


















 electronics
electronicsSimilar presentations:
")


")


")


")
SHERPA promalp 3 – портативное электрическое устройство высокой удельной мощности
1. SHERPA promalp 3 – портативное электрическое устройство высокой удельной мощности
Инновации на службе спасения©Booster Team 2017
2. Содержание:
Введение.Sherpa promalp 3. Общее описание. Области применения устройства.
Sherpa promalp 3. Техническое описание.
3.1. Описание конструкции устройства.
3.2. Описание силовой и управляющей электроники устройства.
3.3. Технические характеристики устройства.
4. Дополнительные возможности устройства.
4.1. Установка диска УШМ (использование устройства в качестве болгарки).
4.2. Моторизация велосипедов, самокатов и инвалидных колясок.
5. Приложения
1.
2.
3.
©Booster Team 2017
3. Команда Booster на данный момент уже разработала и изготовила действующие прототипы двух устройств – это аккумуляторный
1. Введение:Команда Booster на данный момент уже разработала и изготовила действующие прототипы двух устройств
– это аккумуляторный портативный горнолыжный подъемник Booster Pro Ski и аккумуляторную
портативную лебедку Booster Pro Alp. В обоих устройствах используются самые современные электронные и
электромеханические компоненты и детали. Сверхмощные электродвигатели на основе неодимовых магнитов
и современные емкие литий-полимерные аккумуляторы позволили нам добиться максимально возможного на
данный момент соотношения мощности к весу. Оба устройства имеют возможность управляться
дистанционно с радиопульта, плавную регулировку скорости, реверс.
Особенностью устройств является то, что они пропускают шнур через систему роликов и оставляют после
себя, а не наматывают на барабан – это позволяет избежать ограничений в длине веревки.
Рис 1: Схема: как использовать приспособление.
©Booster Team 2017
4. 2. Sherpa promalp 3. Общее описание. Области применения устройства.
Sherpa promalp 3 – это портативная аккумуляторная лебедка (подъемник) с ручным управлением ирадиоуправлением, плавной регулировкой скорости и реверсом. Sherpa promalp 3 – новый образец, в
устройстве которого будут учтены все недостатки конструкции предыдущей версии и пожелания
профессионалов, работавших с ней. Устройство будет работать с альпинистской веревкой 10 и 11
мм, сертифицированной по стандарту EN1891. Подъемник может иметь множество применений. На
данный момент при помощи опытного образца было собрано 2 скалодрома и несколько рекламных
конструкций – в основном устройство поднимало грузы с большим весом.
©Booster Team 2017
5.
Области применения устройства:Горные поисково-спасательные отряды – транспортировка грузов и людей в горных условиях.
Фрира́йд – катание на сноуборде или горных лыжах вне подготовленных трасс и, как правило, вне области
обслуживания горнолыжной индустрии.
Использование в качестве портативного подъемника в парках (катание на ватрушках, снегокатах, и т.п.).
Строительные и монтажные работы – доставка грузов на высоту: высотные здания, антенны, вышки,
трубы.
Спелеотуризм – транспортировка спелеологов и грузов в условиях пещер.
Промышленный альпинизм – выполнения высотных работ на сооружениях в труднодоступных местах без
использования строительных лесов, люлек, громоздких подъёмных механизмов и т.п.
Аварийно-спасательная служба: проведение спасательных работ в городских и промышленных условиях
(доставка грузов и спасателей на высоту, спуск пострадавших).
©Booster Team 2017
6. 3. Sherpa promalp 3. Техническое описание.
3.1 Описание конструкции устройства.На рисунках 1, 2, 3, 4 показан общий вид устройства и назначение основных элементов конструкции.
Рисунок 1. Общий вид устройства
©Booster Team 2017
7.
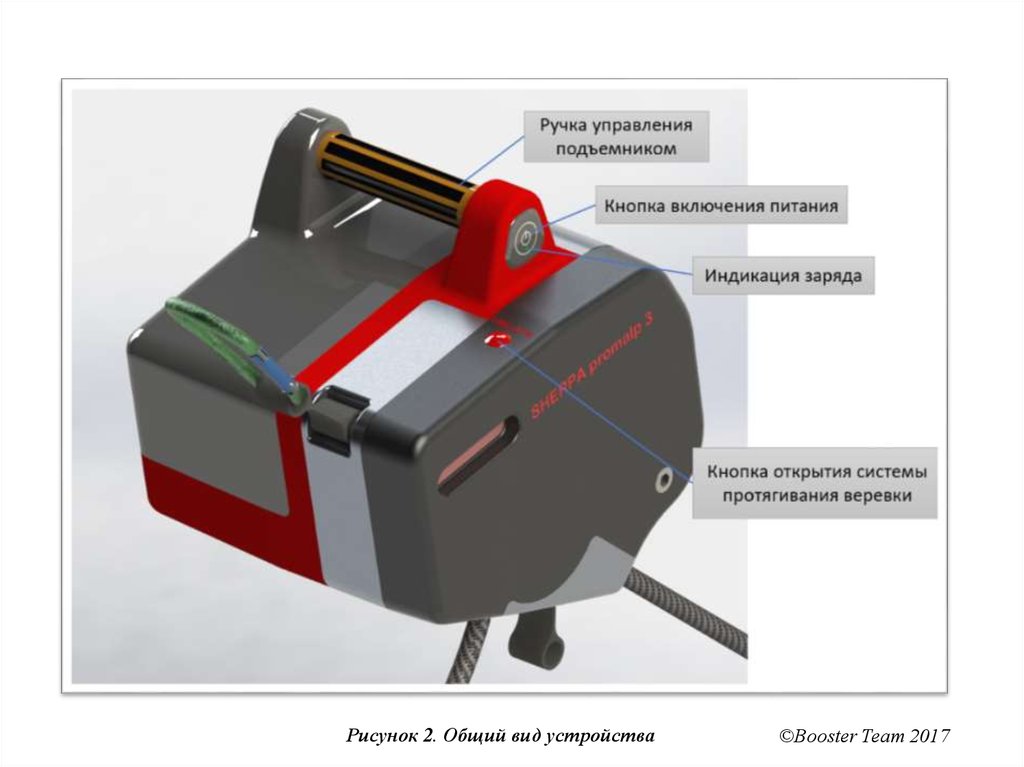
Рисунок 2. Общий вид устройства©Booster Team 2017
8.
