

































 industry
industrySimilar presentations:










Конструкции и принципы работы микромеханических приборов. Первичные преобразователи и исполнительные механизмы
1. КОНСТРУКЦИИ И ПРИНЦИПЫ РАБОТЫ МИКРОМЕХАНИЧЕСКИХ ПРИБОРОВ
12.
Первичные преобразователи и исполнительные механизмыДатчики давления в промышленности
Датчик давления (ДД) — устройство, физические параметры которого изменяются
в зависимости от давления измеряемой среды (жидкости, газы, пар). В датчиках
давление
измеряемой
среды
преобразуется
в
унифицированный
пневматический, электрический сигналы или цифровой код.
Составные части ДД
Первичный преобразователь давления, в составе которого чувствительный
элемент - приемник давления, схемы вторичной обработки сигнала, различных
по конструкции корпусных деталей, в том числе для герметичного соединения
датчика с объектом и защиты от внешних воздействий и устройства вывода
информационного сигнала.
Основные отличия одних приборов от других: пределы измерений, динамически1
и частотный диапазон, точность регистрации давления, допустимые условия
эксплуатации, массогабаритные характеристики, принцип преобразования
давления в электрический сигнал.
3.
Датчики давления в промышленностиЗадача ДД – измерять непрерывно меняющуюся величину и выдавать
сигнал в измерительную цепь. Для выбора оптимальной схемы построения
прибора, предназначенного для применения практически во всех
отраслях промышленности, вводятся критерии, по которым сравниваются
предполагаемые решения.
• Первый критерием - способ преобразования механической
величины в электрическую;
• Второй критерием – технологическое воспроизведение этого способа в
промышленных масштабах.
Т.о. основным элементом ДД является механоэлектрический
преобразователь, то есть устройство, преобразующее давление, в
электрический параметр: сопротивление, емкость, электрический
заряд и т.д.
механоэлектрический преобразователь – СЕНСОР, который имеет
чувствительный элемент (ЧЭ)
4.
Принципы реализации ДДСуществующие сегодня датчики
давления по принципу измерения
можно разделить на основные
группы:
1. – жидкостные датчики давления
прямого измерения;
2. – жидкостные датчики
дифференциального давления
прямого измерения;
3. – механические датчики давления
прямого измерения;
4. – механические датчики
дифференциального давления
прямого измерения;
5. – тензорезистивные датчики
давления косвенного измерения;
6. – тензорезистивные датчики
дифференциального давления
косвенного измерения;
7. – емкостно-частотные датчики
давления косвенного измерения;
8. – емкостно-частотные датчики
дифференциального давления
косвенного измерения;
9. – кремниево-резонансные
датчики давления косвенного
измерения;
10. – кремниево-резонансные
датчики дифференциального
давления косвенного измерения.
5.
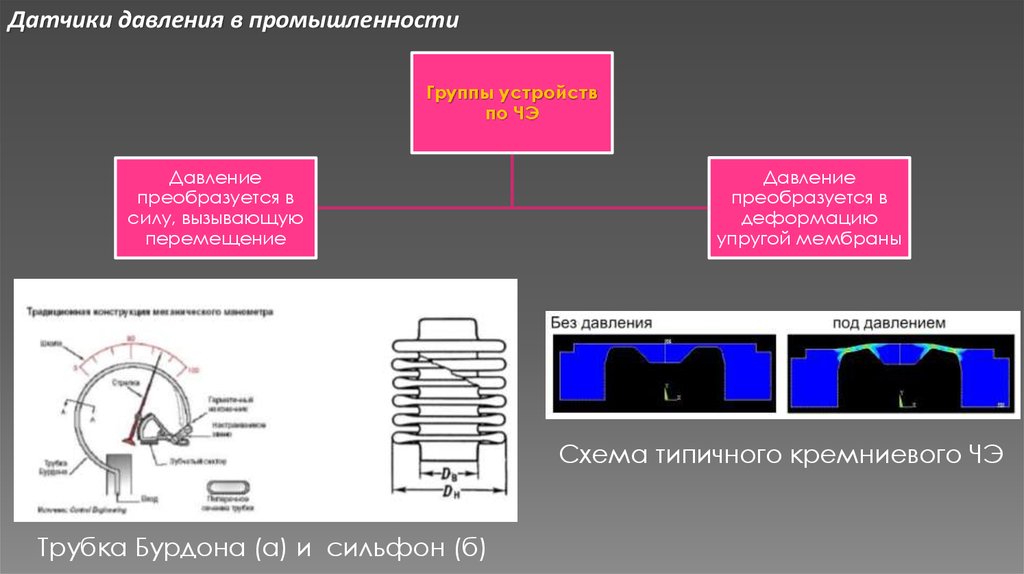
Датчики давления в промышленностиГруппы устройств
по ЧЭ
Давление
преобразуется в
силу, вызывающую
перемещение
Давление
преобразуется в
деформацию
упругой мембраны
Схема типичного кремниевого ЧЭ
Трубка Бурдона (а) и сильфон (б)
6.
Датчики давления в промышленностиТензометрический
метод
Принципы реализации
Чувствительные элементы датчиков базируются на принципе
изменения сопротивления при деформации
тензорезисторов, приклеенных к упругому элементу,
который деформируется под действием давления.
