













 industry
industrySimilar presentations:










Принцип действия и устройство навигационных эхолотов и гидролокаторов
1. Современные автоматизированные системы управления движением судов
Лекция №11Тема: «Бортовые акустические измерители глубин, дистанций и
направлений. Часть 3: Принцип действия и устройство навигационных
эхолотов и гидролокаторов»
Учебные вопросы и распределение времени:
Вступление..............................................................................................5 мин.
1. Измерение дистанции……...............................................................35 мин.
2. Измерение направления………………………………...................35 мин.
Выводы и ответы на вопросы................................................................5 мин.
2. Учебная и воспитательная цель: «Формирование у студентов целостного представления о современных автоматизированных системах
управлениядвижением судов»
Учебная литература:
1. Алексишин В.Г., Козырь Л.А., Короткий Т.Р. Международные и
национальные стандарты безопасности мореплавания. Одесса: «Латстар», 2002.-257с.
2. Золотов В.В., Фрейдзон И.Р. Управляющие комплексы
сложных корабельных систем.-Л.: «Судостроение», 1986.-232с.
3. Вагущенко Л.Л. Интегрированные системы ходового мостика.
- Одесса: «Латстар», 2003.-170с.
4. Вагущенко Л.Л., Вагущенко А.Л., Заичко С.И. Бортовые
автоматизированные системы контроля мореходности. Одесса: «Фенікс», 2005.-272с.
5. Вагущенко Л.Л. Судовые навигационно-информационные
системы. - Одесса: «Латстар», 2004.-302с.
3.
Среди средств наблюдения, связи и управления в подводной среде особоеместо занимают гидроакустические станции (ГАС) активного действия, к
которым, в частности, относятся навигационные эхолоты и гидролокаторы.
Навигационный эхолот предназначен для измерения глубин под
килем судна-носителя, а гидролокатор для определения трех координат
подводного объекта, находящегося в стороне от судна-Носителя: Д дистанции,
истинного пеленга (курсового угла) и угла цели Q (угла в вертикальной
плоскости).
Гидролокатор кругового
обзора «MS1000»
Эхолоты серии Target
Гидролокатор бокового
обзора 4200-SP
4.
Принцип измерения дистанции до подводного объектаПринцип измерения дистанции до подводного объекта с помощью эхолота или
гидролокатора заключается в измерении промежутка времени между посылкой
зондирующего импульса в толщу воды и приходом отраженного от объекта
(препятствия) эхо-сигнала к приемнику.
Зная скорость распространения звука в воде, можно определить дистанцию до
подводного объекта по формуле
Д
с о t
2
где со— расчетное значение скорости звука в воде (1500 м/с).
Таким образом, задача об определении глубины под килем или дистанции до
подводного объекта сводится к измерению весьма малого промежутка времени
t.
Конструктивно она может быть решена различными методами с применением в
качестве индикаторных устройств электромеханических указателей глубин,
самописцев и цифровых электронных указателей глубин.
5.
Электромеханические указатели глубинЭлектромеханические указатели глубин предназначаются для визуального отсчета
глубин и управления посылками акустических импульсов. Они используются только в
эхолотах.
Указатель глубин с механической линейной разверткой времени состоит из
вращающейся планки 1 с неоновой лампочкой 2, трансформатора Т, кулачков З с
контактами S1 и S2, электродвигателя 5, посылочного реле 6, коробки скоростей 4 и
шкалы, разбитой в единицах глубины.
Эхолот с электромеханическим указателем
глубины работает следующим образом.
Электродвигатель 5 вращает с постоянной
частотой вращения планку 1 с неоновой
лампочкой 2 и кулачком З. В момент
прохождения неоновой лампочкой нулевого
деления шкалы кулачок З размыкает контакт S1,
при этом разрывается цепь питания обмотки
посылочного реле 6 и его контакты замыкаются
под действием пружины 7. Конденсатор С
разряжается через обмотку вибратора-излучателя
(ВИ). При этом образуется колебательный
контур,
в
котором
возникают
мощные
затухающие колебания, и электромеханический
преобразователь излучает в воду ультразвуковой
импульс большой интенсивности.