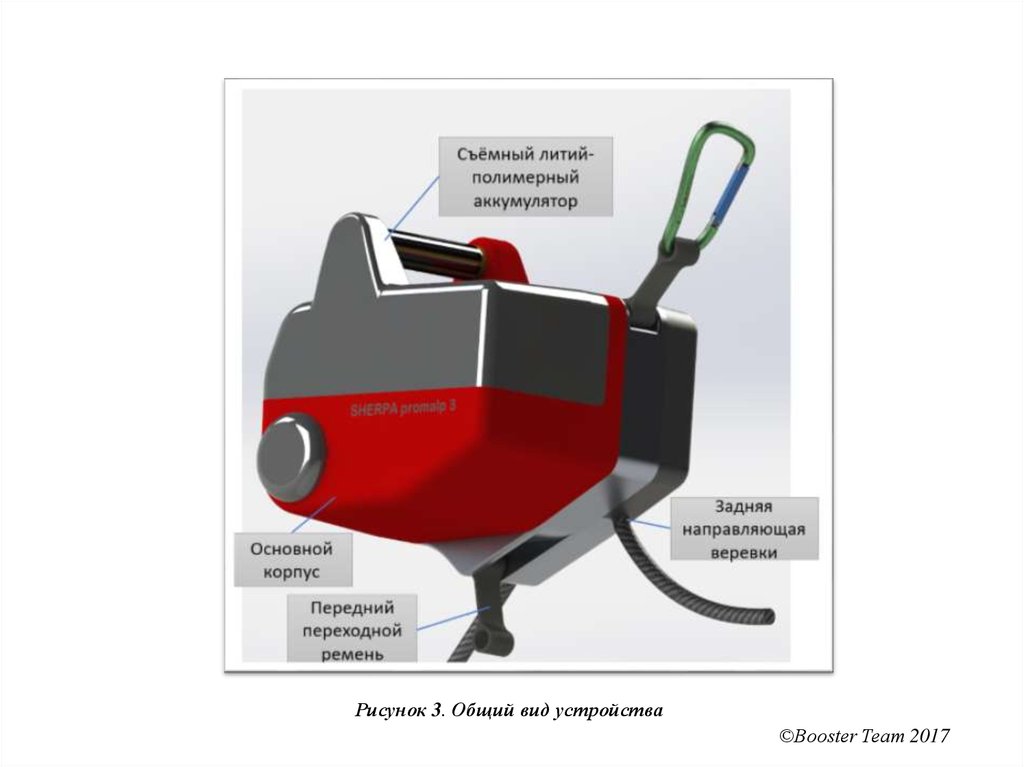
Рисунок 3. Общий вид устройства©Booster Team 2017
9.
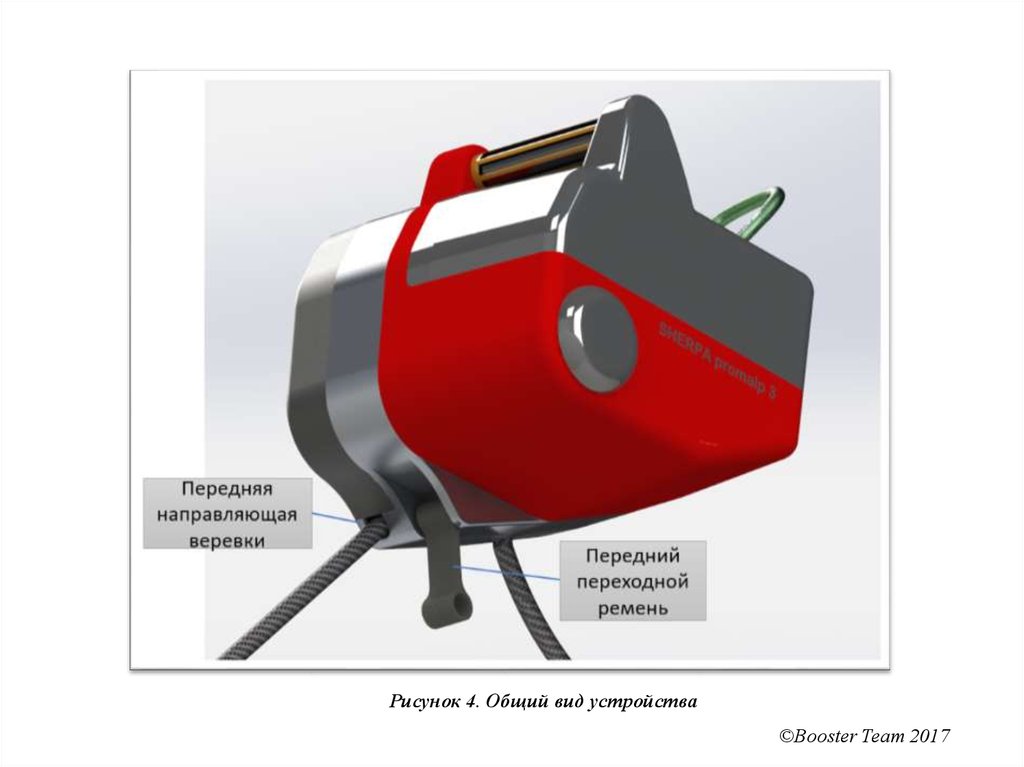
Рисунок 4. Общий вид устройства©Booster Team 2017
10.
Основной корпус выполнен из ударопрочного пластика, корпус съемного аккумулятора из ударопрочногопластика с резиновым покрытием. Корпус редуктора и крышка системы протягивания веревки
выполнены из алюминиевого сплава. Направляющие веревки выполнены из закалённой стали и находятся
внутри крышки системы протягивания.
На рисунках 5, 6, 7, 8 показан принцип действия устройства и работа с ним.
©Booster Team 2017
11.
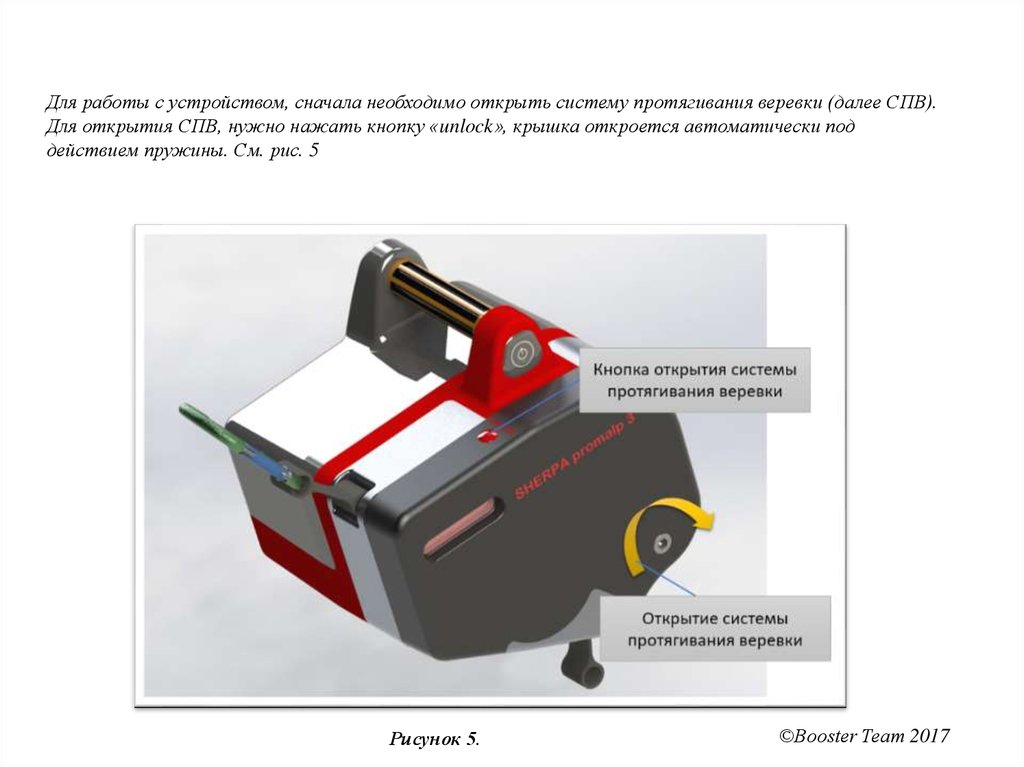
Для работы с устройством, сначала необходимо открыть систему протягивания веревки (далее СПВ).Для открытия СПВ, нужно нажать кнопку «unlock», крышка откроется автоматически под
действием пружины. См. рис. 5
Рисунок 5.