Пьезорезистивный
метод
Основан на интегральных чувствительных элементах из монокристаллического
кремния. Кремниевые преобразователи имеют высокую чувствительность
благодаря изменению удельного объемного сопротивления полупроводника
при деформировании давлением. Для измерения давления чистых
неагрессивных сред применяются, так называемые, Low cost — решения,
основанные на использовании чувствительных элементов либо без защиты, либо
с защитой силиконовым гелем. Для измерения агрессивных сред и большинства
промышленных применений используется преобразователь давления в
герметичном металло-стеклянном корпусе, с разделительной диафрагмой из
нержавеющей стали, передающей давление измеряемой среды посредством
кремнийорганической жидкости.
Ёмкостной метод
Ёмкостные преобразователи используют метод изменения ёмкости
конденсатора при изменении расстояния между обкладками. Известны
керамические или кремниевые ёмкостные первичные преобразователи
давления и преобразователи, выполненные с использованием упругой
металлической мембраны. При изменении давления мембрана с
электродом деформируется и происходит изменение емкости. В элементе
из керамики или кремния пространство между обкладками обычно
заполнено маслом или другой органической жидкостью. Недостаток —
нелинейная зависимость емкости от приложенного давления.
7.
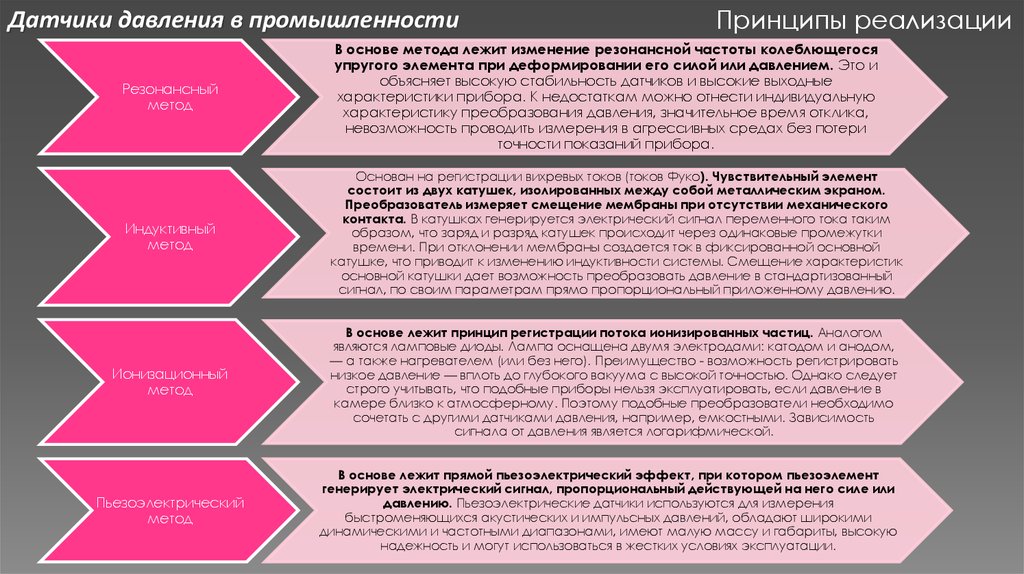
Датчики давления в промышленностиПринципы реализации
Резонансный
метод
В основе метода лежит изменение резонансной частоты колеблющегося
упругого элемента при деформировании его силой или давлением. Это и
объясняет высокую стабильность датчиков и высокие выходные
характеристики прибора. К недостаткам можно отнести индивидуальную
характеристику преобразования давления, значительное время отклика,
невозможность проводить измерения в агрессивных средах без потери
точности показаний прибора.
Индуктивный
метод
Основан на регистрации вихревых токов (токов Фуко). Чувствительный элемент
состоит из двух катушек, изолированных между собой металлическим экраном.
Преобразователь измеряет смещение мембраны при отсутствии механического
контакта. В катушках генерируется электрический сигнал переменного тока таким
образом, что заряд и разряд катушек происходит через одинаковые промежутки
времени. При отклонении мембраны создается ток в фиксированной основной
катушке, что приводит к изменению индуктивности системы. Смещение характеристик
основной катушки дает возможность преобразовать давление в стандартизованный
сигнал, по своим параметрам прямо пропорциональный приложенному давлению.
Ионизационный
метод
В основе лежит принцип регистрации потока ионизированных частиц. Аналогом
являются ламповые диоды. Лампа оснащена двумя электродами: катодом и анодом,
— а также нагревателем (или без него). Преимущество - возможность регистрировать
низкое давление — вплоть до глубокого вакуума с высокой точностью. Однако следует
строго учитывать, что подобные приборы нельзя эксплуатировать, если давление в
камере близко к атмосферному. Поэтому подобные преобразователи необходимо
сочетать с другими датчиками давления, например, емкостными. Зависимость
сигнала от давления является логарифмической.
Пьезоэлектрический
метод
В основе лежит прямой пьезоэлектрический эффект, при котором пьезоэлемент
генерирует электрический сигнал, пропорциональный действующей на него силе или
давлению. Пьезоэлектрические датчики используются для измерения
быстроменяющихся акустических и импульсных давлений, обладают широкими
динамическими и частотными диапазонами, имеют малую массу и габариты, высокую
надежность и могут использоваться в жестких условиях эксплуатации.
8.
Круг применений датчиков давления• общепромышленные;
• датчики для ЖКХ;
• автомобильные;
• медицинские;
• специального назначения (для
пищевой, химической, нефтяной или
газовой промышленности, для
применения на судах);
• OEM.
9.
