



















 mechanics
mechanics electronics
electronicsSimilar presentations:










Электрические машины и микромашины устройств автоматики
1.
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ УКРАИНЫДОНЕЦКИЙ НАЦИОНАЛЬНЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
КАФЕДРА «ЭЛЕКТРОМЕХАНИКА И ТОЭ»
КОНСПЕКТ ЛЕКЦИЙ
по дисциплине
«ЭЛЕКТРОМАГНИТНАЯ ТЕХНИКА».
Часть 2. «Электрические машины и микромашины
устройств автоматики».
Для студентов специальности 090803 «Электронные системы».
Составители: доц. Васильев Л.А.
доц. Мнускин Ю.В.
Донецк 2011
2.
ЛИТЕРАТУРА1.
2.
3.
4.
5.
6.
7.
8.
Подлипенский В.С., Петренко В.П. Электромагнитные и
электромашинные устройства автоматики. –Киев. –1987.
Миловзоров В.П. Электромагнитные устройства автоматики. –
Москва. –1983.
Волков Н.И., Миловзоров В.П. Электромашинные устройства
автоматики. –Москва. –1986.
Брускин Д.Э., Зорохович А.Е., Хвостов В.С. Электрические машины и
микромашины. –Москва. –1990.
Кацман М.М. Электрические машины и электропривод
автоматических устройств. –Москва. –1987.
Электронный конспект лекций по дисциплине «Электромагнитная
техника». Составители: Васильев Л.А., Мнускин Ю.В.
Методические указания №294 по дисциплине «Электромагнитная
техника». Раздел «Электромагнитные устройства». –ДонНТУ.
Методические указания №196 по дисциплине «Электромагнитная
техника». Раздел «Электрические машины и микромашины». –
ДонНТУ.
3.
Электромагнитная техникаРАЗДЕЛ 2
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ
УСТРОЙСТВ АВТОМАТИКИ.
Лекция 8
ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА ПОСТОЯННОГО ТОКА.
8.1 Общие сведения, конструкция, принцип действия.
8.2 Реакция якоря, коммутация.
8.3 Основные уравнения.
8.4 КПД.
4. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА ПОСТОЯННОГО ТОКА
8.1 Общие сведения, конструкция, принципдействия.
Электрическая машина постоянного тока
(МПТ) – устройство для преобразо-вания
электрической энергии постоянного
Генератор
постоянного
тока (ГПТ) – для
тока и механической
энергии
преобразования
механической энергии в
посредством электромагнитной
электрическую
энергию постоянного
индукции.
тока:
► силовые;
Двигатель
постоянного тока (ДПТ) – для
► тахогенераторы.
преобразования электрической энергии
постоянного тока в механическую
энергию:
► силовые (независимого, параллельного,
последовательного и смешанного
возбуждения);
► микродвигатели (обычной конструкции,
магнитоэлектрические,
с полым якорем, с
Свойства
МПТ:
печатной обмоткой якоря);
хорошие регулировочные
исполнительные.
характеристики;
► хорошие пусковые характеристики;
► возможность получения как «мягких», так
и «жестких» характеристик.
5.
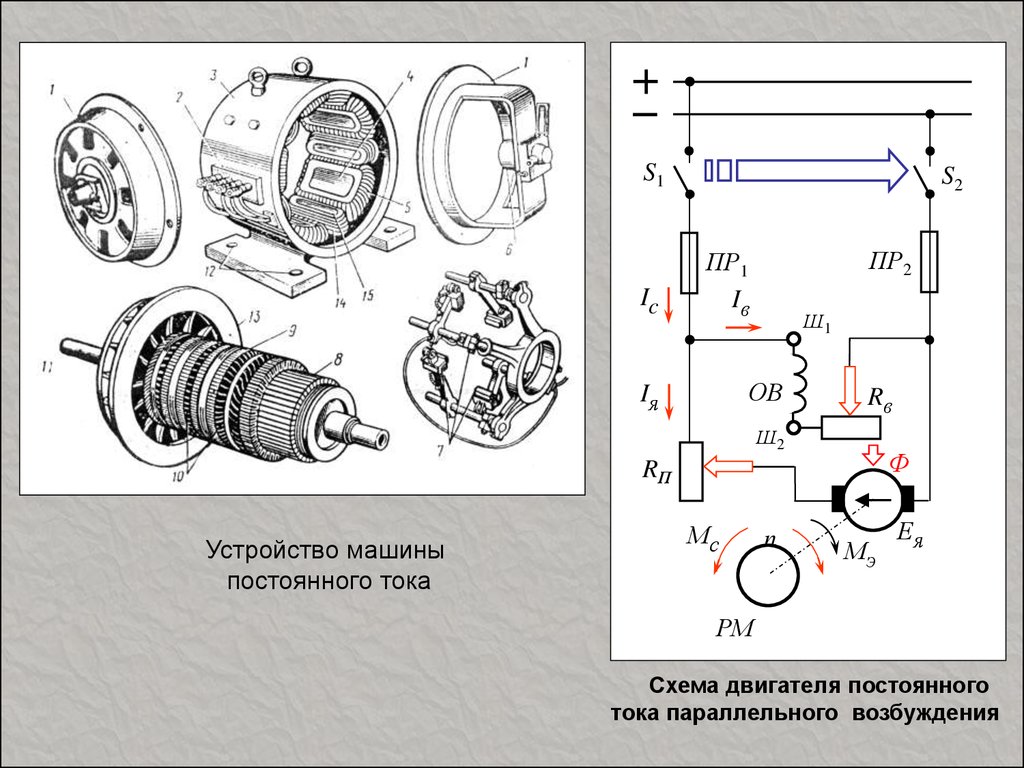
S1Ic
S2
ПР2
ПР1
Iв
Ш1
ОВ
Iя
Rв
Ш2
Ф
RП
Устройство машины
постоянного тока
Мс
n
Мэ
Ея
РМ
Схема двигателя постоянного
тока параллельного возбуждения
6. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА ПОСТОЯННОГО ТОКА
Основные элементыконструкции:
1. коллектор;
2. щеточный узел;
3. сердечник якоря;
4. главные полюса
(пара);
5. обмотка
возбуждения (ОВ);
6. сердечник статора;
7. передний щит
корпуса;
8. вентилятор;
9. обмотка якоря (ОЯ);
10. вал;
МПТ по способу возбуждения:
11. станина;
► электромагнитные (есть обмотка
12. задний
щит корпуса.
возбуждения);
магнитоэлектрические
(с возбуждением
Коллектор
– цилиндрический
узел,
от
постоянных
магнитов).
состоящий из медных пластин (ламелей),
соединенных с секциями обмотки якоря. В
генераторном режиме являет-ся
«механическим» выпрямителем между
якорной обмоткой, в которой протекают
7. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА ПОСТОЯННОГО ТОКА
Принцип действия ГПТ:► при протекании в обмотке возбуждения
постоянного тока в воздушном зазоре
между главными полюсами создается
поток возбуждения, который пересекает
сердечник и обмотку якоря;
► при вращении якоря в проводниках его
обмотки наводится ЭДС, направление
которой зависит только от того, под
каким главным полюсом находится данный
проводник, направление ЭДС
определяется поФправилу
правой ладони;
в
► при вращении якоря ЭДС в проводниках
меняет знак, поэтому для
преобразования ее в постоянную ЭДС для
питания нагрузки применяется
коллектор и
N щетки, которые
устанавливаются на геометрической
нейтрали.
геометрическая
нейтраль
N
S
8. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА ПОСТОЯННОГО ТОКА
В каждой секции якорной обмоткинаводится синусоидальная ЭДС, которая
достигается специальной формой
полюсных наконечников главных полюсов
(к=2).
Если обмотка якоря многосекционная
(к=4,6,8…), то ЭДС обмоток «перекрываются», и
Принцип
действия
ДПТ – при
результирующая
ЭДС на выходе
щеточнопитании
якоря
от
коллекторного узла
имеет
все меньшие
источника постоянного
пульсации.
тока через секции
якорной обмотки
протекает ток, который
взаимодействует с
постоянным потоком
возбуждения, при этом
Щеточно-коллекторный
возникает сила Лоренца,
узел
осуществляет
под
действием
которой
переключение
активная пара секций
якорной обмотки, чтобы
проводников
к источнику питания
перемещается
в
была
подключена
противоположныхпара
проводников,
направлениях.
находящихся в данный
момент времени под
главными полюсами.
9. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА ПОСТОЯННОГО ТОКА
8.2 Реакция якоря, коммутация.Реакция якоря – это влияние магнитного
поля, создаваемого МДС якорной обмотки,
на общее магнитное поле МПТ.
В линейном режиме вместо влияния МДС
можно рассмотреть влияние магнитного
потока якоря Фа.
В МПТ с нагрузкой поток якоря направлен
по поперечной оси машины (геометрической нейтрали), поэтому
направление результирующего потока
смещается к противоположным краям
главных полюсов.
Для уменьшения влияния поля реакции
якоря щетки смещают с геометричес-кой
10. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА ПОСТОЯННОГО ТОКА
8.3 Основные уравнения.Мгновенная ЭДС проводника обмотки якоря:
e Blv ,
где
B – индукция магнитного поля;
l – длина проводника;
v – скорость перемещения проводника.
Суммарная ЭДС активных проводников:
N / 2a
1
N 2 pn
pN
Blv
n ,
2a 60
60a
где
N – полное число активных
проводников обмотки;
а – число параллельных ветвей
обмотки;
N/2a – число проводников, входящих в
11. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА ПОСТОЯННОГО ТОКА
ЭДС обмотки якоря:Ea
N / 2a
e CE n ;
1
pN
CE
.
60a
Электромагнитная мощность двигателя:
Pэм Еа I a ,
где
Ia – ток якоря.
Уравнение электромагнитного момента
МПТ:
M
Pэм
а
С Е nI a
a
30
C E I a СМ ФI a ,
CM
pN 30C E
.
2 a
12. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА ПОСТОЯННОГО ТОКА
Уравнение электрического равновесияДПТ:
U Ea I a Rac ,
Ток якоря ДПТ:
(U Ea ) .
Ea U
Ia
.
Rac
Уравнение электрического равновесия
ГПТ:
U Ea I a Rac ,
Ток якоря ГПТ:
(U Ea ) .
U Ea
Ia
.
Rac
13. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА ПОСТОЯННОГО ТОКА
8.4 КПД.Энергетическая диаграмма МПТ:
P1 UI a UI в
Pa I a2 Rac
Pв UI в
14. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА ПОСТОЯННОГО ТОКА
Pэм P1 Pa Pв Ea I aP0 Pст Pм ех
Pст Pвихр Pгист
P Pa Pв Pcт Pм ех Рдоб
P2 P1 P
P
1
P1
P1
P1
P2 P1 P
ном 0 ,15...0 ,4
ном 0 ,5...0 ,8
15.
Электромагнитная техникаЛекция 9
ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА.
9.1 Способы возбуждения ДПТ.
9.2 Пуск и регулирование ДПТ.
9.3 Якорное регулирование ДПТ.
9.4 Полюсное регулирование ДПТ.
9.5 Импульсное регулирование ДПТ.
16. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА.
9.1 Способы возбуждения ДПТ.Применяются для получения определенных
выходных характеристик ДПТ.
ДПТ с независимым возбуждением
(обмотка возбуждения электрически не
связана с обмоткой
якоря):
Uв U
я.
ДПТ с параллельным возбуждением
(обмотка возбуждения включена
параллельно обмотке якоря):
Uв U я ;
const.
17. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА.
М,nмоментная х-ка
М=f(I a)
Моментная характерис
M CM I a .
скоростная х-ка
n=f(I )a
Скоростная характери
U I a Rac
E
n
.
CE
CE
Ia
Механическая характе
n
U I a Rac
MRac
U
.
2
CE
C E C E CM
18.
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА.
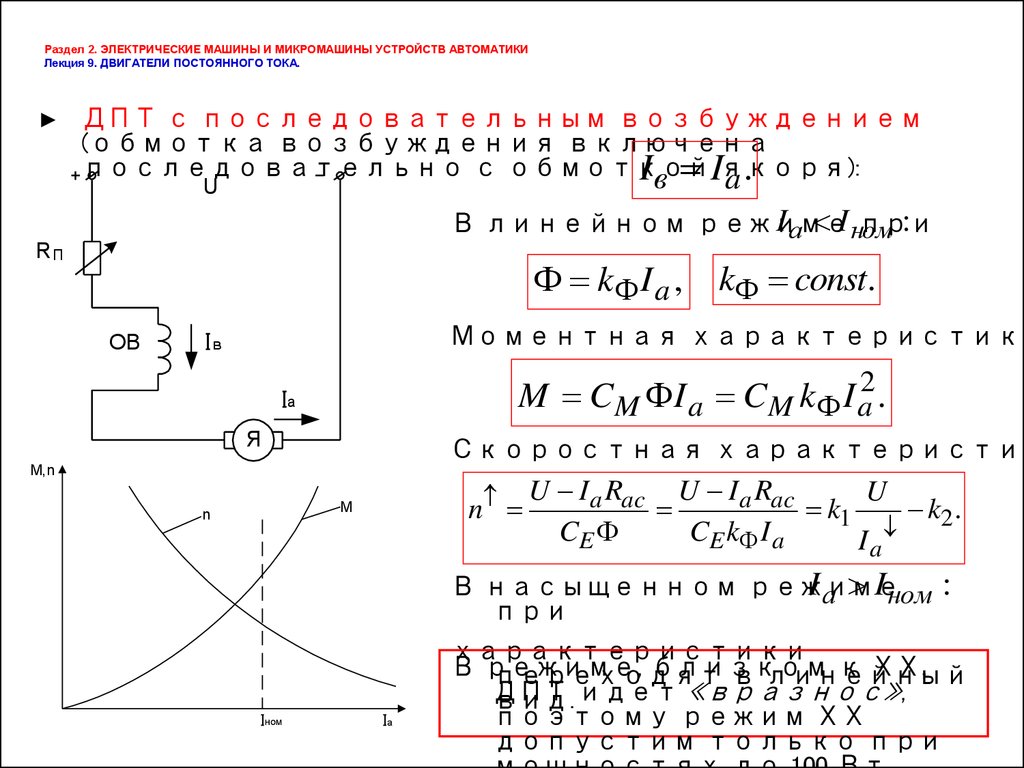
ДПТ с последовательным возбуждением
(обмотка возбуждения включена
последовательно с обмоткой
I в Iякоря):
a.
U
I а I ном
:
В линейном режиме
при
RП
k I a , k const.
ОВ
Моментная характеристика
Iв
M CM I a CM k I a2 .
Iа
Я
Скоростная характеристик
М,n
U I a Rac U I a Rac
U
n
k1
k2 .
CE
C E k I a
Ia
M
n
I а I ном
В насыщенном режиме
при
Iном
Iа
:
характеристики
В режиме,
близком
к ХХ,
переходят
в линейный
ДПТ
вид. идет «вразнос»,
поэтому режим ХХ
допустим только при
19.
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА.