6.
Электромеханические указатели глубинЗондирующий импульс в основном
максимуме диаграммы направленности
распространяется ко дну, а в боковом — к
вибратору-приемнику
ВП.
Боковой
акустический импульс в вибратореприемнике преобразуется в слабый
электрический сигнал, который после
усиления поступает на первичную
обмотку трансформатора Т. Со вторичной
обмотки трансформатора напряжение
подается на неоновую лампочку 2.
Вспышка
лампочки
практически
совпадает с нулем шкалы.
Зондирующий импульс в пределах основного максимума диаграммы направленности
доходит до дна, отражается и принимается вибратором-приемником ВП. Слабая
э.д.с., возникающая в обмотке вибратора, после усиления заставит вспыхнуть
неоновую лампочку против деления шкалы, соответствующего измеряемой глубине.
При следующем обороте планки рассмотренный процесс повторится. Из-за быстрого
вращения планки с неоновой лампочкой нулевые вспышки и отметки глубин
сливаются, и по шкале можно непрерывно отсчитывать глубину под килем судна.
7.
Электромеханические указатели глубинПрименение неоновой лампочки вызвано
тем, что она практически безынерционна, т.
е. мгновенно зажигается при подаче
напряжения и мгновенно гаснет при
отсутствии его; это обеспечивает точный
отсчет глубин по шкале Частота вращения
неоновой лампочки должна быть строго
постоянной для данного диапазона глубин;
это
поддерживается
с
помощью
автоматического
регулятора
частоты
вращения электродвигателя.
При регистрации малых глубин необходимо «гасить» нулевую отметку. Это вызвано
тем, что накопительный конденсатор разряжается на нулевой отметке, а для фиксации
глубины под килем зарядится не успевает. Схема гашения нулевой отметки действует
от контактов S2, которые в момент, соответствующий посылке импульса, отключают
накопительный конденсатор от цепи разряда (на рис. не показано). После
прохождения неоновой лампочкой нулевой отметки шкалы схема разряда
восстанавливается и импульсы, отраженные даже с малых глубин, отмечаются
указателем эхолота.
8. Самописцы указателей глубин
В настоящее время наибольшее распространение получают самописцы с линейноймеханической разверткой в виде бесконечной ленты с закрепленными на ней пером и
кулачком. Электропривод заставляет перо двигаться с постоянной скоростью по
электротермической бумаге. В момент прохождения пером нулевого деления шкалы
посылочные контакты срабатывают и подключают импульсный генератор к
обмотке вибратора-излучателя, который посылает в воду зондирующий импульс.
К моменту возвращения эхо-сигнала от
подводного объекта перо перемещается вдоль
шкалы на некоторое расстояние, прямо
пропорциональное
глубине
(дистанции).
Усиленный электрический сигнал прожигает
бумагу, регистрируя отметку глубины.
Шкалы индикаторов рассчитывают на
определенные глубины и дистанции. Масштаб
шкалы определяется пределами значений
измеряемых величин, также шириной бумажной
ленты самописца.
9.