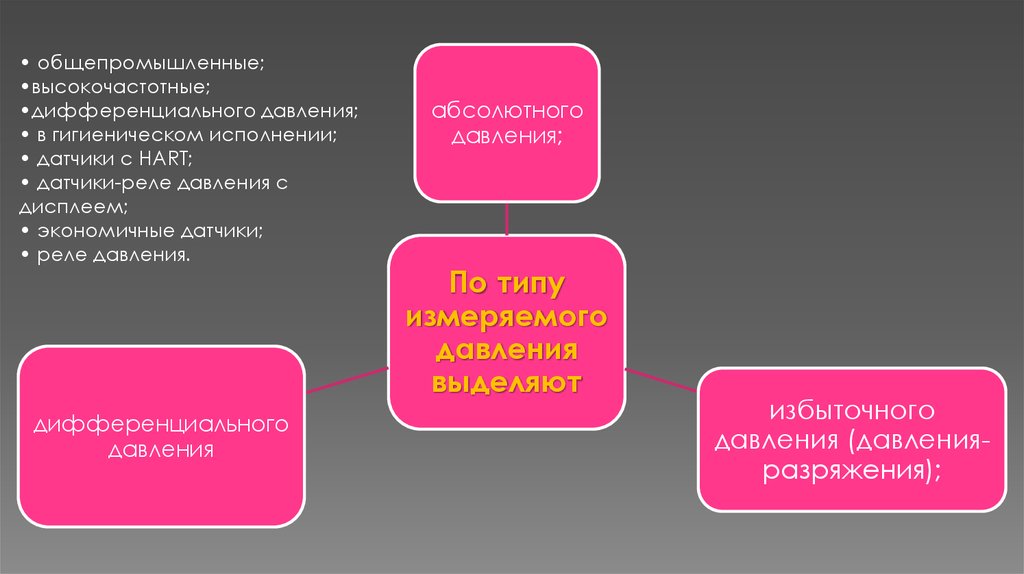
• общепромышленные;•высокочастотные;
•дифференциального давления;
• в гигиеническом исполнении;
• датчики с HART;
• датчики-реле давления с
дисплеем;
• экономичные датчики;
• реле давления.
дифференциального
давления
абсолютного
давления;
По типу
измеряемого
давления
выделяют
избыточного
давления (давленияразряжения);
10.
Датчики абсолютного и избыточного давленияДатчики абсолютного давления предназначены для измерения величины
абсолютного давления жидких и газообразных сред. Опорное давление - вакуум.
Воздух из внутренней полости чувствительного элемента датчика откачан.
Барометр - частный случай датчика абсолютного давления.
Датчики избыточного давления предназначены для измерения величины
избыточного давления жидких и газообразных сред. Опорное давление
атмосферное; таким образом, одна сторона мембраны соединена с
атмосферой.
Датчики избыточного давления-разряжения представляют собой сочетание
датчиков избыточного и вакуумметрического давлений, т.е. измеряют как давление,
так и разрежение.
Датчики дифференциального (разности, перепада) давления предназначены для
измерения разности давления среды и используются для измерения расхода
жидкостей, газа, пара, уровня жидкости. Давление подается на обе стороны
мембраны, а выходной сигнал зависит от разности давлений.
11.
Описание и характеристики некоторых типовдатчиков абсолютного и избыточного давления
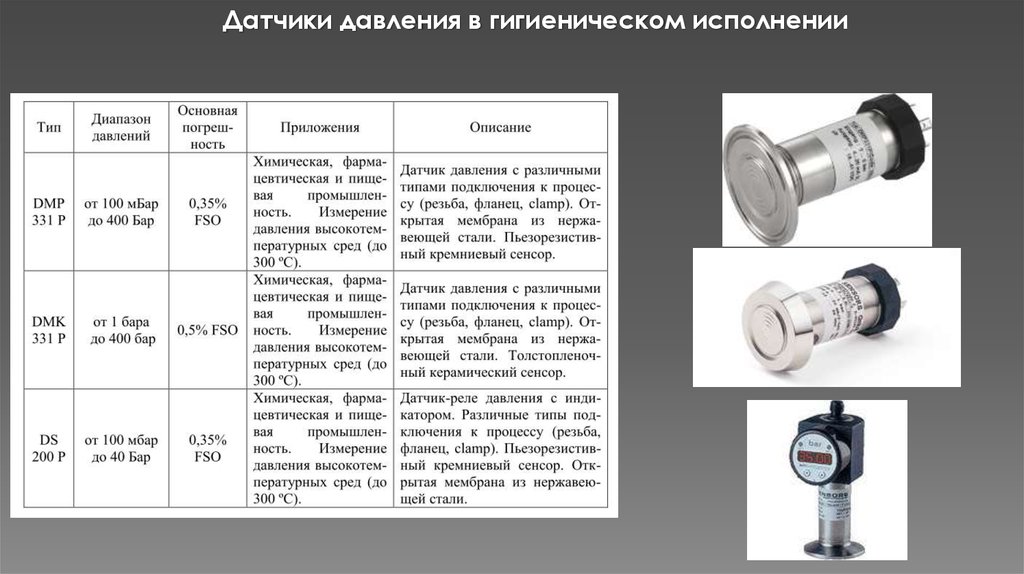
Датчики давления имеют различные
метрологические характеристики
(классы точности) - обычно от 0,05% до 0,5%.
Особо точные датчики используются на
важных объектах в различных отраслях
промышленности.
12.
Описание и характеристики некоторых типовдатчиков дифференциального давления
13.
Датчики давления в гигиеническом исполнении14.
