











































 informatics
informatics database
databaseSimilar presentations:
")


. Тема 6. Деревья")


")


")
Методы и средства хранения информации
1. Методы и средства хранения информации
ст. пр. Овчинников А.Л.2. Структура курса
Лекции – 18 часовЛабораторные занятия – 18 часов
Самостоятельная работа студента – 90 часов
Виды контроля:
Модульный контроль (тестирование)
Защита лабораторных работ
ЗАЧЕТ
2
3. Структура лекционного материала
СТРУКТУРЫ ДАННЫХ ДЛЯ ХРАНЕНИЯ И ПОИСКАМЕТОДЫ ОРГАНИЗАЦИИ ХРАНЕНИЯ ДАННЫХ В СУБД
РОЛЬ И ЗАДАЧИ ЗУ В СОВРЕМЕННЫХ ВЫЧИСЛИТЕЛЬНЫХ
СИСТЕМАХ И ЭВМ
КЛАССИФИКАЦИЯ УСТРОЙСТВ ХРАНЕНИЯ ИНФОРМАЦИИ
ОСНОВНЫЕ ПАРАМЕТРЫ ВЗУ
ОСНОВНЫЕ ХАРАКТЕРИСТИКИ НОСИТЕЛЕЙ ИНФОРМАЦИИ
МАГНИТНЫЕ НАКОПИТЕЛИ
ОПТИЧЕСКИЕ НАКОПИТЕЛИ(НАКОПИТЕЛИ НА КОМПАКТДИСКАХ, DVD)
ОТКАЗОУСТОЙЧИВЫЕ СИСТЕМЫ ХРАНЕНИЯ ДАННЫХ. RAIDМАССИВЫ
УСТРОЙСТВА ДЛЯ РЕЗЕРВНОГО КОПИРОВАНИЯ ДАННЫХ
3
4. Содержание лабораторного практикума
Лр1Исследование линейных и нелинейных структур данных. Линейные списки и бинарные деревья
поиска.
Цель работы: Исследовать возможности применения линейных и нелинейных структур данных – линейных списков и
бинарных деревьев поиска – для
хранения, поиска и обработки информации. Приобрести практические навыки
использования классов, реализующих списки и бинарные деревья поиска и исследовать их эффективность при выполнении
операций добавления, удаления и поиска данных.
Лр2
Исследование нелинейных структур данных. AVL-деревья
Цель работы: Исследовать возможности применения AVL-деревьев – для хранения, поиска и обработки информации.
Приобрести практические навыки использования классов, реализующих AVL-деревья. Оценить эффективность
использования AVL-деревьев в сравнении с бинарными деревьями поиска.
Лр3
Исследование Б-деревьев при доступе к данным во внешней памяти
Цель работы: Исследовать возможности применения нелинейных структур данных – Б-деревьев, для хранения и поиска
информации. Приобрести практические навыки использования Б-деревьев для реализации эффективного поиска и доступа
к данным во внешней памяти. Произвести оценку эффективности использования Б-деревьев для организации хранения
данных.
Лр4
Структуры данных, основанные на хеш-таблицах
Цель работы: Исследовать возможности применения нелинейных структур данных – хеш-таблиц для хранения и обработки
информации. Приобрести практические навыки использования хеш-таблиц для реализации быстрого доступа к данным.
Лр5
Исследование подсистемы WINAPI по работе с дисками
Цель работы: Исследовать подсистему WINAPI по работе с дисковой подсистемой, приобрести практические навыки
разработки программного обеспечения, использующего информацию о накопителях информации.
Лр6
Исследование главной загрузочной записи диска
Цель работы: Изучение структуры главной загрузочной записи жесткого диска. Получение практических навыков работы с
главной загрузочной записью.
4
5. Литература
1.Савицкий, Н. И. Технологии организации, хранения и обработки данных
[Текст] : учеб. пособие / Н. И. Савицкий. - М. : ИНФРА - М, 2001. (рус.).
2.
Гук, М. Аппаратные средства IBM РС [Текст] : энцикл. / М. Гук. - 2-е изд. М. и др. : Питер, 2004. - 928 с. (рус.).
3.
Гасанов, Э. Э. Теория хранения и поиска информации [Текст] / Э. Э.
Гасанов, В. Б. Кудрявцев. - М. : Физматлит, 2002. - 288 с. (рус.).
4.
Кузнецов, С. Д. СУБД( системы управления базами данных) и файловые
системы [Текст] : научно-популярная литература / С. Д. Кузнецов; . - М. :
Майор, 2001. - 175 с. (рус.).
5.
Гук, М. Дисковая подсистема ПК [Текст] / М. Гук. - СПб. и др. : Питер, 2001.
- 336 с. (рус.).
6.
Побегайло, А. Системное программирование в Windows [Текст] / А.
Побегайло. - СПб. : БХВ - Петербург, 2006. - 1056 с. (рус.).
5
6. ЛИНЕЙНЫЕ И НЕЛИНЕЙНЫЕ СТРУКТУРЫ ДАННЫХ. ЛИНЕЙНЫЕ СПИСКИ И БИНАРНЫЕ ДЕРЕВЬЯ ПОИСКА.
Список – это линейная динамическая структура данных.Каждый элемент такой структуры, в простейшем случае
содержит два поля:
поле данных;
поле – указатель на следующий элемент.