©Booster Team 2017
12.
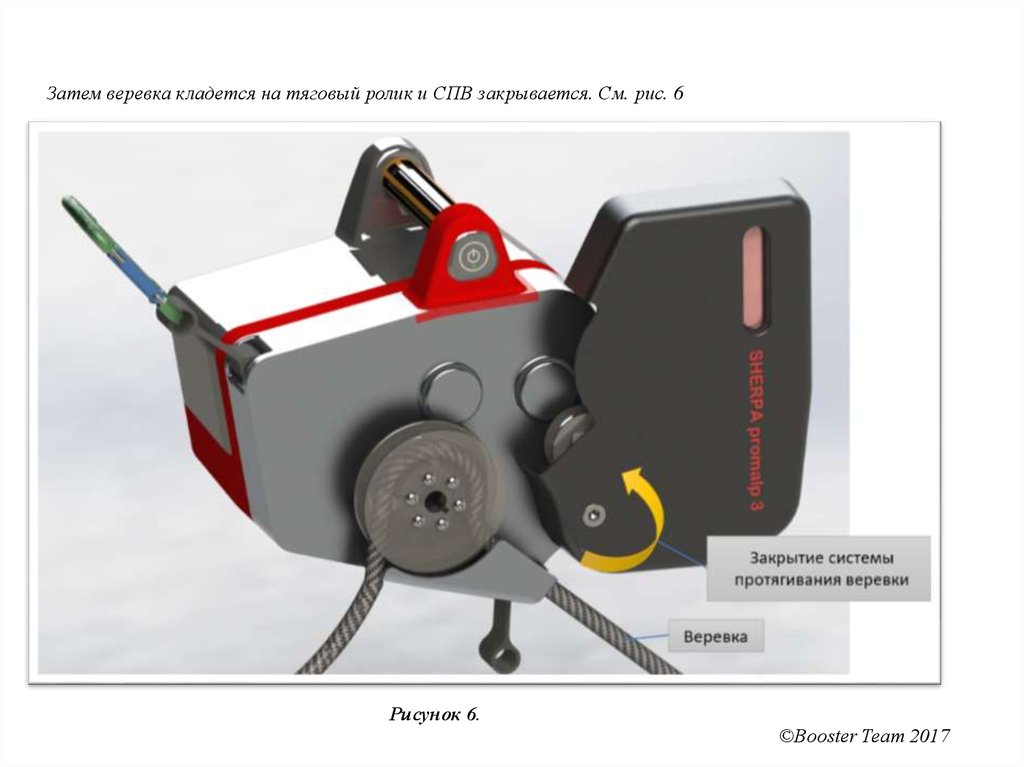
Затем веревка кладется на тяговый ролик и СПВ закрывается. См. рис. 6Рисунок 6.
©Booster Team 2017
13.
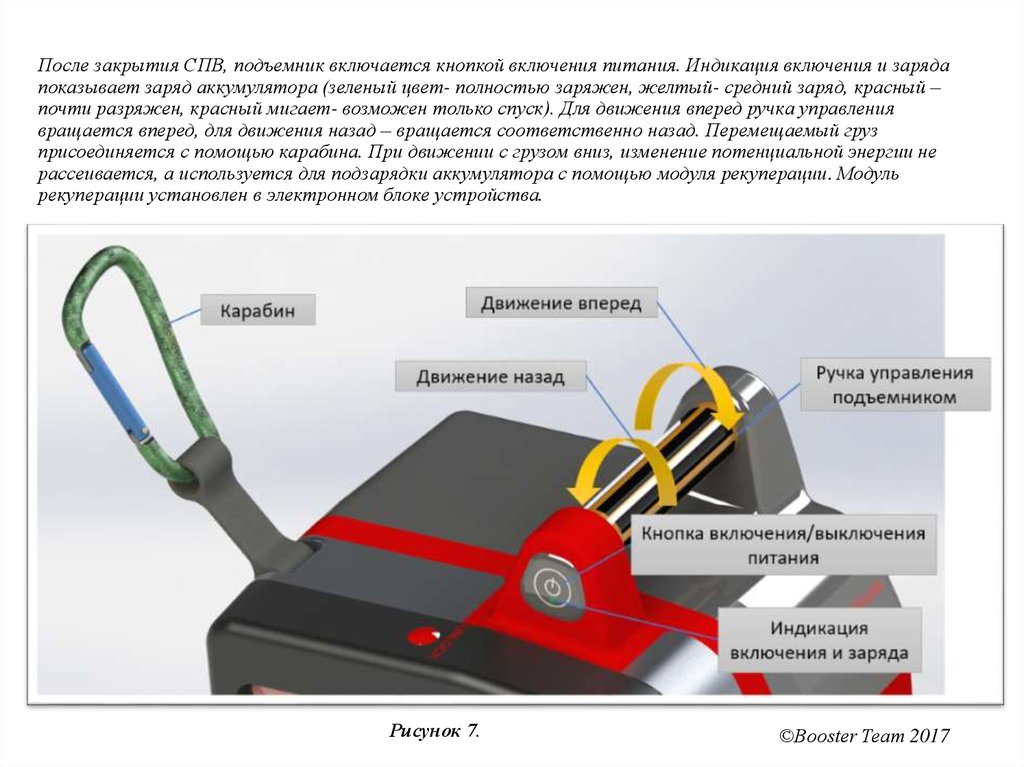
После закрытия СПВ, подъемник включается кнопкой включения питания. Индикация включения и зарядапоказывает заряд аккумулятора (зеленый цвет- полностью заряжен, желтый- средний заряд, красный –
почти разряжен, красный мигает- возможен только спуск). Для движения вперед ручка управления
вращается вперед, для движения назад – вращается соответственно назад. Перемещаемый груз
присоединяется с помощью карабина. При движении с грузом вниз, изменение потенциальной энергии не
рассеивается, а используется для подзарядки аккумулятора с помощью модуля рекуперации. Модуль
рекуперации установлен в электронном блоке устройства.