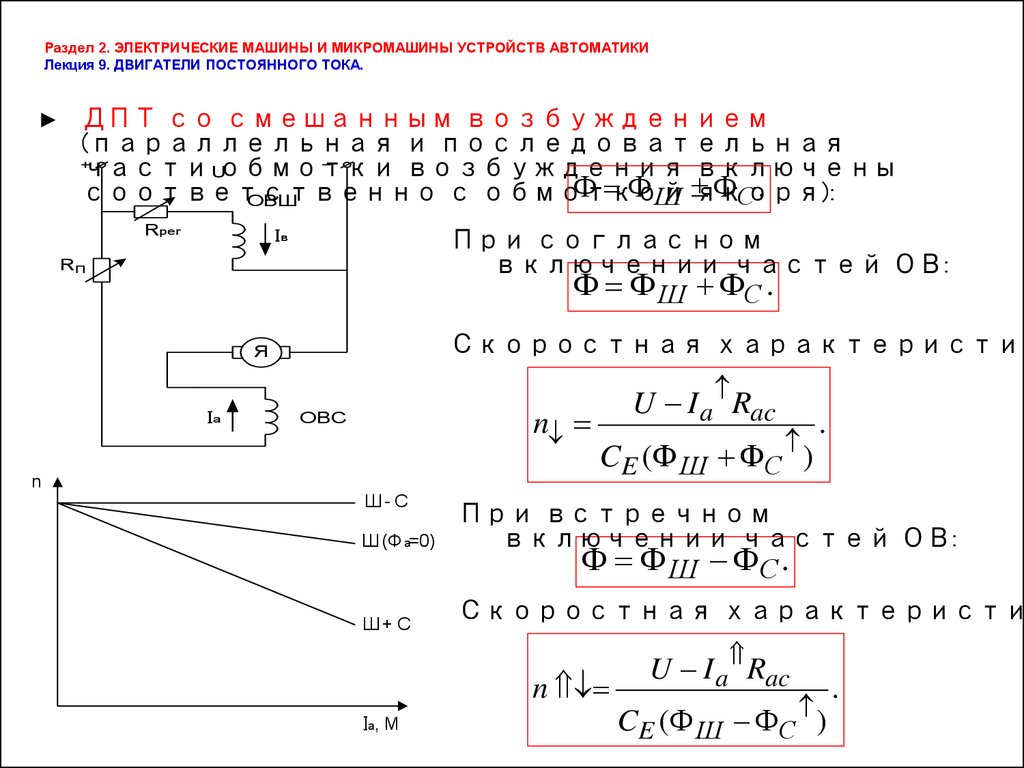
ДПТ со смешанным возбуждением
(параллельная и последовательная
части Uобмотки возбуждения включены
Ш якоря):
С .
соответственно
с обмоткой
ОВШ
Rрег
При согласном
включении частей ОВ:
Ш С .
Iв
RП
Скоростная характеристик
Я
Iа
n
n
ОВС
Ш- С
Ш (Ф a=0)
Ш+ С
U I a Rac
CE ( Ш С )
.
При встречном
включении частей ОВ:
Ш С .
Скоростная характеристи
n
Ia , M
U I a Rac
C E ( Ш С )
.
20.
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА.
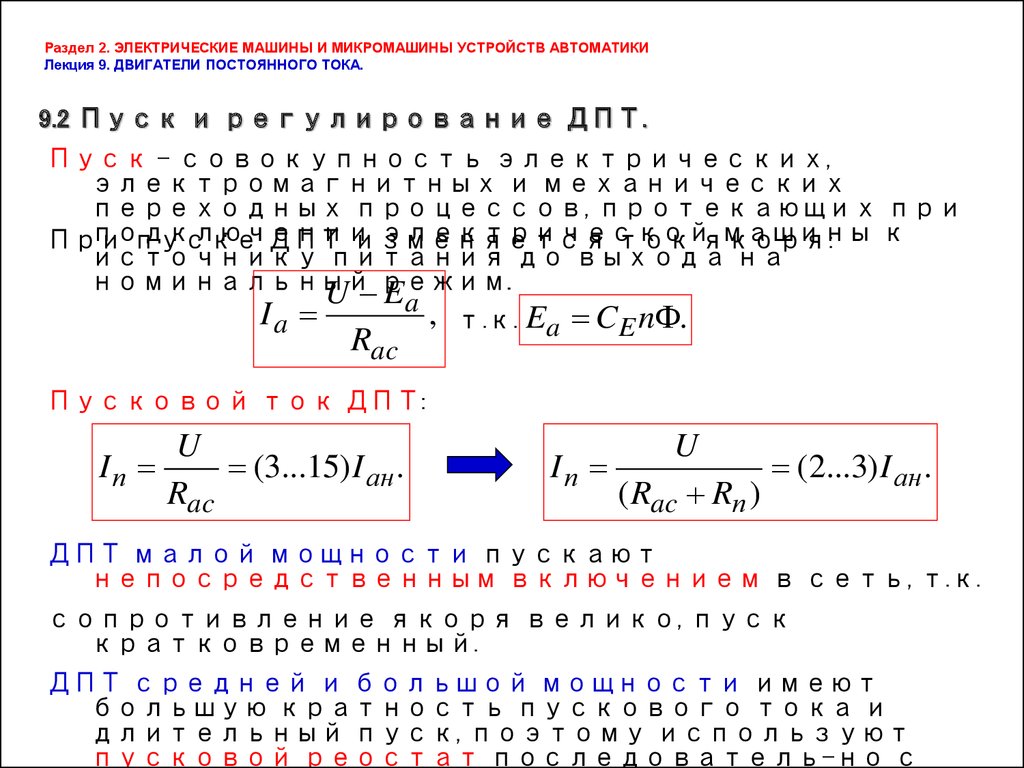
9.2 Пуск и регулирование ДПТ.
Пуск – совокупность электрических,
электромагнитных и механических
переходных процессов, протекающих при
подключении
электрической
машины к
При
пуске ДПТ изменяется
ток якоря:
источнику питания до выхода на
номинальный
U режим.
Ea
Ia
, т.к. Ea CE n .
Rac
Пусковой ток ДПТ:
Iп
U
(3...15) I ан .
Rac
Iп
U
(2...3) I ан .
( Rac Rп )
ДПТ малой мощности пускают
непосредственным включением в сеть, т.к.
сопротивление якоря велико, пуск
кратковременный.
ДПТ средней и большой мощности имеют
большую кратность пускового тока и
длительный пуск, поэтому используют
пусковой реостат последователь-но с
21.
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА.
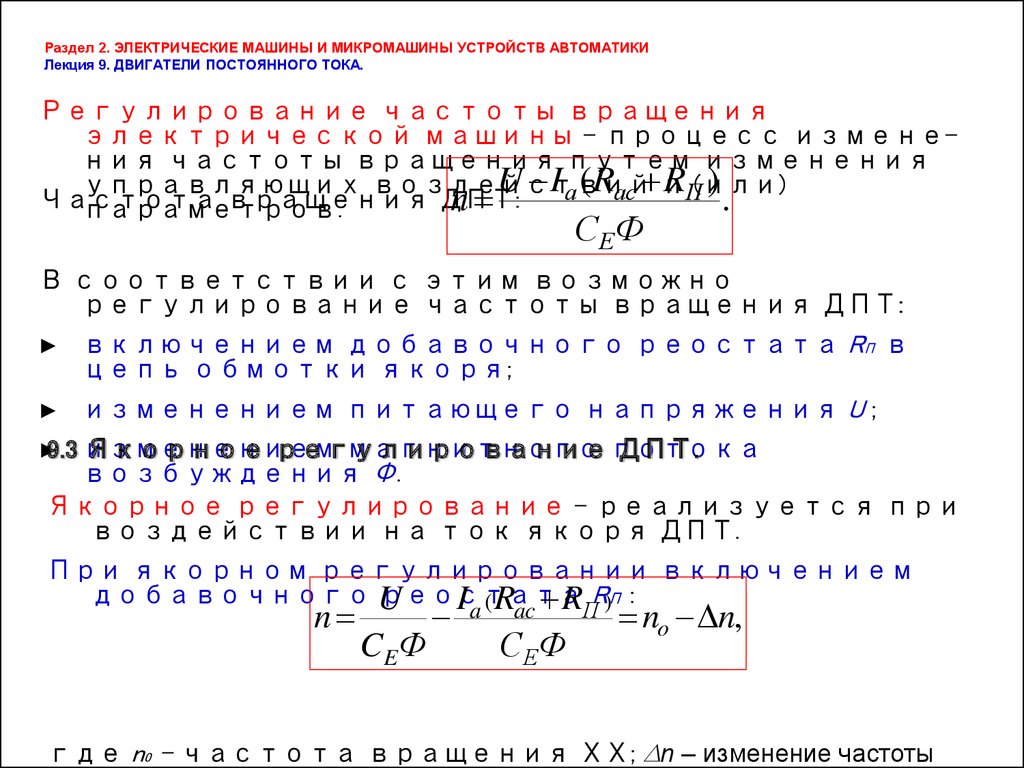
Регулирование частоты вращения
электрической машины – процесс изменения частоты вращения путем изменения
U I а (Rас и
RП(или)
)
управляющих воздействий
Частота
вращения
ДПТ:
n
.
параметров.
С ЕФ
В соответствии с этим возможно
регулирование частоты вращения ДПТ:
включением добавочного реостата RП в
цепь обмотки якоря;
изменением питающего напряжения U ;
магнитного потока
9.3 изменением
Якорное регулирование
ДПТ.
возбуждения Ф.
Якорное регулирование – реализуется при
воздействии на ток якоря ДПТ.
При якорном регулировании включением
добавочного U
реостата
I ( R R R)П :
n
C EФ
a
ac
С ЕФ
П
no n,
где n0 – частота вращения ХХ; ∆n – изменение частоты
22.
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА.
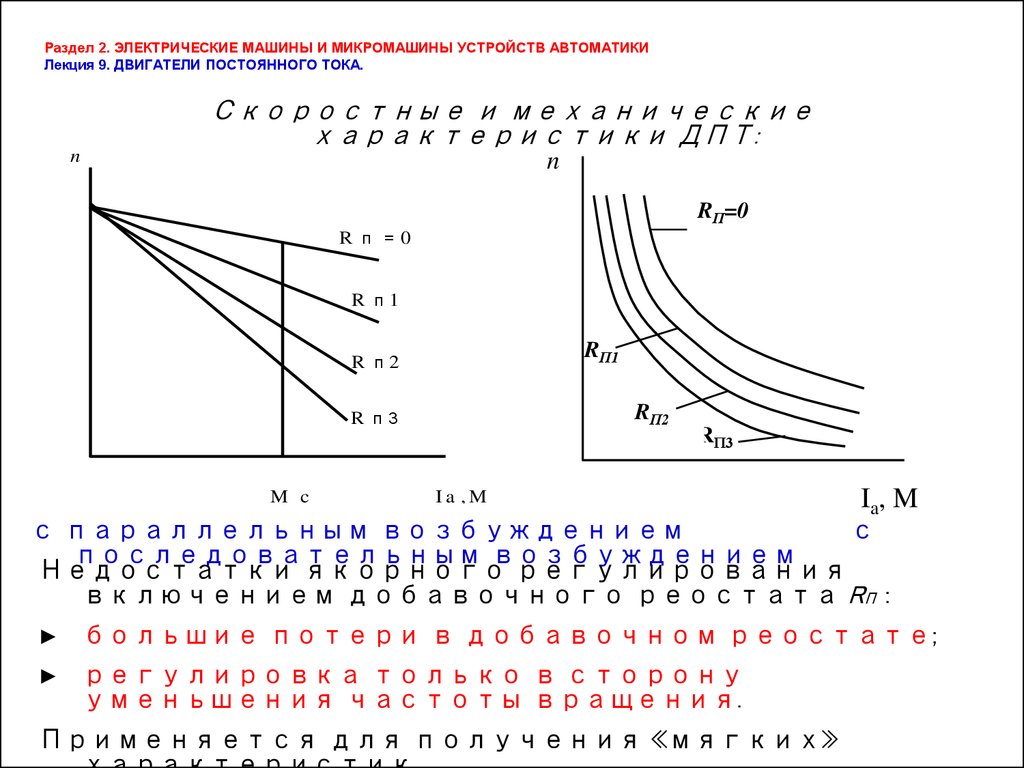
Скоростные и механические
характеристики ДПТ:
n
n
RП=0
R п =0
R п1
RП1
R п2
RП2
R п3
M c
RП3
Ia ,M
Ia, M
с параллельным возбуждением
с
последовательным возбуждением
Недостатки якорного регулирования
включением добавочного реостата RП :
большие потери в добавочном реостате;
регулировка только в сторону
уменьшения частоты вращения.
Применяется для получения «мягких»
23.
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА.
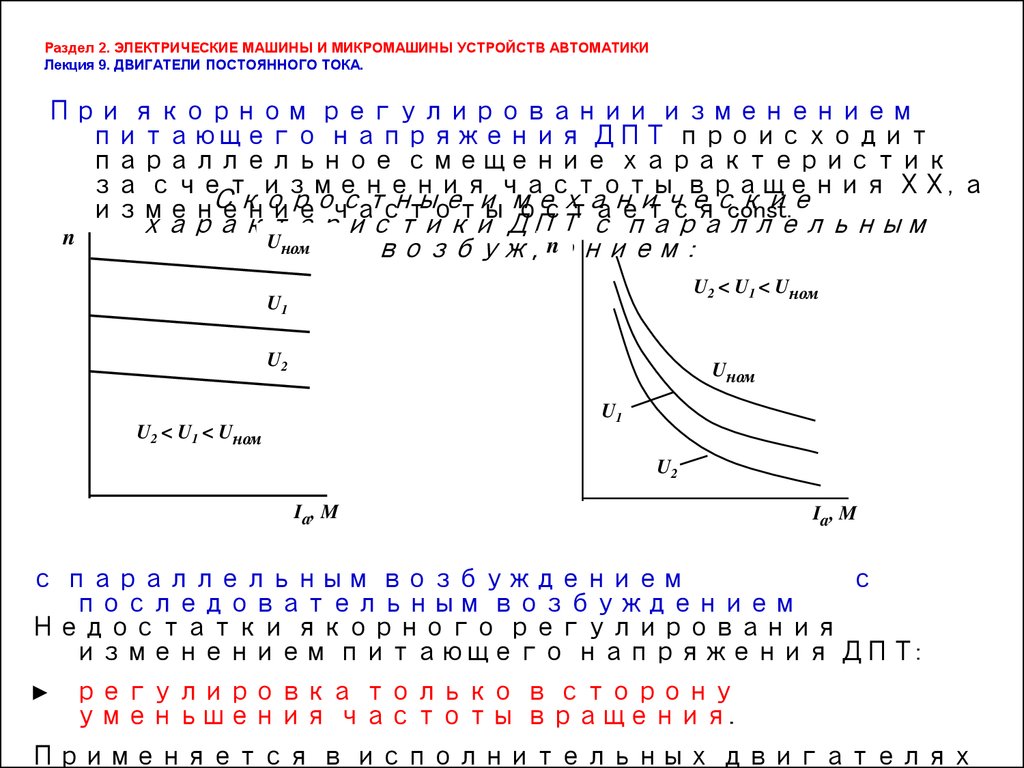
При якорном регулировании изменением
питающего напряжения ДПТ происходит
параллельное смещение характеристик
за счет изменения частоты вращения ХХ, а
Скоростные
и механические
изменение
частоты
остается const.
n
характеристики ДПТ с параллельным
Uном
n
возбуждением
:
U2 < U1 < Uном
U1
U2
Uном
U1
U2 < U1 < Uном
U2
Ia, M
Ia, M
с параллельным возбуждением
с
последовательным возбуждением
Недостатки якорного регулирования
изменением питающего напряжения ДПТ:
регулировка только в сторону
уменьшения частоты вращения.