С помощью указателя каждый из элементов списка
связывается со следующим элементом (в случае
однонаправленного списка)
Голова
Данные
next
Данные
next
Данные
next
Для работы со списком обязательно хранится указатель на
первый элемент(голову) списка.
6
7. ЛИНЕЙНЫЕ И НЕЛИНЕЙНЫЕ СТРУКТУРЫ ДАННЫХ. ЛИНЕЙНЫЕ СПИСКИ И БИНАРНЫЕ ДЕРЕВЬЯ ПОИСКА.
Основным отличием списка от массива является то, чтосписок является динамической структурой. Это
позволяет:
создавать список, не резервируя лишнего места в памяти
создавать список той длины, которая необходима программе на
данный момент времени, не опасаясь его переполнения.
Однако, в списке отсутствует возможность сразу
обратиться к произвольному элементу, что существенно
замедляет поиск (в массиве доступ к любому элементу
может быть получен с использованием индекса).
Добавление элементов, как правило, осуществляется в
конец списка, поэтому желательно также всегда хранить
указатель и на последний элемент – хвост списка.
Хвост
Голова
Данные
ne
xt
Данные
ne
xt
Данные
ne
xt
7
8. ЛИНЕЙНЫЕ И НЕЛИНЕЙНЫЕ СТРУКТУРЫ ДАННЫХ. ЛИНЕЙНЫЕ СПИСКИ И БИНАРНЫЕ ДЕРЕВЬЯ ПОИСКА.
При удалении некоторого элемента списка необходимонайти предыдущий и следующий элементы и связать их
(указатель предыдущего должен теперь указывать на
следующий, а не на удаляемый). Только после этого можно
освободить память от удаляемого элемента.
Голова
Данные
ne
xt
Данные
ne
xt
Данные
ne
xt
8
9. ЛИНЕЙНЫЕ И НЕЛИНЕЙНЫЕ СТРУКТУРЫ ДАННЫХ. ЛИНЕЙНЫЕ СПИСКИ И БИНАРНЫЕ ДЕРЕВЬЯ ПОИСКА.
В отличии от линейного списка, дерево – нелинейнаядинамическая структура данных.
Древовидная структура характеризуется:
множеством узлов (nodes), происходящих от единственного
начального узла, называемого корнем (root).
Каждый узел может быть родителем (parent), указывающим на 1
или более узлов, называемых сыновьями (children).
Каждый некорневой узел имеет только одного родителя, и каждый
родитель имеет 0 или более сыновей.
Узел, не имеющий детей, называется листом (leaf).
Рисунок 1 – Древовидная структура
9
10. ЛИНЕЙНЫЕ И НЕЛИНЕЙНЫЕ СТРУКТУРЫ ДАННЫХ. ЛИНЕЙНЫЕ СПИСКИ И БИНАРНЫЕ ДЕРЕВЬЯ ПОИСКА.
Длина пути от корня к какому-либо узлу есть уровеньузла. Уровень корня равен 0. Каждый сын корня является
узлом 1-го уровня, следующее поколение – узлами 2-го
уровня и т.д. Например, на рисунке 2 узел F является узлом
2-го уровня (с длиной пути 2).
Глубина (depth) дерева есть его максимальный
уровень. Понятие глубины также может быть описано в
терминах пути. Глубина дерева есть длина самого длинного
пути от корня до узла. На рисунке 2 глубина дерева равна
3.
Рисунок 2 - Уровень узла и длина пути
10
11. ЛИНЕЙНЫЕ И НЕЛИНЕЙНЫЕ СТРУКТУРЫ ДАННЫХ. ЛИНЕЙНЫЕ СПИСКИ И БИНАРНЫЕ ДЕРЕВЬЯ ПОИСКА.
Cосредоточимся на ограниченном классе деревьев, гдекаждый родитель имеет не более двух сыновей.
Такие деревья называются бинарными деревьями.
Бинарные деревья (binary trees) имеют
унифицированную структуру, допускающую разнообразные
алгоритмы прохождения и эффективный доступ к
элементам.
Рисунок 3 - Бинарные деревья
На уровне n бинарное дерево может содержать от 1 до 2n узлов. Число узлов,
приходящееся на уровень, является показателем плотности дерева. На
рисунке 3 дерево А содержит 8 узлов при глубине 3, в то время как дерево B
содержит 5 узлов при глубине 4. Последний случай является особой формой,
называемой вырожденным (degenerate) деревом, у которого есть
11
единственный лист (E) и каждый нелистовой узел имеет только одного сына.
12. ЛИНЕЙНЫЕ И НЕЛИНЕЙНЫЕ СТРУКТУРЫ ДАННЫХ. ЛИНЕЙНЫЕ СПИСКИ И БИНАРНЫЕ ДЕРЕВЬЯ ПОИСКА.
Законченные бинарные деревья (complete binary tree) деревья глубины N, где каждый уровень 0...N-1 имеетполный набор узлов, и все листья уровня N расположены
слева.
Законченное бинарное дерево, содержащее 2N узлов на
уровне N, является полным.
На рисунке показаны законченное и полное бинарные
деревья:
12
13. ЛИНЕЙНЫЕ И НЕЛИНЕЙНЫЕ СТРУКТУРЫ ДАННЫХ. ЛИНЕЙНЫЕ СПИСКИ И БИНАРНЫЕ ДЕРЕВЬЯ ПОИСКА.