Рисунок 7.
©Booster Team 2017
14.
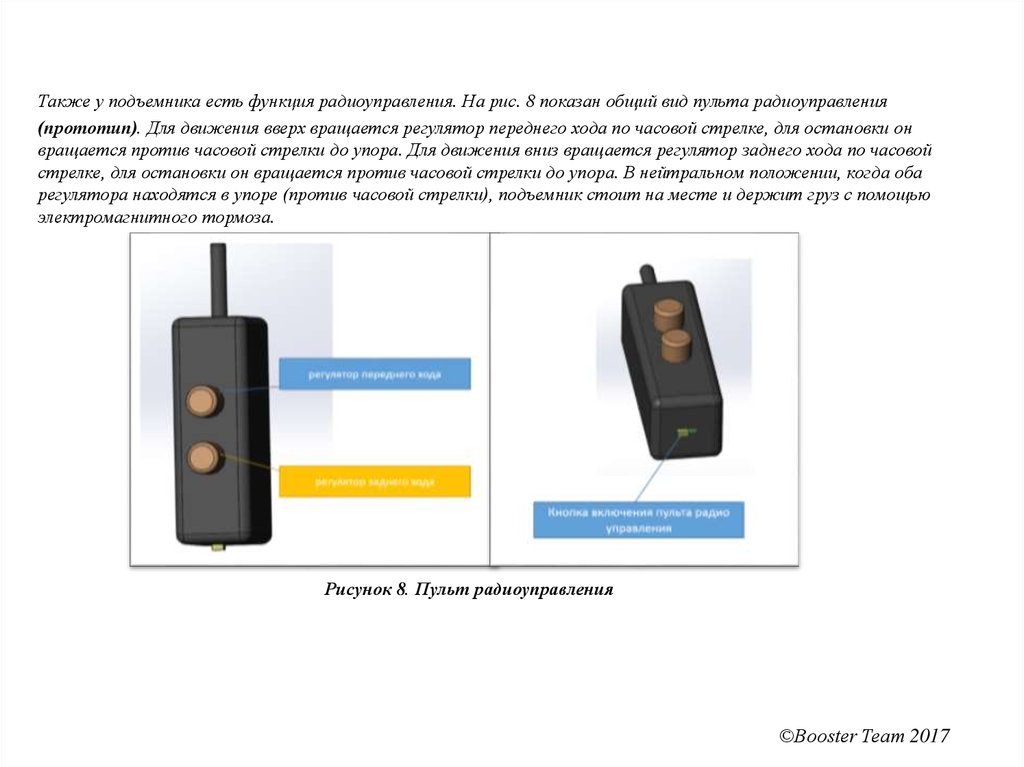
Также у подъемника есть функция радиоуправления. На рис. 8 показан общий вид пульта радиоуправления(прототип). Для движения вверх вращается регулятор переднего хода по часовой стрелке, для остановки он
вращается против часовой стрелки до упора. Для движения вниз вращается регулятор заднего хода по часовой
стрелке, для остановки он вращается против часовой стрелки до упора. В нейтральном положении, когда оба
регулятора находятся в упоре (против часовой стрелки), подъемник стоит на месте и держит груз с помощью
электромагнитного тормоза.
Рисунок 8. Пульт радиоуправления
©Booster Team 2017
15.
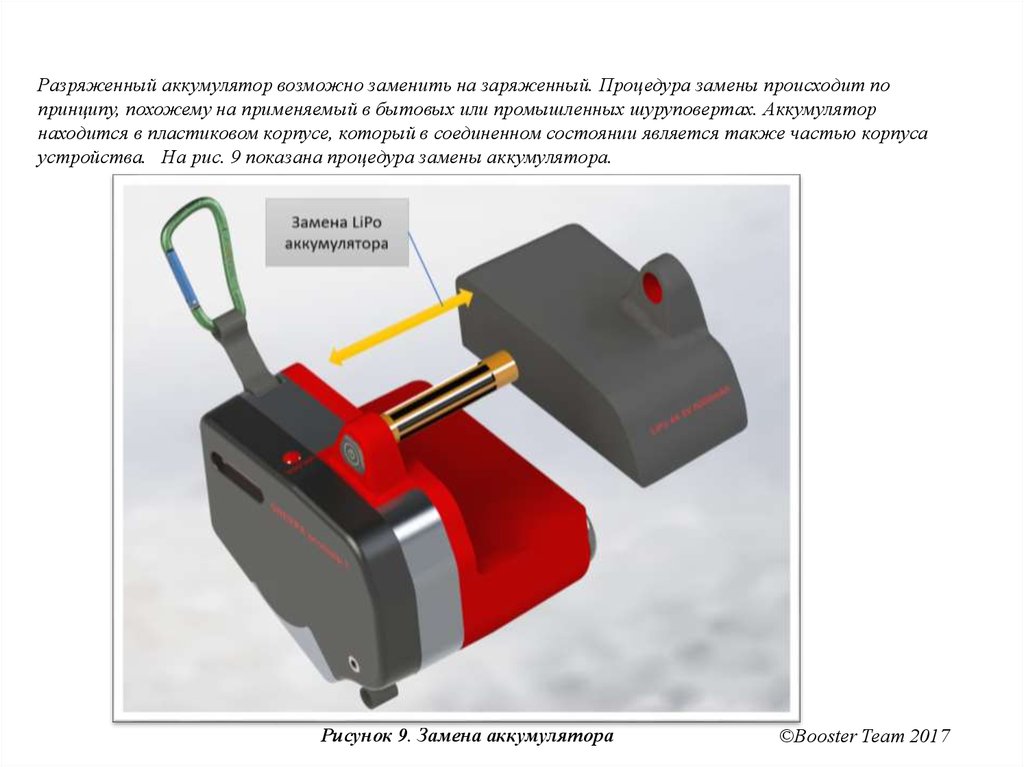
Разряженный аккумулятор возможно заменить на заряженный. Процедура замены происходит попринципу, похожему на применяемый в бытовых или промышленных шуруповертах. Аккумулятор
находится в пластиковом корпусе, который в соединенном состоянии является также частью корпуса
устройства. На рис. 9 показана процедура замены аккумулятора.
Рисунок 9. Замена аккумулятора
©Booster Team 2017
16.