Применяется в исполнительных двигателях
24.
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА.
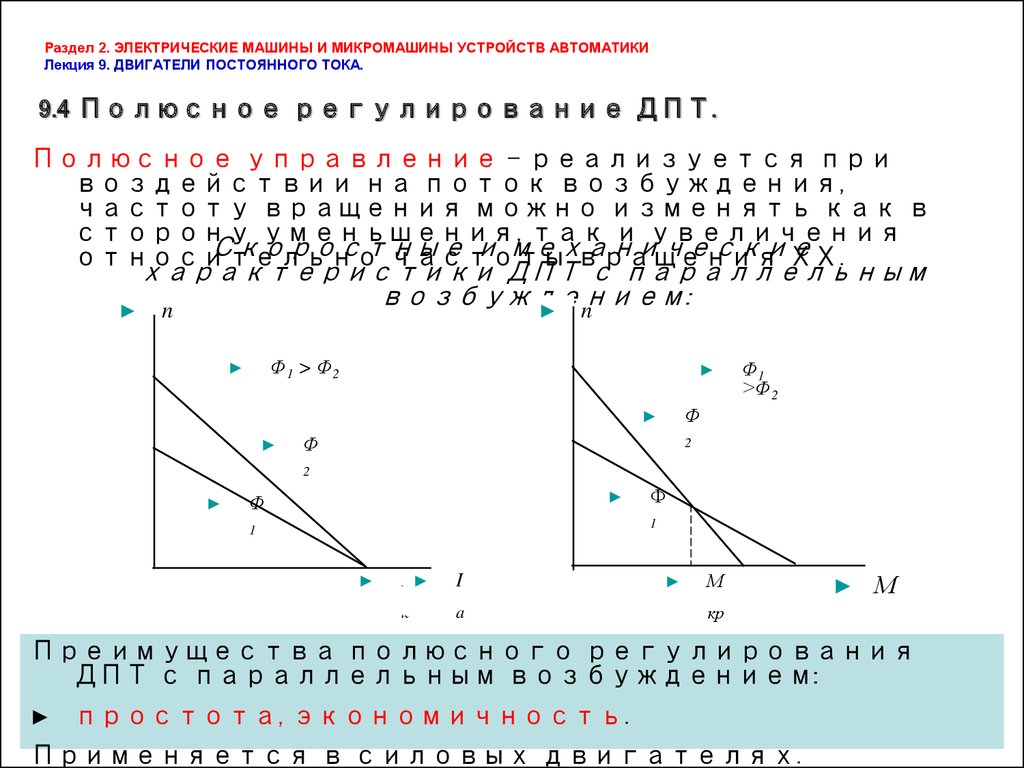
9.4 Полюсное регулирование ДПТ.
Полюсное управление – реализуется при
воздействии на поток возбуждения,
частоту вращения можно изменять как в
сторону уменьшения, так и увеличения
Скоростные
и механические
относительно
частоты
вращения ХХ.
характеристики ДПТ с параллельным
возбуждением:
► n
► n
Ф1 > Ф2
Ф
Ф1
>Ф2
Ф
2
2
Ф
Ф
1
1
I
I
k
a
М
М
кр
Преимущества полюсного регулирования
ДПТ с параллельным возбуждением:
простота, экономичность.
Применяется в силовых двигателях.
25.
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА.
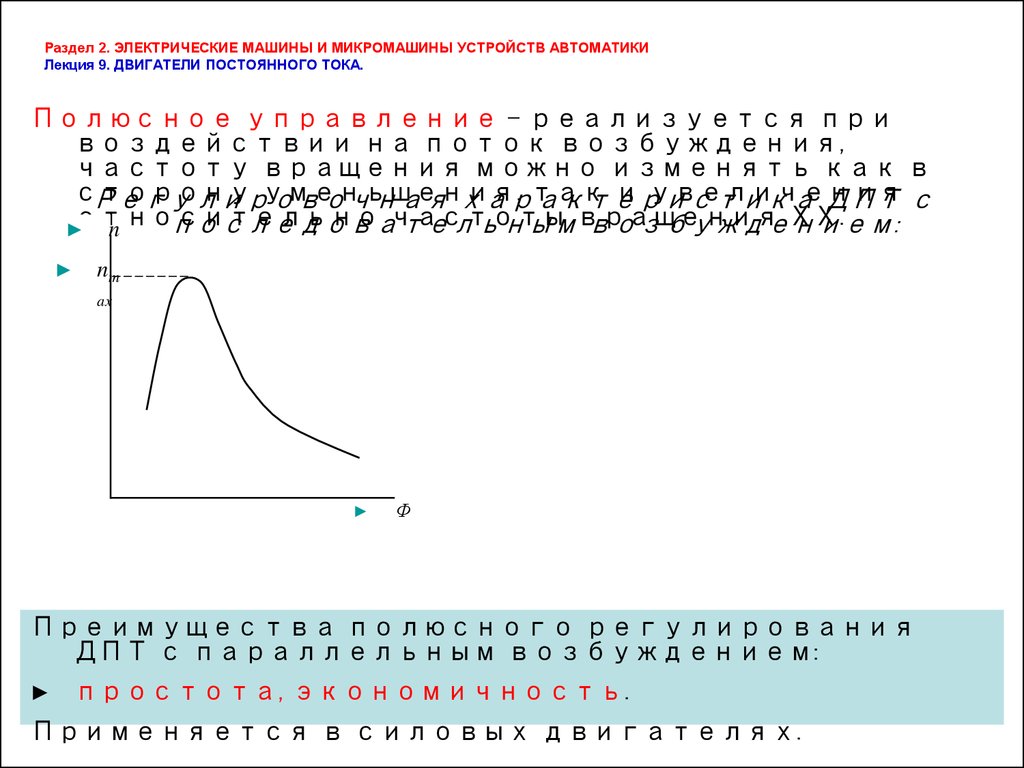
Полюсное управление – реализуется при
воздействии на поток возбуждения,
частоту вращения можно изменять как в
сторону
уменьшения,
так и увеличения
Регулировочная
характеристика
ДПТ с
относительно
частоты
вращения
ХХ.
последовательным возбуждением:
► n
nm
ax
Ф
Преимущества полюсного регулирования
ДПТ с параллельным возбуждением:
простота, экономичность.
Применяется в силовых двигателях.
26.
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА.
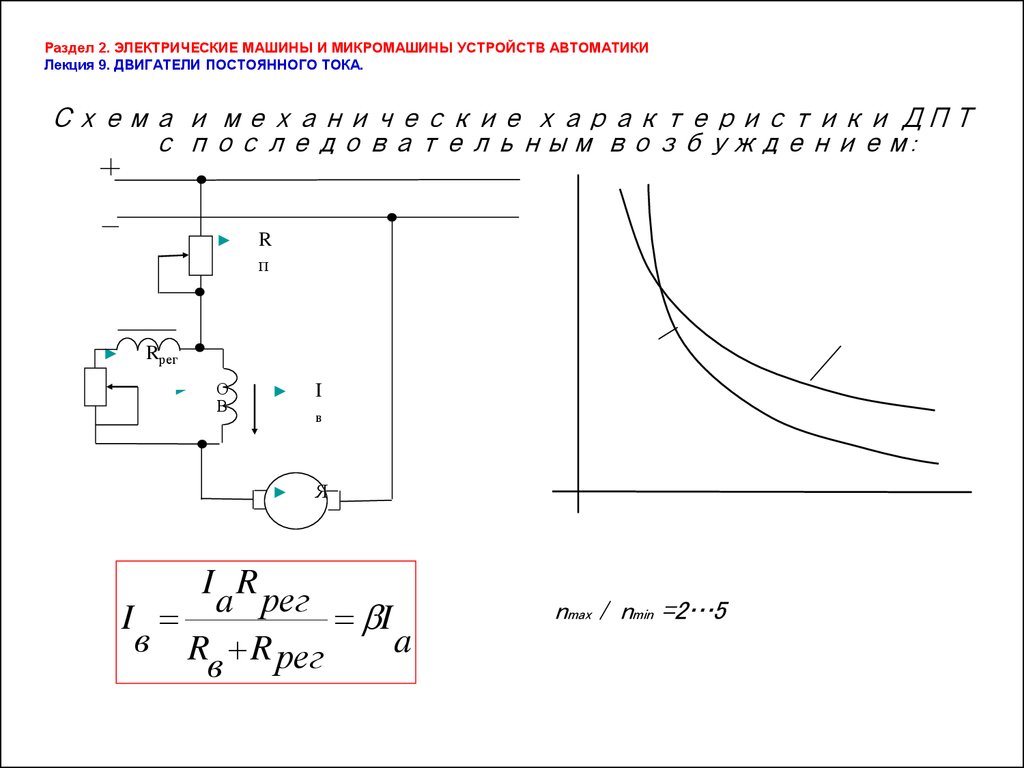
Схема и механические характеристики ДПТ
с последовательным возбуждением:
R
П
Rрег
О
В
I
в
Я
I R
I a рег I
в R R рег
a
в
nmax / nmin =2…5
27.
Электромагнитная техникаЛекция 10
ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА
(продолжение).
10.1 Микродвигатели постоянного тока.
10.2 Универсальные коллекторные двигатели.
10.3 Исполнительные ДПТ.
10.4 Тахогенераторы.
28.
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА (продолжение).
10.1 Микродвигатели постоянного тока.
Микродвигатели – маломощные
малогабаритные двигатели для систем
авто-матики и управления.
Микродвигатели:
обычной конструкции;
с полым якорем;
с печатной обмоткой якоря (дисковый или
цилиндрический якорь).
Достоинства: малый момент инерции, высокое
быстродействие и момент, при печатной
обмотке якоря – повышенная
перегрузочная способность.
10.2 Универсальные коллекторные двигатели.
Недостатки: высокая МДС якоря, повышенные
Универсальные
двигатели –
потери, малый коллекторные
КПД.
работают на постоянном и переменном
токе при использовании
последовательного возбуждения.
При изменении направления тока
одновременно изменяется знак потока
mвsin(
t ).
возбуждения
результате
i(t ) I m sin t;и потока якоря,
направление вращения якоря не
изменяется.
29.
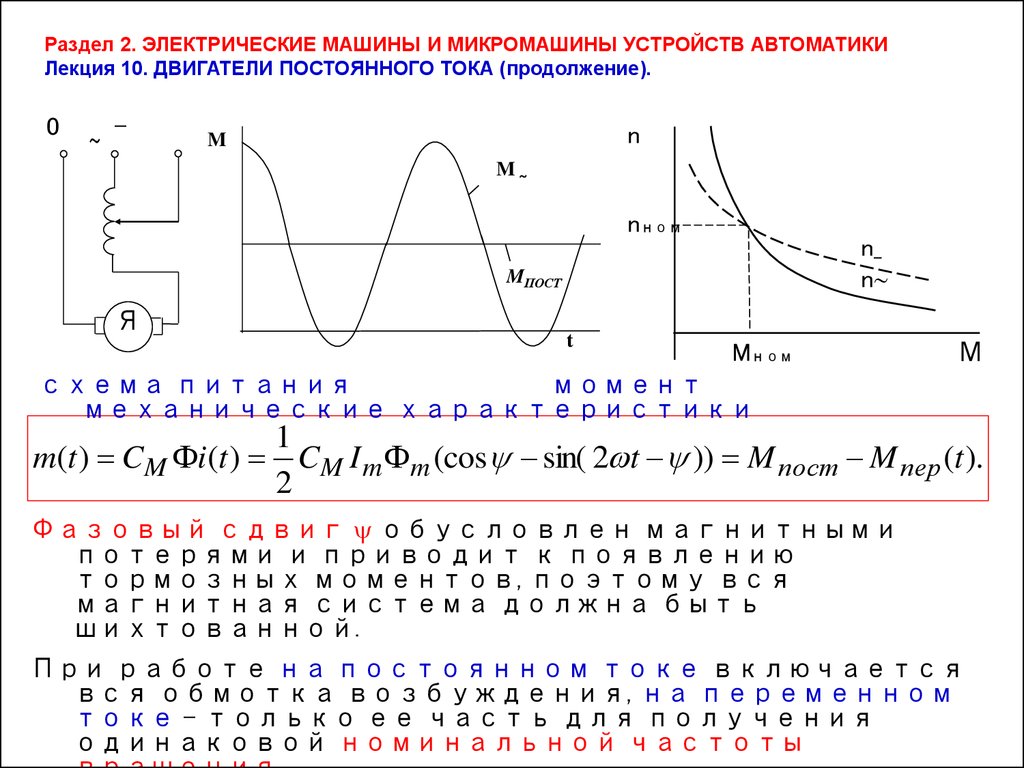
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА (продолжение).
0
~
-
n
M
M
nном
n_
n
MПОСТ
Я
t
Mном
М
схема питания
момент
механические характеристики
1
m(t ) CM i (t ) CM I m m (cos sin( 2 t )) M пост M пер (t ).
2
Фазовый сдвиг обусловлен магнитными
потерями и приводит к появлению
тормозных моментов, поэтому вся
магнитная система должна быть
шихтованной.
При работе на постоянном токе включается
вся обмотка возбуждения, на переменном
токе – только ее часть для получения
одинаковой номинальной частоты
30.
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция
10. ДВИГАТЕЛИ ПОСТОЯННОГО
ТОКА (продолжение).
В качестве
исполнительных
используют
двигатели независимого возбуждения
10.3 Исполнительные
ДПТ.
обычной
конструкции
, или (для повышения
быстродействия) с полым или дисковым
якорем.
Достоинства исполнительных ДПТ:
► прямолинейные механические и
регулировочные характеристики;
► простые способы управления;
► широкий диапазон регулирования
частоты вращения;
► отсутствие самохода;
► большой пусковой момент;
► малая мощность управления;
► быстродействие;
► малые габариты.
Недостатки:
► наличие скользящего контакта между
щётками и коллектором;
► малый срок службы коллекторнощёточного устройства.
Управление исполнительными ДПТ:
якорное и полюсное.
31.
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА (продолжение).