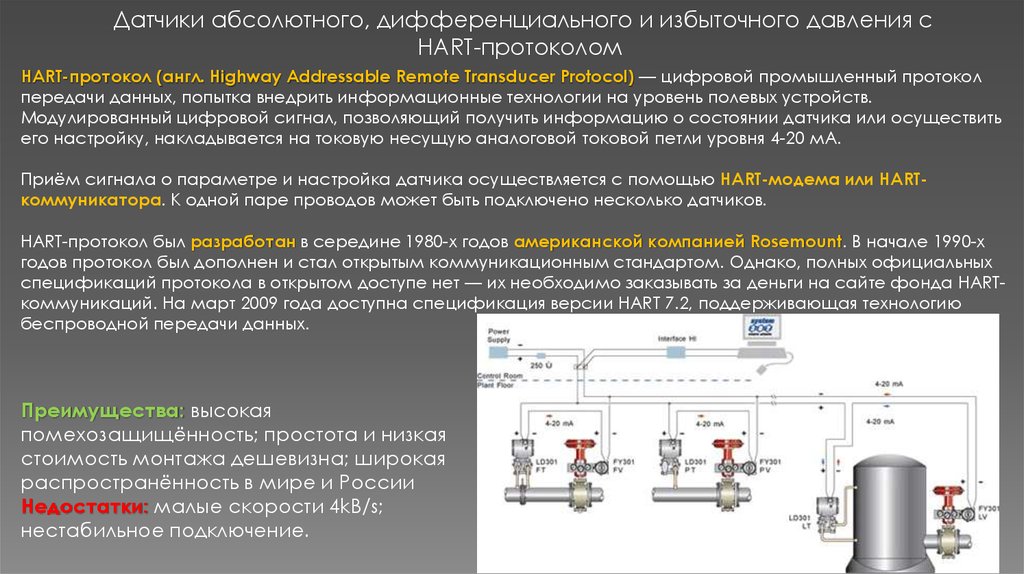
Датчики абсолютного, дифференциального и избыточного давления сHART-протоколом
HART-протокол (англ. Highway Addressable Remote Transducer Protocol) — цифровой промышленный протокол
передачи данных, попытка внедрить информационные технологии на уровень полевых устройств.
Модулированный цифровой сигнал, позволяющий получить информацию о состоянии датчика или осуществить
его настройку, накладывается на токовую несущую аналоговой токовой петли уровня 4-20 мА.
Приём сигнала о параметре и настройка датчика осуществляется с помощью HART-модема или HARTкоммуникатора. К одной паре проводов может быть подключено несколько датчиков.
HART-протокол был разработан в середине 1980-х годов американской компанией Rosemount. В начале 1990-х
годов протокол был дополнен и стал открытым коммуникационным стандартом. Однако, полных официальных
спецификаций протокола в открытом доступе нет — их необходимо заказывать за деньги на сайте фонда HARTкоммуникаций. На март 2009 года доступна спецификация версии HART 7.2, поддерживающая технологию
беспроводной передачи данных.
Преимущества: высокая
помехозащищённость; простота и низкая
стоимость монтажа дешевизна; широкая
распространённость в мире и России
Недостатки: малые скорости 4kB/s;
нестабильное подключение.
15.
Датчики давления с HART-протоколомДатчики-реле давления с дисплеем
Электронные реле давления
16.
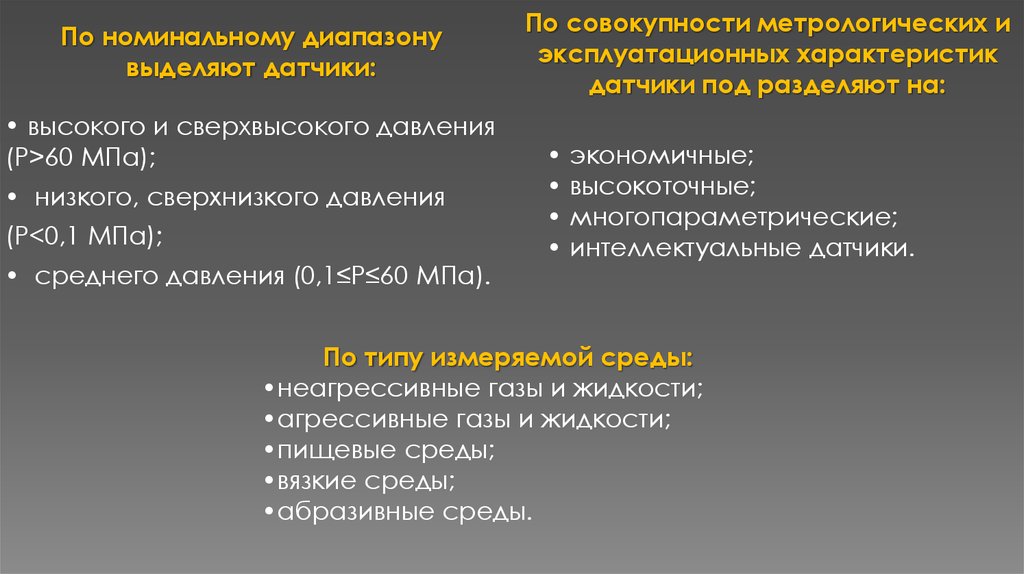
По номинальному диапазонувыделяют датчики:
• высокого и сверхвысокого давления
(P>60 МПа);
• низкого, сверхнизкого давления
(P<0,1 МПа);
• среднего давления (0,1≤P≤60 МПа).
По совокупности метрологических и
эксплуатационных характеристик
датчики под разделяют на:
• экономичные;
• высокоточные;
• многопараметрические;
• интеллектуальные датчики.
По типу измеряемой среды:
•неагрессивные газы и жидкости;
•агрессивные газы и жидкости;
•пищевые среды;
•вязкие среды;
•абразивные среды.
