



















 electronics
electronicsSimilar presentations:
. Общие сведения. (Лекция 6)")

")

")





Машины переменного тока. Синхронные машины (СМ). Реактивный синхронный двигатель (РСД)
1.
Машины переменного тока ч.2 (продолж.)Синхронные машины (СМ) (продолж.).
Реактивный синхронный двигатель(РСД)
Вывод формулы для момента.
Реактивный момент СМ
Особенности конструкции РСД
Принцип работы РСД
Достоинства РСД
Выводы по теме РСД
Гистерезисные двигатели(ГД)
Области применения ГД
Особенности конструкции ГД
Образование момента в ГД
Достоинства и недостатки ГД
2.
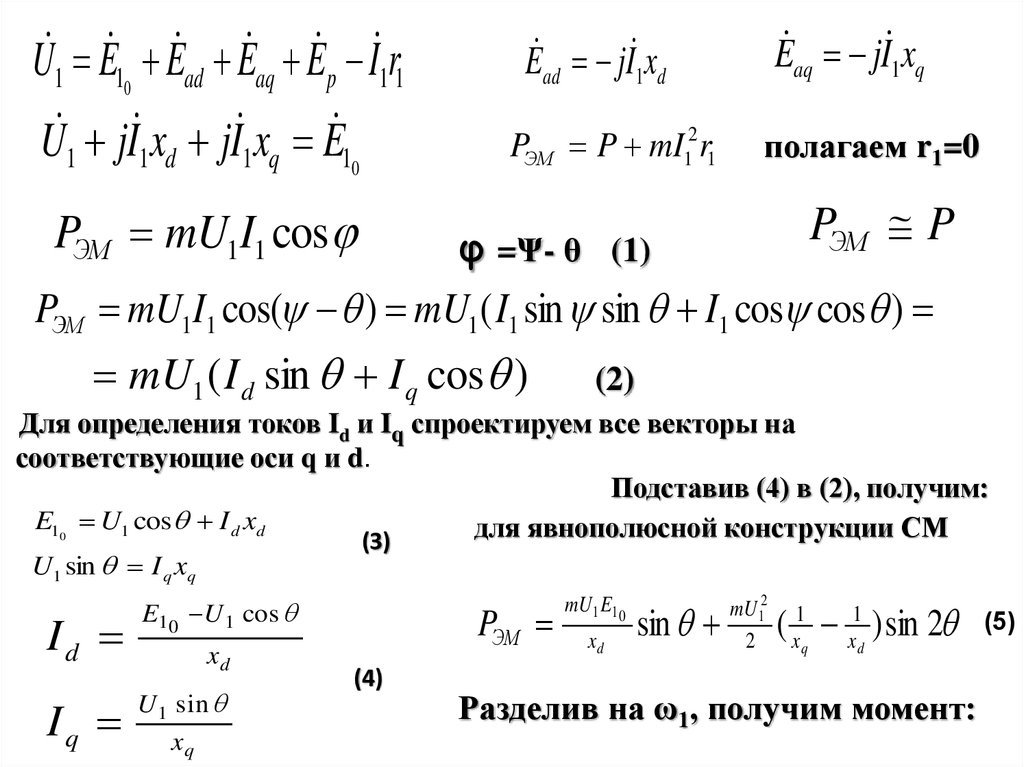
Вывод формулы для момента явнополюсной СМφ = Ψ- θ
3.
U 1 E 10 E ad E aq E p I 1r1U jI x jI x E
1
1 d
1 q
10
E aq jI 1xq
E ad jI 1xd
PЭМ P mI12 r1
полагаем r1=0
PЭМ P
PЭМ mU1I1 cos
φ =Ψ- θ (1)
PЭМ mU1I1 cos( ) mU1 ( I1 sin sin I1 cos cos )
mU1 ( I d sin I q cos ) (2)
Для определения токов Id и Iq спроектируем все векторы на
соответствующие оси q и d.
Подставив (4) в (2), получим:
E1 U1 cos I d xd
для явнополюсной конструкции СМ
(3)
U1 sin I q xq
0
Id
Iq
E1 0 U 1 cos
xd
U 1 sin
xq
PЭМ
(4)
mU1 E10
xd
sin
mU12
2
( x1q x1d ) sin 2
Разделив на ω1, получим момент:
(5)
4.
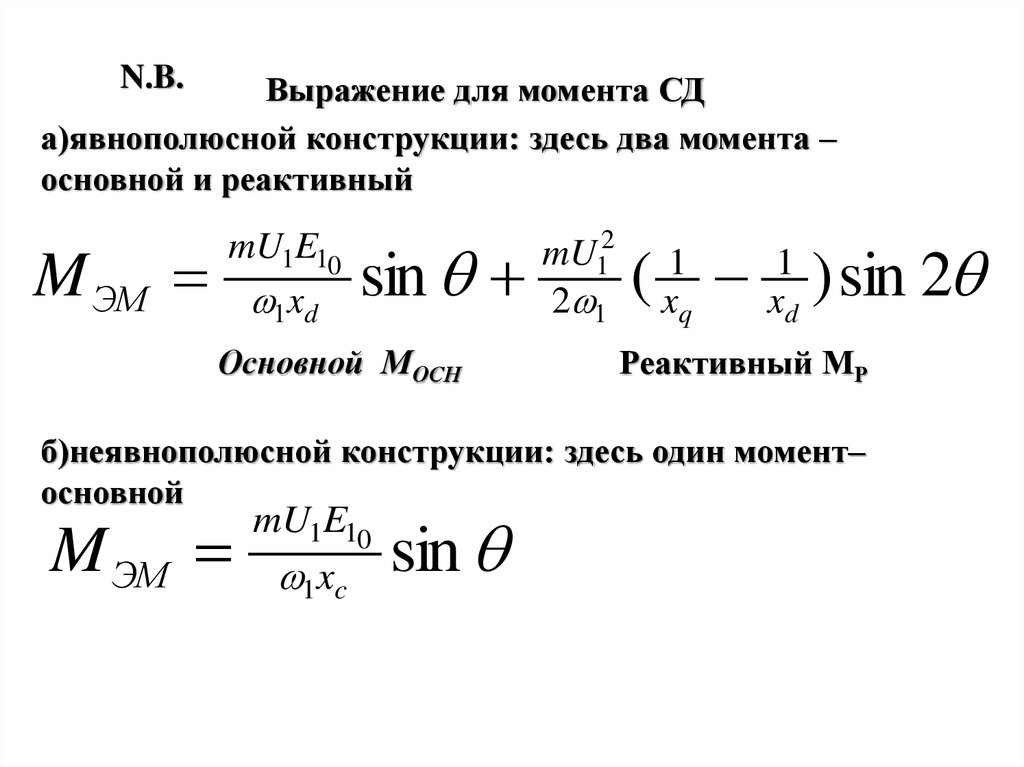
N.B.Выражение для момента СД
а)явнополюсной конструкции: здесь два момента –
основной и реактивный
M ЭМ
mU1E10
1xd
sin
Основной МОСН
mU12
2 1
( ) sin 2
1
xq
1
xd
Реактивный МР
б)неявнополюсной конструкции: здесь один момент–
основной
M ЭМ
mU1E10
1xc
sin
5.