Законченные и полные бинарные деревья обладаютследующими свойствами:
На нулевом уровне имеется 20 узлов, на первом - 21, на втором - 22 и
т.д. На первых k-1 уровнях имеется 2k-1 узлов: 1 + 2 + 4 + ... + 2k1 = 2k-1
На уровне k количество дополнительных узлов колеблется от 1 до
2k (полное). В полном дереве число узлов равно:1 + 2 + 4 + ... +
2k-1 + 2k = 2k+1 - 1
Число узлов законченного бинарного дерева удовлетворяет
неравенству:2k < N < 2k-1 - 1 < 2k-1; решая его относительно k,
имеем: k < log2 (N) < k+1
В случае, если бинарное дерево упорядочено, т.е. для каждого
поддерева выполняется условие – значение каждого узла левого
поддерева меньше значения корневого узла, а значение любого узла
правого поддерева больше или равно значения корневого узла – такое
дерево называется бинарным деревом поиска.
Упорядоченность дерева накладывает свои особенности на процедуры
создания дерева, добавления и удаления элементов (узлов), а также
поиска.
13
14. ЛИНЕЙНЫЕ И НЕЛИНЕЙНЫЕ СТРУКТУРЫ ДАННЫХ. ЛИНЕЙНЫЕ СПИСКИ И БИНАРНЫЕ ДЕРЕВЬЯ ПОИСКА.
Очевидно, что бинарное дерево поиска будет иметьсущественные преимущества перед линейным списком по
времени поиска данных.
Действительно, если для поиска в линейном списке,
содержащем N элементов, в худшем случае нужно
выполнить N операций сравнения, то в случае полного
бинарного дерева поиска, содержащего такое же
количество элементов, наибольшее количество сравнений
- log2(N).
Очевидно, что чем больше N, тем более выгодно
использование при поиске бинарного дерева поиска по
сравнению с линейным списком.
Однако, при сравнении двух рассматриваемых структур по времени
выполнения операций добавления элементов следует отметить
преимущество линейного списка.
Действительно, при добавлении в бинарное дерево поиска сначала
придется найти подходящий лист(выполнив при этом в случае полного
дерева log2(N) операций сравнения), тогда как добавление к списку, в
14
случае хранения хвоста происходит сразу же.
15. ЛИНЕЙНЫЕ И НЕЛИНЕЙНЫЕ СТРУКТУРЫ ДАННЫХ. ЛИНЕЙНЫЕ СПИСКИ И БИНАРНЫЕ ДЕРЕВЬЯ ПОИСКА.
Как известно, при удалении узла из бинарного деревапоиска, необходимо сначала найти требуемый элемент,
а затем может возникнуть необходимость модификации
дерева (замещения удаляемого узла), при этом требуется
время и на поиск замещающего узла.
В списке же, удаление узла также сводится к его поиску
(причем, в однонаправленном списке желательно сразу же
найти и предыдущий элемент), после чего
переопределением указателя предыдущего элемента
текущий элемент может быть удален из списка.
Таким образом, в случае небольшого числа элементов,
возможно и преимущество линейного списка, однако,
с ростом числа элементов все существеннее будет
преимущество бинарного дерева поиска.
15
16. Сбалансированные деревья. AVL-деревья.
Как известно, при некотором стечении обстоятельствбинарное дерево поиска может оказаться вырожденным.
Тогда высота его будет N, и доступ к данным существенно
замедлится.
Существует модифицированный класс бинарных деревьев,
обладающих всеми преимуществами бинарных деревьев
поиска и никогда не вырождающихся.
Они называются сбалансированными или AVLдеревьями (по именам авторов Адельсона-Вельского и
Ландиса)
Под сбалансированностью понимают то, что для каждого узла дерева
высоты обоих его поддеревьев различаются не более чем на 1.
Строго говоря, этот критерий нужно называть AVLсбалансированностью в отличие от идеальной сбалансированности,
когда для каждого узла дерева количества узлов в левом и правом
поддеревьях различаются не более чем на 1.
16
17. Сбалансированные деревья. AVL-деревья.
В общем случае высота сбалансированного дерева непревышает log2N.
Таким образом, AVL-дерево является структурой хранения,
обеспечивающей быстрый доступ к данным, независимо от
порядка поступления ключей при его построении.
Очевидно, что AVL-деревья имеют структуру, аналогичную
бинарным деревьям поиска.
Все операции идентичны описанным для бинарных деревьев,
за исключением операций добавления и удаления узлов.
В случае AVL-деревьев, после выполнения каждой из этих
операций проверяется соотношение высот левого и
правого поддеревьев тех узлов, которые затронула
операция(от добавленного/удаленного узла до корня).
Значение, содержащее разность высот правого и левого
поддеревьев - показатель сбалансированности - хранится
17
в дополнительном поле каждого узла AVL-дерева.
18. Сбалансированные деревья. AVL-деревья.
AVL-деревья со значениями показателя сбалансированностиЕсли показатель сбалансированности отрицателен, то узел
«перевешивает влево», так как высота левого поддерева
больше, чем высота правого поддерева.
При положительном показателе сбалансированности узел
«перевешивает вправо».
Сбалансированный по высоте узел имеет показатель
сбалансированности равный 0.
В AVL-дереве показатель сбалансированности
каждого узла должен принимать значения из
диапазона [-1, 1].
18
19. Сбалансированные деревья. AVL-деревья.
