



 mathematics
mathematicsSimilar presentations:




")





Параметры полета ракеты
1.
Тема 2.Параметры полета ракеты
2.
Понятие о математическоммоделировании движения
ракет
3.
Для решения практических задач могутиспользоваться как теоретические, так и
экспериментальные методы.
В баллистике ракет использование
летного эксперимента для решения
таких задач весьма ограничено и часто в
принципе невозможно.
Это обусловлено следующими
обстоятельствами:
4.
- подготовка и проведение летногоэксперимента приводит к фактическому
уничтожению испытуемого образца ракеты;
- большие материальные затраты на
проведение летного эксперимента;
- большие дальности полета, при которых ни
запланированная цель, ни реальная точка
падения БЧ не видны;
- большое влияние возмущающих факторов,
различное при каждом пуске, что исключает
возможность пролонгации их влияния
на последующие пуски;
5.
- большие временные затраты наподготовку и проведение каждого
эксперимента.
6.
При решении практических задачбаллистики ракет физическое
моделирование полета (летный
эксперимент) заменяется
математическим моделированием,
т. е. математическим расчетом
параметров движения
7.
Такое математическое моделированиеиногда называют «электронным
выстрелом», так как проводится на
ЭЦВМ.
В результате основным методом решения
всех практических задач в баллистике
ракет является метод математического
моделирования полета
при постановке минимального числа
летных экспериментов.
8.
Методы математического моделирования,кроме автоматизации численного анализа
полета, позволяют сочетать теоретические
исследования с экспериментальными.
Они дают возможность проведения
частичного эксперимента, т.е. такого
эксперимента, в котором движение ракеты
имитируется моделью, а система
управления или отдельные ее приборы
работают также, как и при действительном
полете ракет.
9.
При таком частичном экспериментедорогостоящие приборы системы
управления не уничтожаются, а
остаются невредимыми.
10.
Однако полет ракет и их БЧ является весьмасложным процессом так как подвержен
влиянию большого числа различных
факторов – случайных, трудно поддающихся
математическому описанию.
Поэтому любое математическое
моделирование полета проводится лишь в
некоторых идеализированных условиях.
Степень идеализации зависит от условий
решаемой задачи и может быть различной.
11.
В связи с этим для математическогомоделирования полета ракет и БЧ
создаются специальные
математические модели, отражающие
реальный полет с различной степенью
точности.
12.
Математическая модель движенияпредставляет собой объективную
схематизацию действительного
движения объекта в форме,
позволяющей проводить
различные теоретические
исследования и необходимые
вычисления для решения
поставленной задачи.
13.
Такой формой обычно являются:- системы дифференциальных уравнений
(обыкновенных или в частных
производных), разрабатываемые в рамках
теоретической механики и имеющие
смысл уравнений движения объекта;
- системы конечных аналитических
соотношений, если схема полета позволяет
получить аналитическое решение
уравнений движения.
14.
Конкретный вид математическоймодели движения определяется
принятыми при разработке модели
схемами ЛА как механической
системы, внешней среды,
определяющей силовое воздействие на
ЛА, а также системы отсчета и
выбранной системы координат.
15.
Выбор модели движения диктуется задачамипроводимых исследований и неоднозначен.
При этом к моделям часто предъявляются
противоречивые требования - адекватности,
точности, простоты, наглядности и др.
Поэтому в каждой конкретной технической
задаче обоснование и окончательный выбор
модели является результатом компромисса и
представляет собой важный этап процесса
моделирования полета.
16.
Этим же обстоятельствомобъясняется и наличие большого
числа различных математических
моделей движения, используемых
при решении практических задач.
17.
Все эти модели можноразделить на два вида:
детерминированные и
стохастические.
18.
К детерминированным моделямотносят модели, для которых
силы и моменты, действующие на
объект, имеют только
детерминированную составляющую.
Это означает, что характер
зависимости этой составляющей от
параметров движения, времени и
условий полета известен заранее.
19.
К стохастическим относят модели, длякоторых связь между параметрами
движения и временем известна лишь
приближенно и может быть представлена
некоторым распределением вероятности.
Для таких моделей предполагается, что
все или некоторые компоненты вектора
характеристик, определяющих силы и
моменты, действующие на объект,
содержат случайную составляющую
наряду с детерминированной.