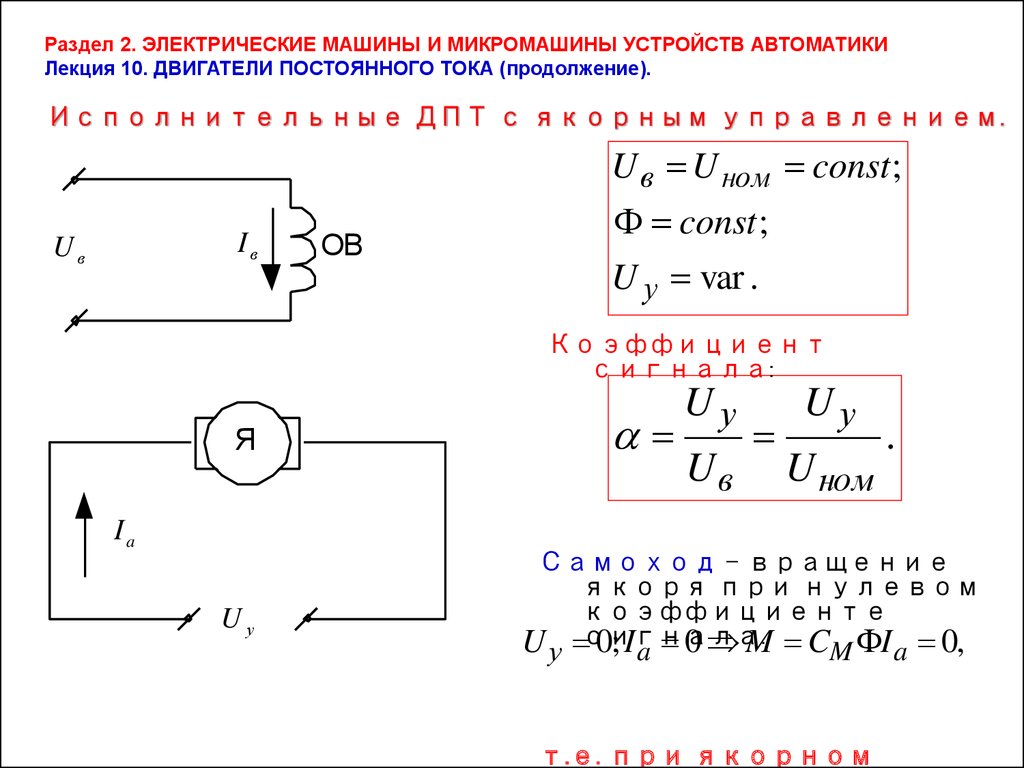
Исполнительные ДПТ с якорным управлением.
Iв
Uв
U в U ном const ;
const ;
OB
U у var .
Коэффициент
сигнала:
Я
Ia
Uу
Uу
Uв
Uу
U ном
.
Самоход – вращение
якоря при нулевом
коэффициенте
U сигнала.
0; I 0 M C I 0,
у
a
M
т.е. при якорном
a
32.
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА (продолжение).
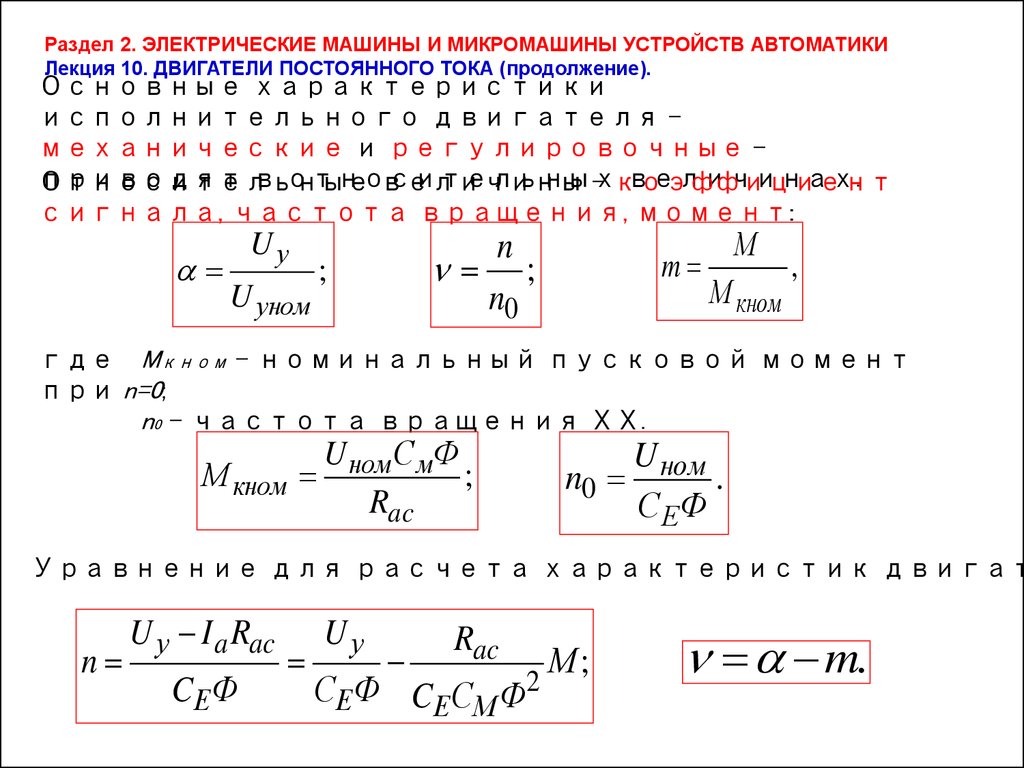
Основные характеристики
исполнительного двигателя –
механические и регулировочные –
приводят
в относительных
величинах.
Относительные
величины - коэффициент
сигнала, частота вращения, момент:
Uу
U уном
n
;
n0
;
m
М
М кном
,
где Mкном – номинальный пусковой момент
при n=0;
n0 - частота вращения ХХ.
U ном С мФ
М кном
;
Rac
U ном
n0
.
С ЕФ
Уравнение для расчета характеристик двигат
n
U у I a Rac
C ЕФ
Uу
Rac
С Е Ф C Е СМ Ф
2
М;
m.
33.
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА (продолжение).
Характеристики исполнительного ДПТ с
якорным управлением:
f ( ) , m const .
;
0,8
1,0
1,0
0,6
0,6
0,
75
=0
m
0,4
25
Механическая
Регулировочная
0,4
0,
1,0
f (m) , const .
0,5
0,5
0,
75
0,2
0,
m
25
0,2
0,4
0,6
0,8
1,0
0,2
0,4
0,6
0,8
34.
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА (продолжение).
Особенности характеристик при якорном
управлении:
Механическая и регулировочная
характеристики линейны;
При пуске (ν = 0) m=max;
mк= α (т.е. Мп~Uу);
Напряжение трогания (ν =0) Uтр~Мс, т.к.
m;
ν0 = α (т.е. n~Uу);
;
При α= 1
ν = max.
αтр=
35.
Электромагнитная техникаЛекция 11
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА.
11.1 Общие сведения.
11.2 Магнитное поле машины переменного тока.
11.3 Асинхронные машины переменного тока.
11.4 Конструкция и принцип действия.
36.
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА.
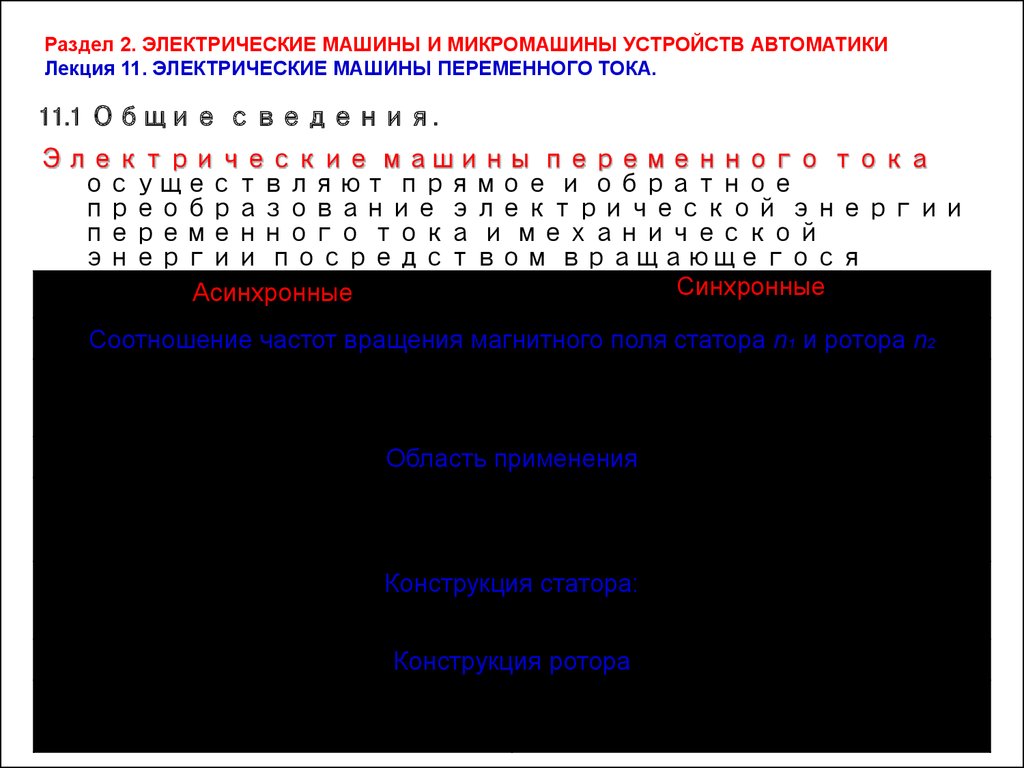
11.1 Общие сведения.
Электрические машины переменного тока
осуществляют прямое и обратное
преобразование электрической энергии
переменного тока и механической
энергии посредством вращающегося
электромагнитного
поля.
Синхронные
Асинхронные
Электрические машины
переменного тока
;
Соотношение частот вращения магнитного поля статора n1 и ротора n2
n1 n2
n1 n2
Область применения
Двигатели до 100 кВт, тахогенераторы
Двигатели до 1 кВт, более 100 кВт,
генераторы
Конструкция статора:
одно-, двух-, трехфазная пазовая распределенная обмотка
Конструкция ротора
Фазный ротор, «беличья клетка»
С постоянными магнитами, обмоткой
возбуждения, пассивный
37.
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА.
Основные элементы конструкции:
1. Сердечник статора;
Сердечник ротора;
2. Корпус; 3.
4. Вал;
5. Обмотки статора и ротора (на рисунке не
показаны).
;
Исторически первыми машинами
переменного тока были генераторы Фарадея и др. ученых, относящиеся к концу 18-го
века.
Долгое время машины постоянного тока
имели более высокие характеристики и
совершенную конструкцию, пока в конце 19го века не была изобретена трехфазная
38.
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА.
11.2 Магнитное поле машины переменного
тока.
Обмотка статора представляет собой
распределенную по окружности обмотку,
уложенную в пазах статора, витки
которой состоят из активных
проводников и соединяющих их лобовых
частей.
;
Активные проводники
однослойная
двухслойная
и лобовая часть витка
обмотки
В зависимости от способа заполнения
паза обмотки статора бывают
однослойные и двухслойные.
Проводники обмотки соединяются в секции,
39.
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА.
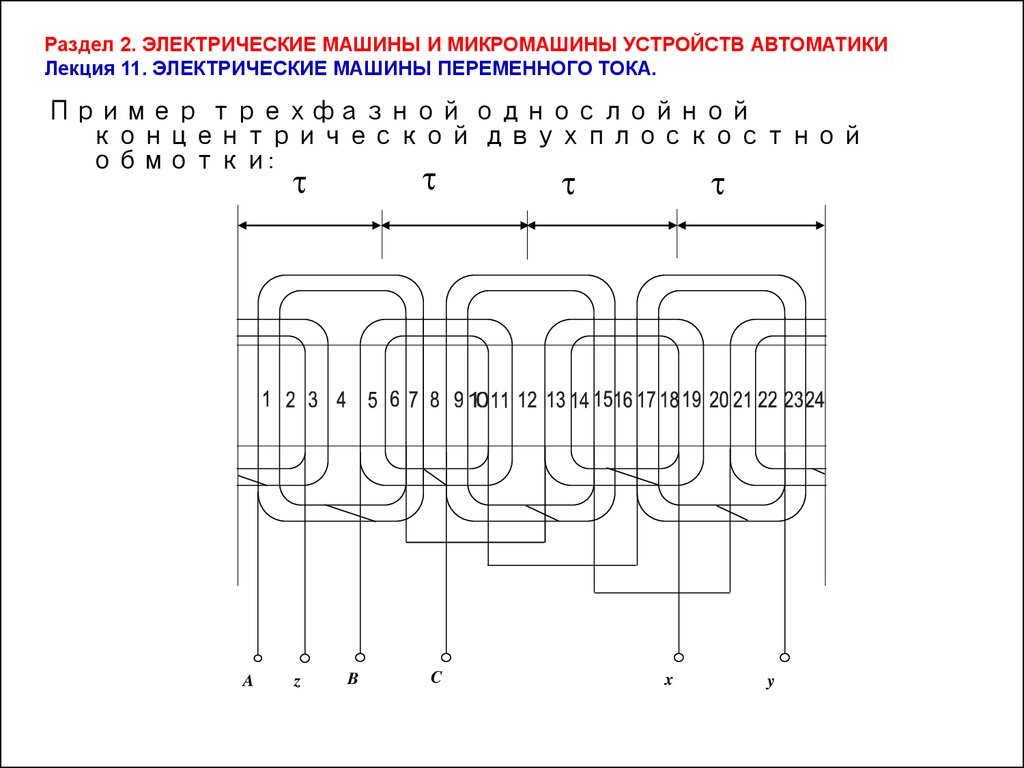
Пример трехфазной однослойной
концентрической двухплоскостной
обмотки:
;
A
z
B
C
x
y
40.
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА.
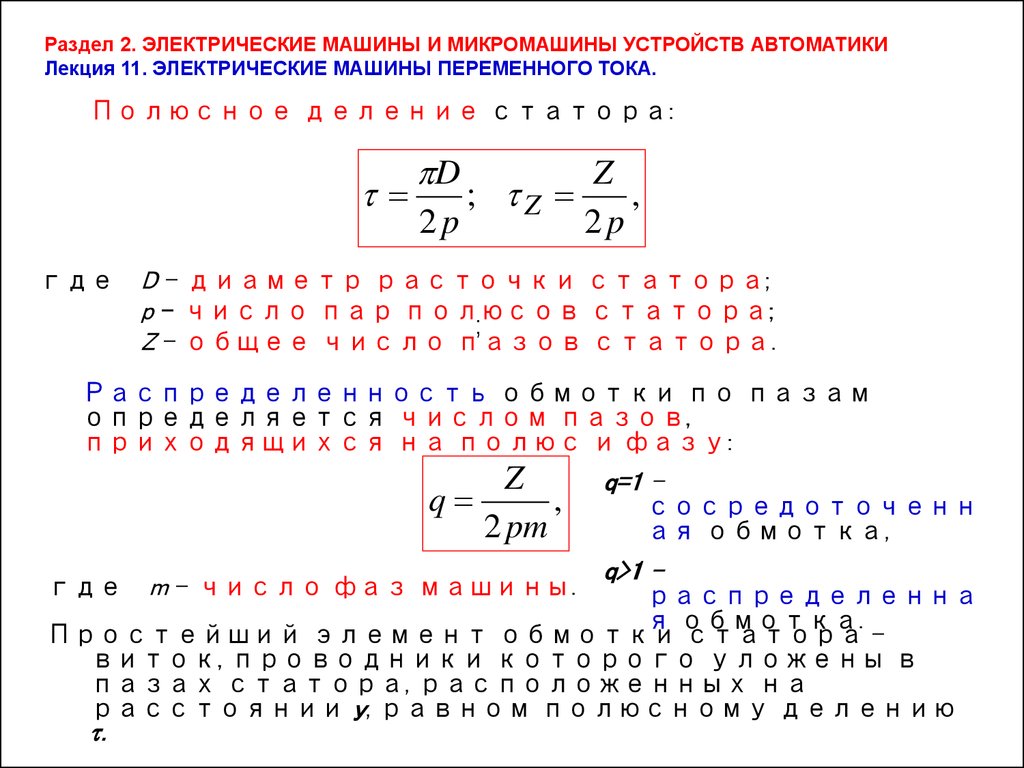
Полюсное деление статора:
D
Z
; Z
,
2p
2p
где
D – диаметр расточки статора;
p – число пар полюсов статора;
;
Z – общее число пазов статора.