Алгоритм AVL-вставкиПроцесс поиска места для вставки нового узла в
AVL-дерево такой же, как и в случае бинарного
дерева поиска.
Осуществляется спуск по левым и правым
сыновьям, пока не встретится пустое поддерево, а
затем производится предварительная вставка
нового узла в этом месте(возможно использование
рекурсивного спуска).
Обновление показателей сбалансированности
узлов, затронутых при добавлении ведется в
обратном порядке(при возвращении из рекурсии).
При этом показатель сбалансированности
родительского узла можно скорректировать после
изучения эффекта от добавления нового элемента
в одно из его поддеревьев. Необходимость
корректировки определяется для каждого узла,
19
входящего в поисковый маршрут.
20. Сбалансированные деревья. AVL-деревья.
Алгоритм AVL-вставкиЕсть три возможных ситуации.
В двух первых случаях узел сохраняет
сбалансированность, и реорганизация поддеревьев
не требуется. Нужно лишь скорректировать
показатель сбалансированности данного узла.
В третьем случае разбалансировка дерева требует
модификации дерева – выполнения процедур
одинарного или двойного поворотов узлов.
20
21. Сбалансированные деревья. AVL-деревья.
Алгоритм AVL-вставкиСлучай 1. Узел на поисковом маршруте
изначально является сбалансированным
(показатель сбалансированности равен 0). После
вставки в поддерево нового элемента узел стал
перевешивать влево или вправо в зависимости от
того, в какое поддерево была произведена
вставка:
21
22. Сбалансированные деревья. AVL-деревья.
Алгоритм AVL-вставкиСлучай 2. Одно из поддеревьев узла перевешивает, и
новый узел вставляется в более легкое поддерево. Узел
становится сбалансированным:
22
23. Сбалансированные деревья. AVL-деревья.
Алгоритм AVL-вставкиСлучай 3. Одно из поддеревьев узла
перевешивает, и новый узел помещается в более
тяжелое поддерево. Очевидно, что при этом
нарушается условие сбалансированности дерева,
так как показатель сбалансированности выходит за
пределы -1..1.
Чтобы восстановить равновесие, нужно выполнить
модификацию дерева – одну из процедур
поворота дерева.
Повороты AVL-дерева
Повороты необходимы, когда родительский узел (обозначим
его P) становится разбалансированным - баланс фактор
становится равен 2 или -2.
Одинарный поворот вправо (single right rotation)
происходит тогда, когда родительский узел P и его левый
сын (обозначим его LC) начинают перевешивать влево
23
после вставки узла в позицию X.
24. Сбалансированные деревья. AVL-деревья.
Алгоритм AVL-вставки. Одинарный поворот.В процессе одинарного поворота:
LC замещает своего родителя, который становится
правым сыном.
Бывшее правое поддерево узла LC (ST) присоединяется
к P в качестве левого поддерева.
Одинарный поворот уравновешивает как родителя, так и его левого сына.
24
25. Сбалансированные деревья. AVL-деревья.
Алгоритм AVL-вставки25
26. Сбалансированные деревья. AVL-деревья.
Алгоритм AVL-вставки. Одинарный поворот.template <class T>
void AVLTree<T>::SingleRotateRight
(AVLTreeNode<T>* &p)
{
AVLTreeNode<T> *lc;
// установить lc на левое поддерево
lc = p->Left();
// скорректировать показатели
сбалансированности
p->balanceFactor = balanced;
lc->balanceFactor = balanced;
p->left = lc->Right();
// переместить p в правое
//поддерево узла lc.
lc->right = p;
// сделать lc новым
//корнем.
p = lc;
}
26
27. Сбалансированные деревья. AVL-деревья.
Алгоритм AVL-вставки. Двойной поворот.Двойной поворот вправо (double right rotation) нужен тогда,
когда
родительский
узел
(P)
становится
перевешивающим влево, а его левый сын (LC)
перевешивающим вправо.
NP – корень правого перевешивающего поддерева узла LC.
Тогда в результате поворота:
1. Узел NP замещает
родительский узел.
2. Бывший родитель P
становится правым
сыном NP .
3. Осиротевшие
поддеревья NP
распределяются к
LC и P .
27
28. Сбалансированные деревья. AVL-деревья.
Алгоритм AVL-вставки. Двойной поворот.28
29. Сбалансированные деревья. AVL-деревья.
Алгоритм AVL-вставки. Двойной поворот.29
30. Сбалансированные деревья. AVL-деревья.
Оценка сбалансированных деревьевAVL-деревья требуют дополнительных затрат на
поддержание сбалансированности при вставке или удалении
узлов(повороты требуются примерно в половине случаев
вставок и удалений).
Если в дереве постоянно происходят вставки и удаления
элементов, эти операции могут значительно снизить
быстродействие.
С другой стороны, если данные превращают бинарное
дерево поиска в вырожденное, то теряется поисковая
эффективность.
Таким образом, применение AVL-деревьев
целесообразно в тех случаях, когда поиск является
доминирующей операцией.
В таких случаях сначала происходит построение дерева, а потом производится
поиск по этому дереву с небольшим количеством изменений.
30
31.
Доступ к данным во внешней памяти.B-деревья.
До сих пор задача поиска решалась в предположении, что
данные хранятся во внутренней(оперативной) памяти
Если структуры данных, например, бинарное дерево
поиска или AVL-дерево, расположены не в оперативной
памяти, а на диске, то они становятся
малоэффективными.