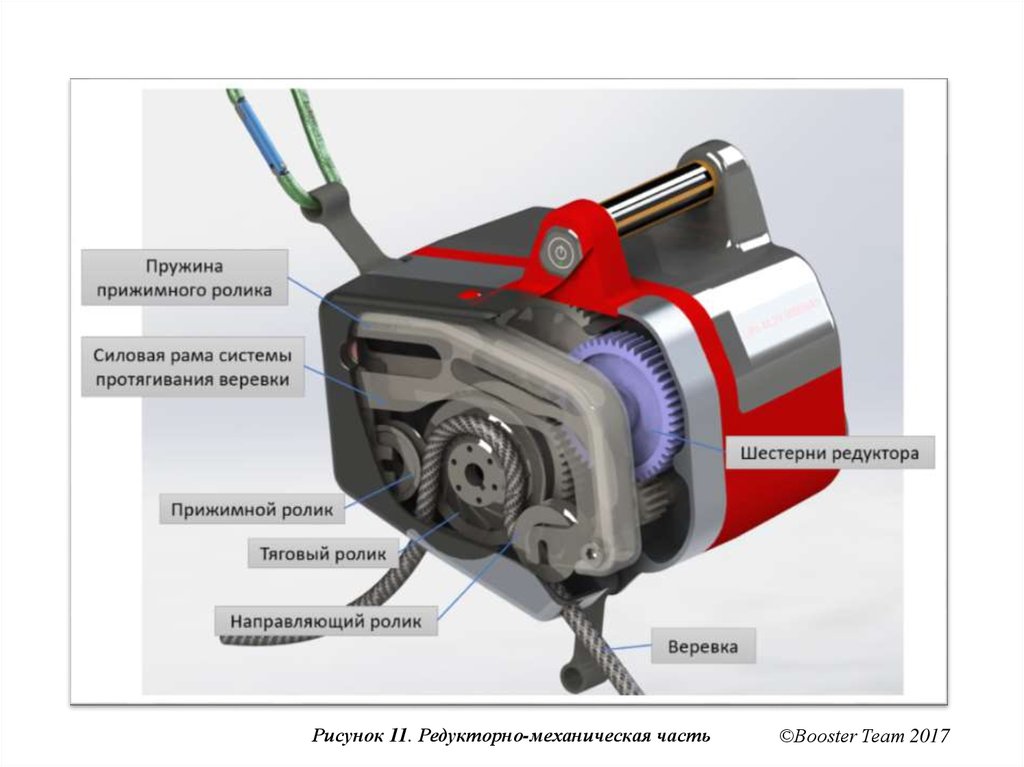
На рисунках 10, 11 показана внутренняя компоновка устройства. Корпус функционально разделён на 2части – Электросиловая часть и Редукторно-механическая часть. Корпус Электросиловой части
преимущественно выполнен из ударопрочного пластика, корпус Редукторно-механической – из
алюминиевых сплавов. Ролики, направляющие и шестерни выполнены из закалённой и нержавеющей
стали.
Рисунок 10. Электросиловая часть
©Booster Team 2017
17.
Рисунок 11. Редукторно-механическая часть©Booster Team 2017
18.
3.2 Описание силовой и управляющей электроники устройства.Краткое описание работы системы управления подъемника:
1. На радиомодуль поступает сигнал от пульта (или от регулятора ручного управления) («вверх", "вниз" с градациями
мощности и скорости вращения, и "стоп"). Потеря сигнала от передатчика также трактуется управляющей платой
(далее УП) как сигнал "стоп".
2. При команде "стоп" УП подает сигнал Системе блокировки/разблокировки (далее СБР) команду зажать тормоз.
Подъемник зафиксирован на веревке.
3. При команде "Вверх" УП в начале подает команду вращать двигатель на Силовой контроллер двигателя (СКД), а
затем подает команду разблокировки на СБР, а затем постепенно увеличивает мощность. Для разблокировки тормоза
СБР подает кратковременно слабое обратное напряжение на тормоз, чтобы снять остаточный магнетизм. При
увеличении "газа" УП просто дает команду на большую мощность, без контроля оборотов вращения.
4. При команде "Вниз" УП постепенно начинает отпускать тормоз, контролируя сигнал с Датчика холла (частота
вращения). Если частота вращения вала меньше заданной пультом, тормоз полностью разблокируется, управляющая
плата подает команду на Фазовый переключатель для смены направления вращения и УП подает команду на СКД
увеличения мощности двигателя до тех пор, пока частота вращения не станет равной заданной. Таким образом, при
спуске УП постоянно поддерживает частоту вращения равной заданной, увеличивая или уменьшая газ, и ток на тормозе.
Описанная схема является старой версией силовой и управляющей электроники (СУЭ) прототипа подъемника
Booster Pro Alp 1.
В данной схеме использован китайский контроллер управления бесколлекторным двигателем. Основным минусом его
применения является отсутствие реверса. Второй минус – небольшая задержка реакции на командный сигнал (т. к.
применяется ШИМ шифрование сигнала), что вызывает цикличное колебательное изменение скорости вращения
двигателя при спуске. Третий минус – низкий стартовый момент из-за неопределенности положения ротора, сейчас на
практике не вызывающий проблем благодаря большому избытку мощности двигателя.
Для осуществления реверса используется Фазовый переключатель на базе двух мощных реле. В данном решении имеется
два минуса:
1. Большие весогабаритные характеристики.
2. Применение контактной группы, что в теории увеличивает вероятность отказа.
Перечисленные проблемы должен решить разработанный контроллер. Реверс будет задаваться программно, реакция на
сигнал будет практически мгновенная т. к. управление контроллером будет цифровое и, наконец, стартовый момент
будет максимальный, т. к. положение ротора будет однозначно определяться 3 датчиками холла.
Также в новой модели подъемника будут добавлены следующие модули: система рекуперации, система защиты от
перегрузок, новое эргономичное зарядное устройство, аккумулятор в корпусе, пульт управления.
©Booster Team 2017
19.
Рисунок 12. Схема СУЭ Booster pro alp 1©Booster Team 2017
20.
Рисунок 13. Схема СУЭ Sherpa promalp 3©Booster Team 2017
21.
3.3 Технические характеристики устройства.Технические характеристики Sherpa promalp 3:
• Масса изделия с аккумулятором: 6-8 кг (уточняется в процессе разработки).
• Габаритные размеры (ДхШхВ) = 200х188х206 мм (уточняется в процессе разработки).
• Максимальный перепад высоты на 1 батарее: 400-600м при грузе 100 кг.
• Мощность двигателя: 2,7кВт.
• Время зарядки батареи: 1 час.
• Скорость движения: 3-4 км/час.
• Система рекуперации во время спуска грузов для подзарядки аккумулятора (При работе с системой
рекупирации высота подъема увеличивается до 600 м.).
• Максимальная масса операционного груза: 180 кг.
• Управление: кнопочное (на корпусе изделия) или радиопульт.