20.
Как детерминированные, так истохастические модели могут
быть представлены в
дифференциальном или конечном
аналитическом виде в зависимости
от того, допускают или не допускают
дифференциальные уравнения
движения объекта получение
конечного аналитического решения.
21.
Для проведения математическогомоделирования полета модель движения должна
быть дополнена начальными условиями,
определяющими начальное состояние ракеты,
или соотношениями для их расчета, системой
ограничений или связей, определяющих
множество допустимых значений параметров
движения, параметров ракеты и ее системы
управления, а также условиями или алгоритмом
определения конечного состояния, т. е.
окончания процесса моделирования.
22.
В целом численноемоделирование полета
предполагает последовательное
выполнение следующих
основных операций:
23.
1. Схематизация полета,включающая в себя
схематизацию ракеты как
механической системы, системы
отсчета и условий полета, а
также схематизацию системы
управления полетом.
24.
2. Запись уравнений движения вскалярной форме при
соответствующем выборе систем
координат.
3. Задание начальных условий
для системы дифференциальных
уравнений движения или
соотношений для их расчета.
25.
4. Задание исходных данных поракете и ее системе управления,
включающих энергетические,
массово-инерционные,
аэродинамические, геометрические
и другие характеристики.
26.
5. Задание системы возможныхограничений или связей на
параметры движения или
параметры управления,
определяющих область их
допустимых значений.
27.
6. Выбор и обоснование методачисленного интегрирования
уравнений движения или
аналитических представлений полета
на отдельных участках траектории,
величины шага интегрирования
на активном и пассивном участках
траектории и условий окончания
процесса моделирования.
28.
7. Обоснование необходимогоколичества численных
экспериментов для выявления
требуемых закономерностей
полета или получения решения
поставленной задачи.
29.
8. Проведение численныхэкспериментов и представление
их результатов в требуемой по
условиям задачи форме с
указанием границ или рамок их
возможного использования.
30.
В зависимости от конкретнойтехнической задачи, решаемой
путем моделирования полета,
содержание вышеуказанных этапов
может быть конкретизировано или
дополнено другими операциями.
31.
Полет и его характеристики32.
Полет – это движение материального тела,называемого ЛА, над поверхностью Земли в
атмосфере или за ее пределами в космическом
пространстве.
Полет является частным видом механического
движения, называемого перемещением
материального тела в пространстве и во
времени.
Для задания полета, его математического
описания и характеристики могут быть
использованы основные понятия и подходы
теоретической механики.
33.
Для полета реальный ЛА долженбыть представлен в виде
некоторого абстрактного
механического объекта
(материальная точка, система
материальных точек, твердое
тело и т. д.), к которому
применимы общие законы
механики.
34.
Такое представление ЛА называетсясхематизацией.
Будем исходить из того, что ракета или ее
БЧ могут быть представлены схемой
твердого тела.
В теоретической механике произвольное
перемещение твердого тела представляется
в виде совокупности поступательного
движения некоторого полюса и
вращательного движения тела
относительно этого полюса.
35.
В качестве полюса может бытьвыбрана произвольная точка тела.
Обычно в качестве полюса
принимают ЦМ тела.
В этом случае уравнения
движения имеют наиболее
простой вид.
36.
Поступательным движением твердоготела называют такое движение, при
котором любая прямая, проведенная в
этом теле, перемещается параллельно
самой себе.
При этом движении скорости и ускорения
всех точек тела для любого момента
времени равны между собой.
Поэтому движение ЛА может быть
полностью определено движением одной
точки, например, движением ЦМ.
37.
Вращательным движением твердоготела называется движение, при
котором какие-либо две точки тела
остаются неподвижными в каждый
текущий момент времени,
т. е. происходит вращение тела
вокруг некоторой мгновенной оси.
38.
Физические величины, характеризующиеположение и ориентацию ЛА в
пространстве и их изменение во времени,
называют параметрами движения.
Как правило, к ним относят линейные и
угловые координаты, составляющие
векторов линейных и угловых скоростей и
ускорений ЛА в той или иной системе
координат.
39.
При этом величины,характеризующие движение
центра масс ЛА, называют
параметрами поступательного
движения, а величины,
характеризующие движение ЛА
вокруг ЦМ - параметрами
вращательного движения.