При работе с данными, хранящимися на внешних
носителях, целесообразно сокращать количество
обращений к носителю.
Если предположить, что в одном узле дерева, хранящегося на
диске, будет расположен не один, а несколько элементов –
Например,
N=1млн.,
число страницей
обращений кдерева
обычному
узел в этомпри
случае
называется
и задереву
одно
6 20), а при постраничном чтении,
равно
примерно
20(log
10
обращение
к диску
будет
считываться
целая страница, то
2
например,
по 7 элементов,
число
обращений
сократится в 3
число обращений
к диску при
поиске
существенно
31
раза,
что ускорит поиск в 3 раза.
уменьшится.
32. Доступ к данным во внешней памяти. B-деревья.
В 1970 году Р. Байер и Маккрейт предложили структуруданных,
названную
B-деревьями,
позволяющую
производить поиск по большому дереву, расположенному во
внешней памяти.
Определение: Б-деревом порядка n называется
динамическая структура обладающая следующими
свойствами:
1. Каждая страница имеет не более 2n элементов
2. Каждая страница, кроме корневой, имеет не
менее n элементов. Корневая страница может
иметь от 1 до 2n элементов
3. Каждая страница является либо листовой, либо
содержит m+1 потомков, где m - число элементов
на этой странице
32
4. Все листья находятся на одном уровне
33. Доступ к данным во внешней памяти. B-деревья.
1. Каждая страница имеет не более 2n элементов2. Каждая страница, кроме корневой, имеет не менее n
элементов. Корневая страница может иметь от 1 до 2n
элементов
3. Каждая страница является либо листовой, либо содержит
m+1 потомков, где m - число элементов на этой странице
4. Все листья находятся на одном уровне
33
34. Доступ к данным во внешней памяти. B-деревья.
Элементы на страницах B-деревьев располагаются ввозрастающем порядке. Если спроецировать Б-дерево на
один-единственный уровень, включая потомков между
ключами их родительской страницы, то ключи идут в
возрастающем порядке слева направо.
Память в B-дереве всегда используется минимум на 50%,
так как страницы всегда заполнены как минимум
34
наполовину!
35. Доступ к данным во внешней памяти. B-деревья.
Алгоритм поиска элемента в B-деревеПусть задан некоторый аргумент поиска х и страница имеет
вид:
Если страница уже считана в оперативную память и можно
Если
поиск элемента
х на странице
неудачен,
то мыключей
попадаем
воспользоваться
обычными
методами
поиска среди
ki
в
...одну
km. из следующих ситуаций:
1.
ki <mхдостаточно
< ki+1 длябольшое,
1 i < m.
Поиск
на
Если
то это
можетпродолжается
быть двоичный
странице
pi. оно мало, то можно воспользоваться простым
поиск,
если же
2.
km < х. Поиск продолжается
последовательным
перебором. на странице рm.
3. х < k1. Поиск продолжается на странице р0.
35
36. Доступ к данным во внешней памяти. B-деревья.
Включение элемента в B-деревоВключение в B-дерево проводится только в листовые
страницы. При этом поиск листовой страницы для вставки
элемента происходит согласно алгоритма поиска в B-дереве.
Если новый элемент нужно поместить на страницу с m < 2n
элементами, то процесс включения элемента затрагивает
лишь одну страницу B-дерева.
Включение в заполненную страницу затрагивает структуру
дерева и может привести к появлению новых страниц.
36
37. Доступ к данным во внешней памяти. B-деревья.
Включение элемента в Bдерево1. Обнаруживается, что
ключ 23 отсутствует.
Включение в страницу A
невозможно, поскольку она уже
заполнена.
2. Страница A
разделяется на две страницы
(вводится новая страница C).
3. Ключи — их всего 2n+1—
поровну распределяются в С и
A, а серединный ключ
переносится наодин уровень
вверх на «родительскую»
страницу.
37
38. Доступ к данным во внешней памяти. B-деревья.
Включение элемента в BдеревоПроцесс добавления элементов в Б-дерево представлен на
рисунке, причем включаемые ключи идут в таком порядке:
20; 40 10 30 15; 35 7 26 18 22; 5; 42 13 46 27 8 32 38 24 45 25;
38
39. Доступ к данным во внешней памяти. B-деревья.
Исключение элемента из B-дереваПри исключении элемента из B-дерева можно выделить
два случая:
1. Исключаемый элемент находится на листовой странице.
2. Элемент находится не на листовой странице.
В первом случае, удаление элемента с листовой страницы не
вызовет затруднений, если эта страница содержит более n
элементов.
Если же количество элементов на странице после
удаления станет меньше n, то необходимо проделать
некоторые действия, чтобы предотвратить нарушение
второго условия B-дерева (m>=n).
В этом случае для текущей страницы необходимо
позаимствовать элемент с одной из соседних страниц.
Если соседняя страница содержит более n элементов, то происходит
перемещение крайнего элемента (ближнего к текущей странице) в
39
родительскую страницу, а элемент из родительской страницы в текущую.
40. Доступ к данным во внешней памяти. B-деревья.
Исключение элемента из B-дереваВ том случае, если занять элемент на соседних
страницах невозможно (они содержат по n
элементов), выполняется процедура слияния двух
страниц.
Так как общее число элементов на двух соседних
страницах после удаления становится равным 2n-1,
то, забирая элемент с родительской страницы,
получим одну страницу содержащую 2n элементов.