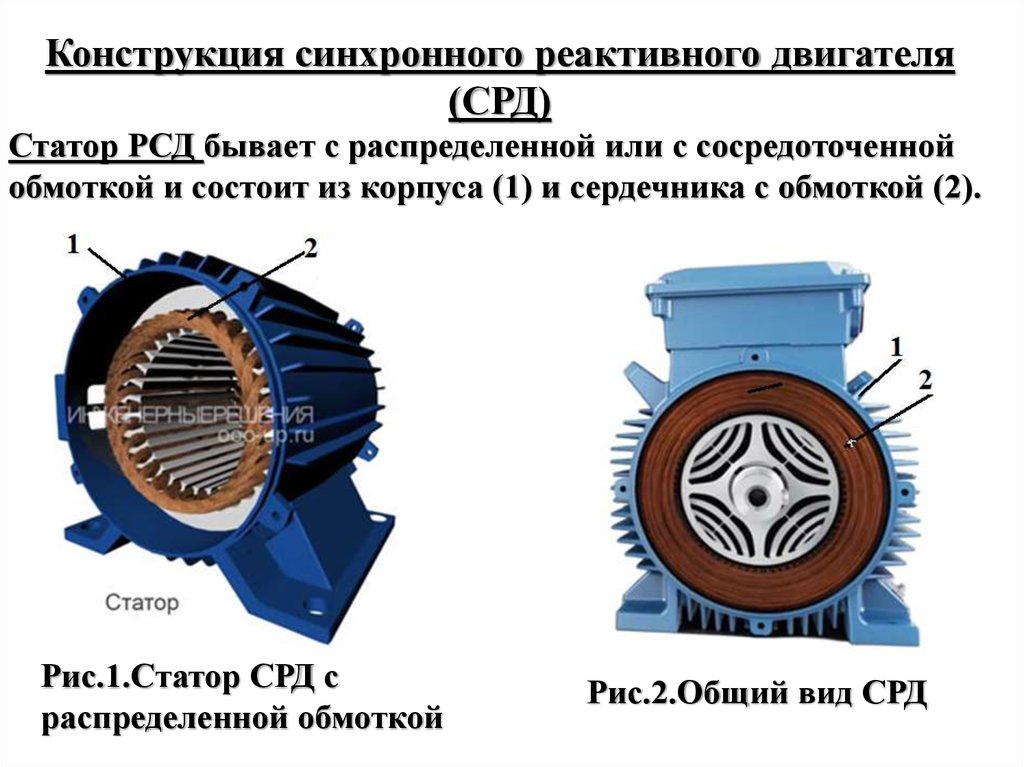
Конструкция синхронного реактивного двигателя(СРД)
Статор РСД бывает с распределенной или с сосредоточенной
обмоткой и состоит из корпуса (1) и сердечника с обмоткой (2).
Рис.1.Статор СРД с
распределенной обмоткой
Рис.2.Общий вид СРД
6.
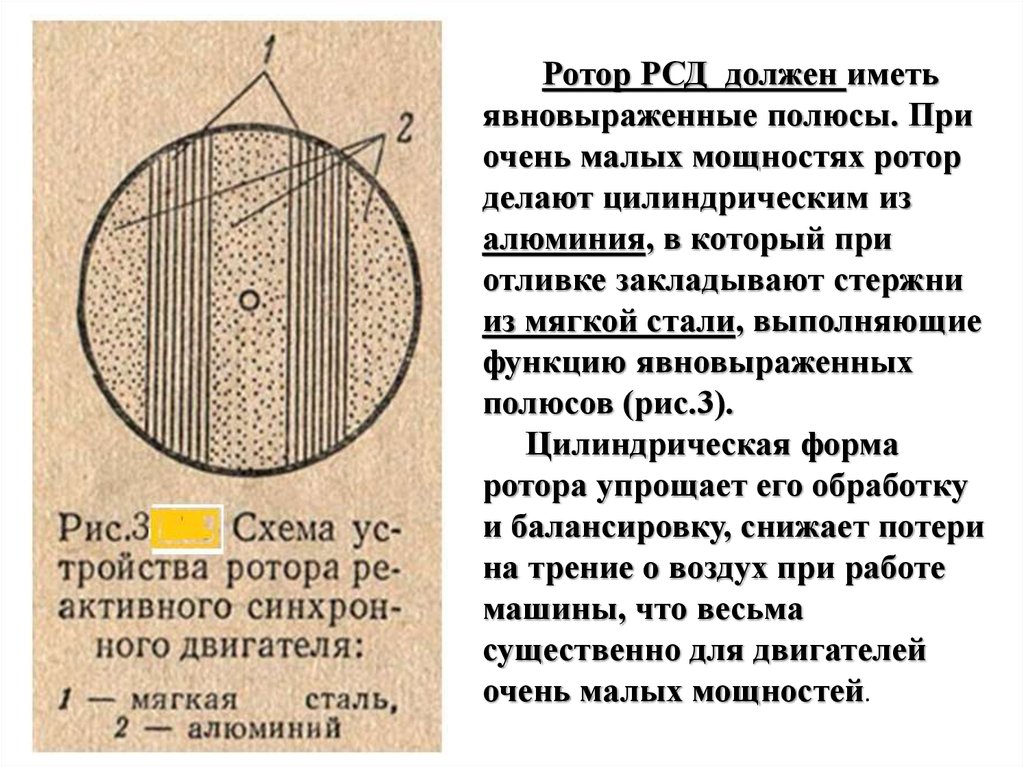
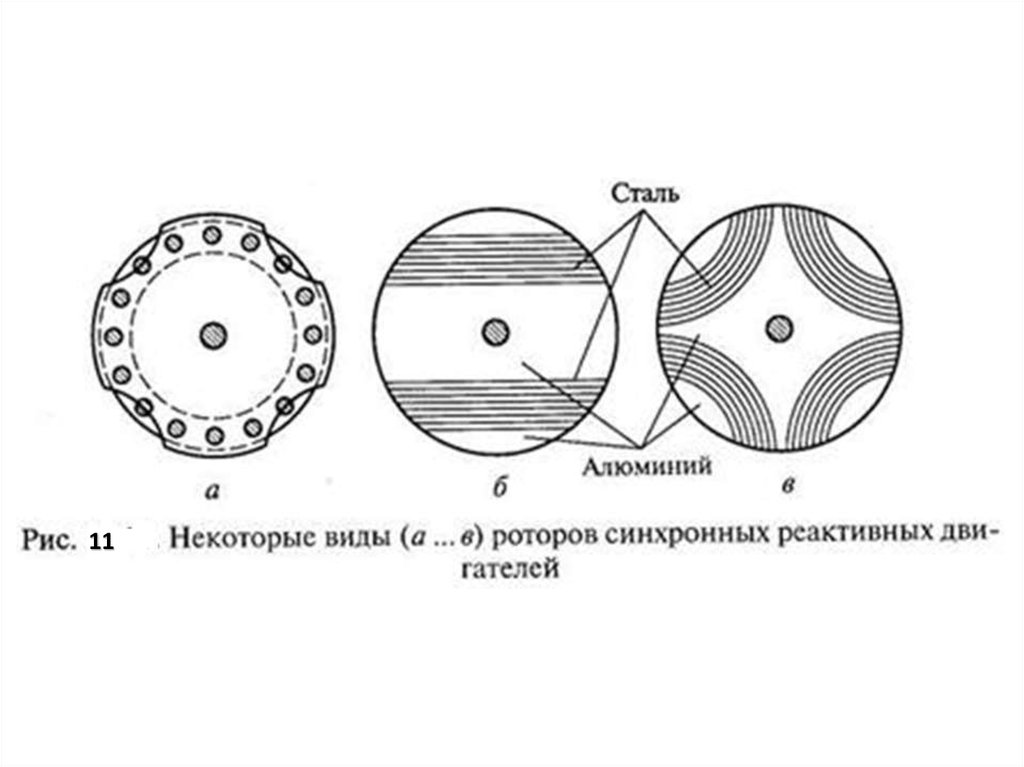
Ротор РСД должен иметьявновыраженные полюсы. При
очень малых мощностях ротор
делают цилиндрическим из
алюминия, в который при
отливке закладывают стержни
из мягкой стали, выполняющие
функцию явновыраженных
полюсов (рис.3).