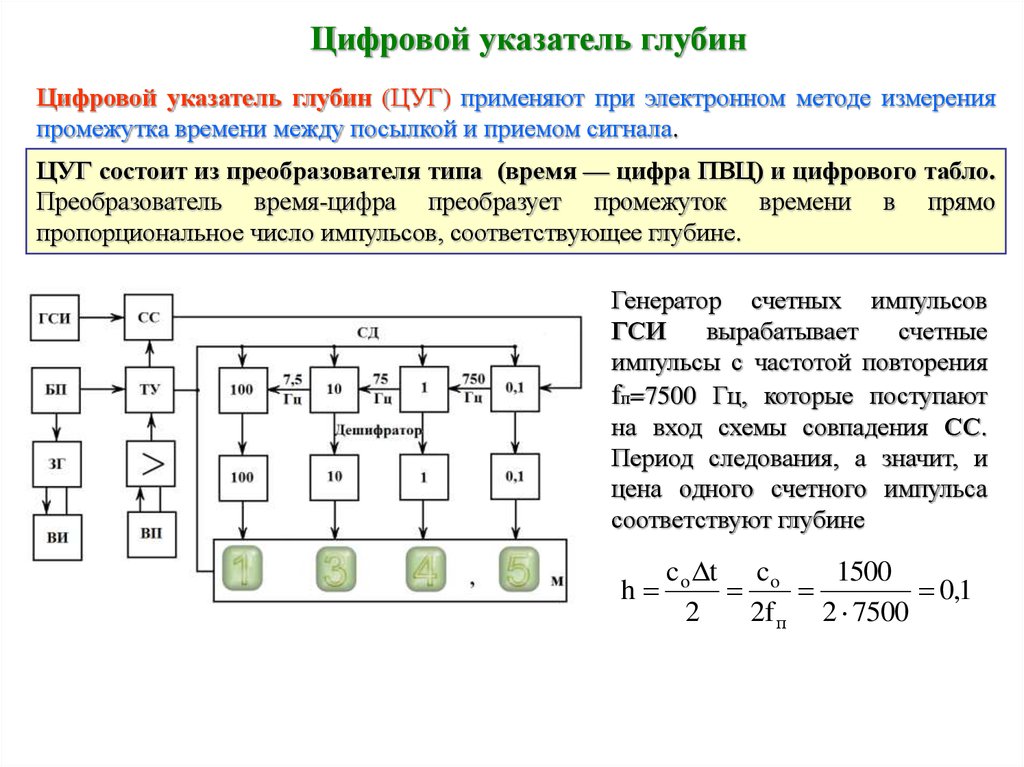
Цифровой указатель глубинЦифровой указатель глубин (ЦУГ) применяют при электронном методе измерения
промежутка времени между посылкой и приемом сигнала.
ЦУГ состоит из преобразователя типа (время — цифра ПВЦ) и цифрового табло.
Преобразователь время-цифра преобразует промежуток времени в прямо
пропорциональное число импульсов, соответствующее глубине.
Генератор счетных импульсов
ГСИ
вырабатывает
счетные
импульсы с частотой повторения
fп=7500 Гц, которые поступают
на вход схемы совпадения СС.
Период следования, а значит, и
цена одного счетного импульса
соответствуют глубине
c o t c o
1500
h
0,1
2
2f п 2 7500
10.
Цифровой указатель глубинВ момент излучения блок посылок
БП вырабатывает импульс посылки,
который поступает к задающему
генератору ЗГ и триггеру управления
ТУ. Последний сбрасывает счетные
декады СД с цифрового табло в
нулевое положение. Одновременно
триггер управления выдает на схему
совпадения разрешающий сигнал, и с
этого момента счетные импульсы
начинают поступать на счетную
декаду десятых долей (0,1).
Задающий генератор вырабатывает мощный импульс, а вибратор-излучатель
осуществляет посылку. Счетные декады подсчитывают счетные импульсы до тех пор,
пока отраженный от дна эхо-сигнал не попадет на вибратор-приемник и после усиления
не поступит в триггер управления. Последний снимает разрешающий сигнал со схемы
совпадения, и счет импульсов прекращается. Одновременно импульс триггера
управления включает цифровое табло, и подсчитанный счетными декадами результат
подается через дешифратор на цифровое табло ЦТ.
11.
Измерение направленияНаиболее простой и распространенной гидроакустической станцией для
горизонтального обзора водного пространства является гидролокатор с
электромеханическим
сканированием
(перемещением)
однолепестковой
акустической антенны.
Для измерения пеленга на подводный
объект
используется
свойство
направленности приемной антенны. Для
этого
антенну
устанавливают
в
поворотно-выдвижном
устройстве,
обеспечивающем разворот антенны в
горизонтальной плоскости на угол до
360 и в вертикальной плоскости на угол
до 90° и, следовательно, зондирование
всей толщи воды под килем судна.
Обзор водного пространства может вестись в
автоматическом режиме (только по горизонту) или
вручную, плавно или дискретно. В автоматическом
режиме сканирование ведется в установленном
оператором секторе.
12.