• Веревка 10 и 11 мм EN1891
• Степень пылевлагозащиты IP 67
©Booster Team 2017
22.
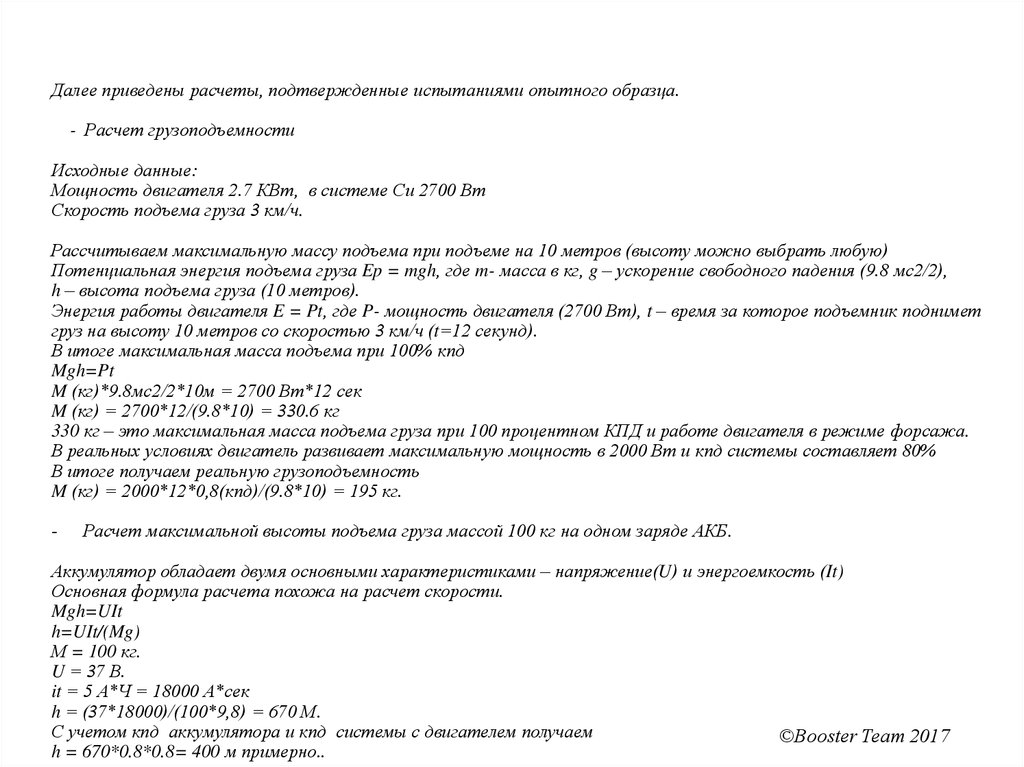
Далее приведены расчеты, подтвержденные испытаниями опытного образца.- Расчет грузоподъемности
Исходные данные:
Мощность двигателя 2.7 КВт, в системе Си 2700 Вт
Скорость подъема груза 3 км/ч.
Рассчитываем максимальную массу подъема при подъеме на 10 метров (высоту можно выбрать любую)
Потенциальная энергия подъема груза Ep = mgh, где m- масса в кг, g – ускорение свободного падения (9.8 мс2/2),
h – высота подъема груза (10 метров).
Энергия работы двигателя E = Pt, где P- мощность двигателя (2700 Вт), t – время за которое подъемник поднимет
груз на высоту 10 метров со скоростью 3 км/ч (t=12 секунд).
В итоге максимальная масса подъема при 100% кпд
Mgh=Pt
M (кг)*9.8мс2/2*10м = 2700 Вт*12 сек
M (кг) = 2700*12/(9.8*10) = 330.6 кг
330 кг – это максимальная масса подъема груза при 100 процентном КПД и работе двигателя в режиме форсажа.
В реальных условиях двигатель развивает максимальную мощность в 2000 Вт и кпд системы составляет 80%
В итоге получаем реальную грузоподъемность
M (кг) = 2000*12*0,8(кпд)/(9.8*10) = 195 кг.
-
Расчет максимальной высоты подъема груза массой 100 кг на одном заряде АКБ.
Аккумулятор обладает двумя основными характеристиками – напряжение(U) и энергоемкость (It)
Основная формула расчета похожа на расчет скорости.
Mgh=UIt
h=UIt/(Mg)
М = 100 кг.
U = 37 В.
it = 5 А*Ч = 18000 А*сек
h = (37*18000)/(100*9,8) = 670 М.
С учетом кпд аккумулятора и кпд системы с двигателем получаем
©Booster Team 2017
h = 670*0.8*0.8= 400 м примерно..
23. 4. Дополнительные возможности устройства.
Подъемник Sherpa promalp 3 – это электромеханическое устройство большой мощности и малого веса.Электросиловую установку подъемника можно использовать не только для подъема грузов по веревке, но
и как силовой модуль для других устройств, востребованных на рынке.
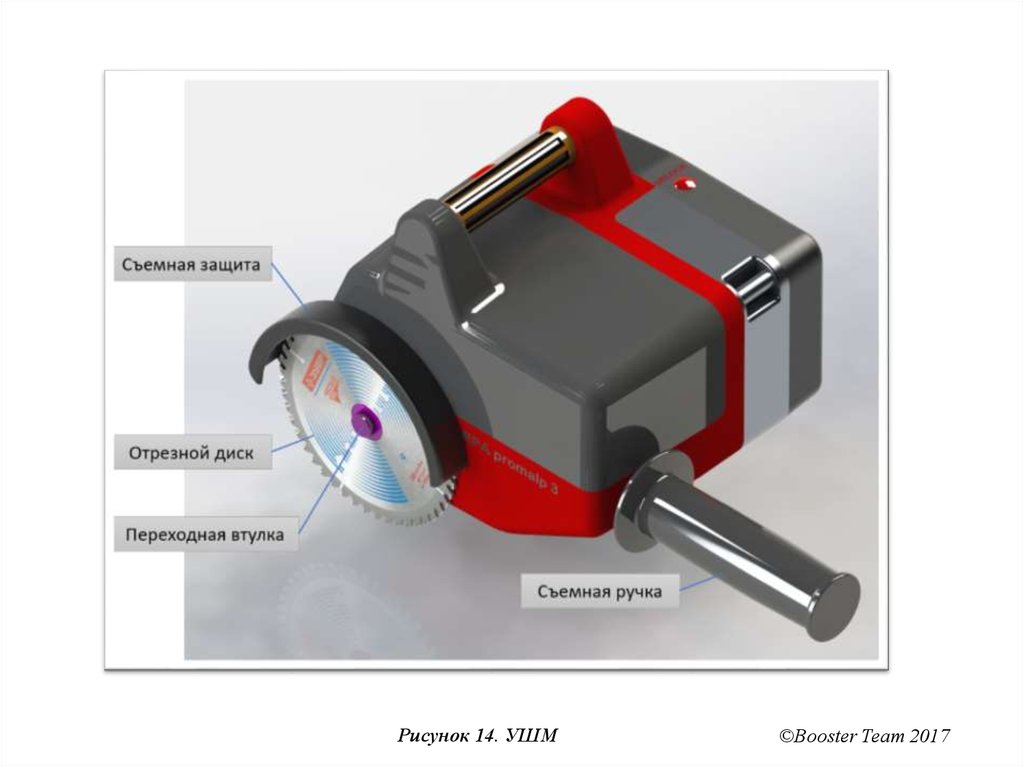
4.1 Установка диска УШМ (использование устройства в качестве болгарки).