17.
Метрологические характеристики датчиков давления1. Диапазон измерения
2. Предел основной приведенной погрешности (ОПП) – это относительная
погрешность средств измерения, выраженная абсолютной
погрешностью средства измерения к условно принятому значению
величины, постоянному во всем диапазоне измерений.
3. Пределы дополнительных погрешностей, таких как влияние температуры,
статического давления, односторонней перегрузки и т. п.
4. Стабильность (предел изменения метрологических характеристик за
установленный период времени).
5. Предел основной погрешности в основном диапазоне перенастройки
шкалы нормируется, как правило, в% шкалы. Способы выражения
остальных метрологических характеристик определяются изготовителем
прибора.
18.
Единицы измерения давленияПаскаль
(Pa, Па)
Бар
(bar, бар)
Техническая
атмосфера
(at, ат)
Физическая
атмосфера
(atm, атм)
Миллиметр
ртутного
столба
(мм рт. ст.,
mm Hg, Torr,
торр)
1 Па
1 Н/м2
10−5
10,197·10−6
9,8692·10−6
7,5006·10−3
1,0197·10−4
145,04·10−6
1 бар
105
1·106 дин/см2
1,0197
0,98692
750,06
10,197
14,504
1 ат
98066,5
0,980665
1 кгс/см2
0,96784
735,56
10
14,223
1 атм
101325
1,01325
1,033
1 атм
760
10,33
14,696
1 мм рт. ст.
133,322
1,3332·10−3
1,3595·10−3
1,3158·10−3
1 мм рт. ст.
13,595·10−3
19,337·10−3
1 м вод. ст.
9806,65
9,80665·10−2
0,1
0,096784
73,556
1 м вод. ст.
1,4223
1 psi
6894,76
68,948·10−3
70,307·10−3
68,046·10−3
51,715
0,70307
1 lbf/in2
Метр водяного
столба
(м вод. ст.,
m H2O)
Фунт-сила
на кв. дюйм
(psi)
19.
По наличию схемы обработки сигналавыделяют датчики:
• с ненормированным выходным
сигналом;
• с нормированным выходным сигналом;
•с пассивной температурной
компенсацией;
•активной температурной
компенсацией;
•с микропроцессорной обработкой
сигнала.
По типу механического присоединения
также различают датчики:
•с резьбовыми присоединениями;
•с фланцевыми присоединениями;
• с гигиеническими присоединениями;
•погружные.
По типу выходного сигнала датчики подразделяются на датчики:
• с аналоговым выходным сигналом;
•с цифровым выходным сигналом;
•с релейным выходным сигналом.
20.
Выбор датчика давления• определение назначения, типа и диапазона
измеряемого давления (абсолютное, избыточное
или дифференциальное, рабочее и
максимальное воздействующее давление,
статические или динамические давления, срок
службы);
• анализ метрологических характеристик, учет
влияния окружающих условий (перепадов
температуры, вибрации, ударов, влажности,
электромагнитных помех, электростатического
разрушения, помех по цепям питания, выхода, КЗ);
• анализ требований к электрическому
интерфейсу (аналоговый или цифровой выходной
сигнал);
• учет требований для механической установки
(инсталляции);
• учет стоимости;
• оптимальный выбор датчика.
Рекомендуется выбрать
несколько известных
производителей и сравнить
датчики с аналогичной
спецификацией,
предлагаемые
для данного применения.
21.
Регистрация сигналов датчиков давленияСигналы с датчиков давления могут быть как медленноменяющимися,
так и быстропеременные. В первом случае их спектр лежит в области
низких частот. Для того, чтобы с высокой точностью оцифровать такой
сигнал необходимо подавить высокочастотную часть спектра,
полностью состоящую из помех. Это особенно актуально в
промышленных условиях.
Специально для ввода медленноменяющихся сигналов используются
интегрирующие АЦП. Они проводят измерение не мгновенного
значения сигнала (которое изменяется под действием помех), а
интегрируют сигнальную функцию за заданный промежуток времени,
который заведомо меньше постоянной времени процессов,
происходящих в контролируемой среде, но заведомо больше
периода самой низкочастотной помехи. Интегрирующие АЦП
выпускают многие зарубежные фирмы (Texas Instruments, Analog
Devices и др).
22.
Датчики статического и динамического давленияДатчики
статического
давления
часто
используют
технологии
тензодатчиков,
пьезорезистивных или емкостных датчиков. Такие приборы способны измерять статические
или медленно изменяемые давления и идеально подходят для мониторинга различных
процессов.
Большинство датчиков статического давления имеют ограниченную чувствительность
около 1000 Гц и соответствующее время нарастания импульса около 1 мс.
Датчики динамического давления характеризуются способностью быстрого отклика – в
течение микросекунд; они могут реагировать на частоты свыше 100 кГц. Очень часто они
используют технологии пьезоэлектрического кварца, хотя другие пьезоэлектрические
кристаллы также могут использоваться в зависимости от применения.
В пьезоэлектрических датчиках давления нет движущихся частей, они прочны, имеют
линейные характеристики, долговечны и обладают хорошей воспроизводимостью
результатов. Они могут противостоять высоким статическим нагрузкам, однако с высокой
точностью реагируют на небольшие колебания давления.
23.
24.
25.
26.
27.
кремниевые датчики температурыОсновная масса датчиков давления в
нашей стране выпускаются на основе
чувствительных элементов, принципом
которых является измерение
деформации тензорезисторов,
сформированных в эпитаксиальной
пленке кремния на подложке из сапфира
(КНС), припаянной твердым припоем к
титановой мембране. Иногда вместо
кремниевых тензорезисторов используют
металлические: медные, никелевые,
железные и др.