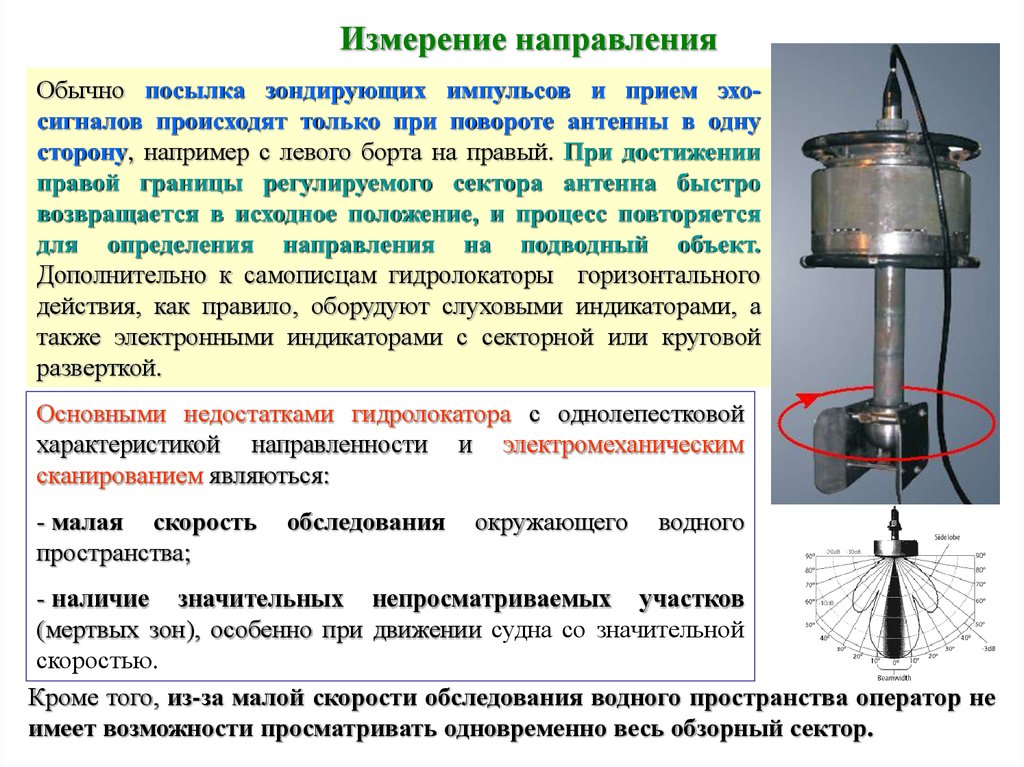
Измерение направленияОбычно посылка зондирующих импульсов и прием эхосигналов происходят только при повороте антенны в одну
сторону, например с левого борта на правый. При достижении
правой границы регулируемого сектора антенна быстро
возвращается в исходное положение, и процесс повторяется
для определения направления на подводный объект.
Дополнительно к самописцам гидролокаторы горизонтального
действия, как правило, оборудуют слуховыми индикаторами, а
также электронными индикаторами с секторной или круговой
разверткой.
Основными недостатками гидролокатора с однолепестковой
характеристикой направленности и электромеханическим
сканированием являються:
- малая скорость
пространства;
обследования
окружающего
водного
- наличие значительных непросматриваемых участков
(мертвых зон), особенно при движении судна со значительной
скоростью.
Кроме того, из-за малой скорости обследования водного пространства оператор не
имеет возможности просматривать одновременно весь обзорный сектор.
13.