40.
В общем случае параметрыдвижения отражают его различные
стороны и в соответствии с этим
подразделяются на
геометрические, кинематические
и динамические.
41.
Под геометрическими параметрамипонимают параметры движения,
характеризующие геометрические
свойства полета и определяющие
составляющие вектора положения r t ЛА в
некоторой системе координат.
Это параметры ориентации ЛА (углы
Эйлера, направляющие косинусы и т. д.) в
заданный момент времени.
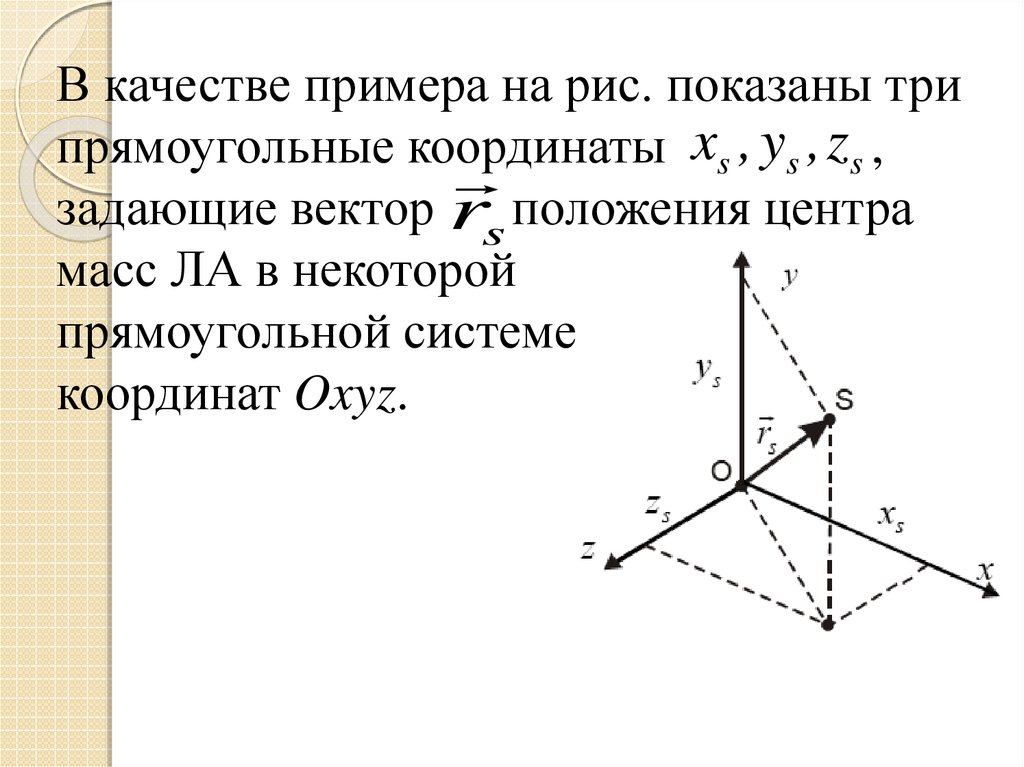
42.
В качестве примера на рис. показаны трипрямоугольные координаты xs , ys , zs ,
задающие вектор rs положения центра
масс ЛА в некоторой
прямоугольной системе
координат Oxyz.
43.
Кинематические параметрыдвижения характеризуют
кинематические свойства полета ЛА
без учета его массовоинерционных характеристик и
действующих на ЛА сил и
определяют компоненты векторов
линейной и угловой скоростей ЛА в
различных системах координат.