Практически все производители датчиков в
России проявляют интерес к
использованию интегральных
чувствительных элементов на основе
монокристаллического кремния. Это
обусловлено тем, что кремниевые
преобразователи имеют на порядок
большую временную и температурную
стабильности по сравнению с приборами
на основе КНС структур
28.
29.
30.
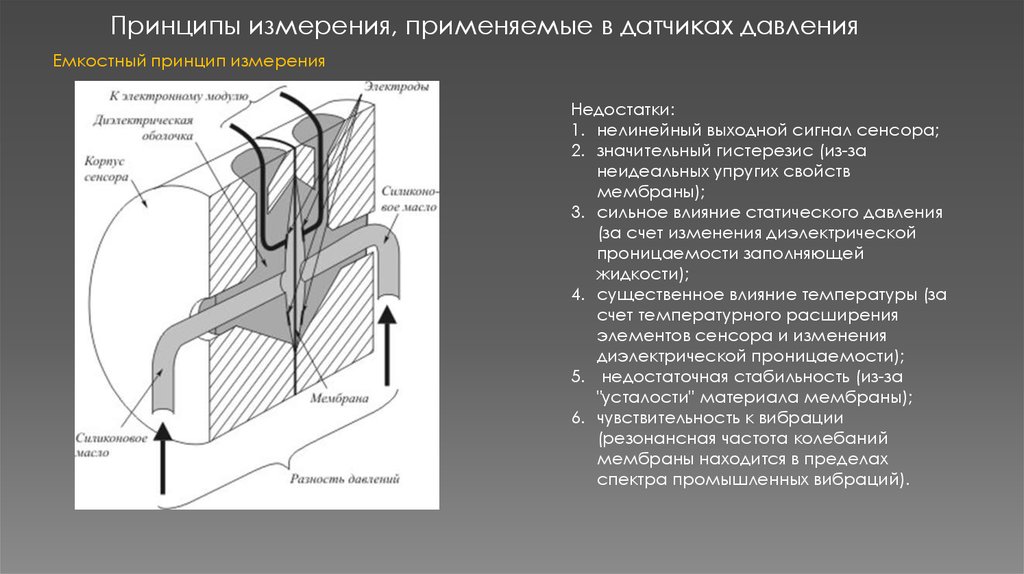
Принципы измерения, применяемые в датчиках давленияЕмкостный принцип измерения
Недостатки:
1. нелинейный выходной сигнал сенсора;
2. значительный гистерезис (из-за
неидеальных упругих свойств
мембраны);
3. сильное влияние статического давления
(за счет изменения диэлектрической
проницаемости заполняющей
жидкости);
4. существенное влияние температуры (за
счет температурного расширения
элементов сенсора и изменения
диэлектрической проницаемости);
5. недостаточная стабильность (из-за
"усталости" материала мембраны);
6. чувствительность к вибрации
(резонансная частота колебаний
мембраны находится в пределах
спектра промышленных вибраций).
31.
Тензо- и пьезорезистивный принцип измеренияДостоинствами тензорезистивного принципа измерения давления являются
сравнительная простота в изготовлении, невысокая стоимость и потенциально
широкий диапазон рабочих температур.
К недостаткам тензорезистивных сенсоров можно отнести:
1.
низкую чувствительность (в пределах 1%);
2.
значительные гистерезисные явления и нестабильность (из-за неоднородности
конструкции и "усталости" металла мембраны);
3.
сильное влияние температуры (за счет различия коэффициентов
температурного расширения элементов сенсора и изменения
электропроводности кремния);
4.
сильное влияние статического давления (из-за различия упругих свойств
элементов конструкции);
5.
наличие нелинейности.
Достоинствами пьезорезистивных сенсоров являются малый
гистерезис, стойкость к вибрации и однородность упругой
мембраны.
Недостатки в основном те же, что у тензорезистивных, но
выражены в меньшей степени:
1. низкая чувствительность (2...5%);
2. сильное влияние температуры (за счет изменения
удельного сопротивления пьезорезисторов);
3. существенное влияние статического давления;
4. недостаточная стабильность (фактором дрейфа является
загрязненность примесями);
5. наличие нелинейности.
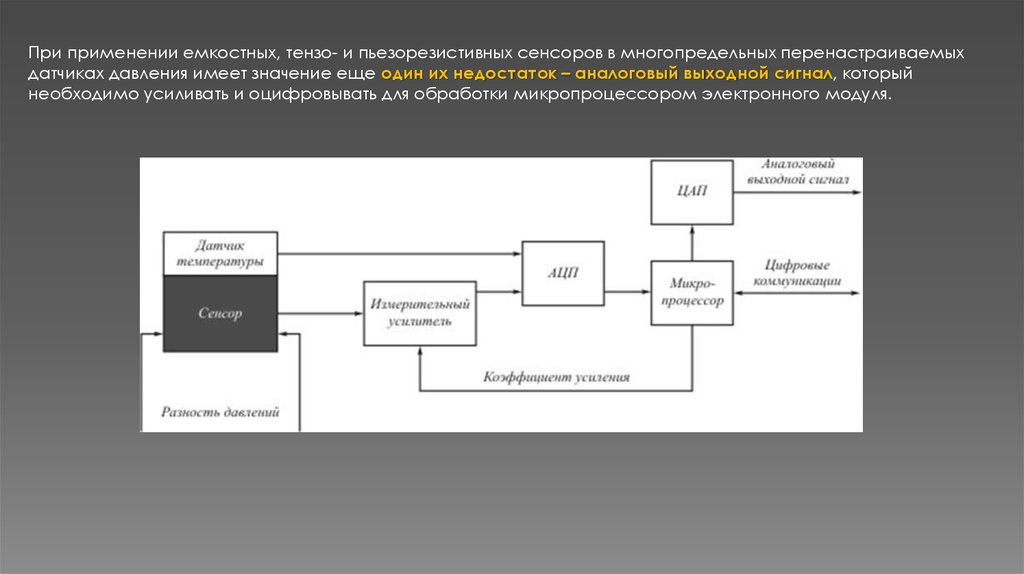
32.