Цилиндрическая форма
ротора упрощает его обработку
и балансировку, снижает потери
на трение о воздух при работе
машины, что весьма
существенно для двигателей
очень малых мощностей.
7.
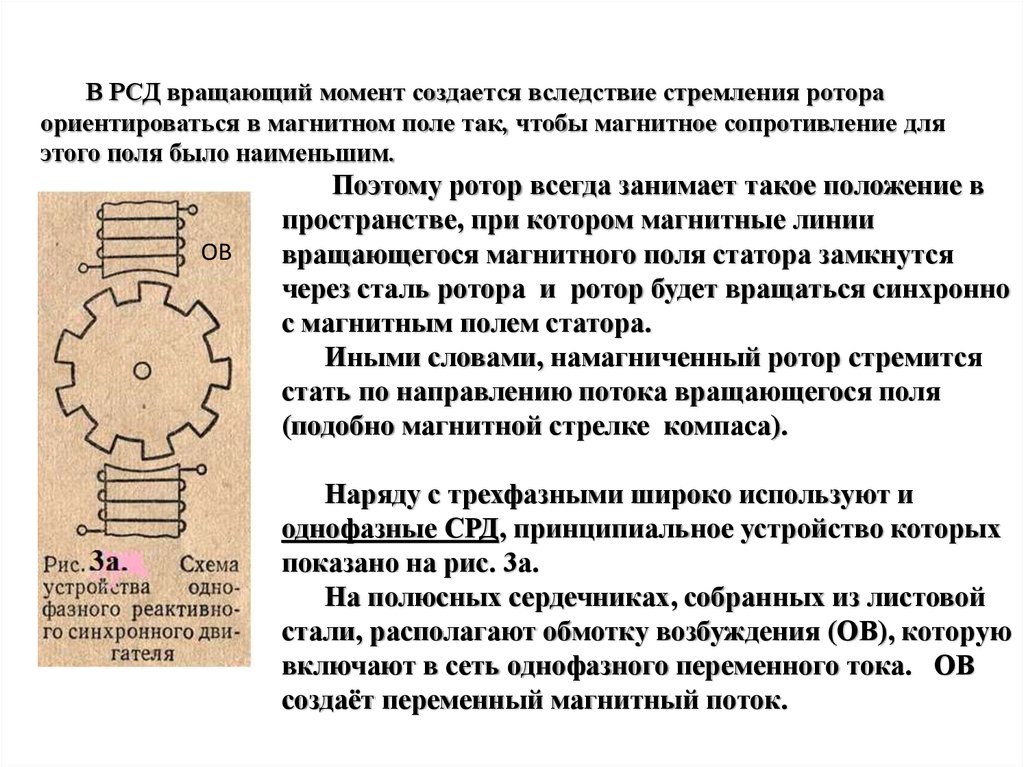
В РСД вращающий момент создается вследствие стремления ротораориентироваться в магнитном поле так, чтобы магнитное сопротивление для
этого поля было наименьшим.
ОВ
Поэтому ротор всегда занимает такое положение в
пространстве, при котором магнитные линии
вращающегося магнитного поля статора замкнутся
через сталь ротора и ротор будет вращаться синхронно
с магнитным полем статора.
Иными словами, намагниченный ротор стремится
стать по направлению потока вращающегося поля
(подобно магнитной стрелке компаса).
Наряду с трехфазными широко используют и
однофазные СРД, принципиальное устройство которых
показано на рис. 3а.
На полюсных сердечниках, собранных из листовой
стали, располагают обмотку возбуждения (ОВ), которую
включают в сеть однофазного переменного тока. ОВ
создаёт переменный магнитный поток.
8.
Ротор выполнен из стали в виде диска, на поверхностикоторого имеются зубцы (выступы). Вращающий момент в
таком двигателе создается в результате того, что при
увеличении магнитного потока магнитные линии, стремясь
замкнуться по пути с наименьшим магнитным
сопротивлением, притягивают зубец ротора к полюсу.
При уменьшении магнитного потока ротор по инерции
подвигается далее и при последующем возрастании
магнитного потока притягивается следующий зубец.
Таким образом, вращающий момент однофазного
синхронного двигателя не остается постоянным и
направленным в одну сторону, а непрерывно пульсирует, что
является причиной неравномерного, толчкообразного хода
двигателя. Для устранения этого недостатка роторы таких
двигателей выполняют массивными. Используется также
эластичное крепление статора в корпусе машины.
9.