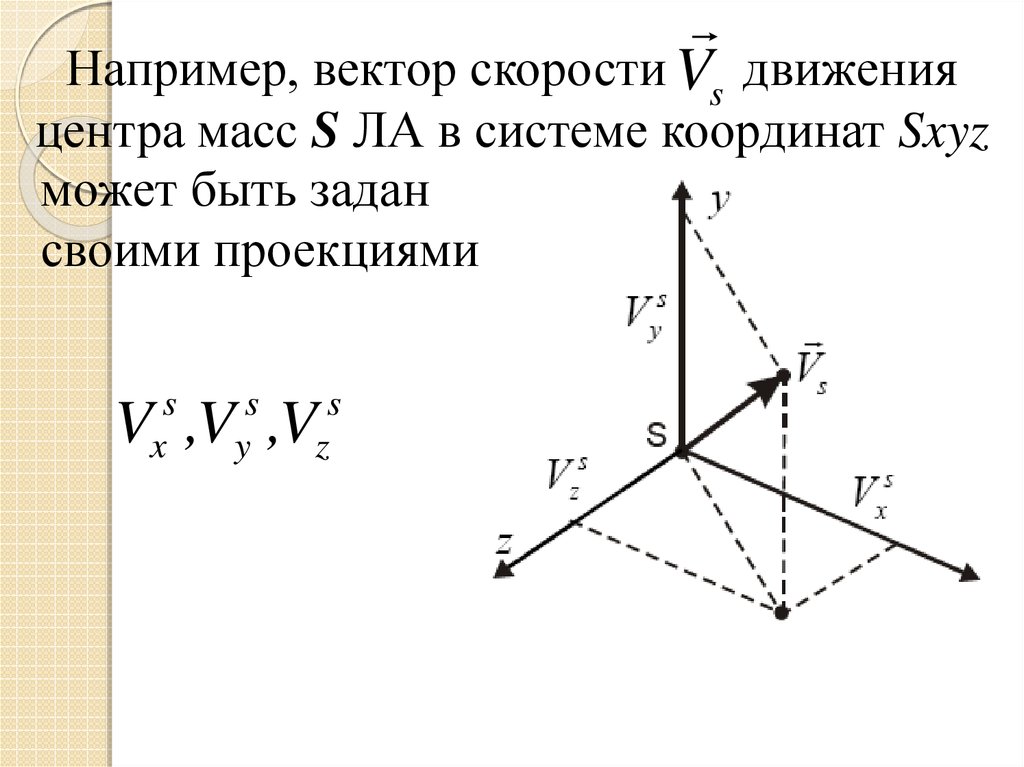
44.
Например, вектор скорости Vs движенияцентра масс S ЛА в системе координат Sxyz
может быть задан
своими проекциями
s
x
s
y
s
z
V ,V ,V
45.
Динамические параметры движенияотражают динамические свойства
полета, обусловленные
действующими на ЛА силами и
моментами и его массовоинерционными характеристиками, и
определяют компоненты векторов
линейного и углового ускорений ЛА.
46.
Геометрические параметрыдвижения являются
интегральными по отношению к
кинематическим параметрам.
Кинематические параметры
являются интегральными по
отношению к динамическим
параметрам.
47.
Все они связаны между собойдифференциальными
зависимостями
где - вектор параметров
угловой ориентации
ЛА в пространстве;
- вектор угловой скорости
ЛА; a , - векторы линейного и углового
ускорений.
48.
При математическом описании ианализе полета используется большое
число различных параметров
движения, задаваемых в различных СК.
Однако число независимых параметров
в каждой из названных групп
определяется числом степеней свободы
ракеты.
49.
Под числом степеней свободыпонимают минимальное число
независимых параметров
(координат), однозначно
определяющих положение тела в
пространстве.
50.
Независимость параметров следует пониматьв том смысле, что ни один из них не может
быть выражен через другие.
Для материальной точки число степеней
свободы равно трем, так как ее положение в
пространстве можно однозначно задать с
помощью трех координат.
Абсолютно твердое тело имеет шесть
степеней свободы: три степени свободы
поступательного движения и три вращательного движения.
51.
Движение ЛА можно считатькинематически заданным, если
известен закон изменения параметров
движения во времени
r r t , t
(2)
52.
Однако в силу дифференциальнойзависимости между
геометрическими, кинематическими
и динамическими параметрами
движения установить этот закон
можно только через
дифференциальные уравнения,
которые называют уравнениями
движения.
53.
Уравнения движения являютсяосновной частью математической
модели движения.
Задача записи этих уравнений
представляет собой задачу
математического описания полета.
54.
Получающаяся в результате системаобыкновенных дифференциальных уравнений
движения, приведенная к нормальной форме,
обычно записывается в следующем
стандартном функциональном виде:
q 1 f1 q1 ,..., qn ,t
где
n - порядок системы
q 2 f 2 q1 ,..., qn ,t
(3) уравнении, равный
..................