Электродвигатель подъемника обладает мощностью 2.7 кВт (на форсаже) и частотой вращения 9000
об/мин, что сопоставимо по характеристикам с двигателями промышленных болгарок (УШМ). Поэтому
для установки диска УШМ на подъемник не требуется дополнительный редуктор, а только съемные
переходники.
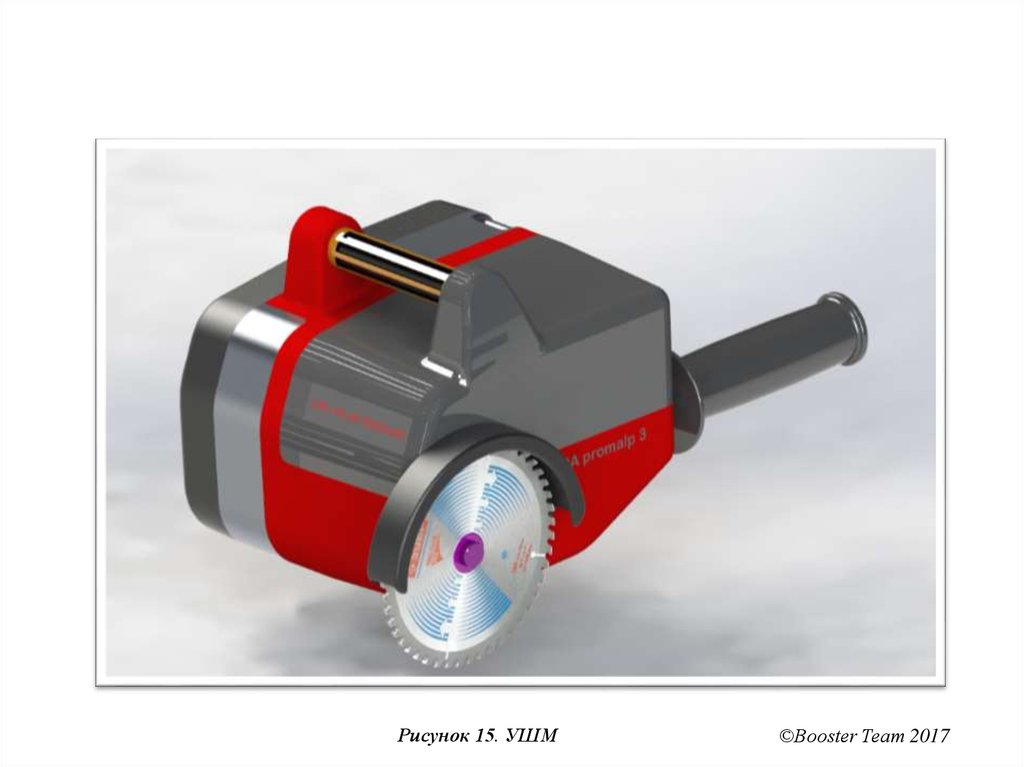
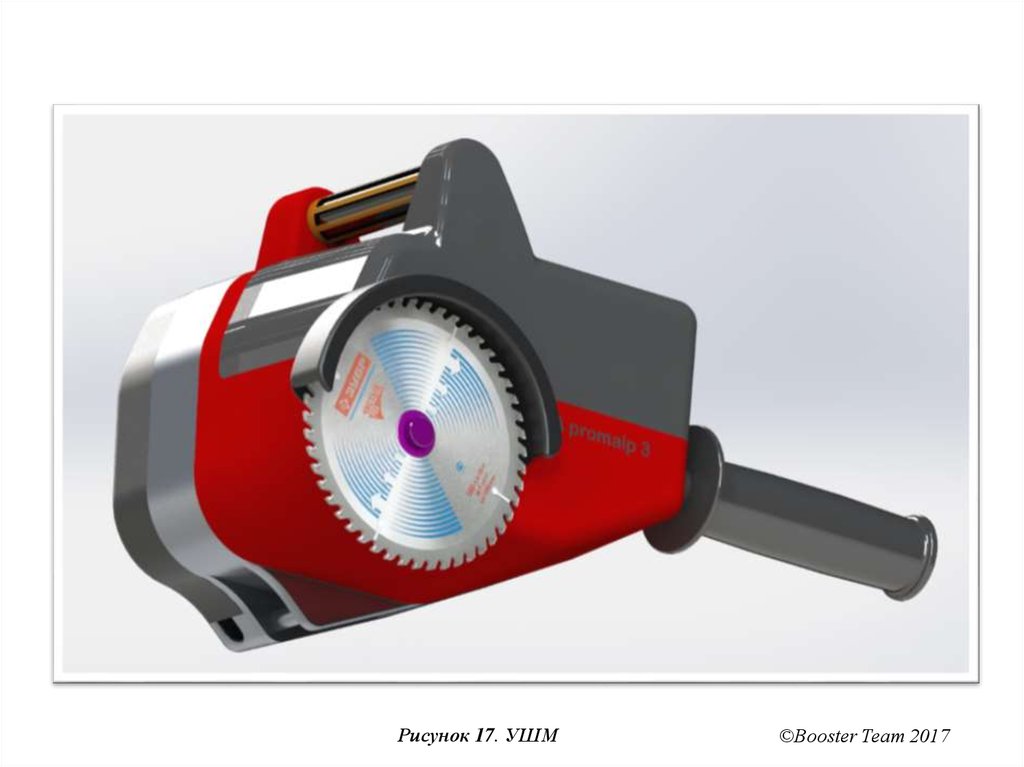
Расположение двигателя в подъемнике, а также его органов управления, тоже способствуют простому
переоборудования подъемника в УШМ. На рис. 14, 15, 16, 17 показан общий вид переоборудованного в
УШМ подъемника.
©Booster Team 2017
24.
Рисунок 14. УШМ©Booster Team 2017
25.
Рисунок 15. УШМ©Booster Team 2017
26.
Рисунок 16. УШМ©Booster Team 2017
27.
Рисунок 17. УШМ©Booster Team 2017
28.