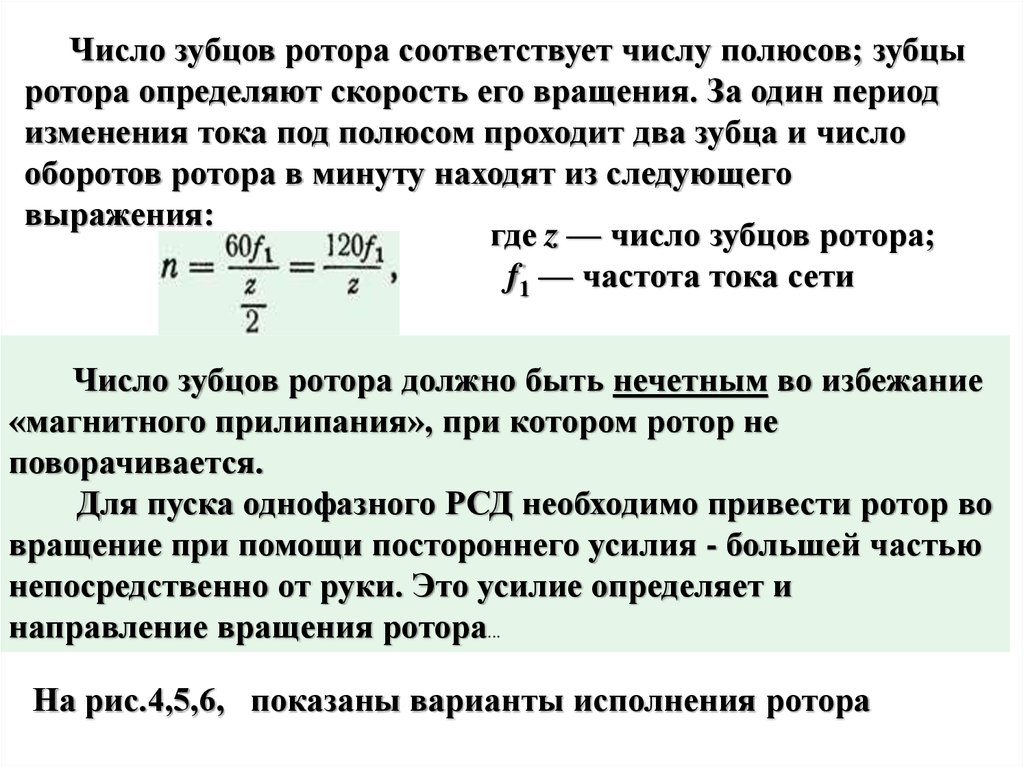
Число зубцов ротора соответствует числу полюсов; зубцыротора определяют скорость его вращения. За один период
изменения тока под полюсом проходит два зубца и число
оборотов ротора в минуту находят из следующего
выражения:
где z — число зубцов ротора;
f1 — частота тока сети
Число зубцов ротора должно быть нечетным во избежание
«магнитного прилипания», при котором ротор не
поворачивается.
Для пуска однофазного РСД необходимо привести ротор во
вращение при помощи постороннего усилия - большей частью
непосредственно от руки. Это усилие определяет и
направление вращения ротора...
На рис.4,5,6, показаны варианты исполнения ротора
10.
а)Ротор с явновыраженнымиполюсами
б)Аксиально-расслоенный
ротор
в)Поперечно-расслоенный
ротор
Рис.4.Роторы РСД
11.
Рис. 5.Пакет сердечника ротора (а) и листы (б-д) пакета РСД12.
б)а)
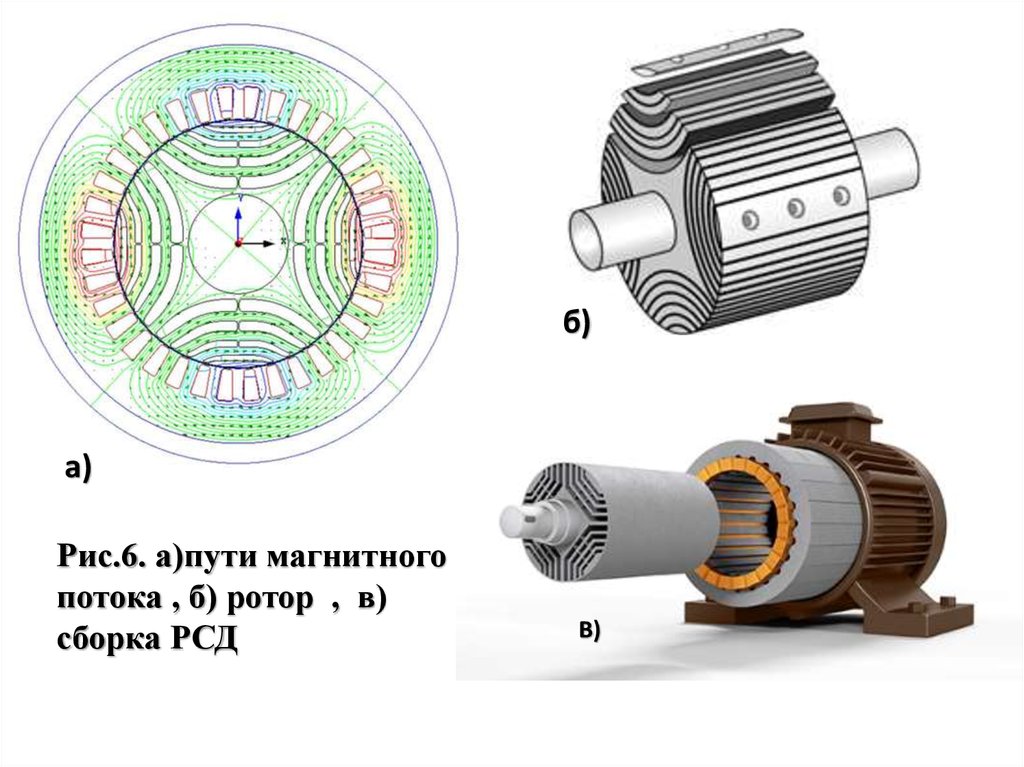
Рис.6. а)пути магнитного
потока , б) ротор , в)
сборка РСД
В)
13.