При этом вторая освободившаяся страница
уничтожается. Процесс слияния страниц в точности
обратен процессу разделения страницы.
40
41. Доступ к данным во внешней памяти. B-деревья.
Исключение элемента из B-дереваРассмотрим деградацию Б-дерева в случае удаления ключей
в последовательности:
25 45 24; 38 32; 8 27 46 13 42; 5 22 18 26; 7 35 15;
41
42. Программная реализация B-дерева.
//задаем порядок дерева#define LEVEL 3
//количество элементов на странице
#define ITEM_ON_LEVEL 2*LEVEL
//задаем максимальное количество страниц
#define MAX_PAGES 2000
//описываем структуру хранящую информацию о
//занятости страниц в файле
struct file_info{
//отводим по 1 байту для описания состояния страниц
//пока 1 -занята 0 - свободна
unsigned char m_state[MAX_PAGES];
//храния смещение относительно начала файла для
корневой страницы
};
int m_irootoffset;
//смещение начала записи этой структуры в файл
int offset;
42
43. Программная реализация B-дерева.
template <class DATA>class CBTreePage
{
public:
//массив элементов на странице
DATA m_arkeys[ITEM_ON_LEVEL];
//массив смещений на доцерние страницы
int m_arpages[ITEM_ON_LEVEL+1];
//текущее кол-во элементов на странице
int m_ikeys;
//конструктор по умолчанию
CBTreePage();
//метод записи страницы в файл
bool SavePage(fstream &file,int offset);
//метод загрузки страницы из файл
};
bool LoadPage(fstream &file,int offset);
friend class CBTree<DATA>;
43
44. Программная реализация B-дерева.
template <class DATA>class CBTree
{
private:
//смещение корневой страницы
int m_iroot;
//максимальное смещение занимаемое страницами дерева
int max_offset;
//структура описывающая файл текущего дерева
file_info m_finfo;
// колличество страниц
int NumberOfPages;
//используются public методом AddItem
&split);
bool Add(int &root,DATA &item, int &up_page, DATA &up_item,bool
void SplitPage(CBTreePage<DATA> &page, int spot, DATA &up_item,
int &up_page);
//используются public методом DeleteItem
bool DeleteFromPage(int page,DATA &item,bool &too_small);
void SwapItem(CBTreePage<DATA> &root,int key_pos, int child,
bool&too_small);
void TooSmall(CBTreePage<DATA> &parent, int child, int child_num,
44
bool &too_small);
45.
Хеширование данных. Хеш-таблицы.Для ускорения доступа к данным в таблицах баз данных
можно использовать предварительное упорядочивание
таблицы в соответствии со значениями ключей.
Потери времени на повторное упорядочивание таблицы могут
значительно превышать выигрыш от сокращения времени
поиска. Поэтому для сокращения времени доступа к данным в
таблицах часто используется так называемое случайное
упорядочивание или хеширование.
При этом данные организуются в виде таблицы при помощи
хеш-функции h, используемой для “вычисления” адреса по
значению ключа.
Хеш-таблицы - один из наиболее эффективных способов
реализации словарей (словарь - абстрактный тип данных
(множеств) с операторами вставки, удаления и проверки
членства INSERT, DELETE и MEMBER).
45
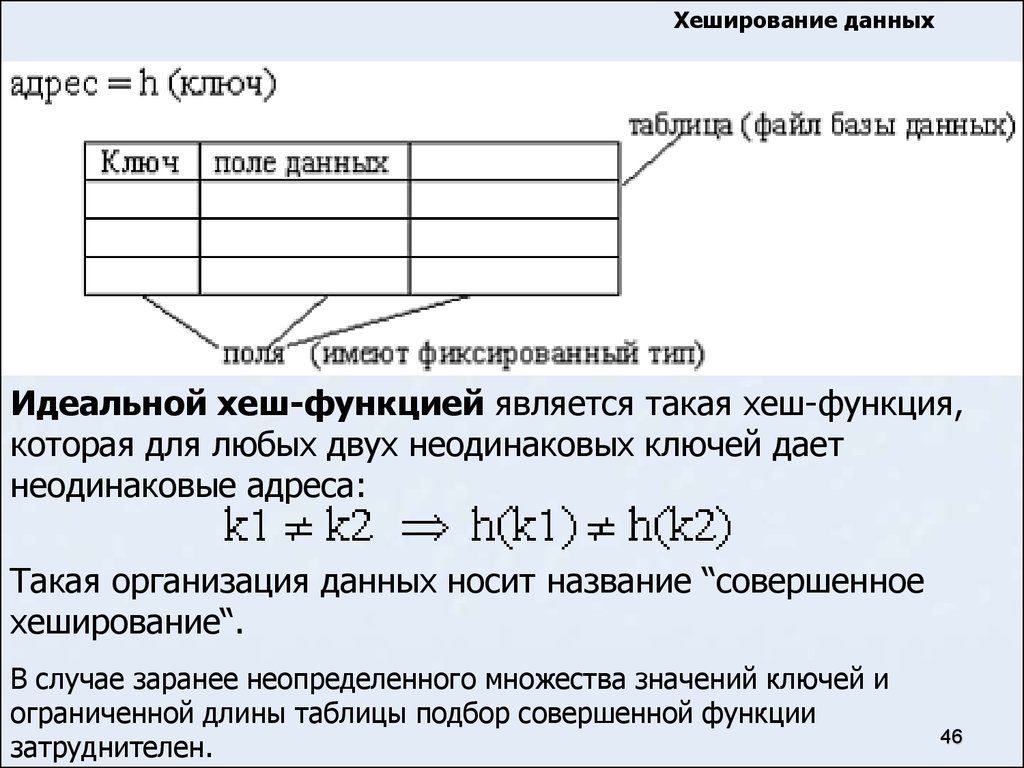
46.