Распределенность обмотки по пазам
определяется числом пазов,
приходящихся на полюс и фазу:
Z
q
,
2 pm
где m – число фаз машины.
q=1 –
сосредоточенн
ая обмотка,
q>1 –
распределенна
я обмотка.
Простейший элемент обмотки статора –
виток, проводники которого уложены в
пазах статора, расположенных на
расстоянии y, равном полюсному делению
.
41.
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА.
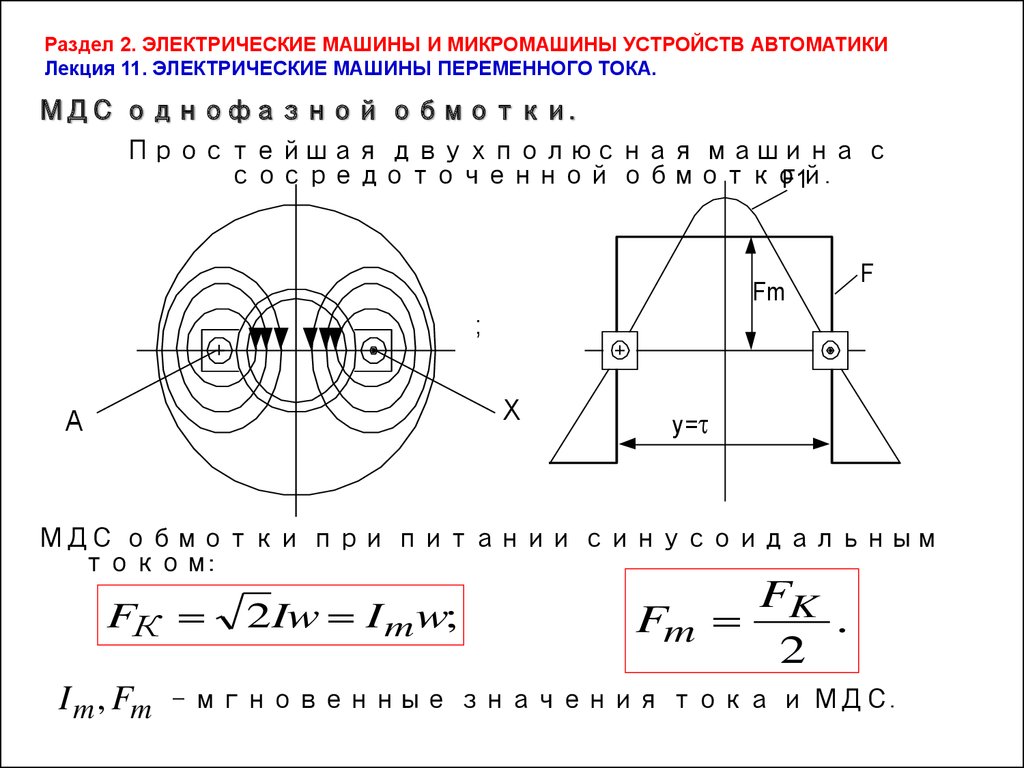
МДС однофазной обмотки.
Простейшая двухполюсная машина с
сосредоточенной обмоткой.
F1
Fm
F
;
Х
А
y=
МДС обмотки при питании синусоидальным
током:
FК
I m , Fm
2Iw I m w;
FK
Fm
.
2
- мгновенные значения тока и МДС.
42.
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА.
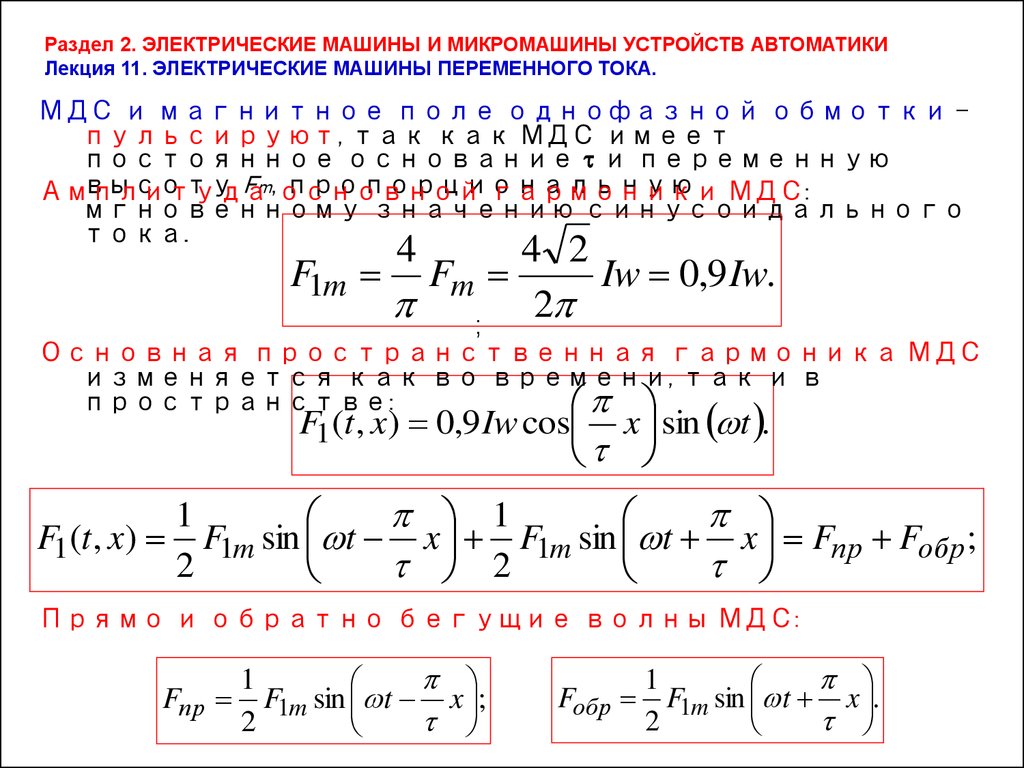
МДС и магнитное поле однофазной обмотки пульсируют, так как МДС имеет
постоянное основание и переменную
высоту Fm,основной
пропорциональную
Амплитуда
гармоники МДС:
мгновенному значению синусоидального
тока.
4
4 2
F1m Fm
Iw 0,9 Iw.
; 2
Основная пространственная гармоника МДС
изменяется как во времени, так и в
пространстве:
F1 (t , x) 0,9 Iw cos x sin t .
1
1
F1 (t , x) F1m sin t x F1m sin t x Fпр Fобр ;
2
2
Прямо и обратно бегущие волны МДС:
Fпр
1
F1m sin t x ;
2
Fобр
1
F1m sin t x .
2
43.
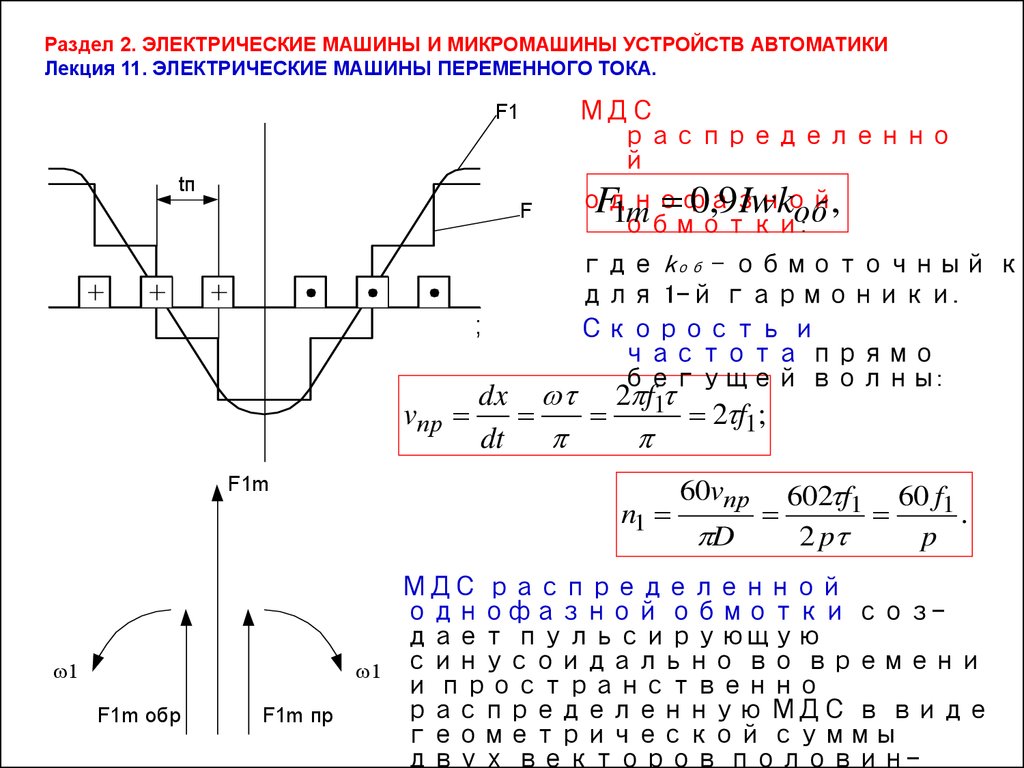
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА.
МДС
распределенно
й
F1
tп
однофазной
F1m 0,9Iwkоб ,
обмотки:
F
где kоб – обмоточный ко
для 1-й гармоники.
;
Скорость и
частота прямо
бегущей волны:
dx 2 f1
vпр
2 f1;
dt
F1m
F1m обр
n1
60vпр
D
602 f1 60 f1
.
2 p
p
МДС распределенной
однофазной обмотки создает пульсирующую
синусоидально во времени
и пространственно
распределенную МДС в виде
F1m пр
геометрической суммы
двух векторов половин-
44.
Электромагнитная техникаЛекция 12
АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ.
12.1 Основные уравнения, схема замещения АД.
12.2 Энергетическая диаграмма и вращающий момент.
12.3 Основные характеристики АД.
45.
Электромагнитная техникаЛекция 13
АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ (часть 2).
13.1 Конструкции АД.
13.2 Пуск и устойчивость работы АД.
13.3 Регулирование АД.
46.
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ (часть 2)
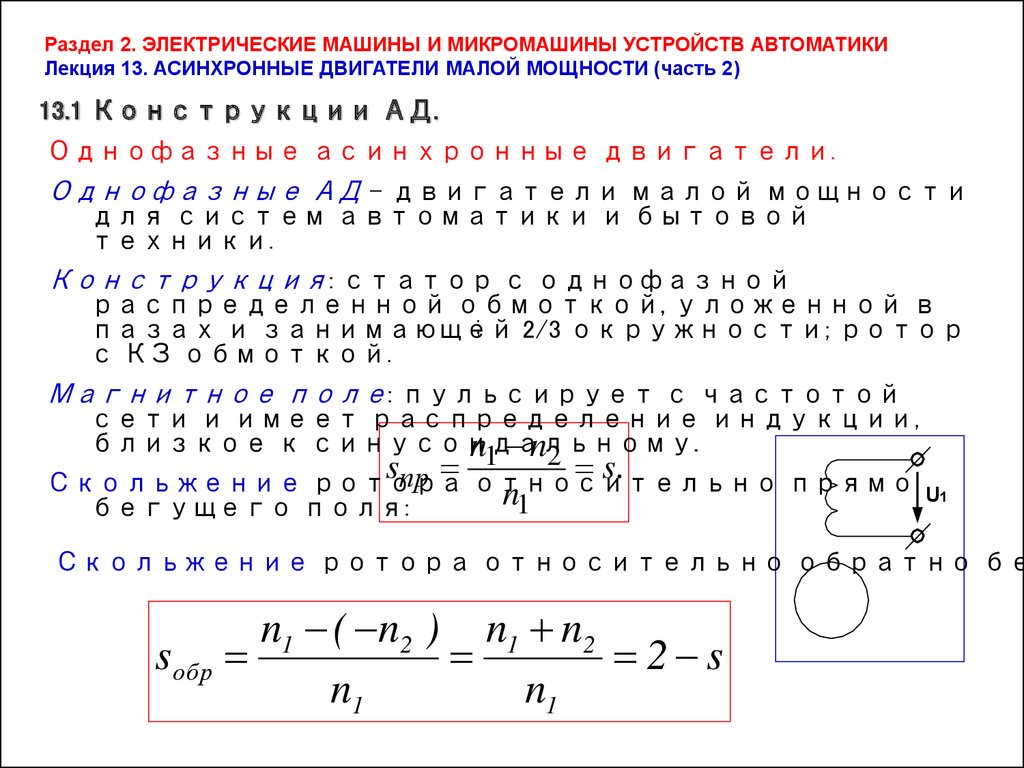
13.1 Конструкции АД.
Однофазные асинхронные двигатели.
Однофазные АД – двигатели малой мощности
для систем автоматики и бытовой
техники.
Конструкция: статор с однофазной
распределенной обмоткой, уложенной в
;
пазах и занимающей
2/3 окружности; ротор
с КЗ обмоткой.
Магнитное поле: пульсирует с частотой
сети и имеет распределение индукции,
близкое к синусоидальному.
n n
1
2 s.
s
пр относительно прямо
Скольжение ротора
n1
бегущего поля:
U1
Скольжение ротора относительно обратно бе
n1 ( n2 ) n1 n2
sобр
2 s
n1
n1
47.