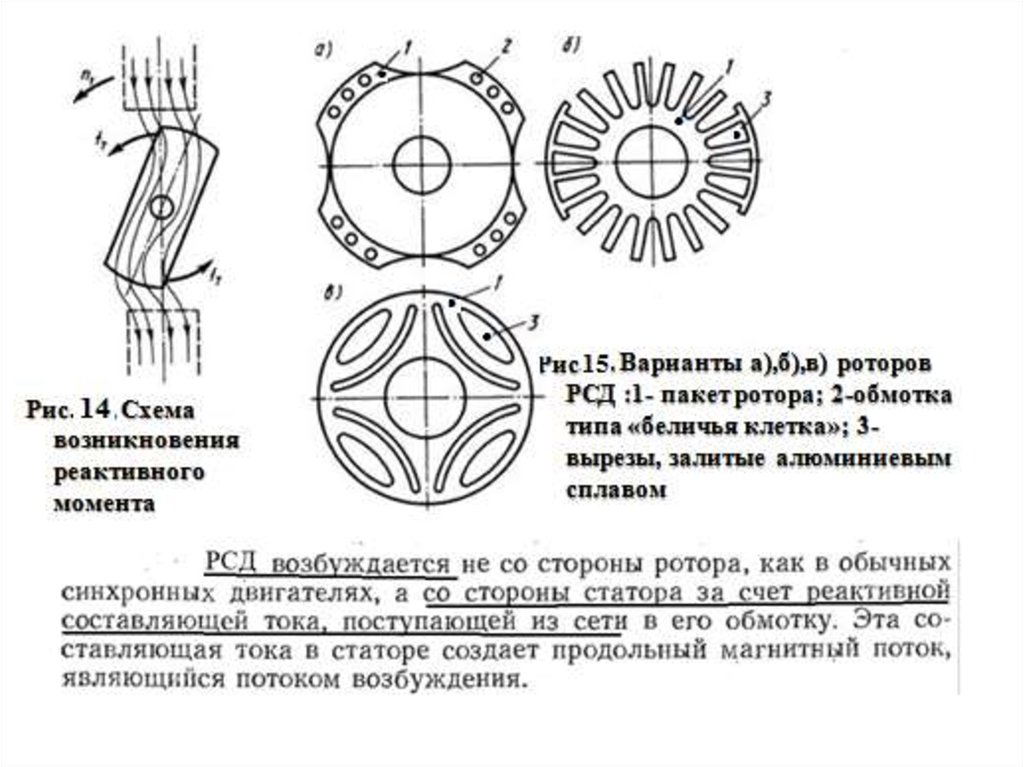
Отличительная особенность (СРД) — отсутствиевозбуждения со стороны ротора. Основной магнитный
поток в этом двигателе создается исключительно за счет
МДС обмотки статора. В двух- и в трехфазных СРД эта
МДС является вращающейся.
Для выяснения принципа действия СРД обратимся к
выражению электромагнитного момента явнополюсной
СМ, из которого следует, что если отключить обмотку
возбуждения ( Е0 = 0), то основная составляющая момента
становится равной нулю (МОСН= 0) и на ротор машины
продолжает действовать лишь реактивная составляющая
момента МР:
m1 U 1
1
MP
( ) sin 2
2 1 x q x d
2
1
14.
Явновыраженные полюсы ротора всегда стремятсяориентироваться относительно поля статора так, чтобы
магнитное сопротивление для силовых линий поля было
минимальным
Рис 7. Силы магнитного притяжения в РСД
15.
Рис. 8.Взаимодействие между статором и ротором; а)холостой ход, б)нагрузка, в)неустойчивое равновесие
16.
Принцип действия РСД.При включении обмотки статора в сеть возникает
вращающееся магнитное поле. Как только ось этого поля
d ′ - d ′ займёт положение в пространстве расточки статора,
при котором она будет смещена относительно продольной
оси d-d невозбужденных полюсов ротора на угол θ в сторону
вращения (рис. 7, а), между полюсами этого поля и
выступающими полюсами невозбужденного ротора
возникнет реактивная сила FР магнитного притяжения
полюса ротора к полюсу вращающегося поля статора.
Вектор этой силы F p смещен относительно продольной
оси ротора также на угол θ, поэтому сила имеет две
составляющие: нормальную Fnp, направленную по
продольной оси ротора, и тангенциальную Ftp ,
направленную перпендикулярно продольной оси полюсов
ротора.
17.
Совокупность тангенциальных составляющихреактивных сил Ftp на всех полюсах невозбужденного ротора
создаст вращающий реактивный момент Mp, который будет
вращать ротор с синхронной частотой ω1 .
С ростом механической нагрузки на вал СРД угол θ
увеличивается и момент Мр также увеличивается.
Из рис. 7, б видно, что при θ = 90° реактивные силы
магнитного притяжения FР , действующие на каждый полюс
невозбужденного ротора, взаимно уравновешиваются и
реактивный момент МР = 0.
Максимальное значение реактивного момента наступает
при значении угла θ = 45° (см. угловую характеристику на
рис. N.B. 1).
18.
Рис. N.B.119.
Мощность СРД и развиваемый им момент меньше, чем уСД с возбужденными полюсами ротора.
Объясняется это тем, что у СРД из-за отсутствия
магнитного потока ротора ЭДС Е0 = 0, поэтому основная
составляющая электромагнитного момента Мосн= 0 и
электромагнитный момент СРД определяется лишь
реактивной составляющей (М = МР).
Поэтому при одинаковых габаритах СД с возбужденными
полюсами ротора и СРД мощность на валу и развиваемый
момент у СРД намного меньше.
20.
Как же можно увеличить момент?На рис.9,а показана традиционная конструкция ротора СРД,
отличающаяся от ротора АД лишь
наличием
впадин,
обеспечивающих ротору явнополюсную конструкцию.
Чем больше эти впадины, тем больше отношение Xd/Xq ,
а, следовательно, больше и реактивный момент Мр.
Однако, с увеличением впадин растет средняя величина
воздушного зазора δ, что ведет к повышению
намагничивающего тока статора, и, следовательно, к
снижению энергетических показателей двигателя —
коэффициента мощности (cosφ) и КПД.
21.
.Рис. 9. Конструкция роторов РСД
x d / xq
22.
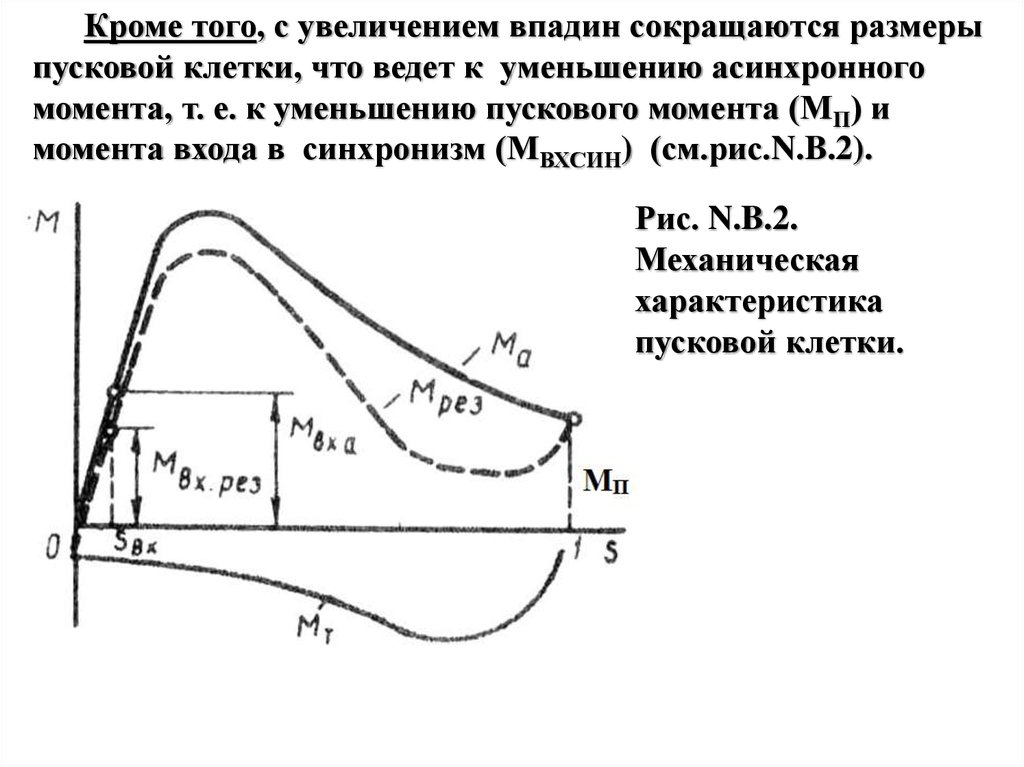
Кроме того, с увеличением впадин сокращаются размерыпусковой клетки, что ведет к уменьшению асинхронного
момента, т. е. к уменьшению пускового момента (МП) и
момента входа в синхронизм (МВХСИН) (см.рис.N.B.2).
