5,Cb=05)
101. Color Image
Color spaces: L*a*b*“Perceptually uniform”* color space
L
(a=0,b=0)
a
(L=65,b=0)
b
(L=65,a=0)
102. Images in Matlab
If you had to choose, would you rathergo without luminance or
chrominance?
103. Color spaces
If you had to choose, would you rathergo without luminance or
chrominance?
104. Color spaces: RGB
Most information in intensityOnly color shown – constant intensity
105. Color spaces: HSV
Most information in intensityOnly intensity shown – constant color
106. Color spaces: YCbCr
Most information in intensityOriginal image
107. Color spaces: L*a*b*
Back to grayscale intensity0.92
0.95
0.89
0.96
0.71
0.49
0.86
0.96
0.69
0.79
0.91
0.93
0.89
0.72
0.95
0.81
0.62
0.84
0.67
0.49
0.73
0.94
0.94
0.82
0.51
0.88
0.81
0.60
0.74
0.54
0.56
0.90
0.89
0.97
0.89
0.55
0.94
0.87
0.58
0.58
0.85
0.66
0.67
0.49
0.62
0.56
0.51
0.56
0.57
0.50
0.51
0.48
0.43
0.33
0.41
0.37
0.31
0.42
0.46
0.37
0.60
0.39
0.37
0.42
0.61
0.78
0.85
0.75
0.57
0.91
0.80
0.58
0.73
0.88
0.77
0.69
0.78
0.97
0.92
0.41
0.87
0.88
0.50
0.92
0.90
0.73
0.79
0.77
0.93
0.81
0.49
0.90
0.89
0.61
0.91
0.94
0.71
0.73
0.89
0.92
0.95
0.91
0.97
0.79
0.45
0.49
0.82
0.90
0.93
0.99
0.99
0.91
0.92
0.95
0.85
0.33
0.74
0.93
0.99
0.97
0.93
108. If you had to choose, would you rather go without luminance or chrominance?
ДальшеВосприятие света и цвета
Камера и человеческий глаз
Сенсоры и пиксели
Фильтрация изображений
Практическое задание: линейные фильтры
109. If you had to choose, would you rather go without luminance or chrominance?
ОССУ
УД
ДА
АР
РС
СТ
ТВ
ВЕ
ЕН
НН
НЫ
ЫЙ
Й
ГГ О
НА
АУ
УЧ
ЧН
НЫ
ЫЙ
Й
Н
ЦЕ
ЕН
Н ТТ Р
Р
Ц
РО
ОС
СС
СИ
ИИ
И
Р
ЦЕНТРАЛЬНЫЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ И ОПЫТНО-КОНСТРУКТОРСКИЙ
ИНСТИТУТ РОБОТОТЕХНИКИ И ТЕХНИЧЕСКОЙ КИБЕРНЕТИКИ
Спасибо за внимание!
Россия, 194064, г. Санкт-Петербург, Тихорецкий пр., 21
тел.: (812) 552-0110 (812) 552-1325 факс: (812) 556-3692 http://www.rtc.ru e-mail: rtc@rtc.ru