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ (часть 2)
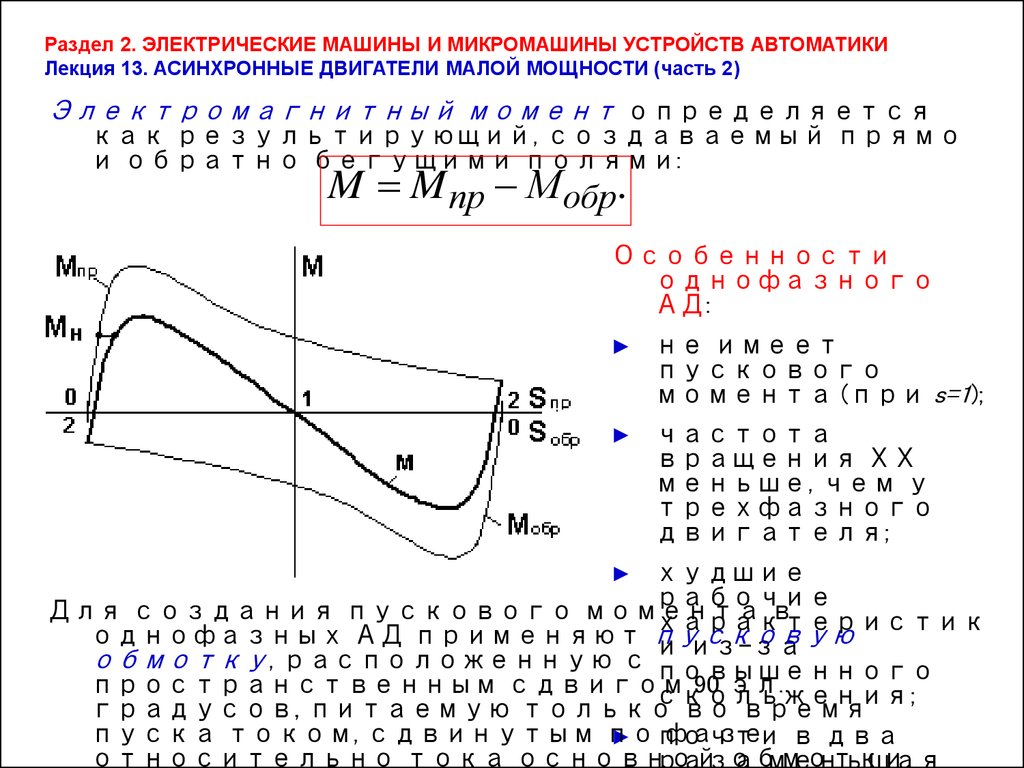
Электромагнитный момент определяется
как результирующий, создаваемый прямо
и обратно бегущими полями:
M M пр М обр.
Особенности
однофазного
АД:
не имеет
пускового
момента (при s=1);
частота
вращения ХХ
меньше, чем у
трехфазного
двигателя;
худшие
рабочие
Для создания пускового момента
в
характеристик
однофазных АД применяют пусковую
и из-за
обмотку, расположенную с повышенного
пространственным сдвигом
90 эл.
скольжения;
градусов, питаемую только во время
пуска током, сдвинутым по
фазе в два
► почти
относительно тока основной обмотки
48.
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ (часть 2)
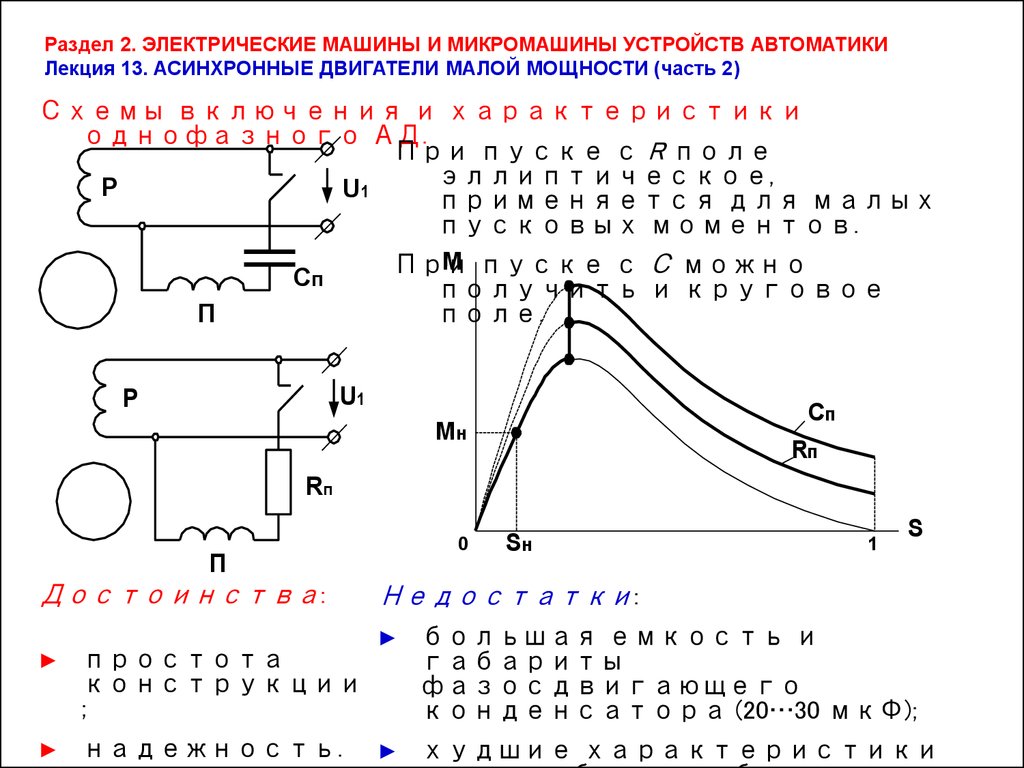
Схемы включения и характеристики
однофазного АД.
При пуске с R поле
эллиптическое,
Р
U1
применяется для малых
пусковых моментов.
M пуске с С можно
При
Сп
получить и круговое
П
поле.
Р
U1
Сп
Mн
Rп
Rп
П
Достоинства:
простота
конструкции
;
надежность.
0
Sн
1
S
Недостатки:
большая емкость и
габариты
фазосдвигающего
конденсатора (20…30 мкФ);
худшие характеристики
49.
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ (часть 2)
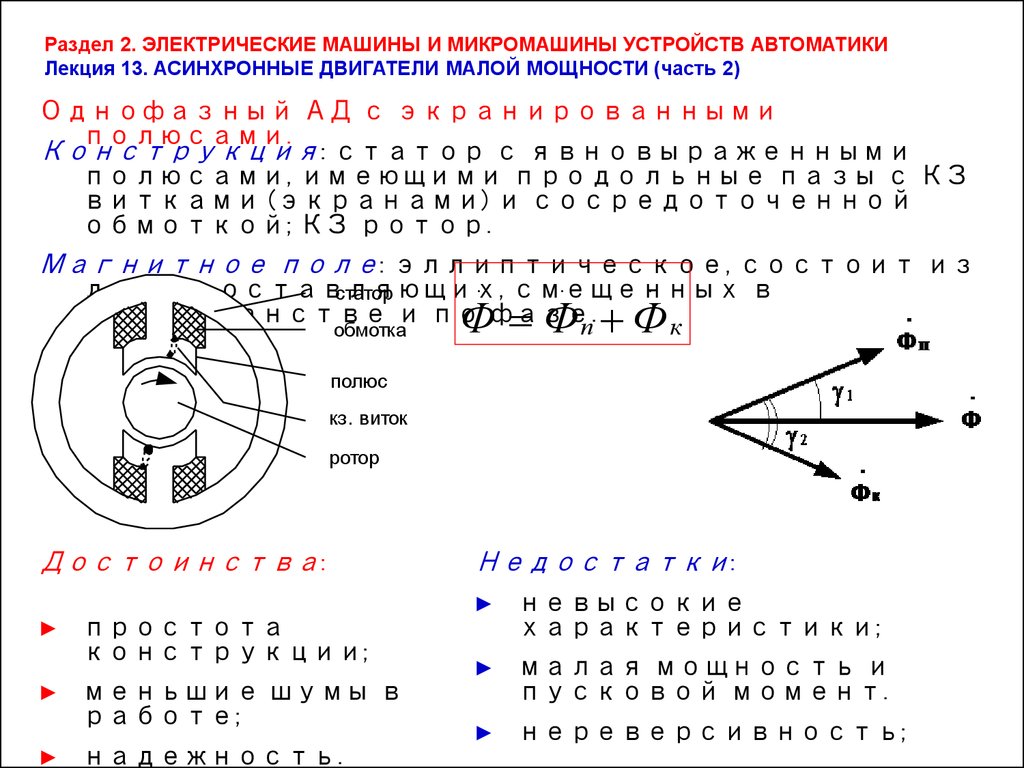
Однофазный АД с экранированными
полюсами.
Конструкция: статор с явновыраженными
полюсами, имеющими продольные пазы с КЗ
витками (экранами) и сосредоточенной
обмоткой; КЗ ротор.
Магнитное поле: эллиптическое, состоит из
. смещенных
.
.
двух составляющих,
в
статор
пространстве и по фазе.
п
к
обмотка
Ф Ф Ф
полюс
кз. виток
ротор
Достоинства:
простота
конструкции;
меньшие шумы в
работе;
надежность.
Недостатки:
невысокие
характеристики;
малая мощность и
пусковой момент.
нереверсивность;
50.
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ (часть 2)
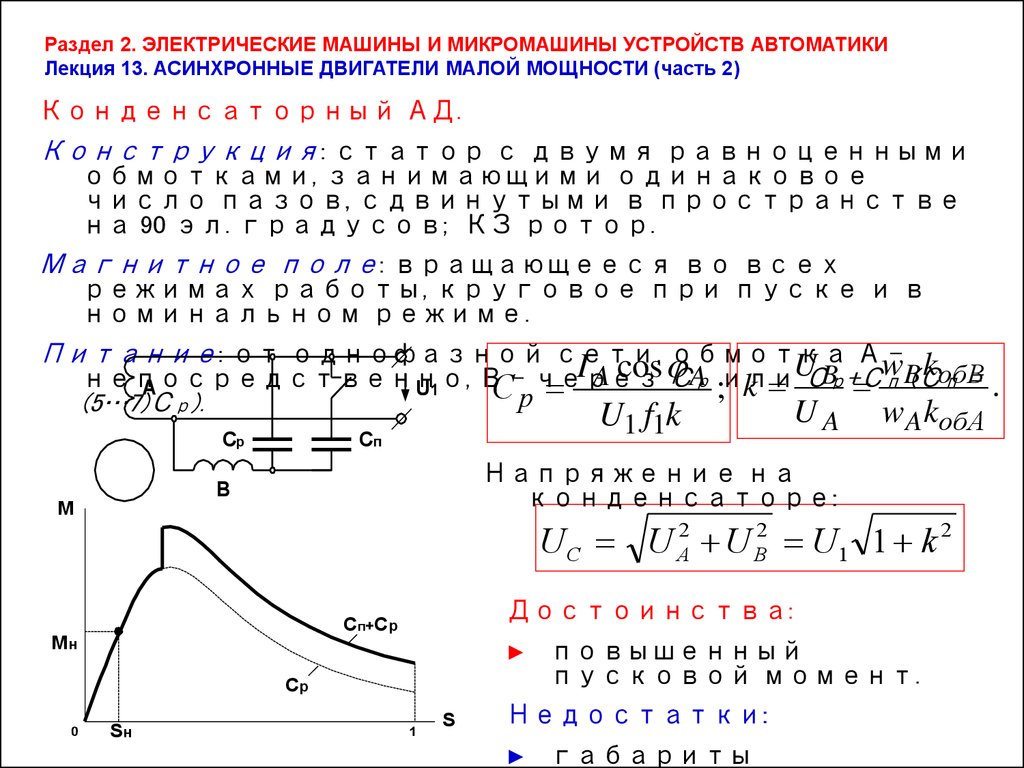
Конденсаторный АД.
Конструкция: статор с двумя равноценными
обмотками, занимающими одинаковое
число пазов, сдвинутыми в пространстве
на 90 эл. градусов; КЗ ротор.
Магнитное поле: вращающееся во всех
режимах работы, круговое при пуске и в
номинальном режиме.
Питание: от однофазной сети, обмотка
Аw
– k
U
I
cos
A
непосредственно,
ВС– через
СA
р или СB
р+Сп B
(СобВ
п =
А
U1
k
.
;
р
(5…7)Ср).
U A wAkобА
U1 f1k
Ср
Сп
Напряжение на
конденсаторе:
В
M
U C U A2 U B2 U1 1 k 2
Достоинства:
Сп+Cр
Mн
Cр
0
Sн
1
S
повышенный
пусковой момент.
Недостатки:
габариты
51.
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ (часть 2)
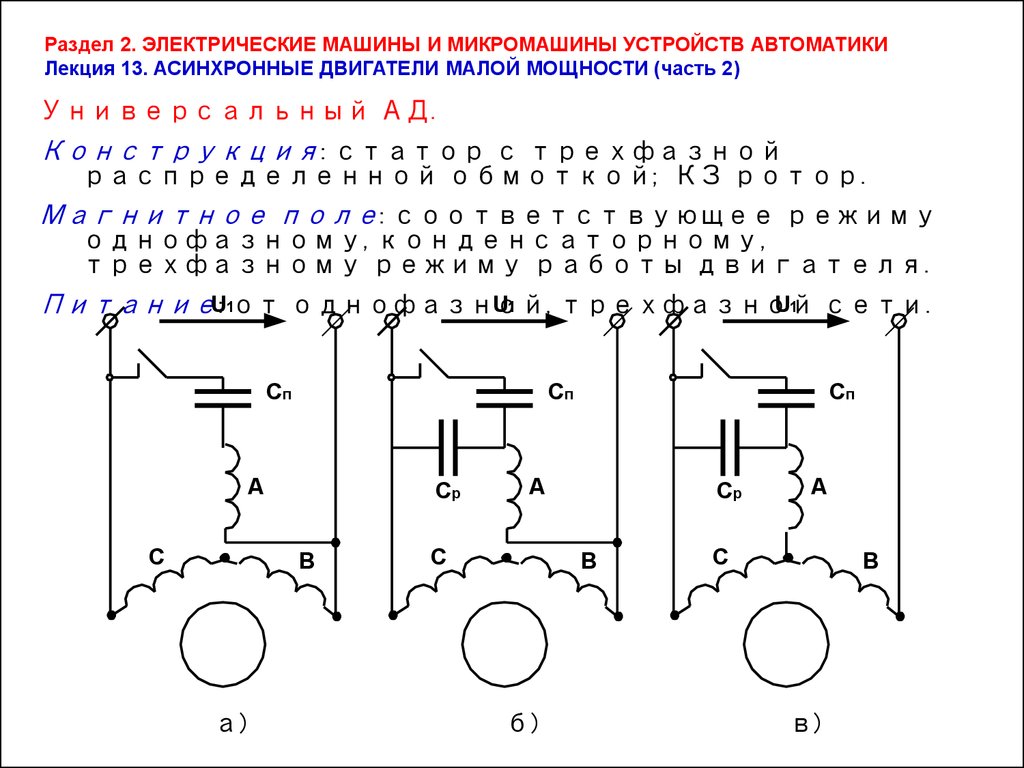
Универсальный АД.
Конструкция: статор с трехфазной
распределенной обмоткой; КЗ ротор.
Магнитное поле: соответствующее режиму
однофазному, конденсаторному,
трехфазному режиму работы двигателя.
U1
U1 сети.
ПитаниеU: 1от однофазной,
трехфазной
Cп
Cп
А
С
Cр
В
а)
Cп
А
С
Cр
В
б)
А
С
В
в)
52.