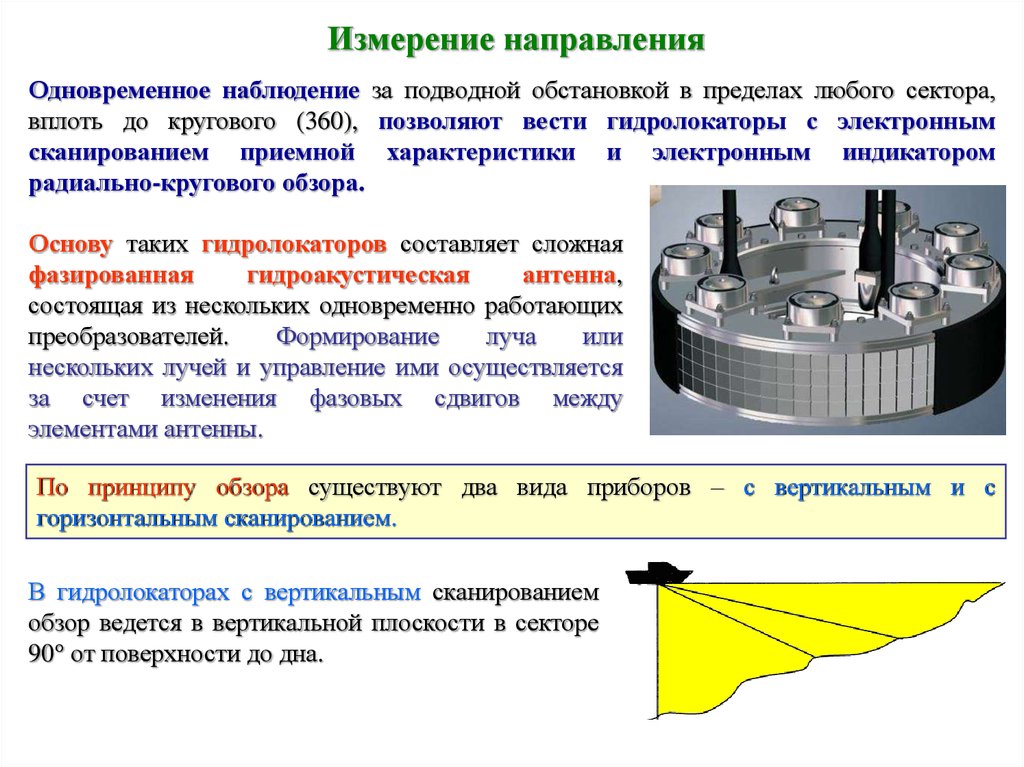
Измерение направленияОдновременное наблюдение за подводной обстановкой в пределах любого сектора,
вплоть до кругового (360), позволяют вести гидролокаторы с электронным
сканированием приемной характеристики и электронным индикатором
радиально-кругового обзора.
Основу таких гидролокаторов составляет сложная
фазированная
гидроакустическая
антенна,
состоящая из нескольких одновременно работающих
преобразователей.
Формирование
луча
или
нескольких лучей и управление ими осуществляется
за счет изменения фазовых сдвигов между
элементами антенны.
По принципу обзора существуют два вида приборов – с вертикальным и с
горизонтальным сканированием.
В гидролокаторах с вертикальным сканированием
обзор ведется в вертикальной плоскости в секторе
90° от поверхности до дна.
14.
Измерение направленияПри вертикальном сканировании в излучателях
фазированная
решетка
ориентирована
для
сканирования 12-градусным лучом от поверхности
воды прямо перед судном до дна под судном. В этом
режиме на экране гидролокатора показано «живое»
изображение рельефа дна, подводных объектов,
крупных препятствий и даже стай рыбы, находящихся
прямо
перед
судном.
Экран
вертикального
сканирования является наиболее доступным и
интуитивно понятным.
Дальность до препятствий или мелей определяется по шкале на экране. Шкала
дальности и глубин может устанавливаться автоматически или вручную.
15.