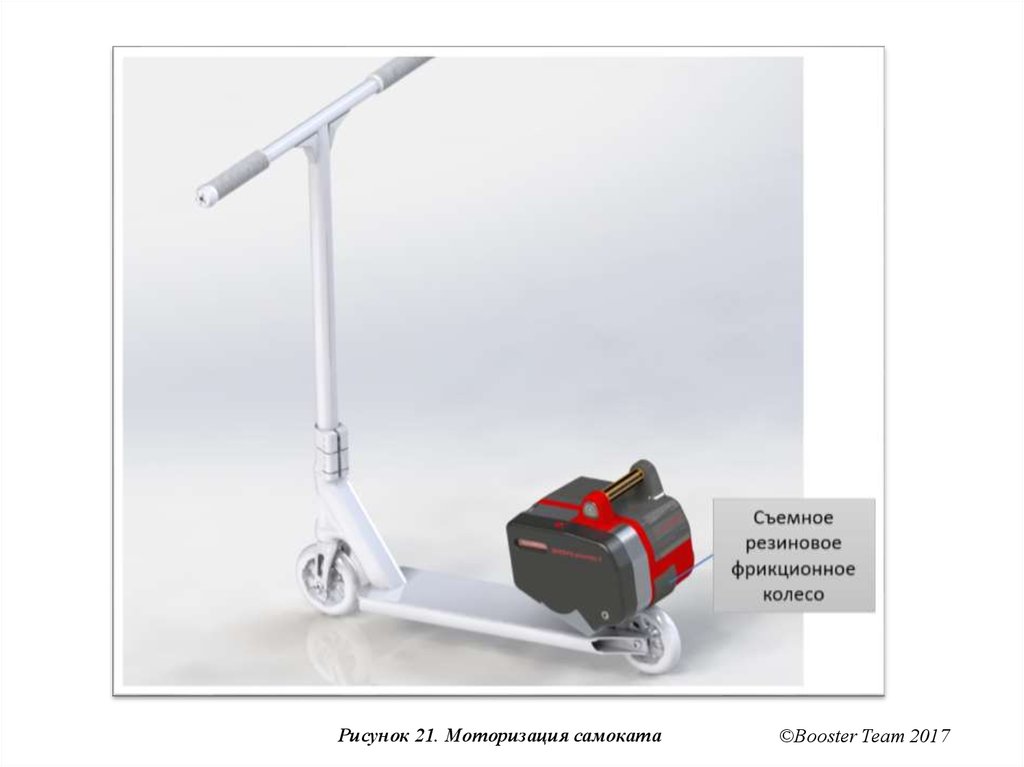
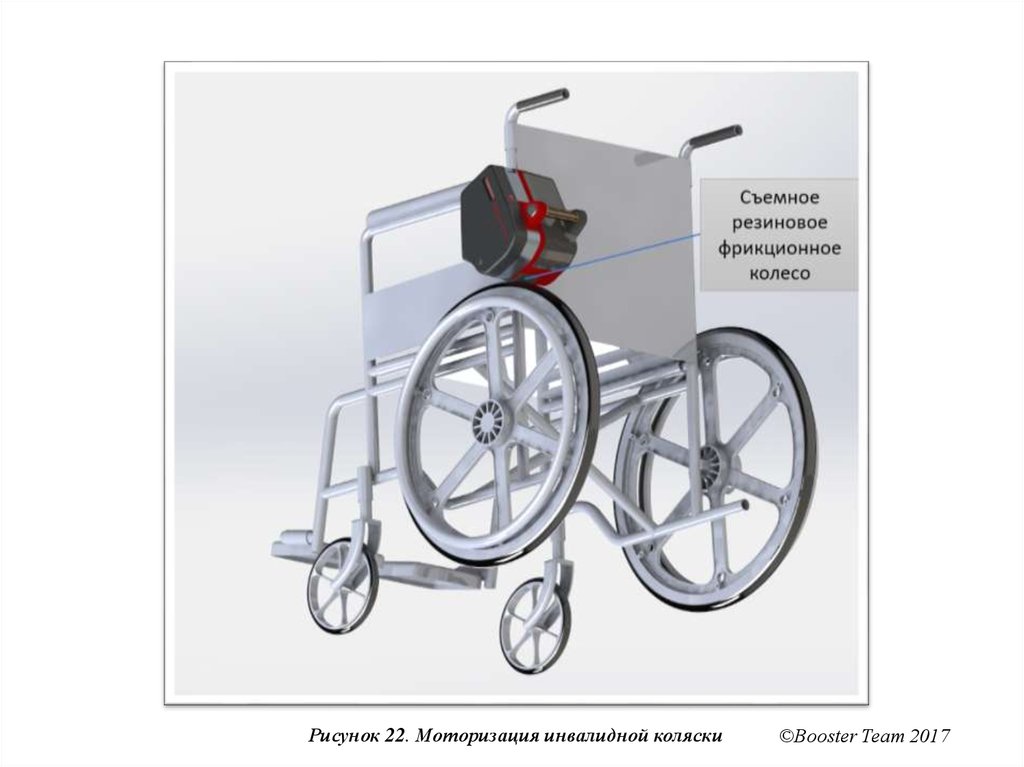
4.1 Моторизация велосипедов, самокатов и инвалидных колясок.Мощность и компактность подъемника также позволяет использовать его для моторизации легких
транспортных средств, таких, как велосипед, самокат и инвалидная коляска. Для этого (эскизная
разработка) непосредственно на вращающуюся часть двигателя устанавливается резиновое
фрикционное колесо. Это колесо служит для передачи крутящего момента от двигателя подъемника к
колесу транспортного средства. На рис. 18-22 показаны методы моторизации транспортных средств.
©Booster Team 2017
29.
Рисунок 18. Моторизация велосипеда©Booster Team 2017
30.
Рисунок 19. Моторизация велосипеда©Booster Team 2017
31.
Рисунок 20. Моторизация велосипеда©Booster Team 2017
32.
Рисунок 21. Моторизация самоката©Booster Team 2017
33.
Рисунок 22. Моторизация инвалидной коляски©Booster Team 2017
34. 4. Приложения.
Ссылки на видео основных испытаний прототипа:https://www.youtube.com/watch?v=Z0WvrOGwmqQ
https://vimeo.com/160583616
https://www.youtube.com/watch?v=UHP9zM8G6f4
©Booster Team 2017
35.
Рекомендательные письма организаций:©Booster Team 2017
36.
©Booster Team 201737.
©Booster Team 201738.
Патенты:©Booster Team 2017
39. Разработчики:
Алексей Биногеров – автор идеи, главный конструктор.
Константин Умрилов – заказчик проекта.
Александр Брезицкий – координатор проекта.
Андрей Безлюдов – инженер-конструктор, системы.
Дмитрий Силин – инженер-конструктор, электрика.
Константин Платов – инженер-испытатель, техническая поддержка.
©Booster Team 2017