Рис. N.B.2.
Механическая
характеристика
пусковой клетки.
23.
Наилучшие результаты получают при следующихсоотношениях размеров ротора:
bп / 0,5 0,6
и
max / min 10 12
В этом случае удается добиться отношения
x d / x q 2.
Более совершенна секционированная конструкция
ротора СРД, представляющая собой цилиндр, в котором
стальные полосы 2 залиты алюминием 1 (рис. 9.б) . Такая
конструкция позволяет получить отношение xd / xq 4 5
За счет этого существенно возрастает момент Мртах при
сохранении намагничивающего тока на допустимом уровне.
На торцах секционированного ротора имеются отлитые
из алюминия кольца, замыкающие алюминиевые прослойки
ротора, образуя к.з. пусковую клетку..
б
24.
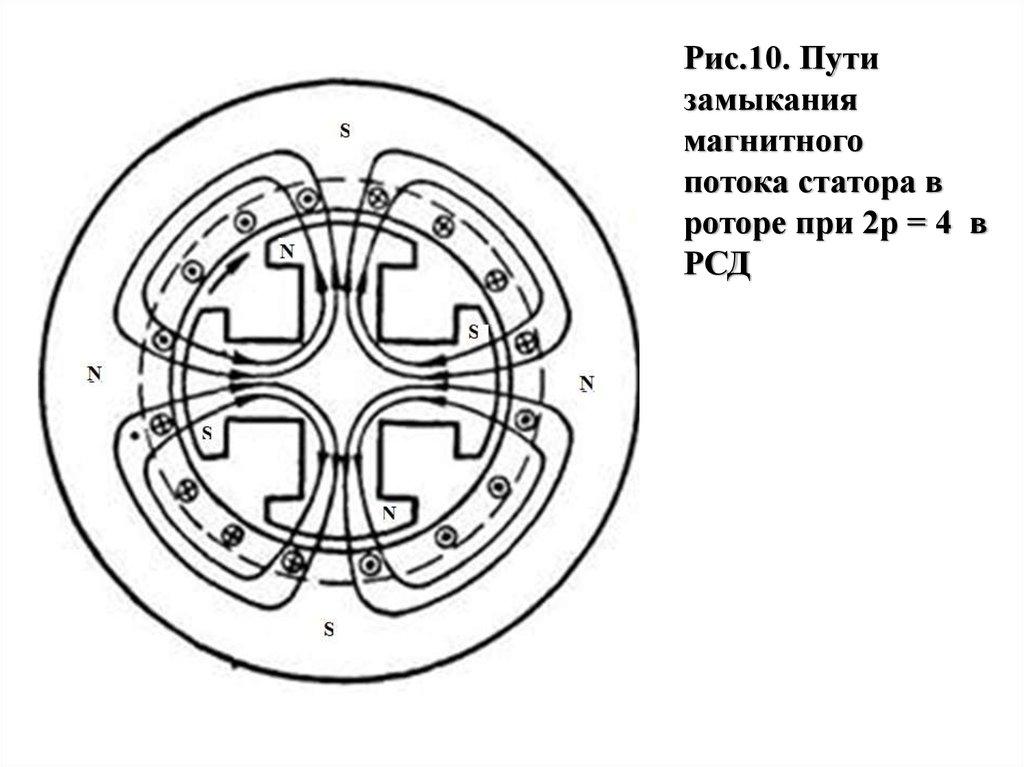
Рис.10. Путизамыкания
магнитного
потока статора в
роторе при 2р = 4 в
РСД
25.
1126.
Достоинства РСД:Простая и надежная конструкция ротора: ротор имеет простую
конструкцию, состоящую из тонколистовой электротехнической стали, без
магнитов и короткозамкнутой обмотки.
Низкий нагрев: так как в роторе отсутствуют токи, он не нагревается во
время работы, увеличивая срок службы электродвигателя.
Нет магнитов: снижается конечная цена электродвигателя, так как при
производстве не используют редко земельные металлы. При отсутствии
магнитных сил упрощается содержание и техническое обслуживание
электродвигателя.
Низкий момент инерции ротора: так как на роторе отсутствует
обмотка и магниты, момент инерции ротора мал, что
позволяет электродвигателю быстрее набирать обороты и экономить
электроэнергию.
Возможность регулирования скорости: в виду того, что РСД для
своей работы требует частотный преобразователь, имеется возможность
управления скоростью вращения реактивного двигателя в широком
диапазоне скоростей.с коррекцией мощности.
27.
Недостатки:Частотное управление: для работы требуется частотный
преобразователь.
Низкий коэффициент мощности: из-за того, что
магнитный поток создается только за счет реактивного тока.
Решается этот вопрос за счет использования частотного
преобразователя с коррекцией мощности.
Применение
Простота конструкции и высокая эксплуатационная
надежность обеспечили СРД малой мощности широкое
применение в:
- устройствах автоматики для привода самопишущих
приборов,
- устройствах звуко- и видеозаписи и
других установках, требующего строгого постоянства
частоты вращения..
28.
Выводы по теме РСД29.