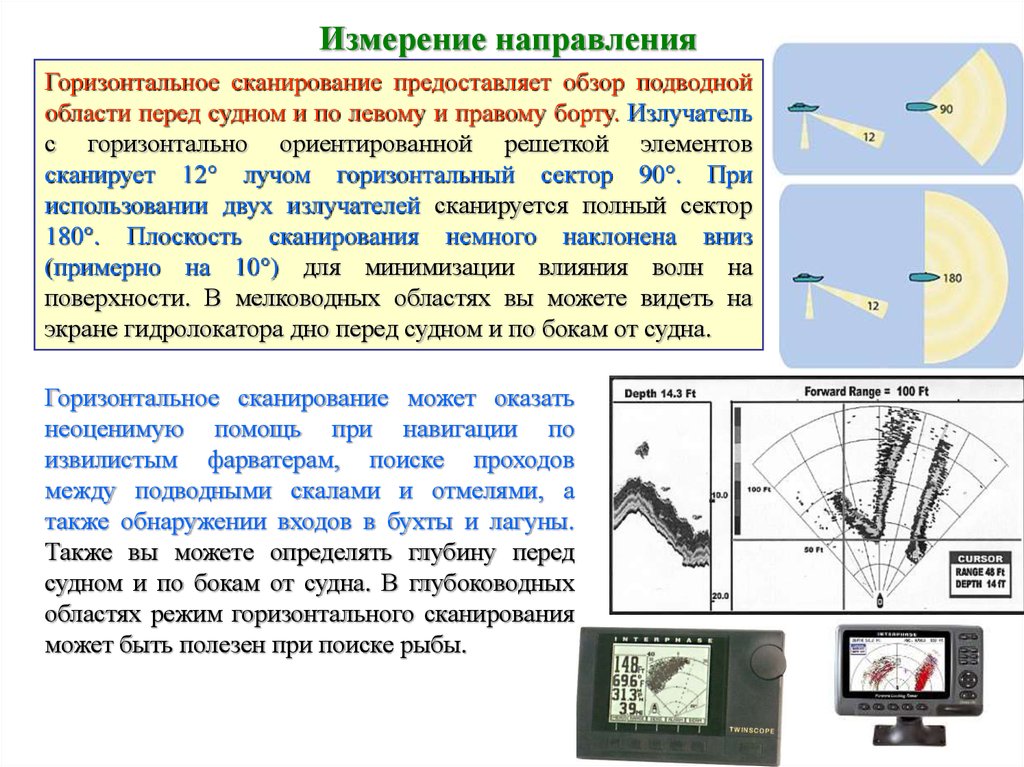
Измерение направленияГоризонтальное сканирование предоставляет обзор подводной
области перед судном и по левому и правому борту. Излучатель
с горизонтально ориентированной решеткой элементов
сканирует 12° лучом горизонтальный сектор 90°. При
использовании двух излучателей сканируется полный сектор
180°. Плоскость сканирования немного наклонена вниз
(примерно на 10°) для минимизации влияния волн на
поверхности. В мелководных областях вы можете видеть на
экране гидролокатора дно перед судном и по бокам от судна.
Горизонтальное сканирование может оказать
неоценимую помощь при навигации по
извилистым фарватерам, поиске проходов
между подводными скалами и отмелями, а
также обнаружении входов в бухты и лагуны.
Также вы можете определять глубину перед
судном и по бокам от судна. В глубоководных
областях режим горизонтального сканирования
может быть полезен при поиске рыбы.
16.
Измерение направленияПо принципу использования фазированной антенной решетки существуют два
метода обзора подводного пространства – последовательный и параллельный.
В гидролокаторах с последовательным обзором
исследование
осуществляется
путем
последовательного, шаг за шагом, перемещением
сформированного
преобразователем
луча
в
вертикальной или горизонтальной плоскости. Луч
движется дискретно, останавливаясь на каждой
позиции на время, необходимое для получения
достаточной для отображения информации.
Полученное на каждом положении луча изображение сохраняется на время обзора
всего сектора и обновляется при последующем сканировании. Поэтому процесс
просмотра всего сектора обзора занимает достаточно большое время – 10–16 сек.
Если для тихоходных судов этого вполне достаточно, то для высокоскоростных судов,
проходящих за это время десятки и сотни метров, такие задержки неприемлемы.
Другим недостатком таких эхолотов, является недостаточный объем информации,
определяемый ограниченным время нахождения луча на каждой отдельно взятой
позиции. Поэтому эхолоты с последовательным обзором непригодны для
распознавания подводных объектов и используются, в основном, в целях навигации.
17.