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ (часть 2)
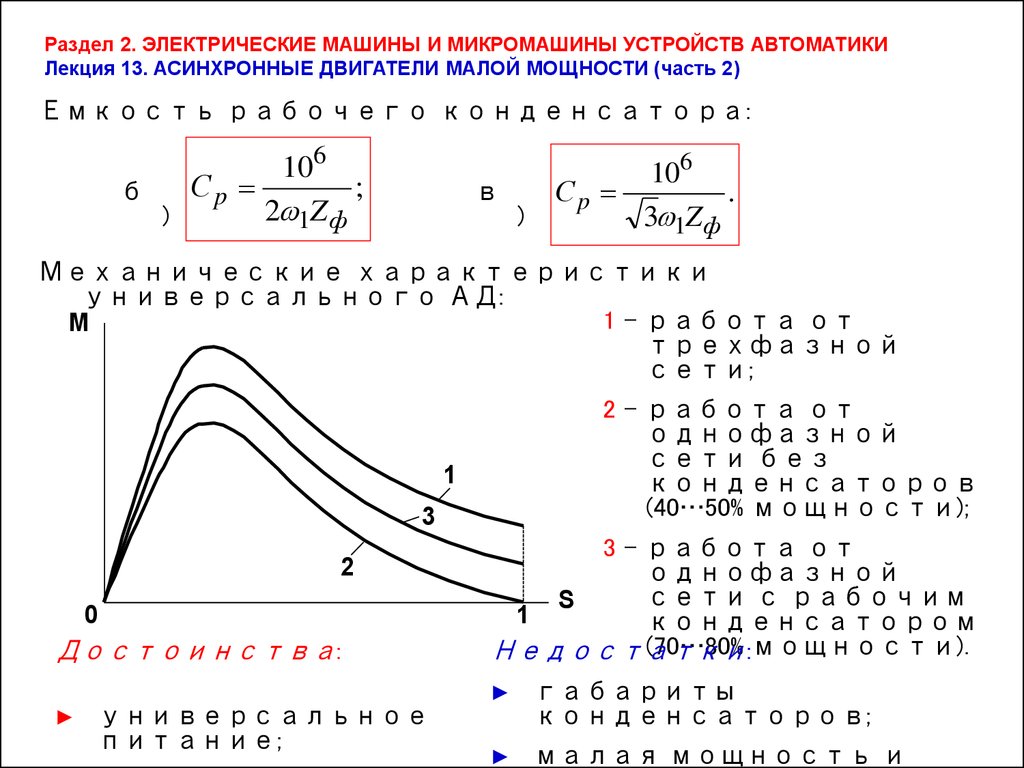
Емкость рабочего конденсатора:
106
Сp
;
б
2 1Z ф
)
в
)
106
Сp
.
3 1Z ф
Механические характеристики
универсального АД:
1 – работа от
M
трехфазной
сети;
2 – работа от
однофазной
сети без
конденсаторов
(40…50% мощности);
1
3
2
0
Достоинства:
универсальное
питание;
3 – работа от
однофазной
сети с рабочим
S
1
конденсатором
(70…80% :мощности).
Недостатки
габариты
конденсаторов;
малая мощность и
53.
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ (часть 2)
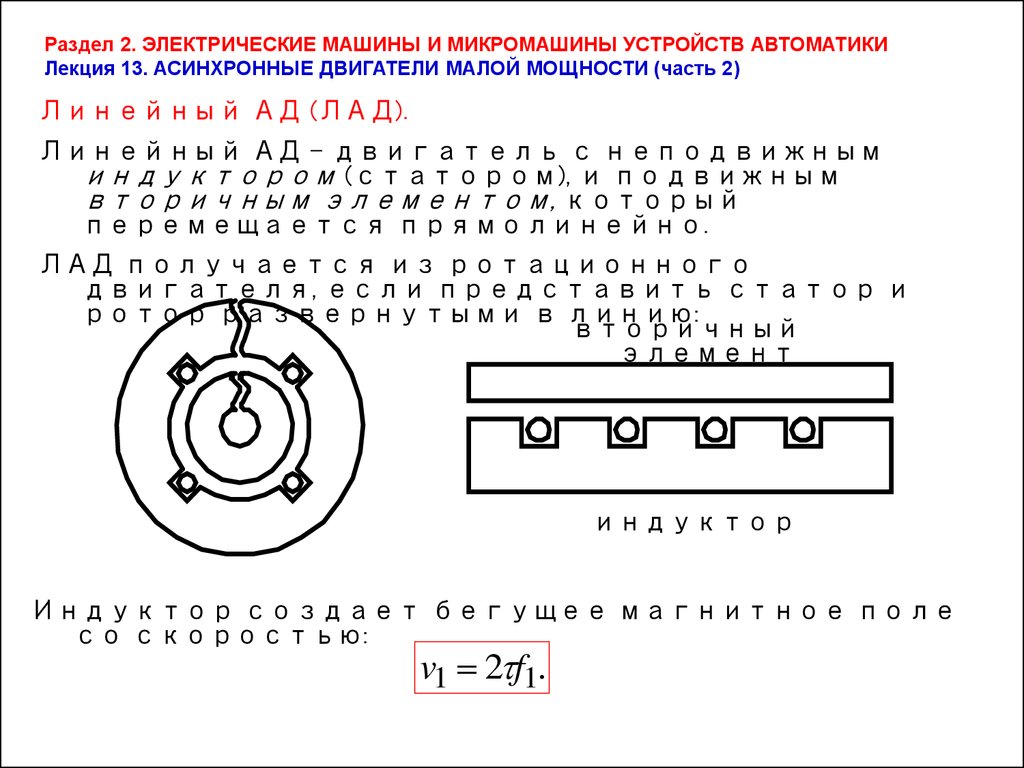
Линейный АД (ЛАД).
Линейный АД – двигатель с неподвижным
индуктором (статором), и подвижным
вторичным элементом, который
перемещается прямолинейно.
ЛАД получается из ротационного
двигателя, если представить статор и
ротор развернутыми в линию:
вторичный
элемент
индуктор
Индуктор создает бегущее магнитное поле
со скоростью:
v1 2 f1.
54.
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ (часть 2)
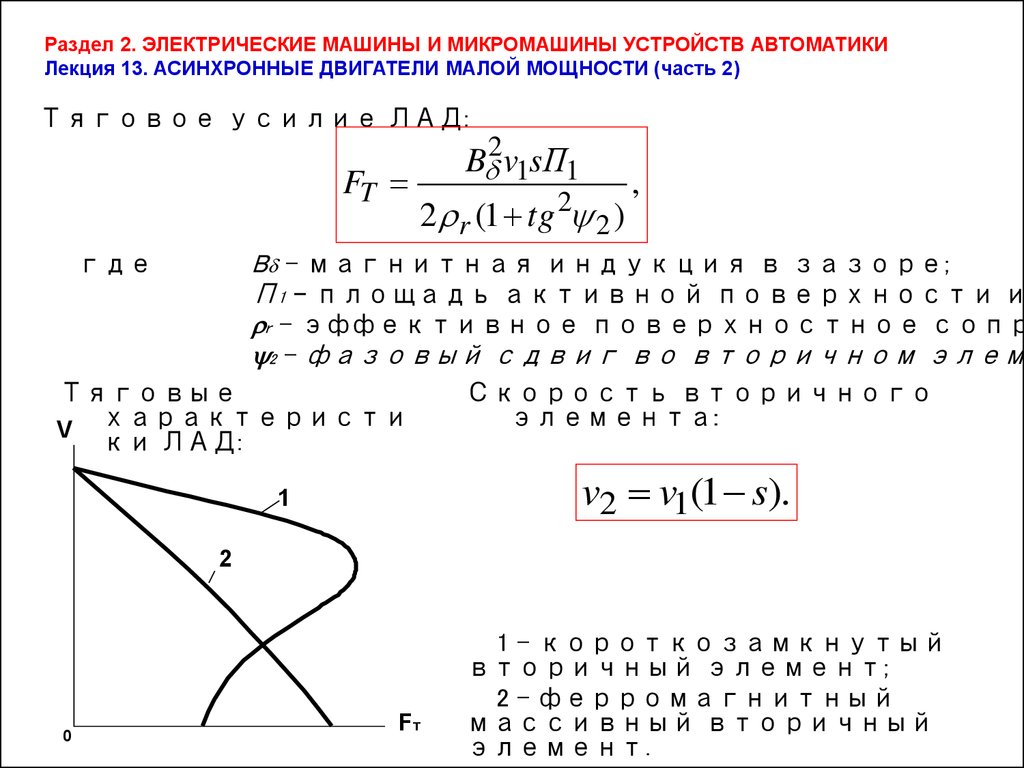
Тяговое усилие ЛАД:
FT
B 2v1sП1
2 r (1 tg 2 2 )
,
B – магнитная индукция в зазоре;
П1 – площадь активной поверхности и
r – эффективное поверхностное сопр
2 – фазовый сдвиг во вторичном элем
где
Тяговые
V характеристи
ки ЛАД:
Скорость вторичного
элемента:
v2 v1(1 s).
1
2
0
Fт
1 – короткозамкнутый
вторичный элемент;
2 – ферромагнитный
массивный вторичный
элемент.
55.
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ (часть 2)
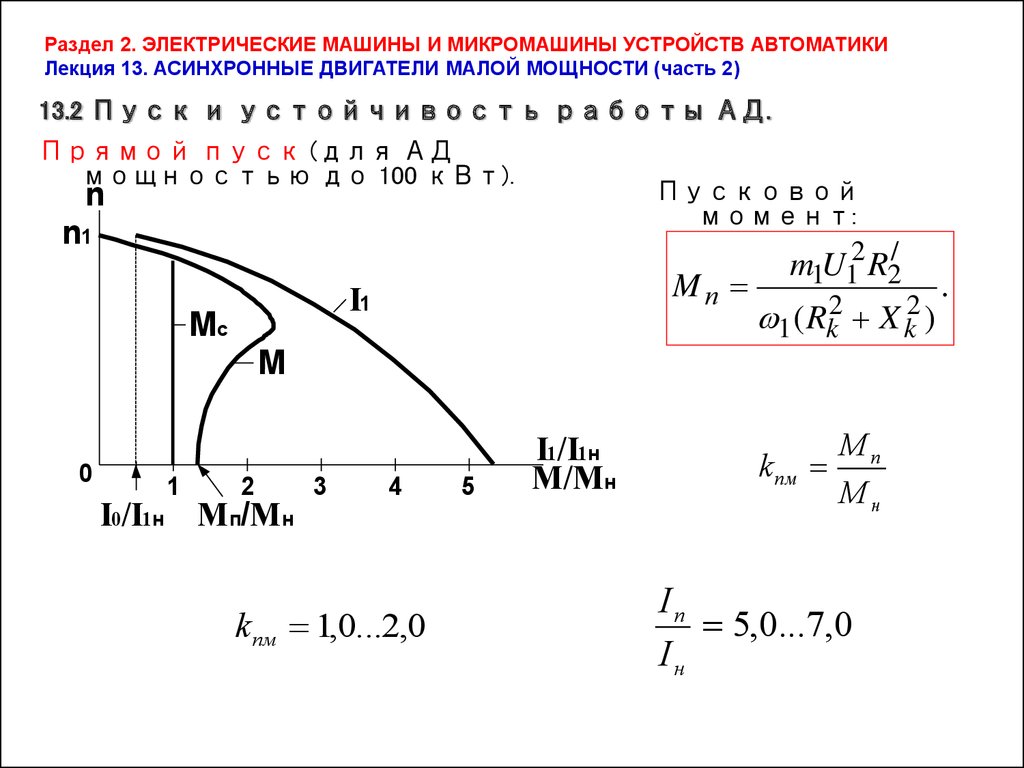
13.2 Пуск и устойчивость работы АД.
Прямой пуск (для АД
мощностью до 100 кВт).
Пусковой
момент:
n
n1
Mп
I1
Mc
m1U12 R2/
1 ( Rk2 X k2 )
M
0
1
2
I0/I1н Mп/Mн
3
4
kпм 1,0...2,0
5
I1/I1н
M/Mн
k пм
Mп
Мн
Iп
5,0...7,0
Iн
.
56.
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ (часть 2)
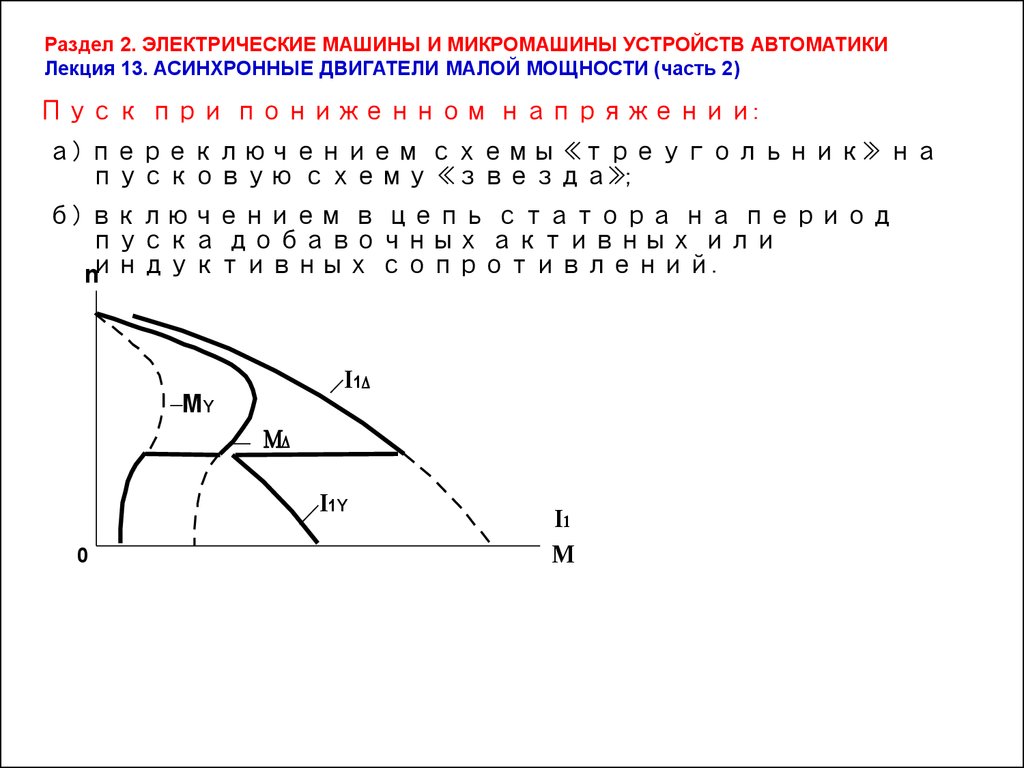
Пуск при пониженном напряжении:
а) переключением схемы «треугольник» на
пусковую схему «звезда»;
б) включением в цепь статора на период
пуска добавочных активных или
nиндуктивных сопротивлений.
I1
MY
I1Y
0
I1
M
57.
Электромагнитная техникаЛекция 14
ИСПОЛНИТЕЛЬНЫЕ ДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА.
АСИНХРОННЫЕ ТАХОГЕНЕРАТОРЫ.
14.1 Общие сведения и конструкция.
14.2 Способы регулирования.
14.3 Характеристики.
14.4 Асинхронные тахогенераторы.
58.
Электромагнитная техникаЛекция 15
СЕЛЬСИНЫ.
15.1 Общие сведения и конструкция.
15.2 Индикаторный режим сельсинов.
14.3 Трансформаторный режим сельсинов.
14.4 Дифференциальный сельсин.
59.
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 15. СЕЛЬСИНЫ
15.1 Общие сведения и конструкция.