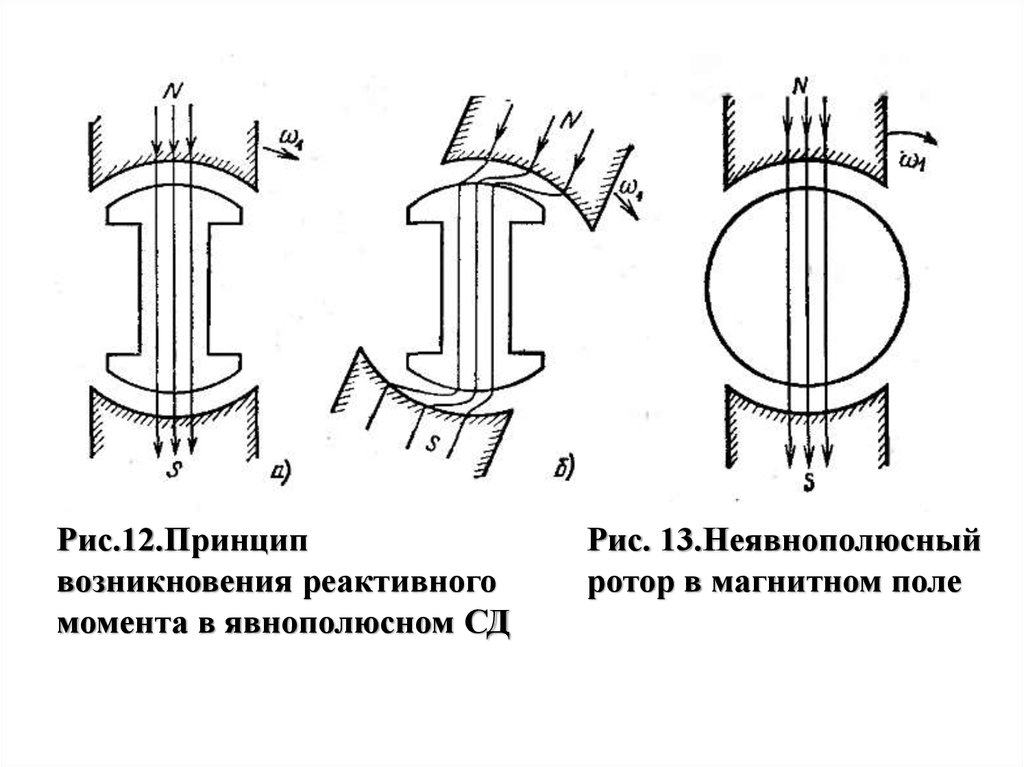
Рис.12.Принципвозникновения реактивного
момента в явнополюсном СД
Рис. 13.Неявнополюсный
ротор в магнитном поле
30.
31.
32.
Гистерезисные двигатели (ГД)Области применения ГД
К настоящему времени ГД нашли широкое применение
1)в маломощных управляемых приводах, 2) системах
автоматического управления, 3)в авиации, 4)в объектах
навигации, 5)в маркшейдерских устройствах, 6) для привода
гироскопов, 7)в атомной энергетике, 8)в пищевой,
9)химической, 10) медицинской промышленностях, 11) для
привода центрифуг, центробежных распылителей и
турбомолекулярных насосов, 12)в устройствах записи
воспроизведения информации для вращения дисков и
магнитных головок, 13)для перемещения ленты в
киноаппаратах, фототелеграфах и магнитофонах; 14)в
счетчиках времени и программных механизмах часовой
промышленности; 15)в качестве муфт, тахогенераторов,
демпферов и т.д.
33.
Рис.1. Синхронный гистерезисный электродвигатель34.
Гистерезисный электродвигатель - этонеявнополюсный синхронный электродвигатель, без
обмотки возбуждения, ротор которого выполнен из
магнитного материала с большим остаточным
намагничиванием , пуск в ход которого осуществляется за
.
счет потерь на гистерезис в роторе.
Статор ГД (рис.1, справа) имеет обычную трех- или
двухфазную обмотку, которая создает вращающееся
магнитное поле.
Ротор представляет собой массивный цилиндр (рис.1,
слева) без обмотки, изготовленный из магнитотвердого
материала с широкой петлей гистерезиса (рис.2,а)
(например, сплав викаллой). При этом в целях экономии
дорогостоящего магнитотвердого материала ротор делают
сборным (рис.2,б).
35.
Рис.2. а) петли гистерезиса: сплава викаллой (кривая1) иобычной электротехнической стали – (кривая 2);
б) устройство сборного ротора гистерезисного двигателя
36.
Применение обычной стали для изготовления ротора необеспечивает гистерезисного момента достаточной величины.
Только магнитно-твердые материалы, например, такие, как
викаллой (это сплавы, содержащие около 50 % Со, 4 - 15 % V,
остальное Fe. До окончательной термической обработки
механические свойства викаллоев приблизительно аналогичны
свойствам меди, а после обработки - свойствам стали), дают
возможность получить большой гистерезисный момент.
Поэтому роторы ГД обычно делают сборными. Магнитнотвердую часть выполняют в виде шихтованного или
массивного кольца 1, размещенного на втулке 2 (рис. 2, б).
Последняя жестко посажена на вал 3.
В машинах с нешихтованным (массивным) ротором
вращающееся поле статора наводит в роторе вихревые токи. В
результат взаимодействия этих токов с полем статора
возникает электромагнитный момент МВТ, значение которого
пропорционально скольжению:
37.
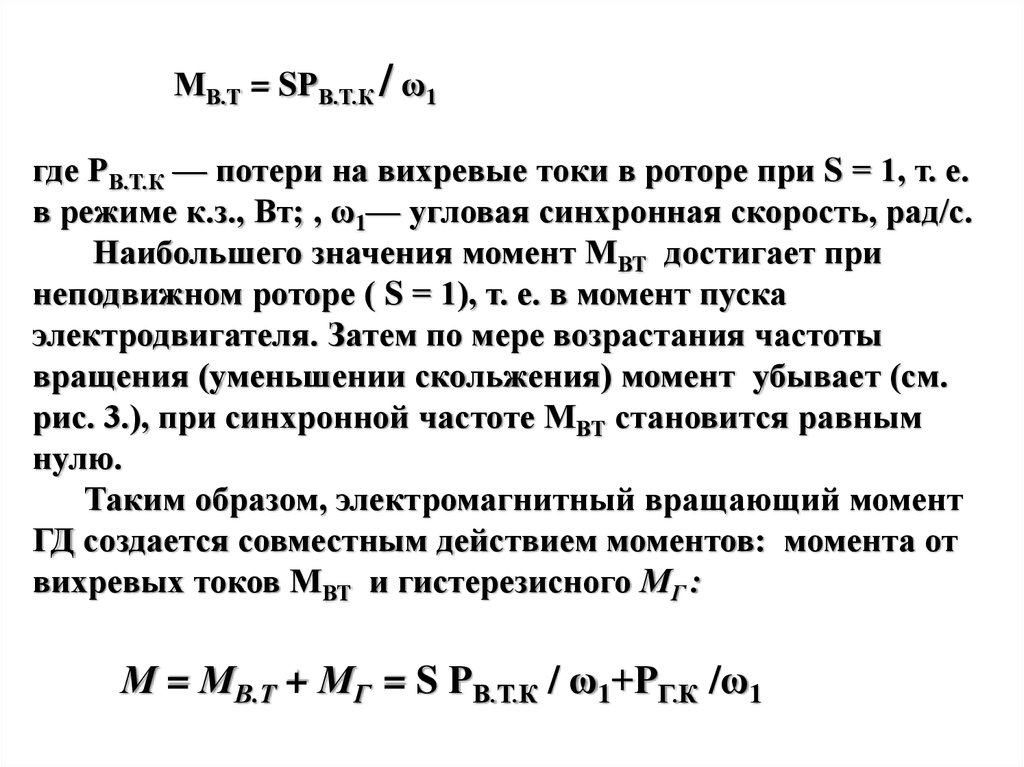
МВ.Т = SРВ.Т.К / ω1где РВ.Т.К — потери на вихревые токи в роторе при S = 1, т. е.