Измерение направленияГидролокаторы с параллельным обзором
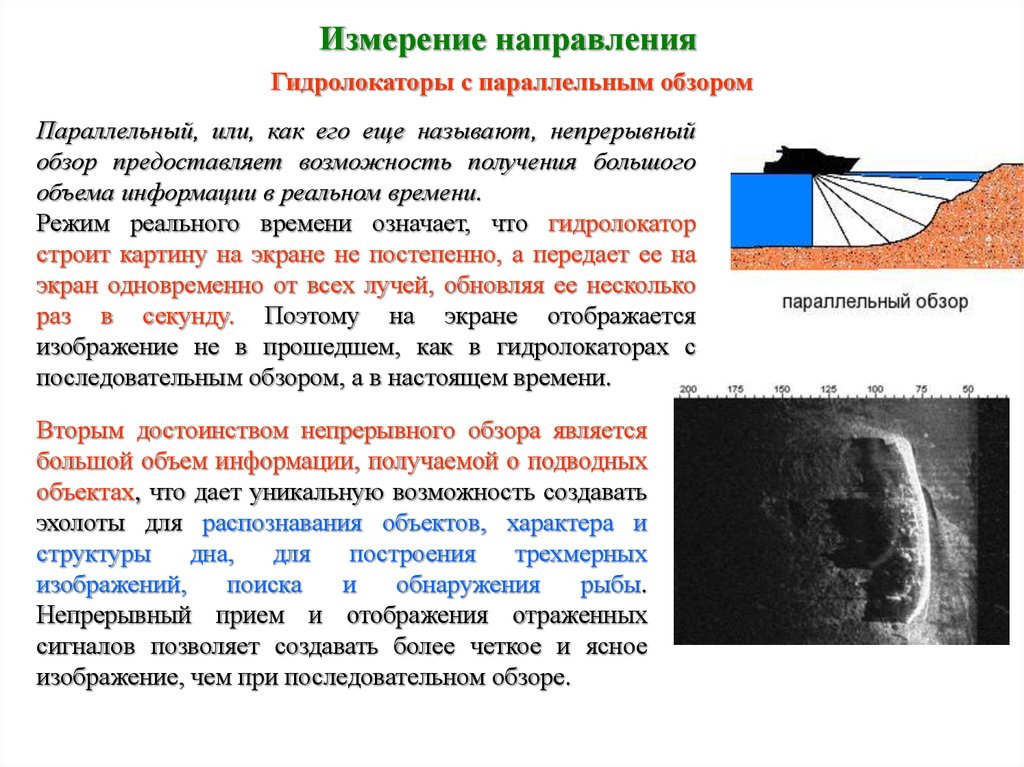
Параллельный, или, как его еще называют, непрерывный
обзор предоставляет возможность получения большого
объема информации в реальном времени.
Режим реального времени означает, что гидролокатор
строит картину на экране не постепенно, а передает ее на
экран одновременно от всех лучей, обновляя ее несколько
раз в секунду. Поэтому на экране отображается
изображение не в прошедшем, как в гидролокаторах с
последовательным обзором, а в настоящем времени.
Вторым достоинством непрерывного обзора является
большой объем информации, получаемой о подводных
объектах, что дает уникальную возможность создавать
эхолоты для распознавания объектов, характера и
структуры
дна,
для
построения трехмерных
изображений,
поиска
и
обнаружения
рыбы.
Непрерывный прием и отображения отраженных
сигналов позволяет создавать более четкое и ясное
изображение, чем при последовательном обзоре.
18.
Измерение направленияДля обработки такого большого объема информации в гидролокаторах с
параллельным обзором используется мощный микропроцессор, способный
выполнять до 100000 операций при каждом обновлении изображения на экране.
Наличие такого мощного процессора в совокупности с наличием большого объема
получаемой информации позволяет получать достаточно надежное распознавание
подводных объектов.
19.
Измерение направленияЕсли смотреть на акустическое изображение, то судно двигалось снизу вверх. Линия
движения судна совпадает с вертикальной шкалой в центре изображения, которая
показывает расстояние, пройденное судном, в условных единицах длины.
Акустическое изображение разбито на две части, слева от вертикальной шкалы
показано акустическое изображение дна с левого борта, а справа – с правого борта.
Сверху, над акустическими изображениями дна левого и правого бортов, показаны
две шкалы – эти шкалы показывают наклонную дальность, соответственно, для
левого и правого изображений, в метрах. Полоса обзора для правого изображения
составляет более 90 метров, а для левого – более 110 метров. Темная полоса слева и
справа от вертикальной шкалы – это слой воды между приемо-передающей антенной
гидролокатора и дном и по границе этой темной полосы можно судить о глубине под
судном.