При применении емкостных, тензо- и пьезорезистивных сенсоров в многопредельных перенастраиваемыхдатчиках давления имеет значение еще один их недостаток – аналоговый выходной сигнал, который
необходимо усиливать и оцифровывать для обработки микропроцессором электронного модуля.
33.
Резонансный принцип измерения давленияРезонансный принцип измерения давления основан на преобразовании резонатора деформации в частоту колебаний.
Дифференциально-резонансный принцип
измерения и конструкция кремниевого
резонансного сенсора обладают целым
рядом очень важных преимуществ и
обеспечивают разработчикам практически
неограниченные возможности для
совершенствования датчиков давления.
1. Отсутствие гистерезиса
2. Практически отсутствует нелинейность
3. Собственные частоты резонаторов
(порядка 90 кГц) лежат далеко за
пределами спектра промышленных
шумов (иммунитет к вибрации)
4. самокомпенсацию сенсора
относительно влияния температуры
(<0,001%/°C) и статического давления
5. отсутствуют факторы дрейфа,
поскольку монокристаллический
кремний химически инертен и не
подвержен "усталости«
6. частотный выходной сигнал с сенсора
не требует аналого-цифрового
преобразования
34.
Подключение датчиков1. Место установки датчика
2. Подключение датчика к магистрали с
измеряемой средой
3. Электрическое подключение датчика
4. Отказы датчиков
Подготовка посадочного места
Монтаж датчика
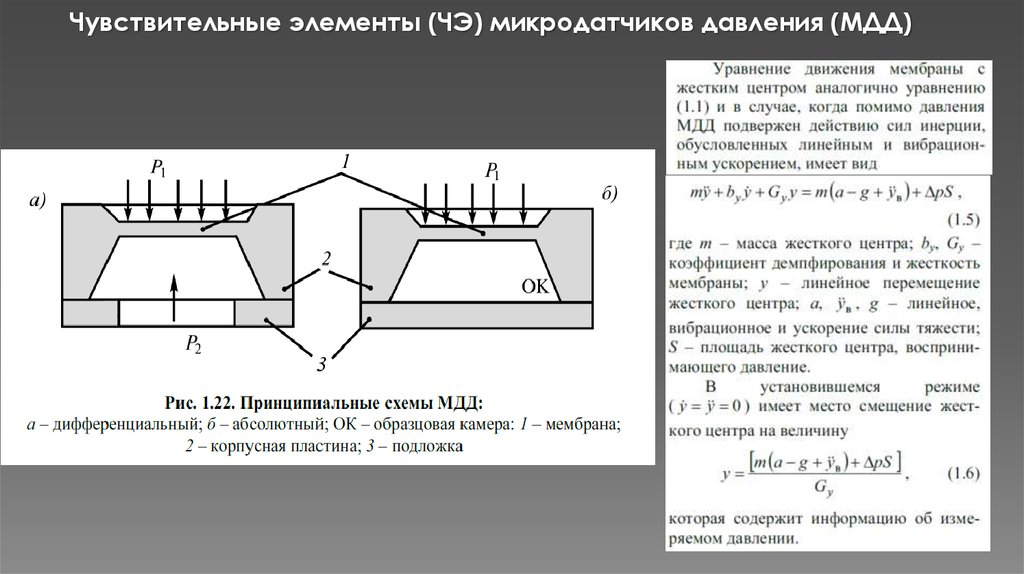
35.
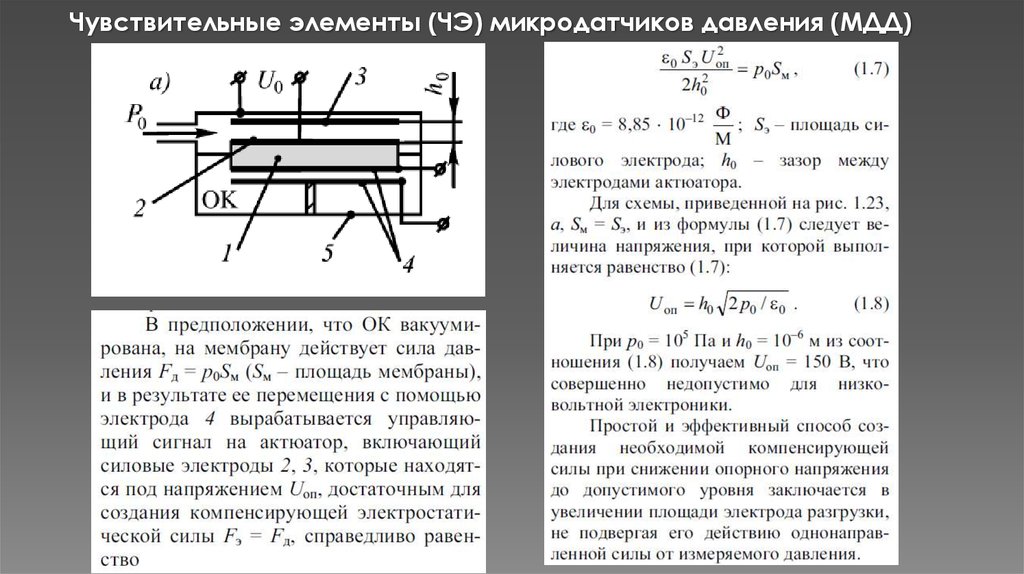
Чувствительные элементы (ЧЭ) микродатчиков давления (МДД)ЧЭ
микромеханических
датчиков давления
(МДД) является
мембрана с
тензорезисторными
или иными ПП либо с
емкостными (или
другими)
преобразователями
перемещений
мембраны.