Хеширование данныхИдеальной хеш-функцией является такая хеш-функция,
которая для любых двух неодинаковых ключей дает
неодинаковые адреса:
Такая организация данных носит название “совершенное
хеширование“.
В случае заранее неопределенного множества значений ключей и
ограниченной длины таблицы подбор совершенной функции
затруднителен.
46
47.
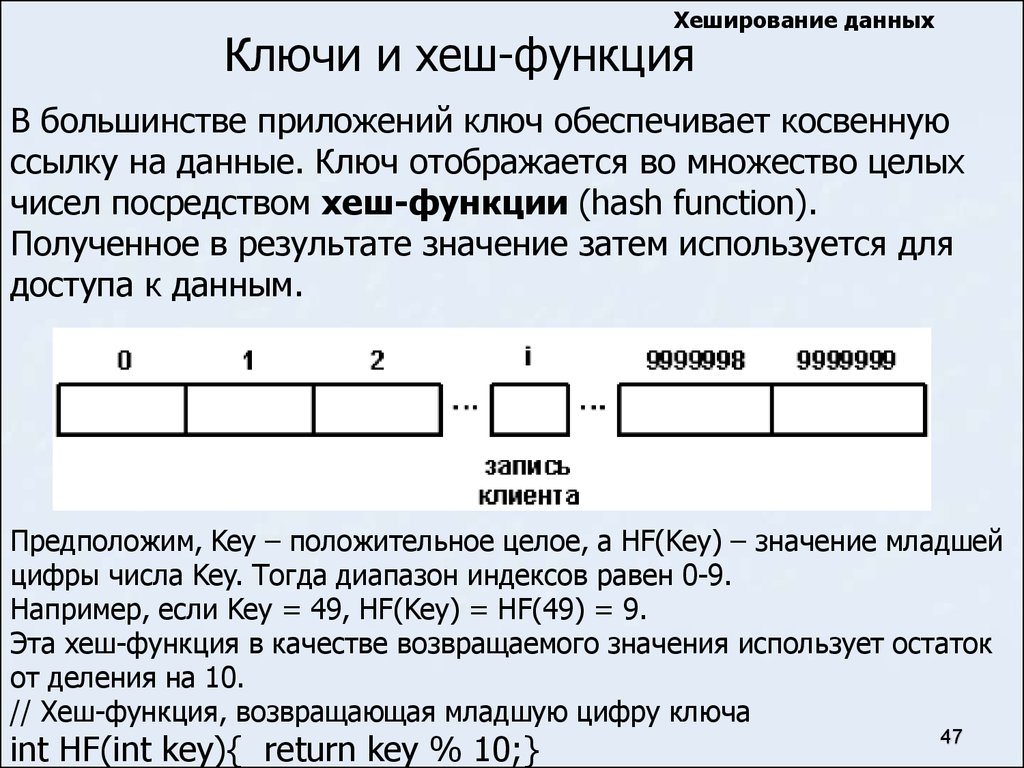
Хеширование данныхКлючи и хеш-функция
В большинстве приложений ключ обеспечивает косвенную
ссылку на данные. Ключ отображается во множество целых
чисел посредством хеш-функции (hash function).
Полученное в результате значение затем используется для
доступа к данным.
Предположим, Key – положительное целое, а HF(Key) – значение младшей
цифры числа Key. Тогда диапазон индексов равен 0-9.
Например, если Key = 49, HF(Key) = HF(49) = 9.
Эта хеш-функция в качестве возвращаемого значения использует остаток
от деления на 10.
// Хеш-функция, возвращающая младшую цифру ключа
int HF(int key){ return key % 10;}
47
48.
Хеширование данныхКоллизии и методы разрешения коллизий
Очевидно, что при заполнении хеш-таблицы могут
возникать ситуации, когда для двух неодинаковых ключей
функция вычисляет один и тот же адрес. Данный случай
носит название “коллизия”, а такие ключи называются
“ключи-синонимы”.
Для разрешения коллизий используются различные методы,
которые в основном сводятся к методам “цепочек“ и
“открытой адресации“.
48
49.
Хеширование данныхКоллизии и методы разрешения коллизий
49
50.