Сельсины – электрические машины
переменного тока, относящиеся к
устройствам синхронной связи, которые
используются для измерения или
передачи на расстояние угловых
перемещений двух или нескольких валов,
механически не связанных друг с
другом.
Сельсин-датчик (СД) – один из сельсинов,
механически соединенный с ведущей
осью и преобразующий угол поворота в
электрический сигнал.
Сельсин-приемник (СП) – другой сельсин,
соединенный с ведомой осью
(непосредственно или с помощью
промежуточного исполнительного
двигателя) и преобразующий
электрический сигнал в угловое
перемещение.
Конструкция сельсинов: двухполюсные
статор и ротор с обмотками возбуждения
(однофазная или трехфазная) и
синхронизации (всегда трехфазная).
60.
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 15. СЕЛЬСИНЫ
При значительных мощностях в системах
«электрического вала» применяют
трехфазные сельсины, по конструкции
аналогичные АД с фазным ротором.
В системах автоматики обычно используют
Расположение
ОВ и ОС на
маломощные однофазные
сельсины.
статоре или роторе не
является
принципиальным
вопросом.
Явнополюсные сельсины с
сосредоточенной ОВ на
явновыраженных
полюсах, имеют
неравномерный
воздушный зазор для
более синусоидального
распределения
индукции.
ОВ – обмотка возбуждения;
ОС – обмотка синхронизации
Неявнополюсные сельсины –
с распределенной ОВ,
уложенной в
полузакрытых пазах.
Обмотка синхронизации
выполняется только
61.
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 15. СЕЛЬСИНЫ
Принцип действия системы связи с
сельсинами состоит в повороте ротора
СП на такой же угол п, как и угол
поворота СД д, который задается
ведущим валом.
Следовательно, система синхронной связи
из нескольких сельсинов стремится
д
п 0.
устранить угол
рассогласования
СД и
СП:
15.2 Индикаторный режим сельсинов.
Индикаторный режим сельсинов – СП
самостоятельно отрабатывает угол
поворота ротора СД, соединенного с
ведущим валом, и индицирует его с
помощью стрелки и шкалы. Применяется
для дистанционного измерения углового
перемещения ведущего
вала при малом
ЛС
моменте сопротивления на ведомом валу.
СД
СП
И
Структурная схема дистанционного
измерения углового перемещения
вала с индикаторным режимом
сельсинов.
62.
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 15. СЕЛЬСИНЫ
~U1
ОВ
СД
g
ОВ
СП
1
2
3
П
2
1
3
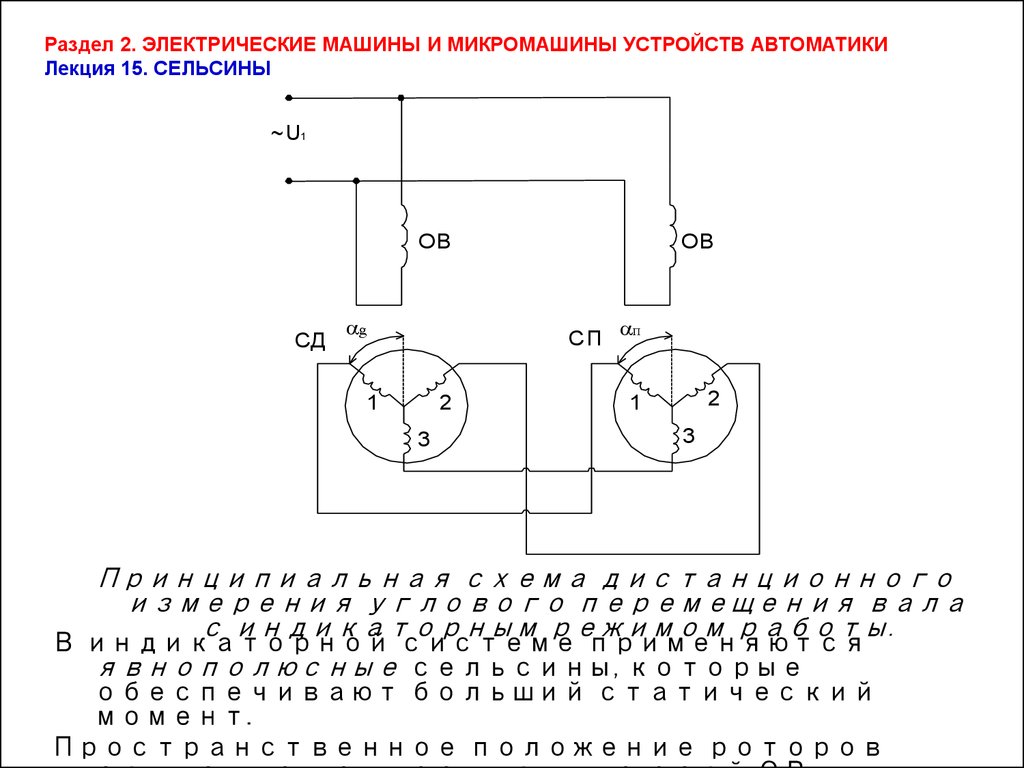
Принципиальная схема дистанционного
измерения углового перемещения вала
с индикаторным режимом работы.
В индикаторной системе применяются
явнополюсные сельсины, которые
обеспечивают больший статический
момент.
Пространственное положение роторов
63.
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 15. СЕЛЬСИНЫ
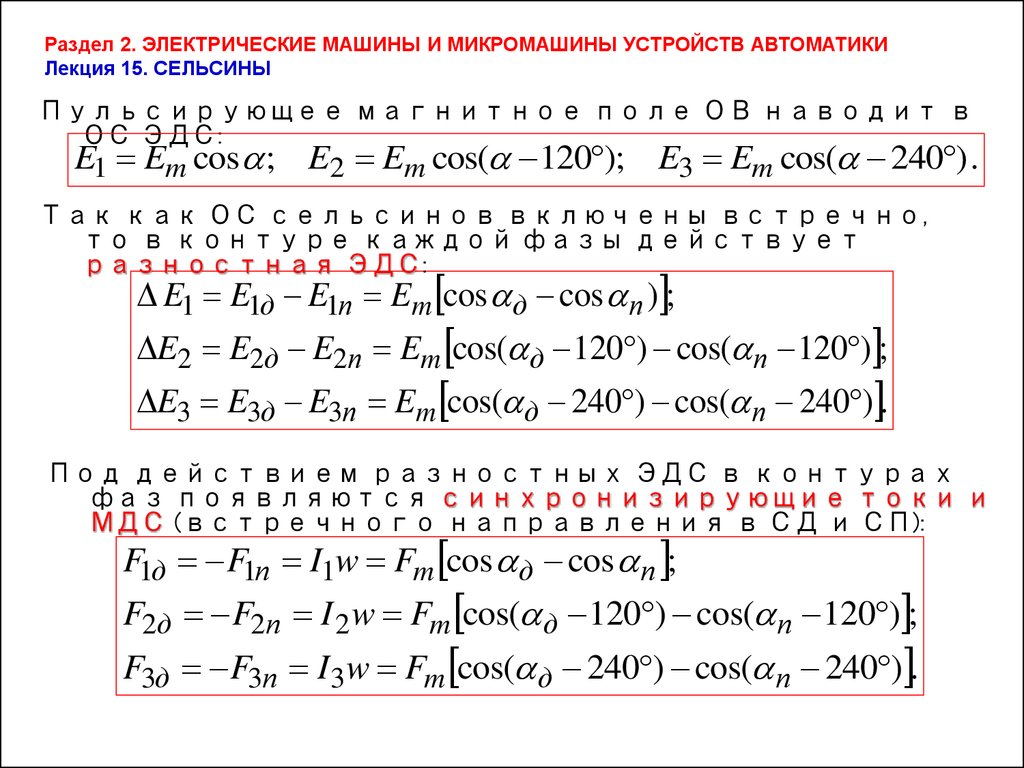
Пульсирующее магнитное поле ОВ наводит в
ОС ЭДС:
E1 Em cos ; E2 Em cos( 120 ); E3 Em cos( 240 ) .
Так как ОС сельсинов включены встречно,
то в контуре каждой фазы действует
разностная ЭДС:
E1 E1д E1п Em cos д cos п ) ;
E2 E2д E2п Em cos( д 120 ) cos( п 120 ) ;
E3 E3д E3п Em cos( д 240 ) cos( п 240 ) .
Под действием разностных ЭДС в контурах
фаз появляются синхронизирующие токи и
МДС (встречного направления в СД и СП):
F1д F1п I1w Fm cos д cos п ;
F2д F2п I 2 w Fm cos( д 120 ) cos( п 120 ) ;
F3д F3п I 3w Fm cos( д 240 ) cos( п 240 ) .
64.
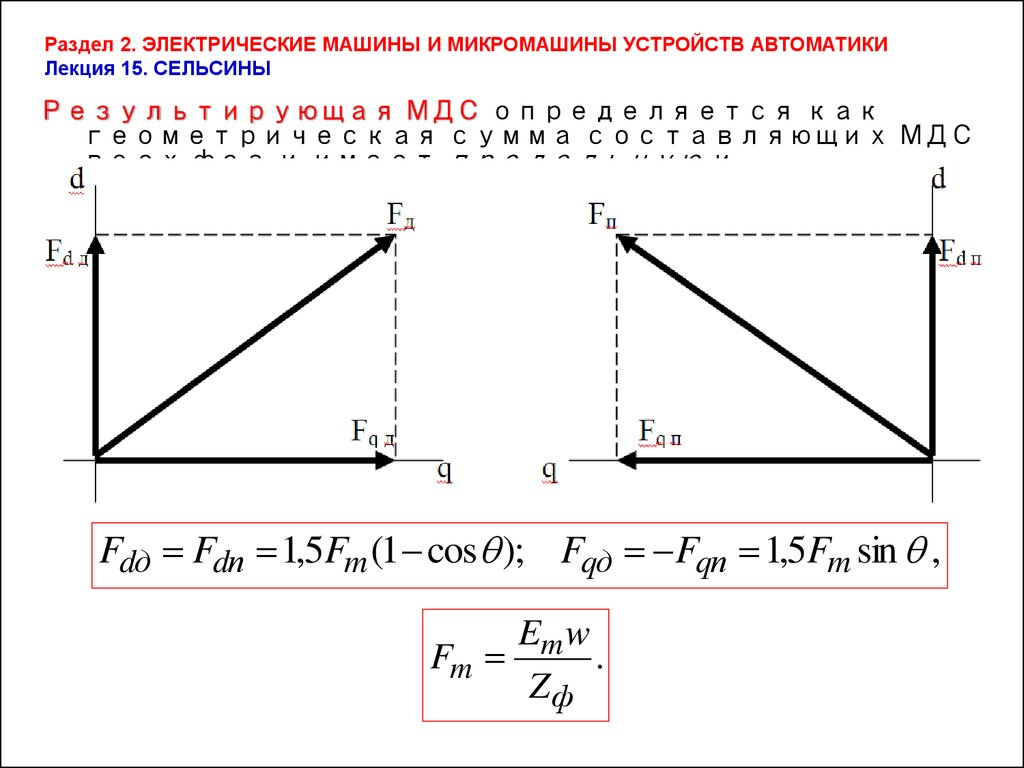
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 15. СЕЛЬСИНЫ
Результирующая МДС определяется как
геометрическая сумма составляющих МДС
всех фаз и имеет продольную и
поперечную составляющие:
Fdд Fdп 1,5Fm (1 cos ); Fqд Fqп 1,5Fm sin ,
Em w
Fm
.
Zф
65.
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 15. СЕЛЬСИНЫ
Взаимодействие потока, создаваемого
поперечной составляющей
результирующей МДС с потоком
возбуждения, действующим по продольной
оси, создает синхронизирующий момент
сельсина:
c
m
m
в q
M M sin ; M c F sin ,
где - угол фазового сдвига между Fq и E.
Продольная составляющая МДС момент не
создает, т.к. оказывает размагничивающее
действие на поток возбуждения.
Синхронизирующий момент действует на
роторы СД и СП в противоположных
направлениях, поэтому если роторы обоих
сельсинов растормозить, то будут
поворачиваться оба ротора до полного
устранения рассогласования угловых
положений.
Если ротор СД жестко связан с валом, то
поворачивается только ротор СП до
согласованного положения.
Для синхронизации в пределах одного
оборота ротора сельсины изготавливают
двухполюсными.
66.
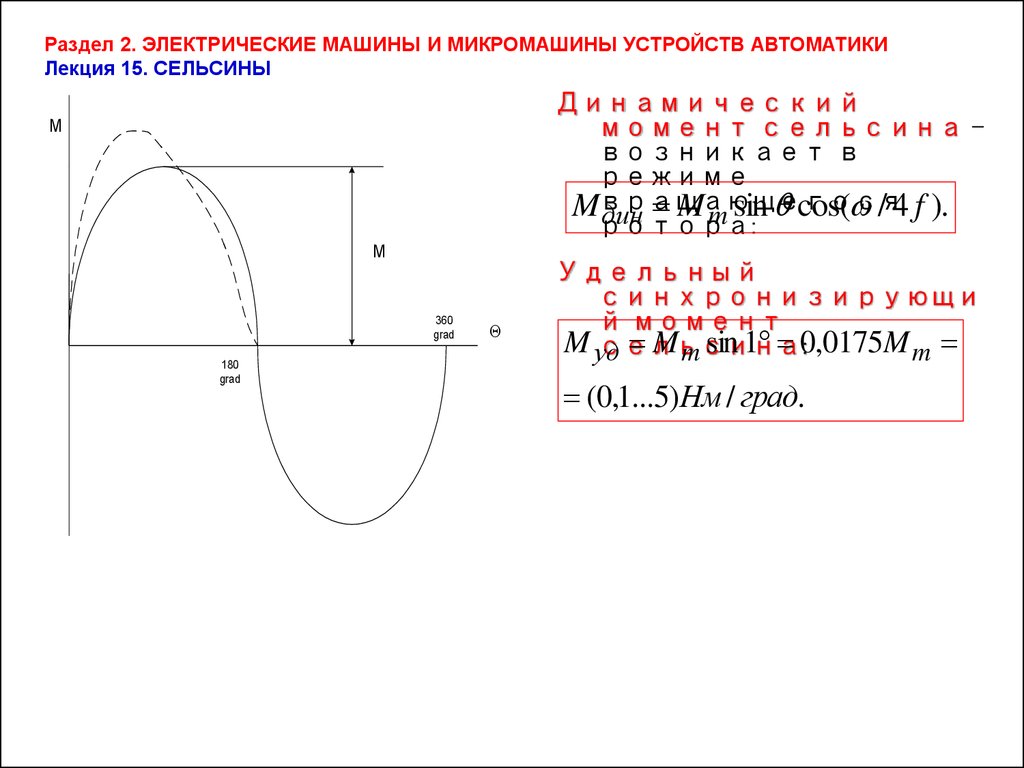
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИЛекция 15. СЕЛЬСИНЫ
Динамический
момент сельсина –
возникает в
режиме
Mвращающегося
M m sin cos( / 4 f ).
дин
ротора:
M
M
360
grad
180
grad
Удельный
синхронизирующи
й момент
M уд
M m sin 1 0,0175M m
сельсина:
(0,1...5) Нм / град.