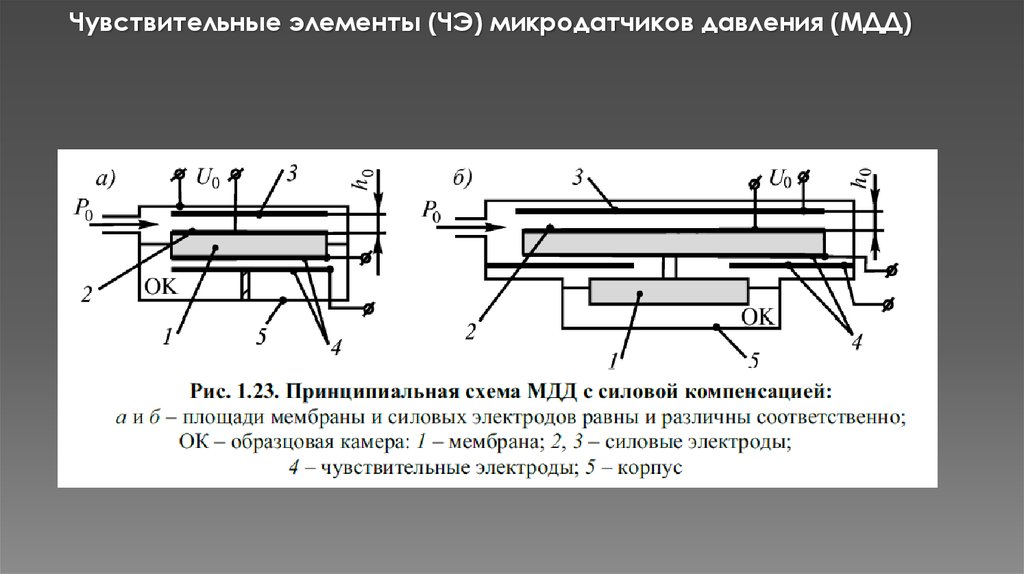
36.
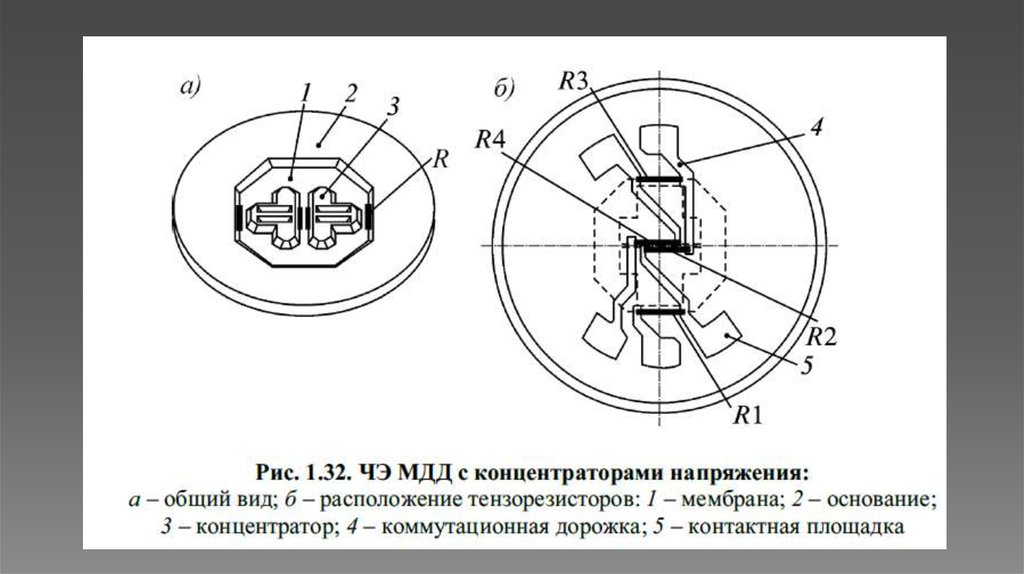
Чувствительные элементы (ЧЭ) микродатчиков давления (МДД)37.
Чувствительные элементы (ЧЭ) микродатчиков давления (МДД)38.
Чувствительные элементы (ЧЭ) микродатчиков давления (МДД)39.
Чувствительные элементы (ЧЭ) микродатчиков давления (МДД)40.
Чувствительные элементы (ЧЭ) микродатчиков давления (МДД)41.
Базовые конструкции микродатчиков давления42.
Базовые конструкции микродатчиков давления"НПК "Технологический центр« (г. Москва, Зеленоград)
43.
44.
Базовые конструкции микродатчиков давления"НПК "Технологический центр« (г. Москва, Зеленоград)
45.
Базовые конструкции микродатчиков давления"НПК "Технологический
центр« (г. Москва,
Зеленоград)
Motorola (США)
Endevco (CША)
46.
47.
Базовые конструкции микродатчиков давленияРазработка Мичиганского университета, США
48.
Спасибо завнимание !!!