в режиме к.з., Вт; , ω1— угловая синхронная скорость, рад/с.
Наибольшего значения момент МВТ достигает при
неподвижном роторе ( S = 1), т. е. в момент пуска
электродвигателя. Затем по мере возрастания частоты
вращения (уменьшении скольжения) момент убывает (см.
рис. 3.), при синхронной частоте МВТ становится равным
нулю.
Таким образом, электромагнитный вращающий момент
ГД создается совместным действием моментов: момента от
вихревых токов МВТ и гистерезисного МГ :
М = МВ.Т + МГ = S РВ.Т.К / ω1+РГ.К /ω1
38.
Рис. 3. Механическиехарактеристики ГД
На рис.3 представлена
зависимость
результирующего
момента ГД от
скольжения: М = f(S).
Характер этой кривой
моментов МВТ и МГ
зависит
от
соотношения
ГД может работать с синхронной и асинхронной
частотами вращения. Работа ГД в асинхронном режиме
неэкономична, из-за значительных потерь на
перемагничивание ротора, величина которых возрастает с
увеличением скольжения..
.
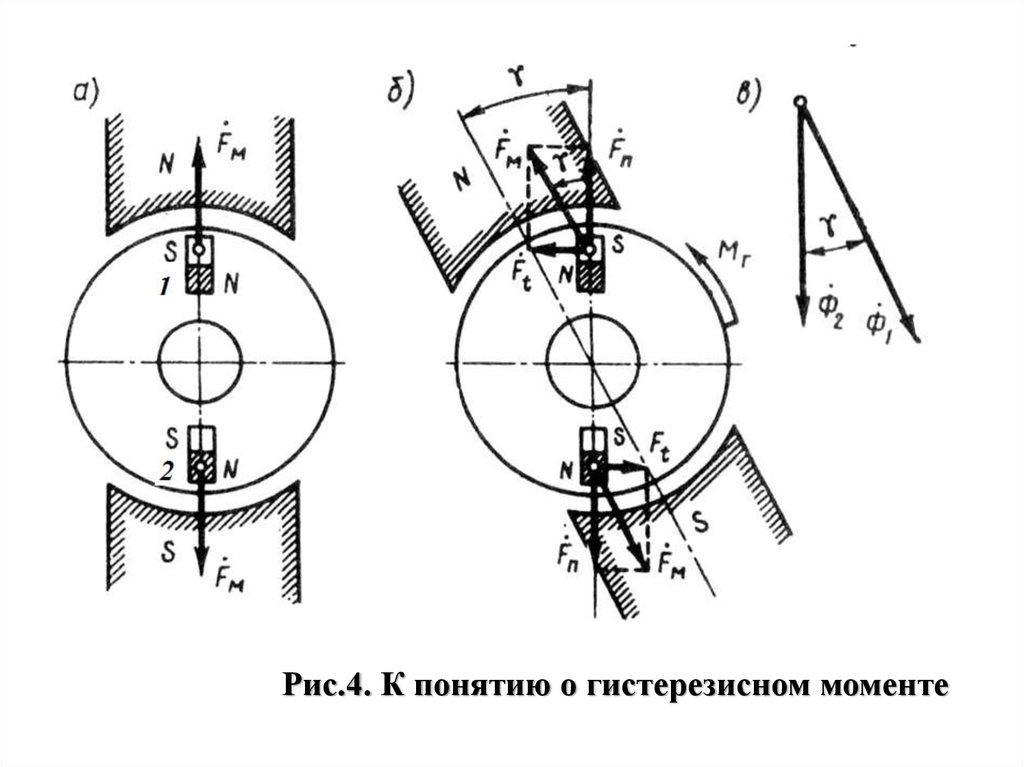
39.
Принцип работы синхронного гистерезисного двигателяоснован на действии гистерезисного момента.
Для наглядности на рисунке ниже показаны только два
элементарных магнитика ns 1 и 2. Сила взаимодействия
между этими магнитиками и полем статора NS направлена
по оси последнего (рис.4,а). Если поворачивать поле NS,
например, против часовой стрелке, то в том же направлении
поворачиваются и элементарные магнитики. Однако
вследствие магнитного гистерезиса магнитики ns не сразу
повернутся на тот же угол, что и поле NS. Между осями NS
и ns появится некоторый угол рассогласования γ. Помимо
радиальных сил появляются тангенциальные (рис. 4,б),
которые и создадут гистерезисный момент Мг.
Угол γ определяется формой петли гистерезиса материала, из
которого изготовлен ротор.
40.
Рис.4. К понятию о гистерезисном моменте41.
Гистерезисный момент Мг не зависит от частотывращения ротора. Радикальный способ увеличения
вращающего момента ГД- применение магнитотвердых
материалов с прямоугольной петлей гистерезиса (рис.2,а
кривая 1). Частота вращения такого двигателя синхронна с
частотой вращения поля, КПД высокий - до 80%.
Явление магнитного запаздывания заключается в том,
что частицы ферромагнитного материала ротора,
представляющие собой элементарные магниты, стремятся
ориентироваться в соответствии с направлением внешнего
магнитного поля.
Если внешнее магнитное поле изменит свое
направление, то элементарные частицы также меняют
ориентацию.
42.
Однако повороту элементарных частиц вмагнитотвердом материале препятствуют силы
молекулярного трения. Этим и объясняется появление угла
сдвига γ между вектором магнитного потока ротора Ф2 и
вектором магннтного потока обмотки статора Ф1 (рис. 4,в) .
Этот угол зависит исключительно от магнитных свойств
материала ротора.
.
Достоинства ГД—
.
1)простота конструкции, 2)бесшумность и 3)надежность в
работе, 4)большой пусковой момент, 5)плавность входа в
синхронизм, 6)сравнительно высокий КПД (до 80%),
7)малое изменение кратности тока от пуска до номинальной
нагрузки
I п / I ном 1,3 1,4
43.
Недостатки ГД—1)низкий коэффициент мощности (cosφ = 0,4-0.6),
2)сравнительно высокая стоимость материала ротора,
хотя, как правило, ротор изготовляют из обычной стали и на
него насаживают лишь полый цилиндр небольшой
толщины из магнитотвердого материала,
3) при резких колебаниях нагрузки ГД склонны к
качаниям, что создает неравномерность хода (вращения).
Объясняется это отсутствием у ГД пусковой клетки,
которая при резких изменениях нагрузки оказывает на
ротор успокаивающее (демпфирующее) действие. Наиболее
сильные качания наблюдаются у шихтованного ротора, в
котором вихревые токи сильно ограничены.
Вызываемая качаниями неравномерность вращения
ограничивает области применения ГД.