удвоенному числу степеней
q n f n q1 ,..., qn ,t
свободы ЛА;
t - время, являющееся независимой переменной;
q1 ,...,qn - неизвестные переменные, зависимые от
времени; q 1 ,..., q n - первые производные по времени от
соответствующих переменных.
55.
Зависимые переменные q1 ,...,qnпредставляют собой линейные и угловые
координаты и составляющие векторов
линейной и угловой скоростей ЛА, т.е.
совокупность геометрических и
кинематических параметров движения.
Они полностью определяют положение
ЛА и его скорость в текущий момент
времени, поэтому их также называют
параметрами состояния, или фазовыми
координатами.
56.
Соответствующая числустепеней свободы совокупность
независимых параметров
состояния образует
пространство состояний или
фазовое пространство.
57.
Пространство состояний являетсяматематическим обобщением
общеизвестного трехмерного
физического пространства и
распространяет понятие
координаты точки в трехмерном
пространстве на более общее
понятие фазовой координаты
точки.
58.
Для конечномерных механических систем,движение которых описывается системой
уравнений вида (3), пространство
состояний представляется как n-мерное
координатное пространство, в котором все
величины q1 ,...,qn полностью равноправны
независимо от их физического смысла и
физической размерности.
59.
Подходы к математическомуописанию полета
60.
Математическое описание полета какчастного вида механического
движения основывается на общих
законах и теоремах теоретической
механики.
Для этой цели в общем случае могут
быть использованы подходы
механики Ньютона, механики
Лагранжа и механики Гамильтона.
61.
Подход механики Ньютона.
Этот подход называют еще силовым
подходом.
Он опирается на понятие силы и основные
теоремы динамики точки и твердого тела,
на основе которых записываются
исходные векторные уравнения движения
ЦМ и вокруг ЦМ.
62.
Подход очень нагляден, дает представлениео механизме воздействия каждой из сил на
движение ЛА, достаточно прост для
механических схем ЛА в виде
материальной точки или твердого тела, но
более сложен в случае составных
механических систем, Основная трудность
подхода заключается в переходе от
векторных уравнений к скалярным, т. е. в
проектировании исходных векторных
уравнений на оси выбранных СК.
63.
Подход применим как длясвободных систем, так и для систем
со связями.
В последнем случае связи
заменяются реакциями связей, т. е.
в число действующих сил
добавляются силы реакции связей.
64.
Подход механики Лагранжа.Этот подход называют энергетическим,
так как в его основе лежат понятие
энергии и дифференциальные уравнения
Лагранжа П рода.
Формализм Лагранжа позволяет получить
сразу скалярные уравнения, т. е. исключает
операцию проектирования векторных
уравнений.
65.
Сущность подхода заключается в записидифференциальных уравнений Лагранжа
II рода для обобщенных координат и
обобщенных скоростей в следующей
последовательности:
d T T
Qi ,
dt q i qi
i 1,..N
где
Т - кинетическая энергия; qi ,q - iобобщенные
координаты и обобщенные скорости; Qi - обобщенные
силы; N - число степеней свободы.
66.
Основные трудности этого подходасостоят в определении обобщенных
сил.
Подход удобен для записи уравнений
движения составных механических
систем.
67.
Подход механики Гамильтона.Этот подход основан на использовании
канонических уравнений Гамильтона для
обобщенных фазовых координатqi и
обобщенных импульсов pi :
dqi dH
;
dt
dpi
N
dpi
dH
dt
dqi
где H L pi qi - гамильтониан;
i 1
L T U - функция Лагранжа;
Т - кинетическая энергия системы;
U - потенциальная энергия системы.
68.
В итоге применения формализмаГамильтона получаются сразу
скалярные уравнения в
нормальной форме.
69.
Получаемая в результатеиспользования этих подходов
механики система скалярных
уравнений определяет
механическое движение самого
ЛА как механического объекта
без учета работы СУ.
70.
Для моделирования управляемогодвижения ЛА, снабженного СУ,
полученную систему уравнений
необходимо дополнить уравнениями
работы системы управления.
Система управления определяют
управляющие воздействия в виде
управляющих сил и моментов, с
помощью которых и осуществляется
управление полетом.
71.
Для записи уравнений работысистемы управления
используются методы теории
автоматического управления.