Хеширование данныхКоллизии и методы разрешения коллизий
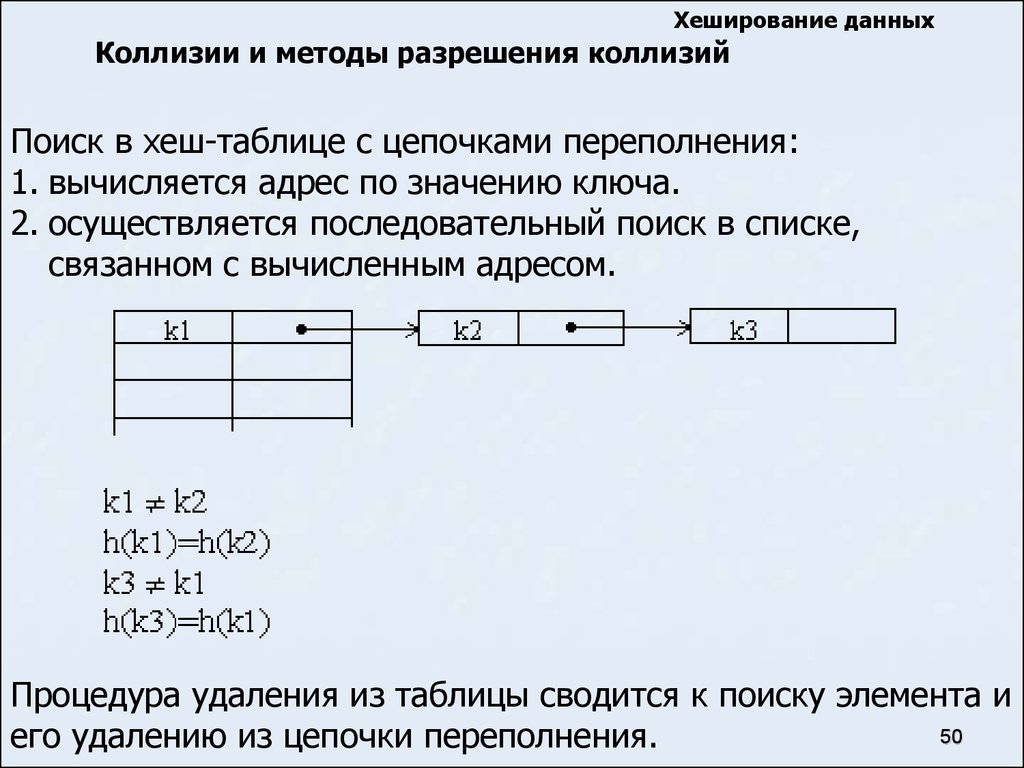
Поиск в хеш-таблице с цепочками переполнения:
1. вычисляется адрес по значению ключа.
2. осуществляется последовательный поиск в списке,
связанном с вычисленным адресом.
Процедура удаления из таблицы сводится к поиску элемента и
50
его удалению из цепочки переполнения.
51.
Хеширование данныхКоллизии и методы разрешения коллизий
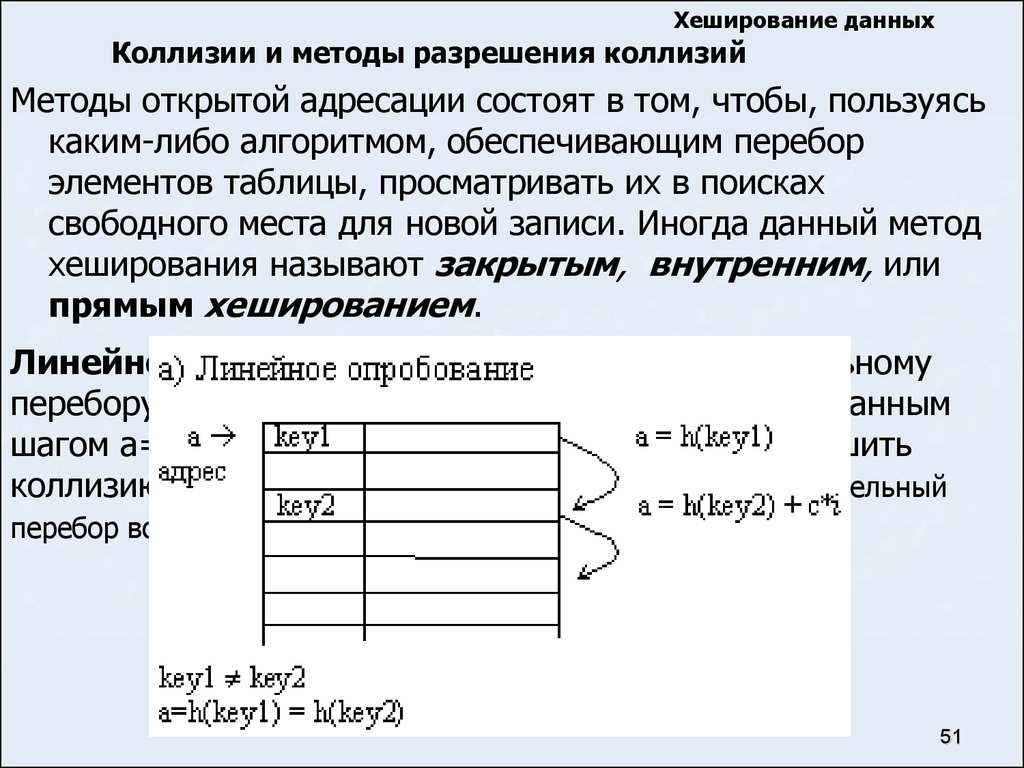
Методы открытой адресации состоят в том, чтобы, пользуясь
каким-либо алгоритмом, обеспечивающим перебор
элементов таблицы, просматривать их в поисках
свободного места для новой записи. Иногда данный метод
хеширования называют закрытым, внутренним, или
прямым хешированием.
Линейное опробование сводится к последовательному
перебору элементов таблицы с некоторым фиксированным
шагом a=h(key) + c*i , где i – номер попытки разрешить
коллизию. При шаге равном единице происходит последовательный
перебор всех элементов после текущего.
51
52.
Хеширование данныхКоллизии и методы разрешения коллизий
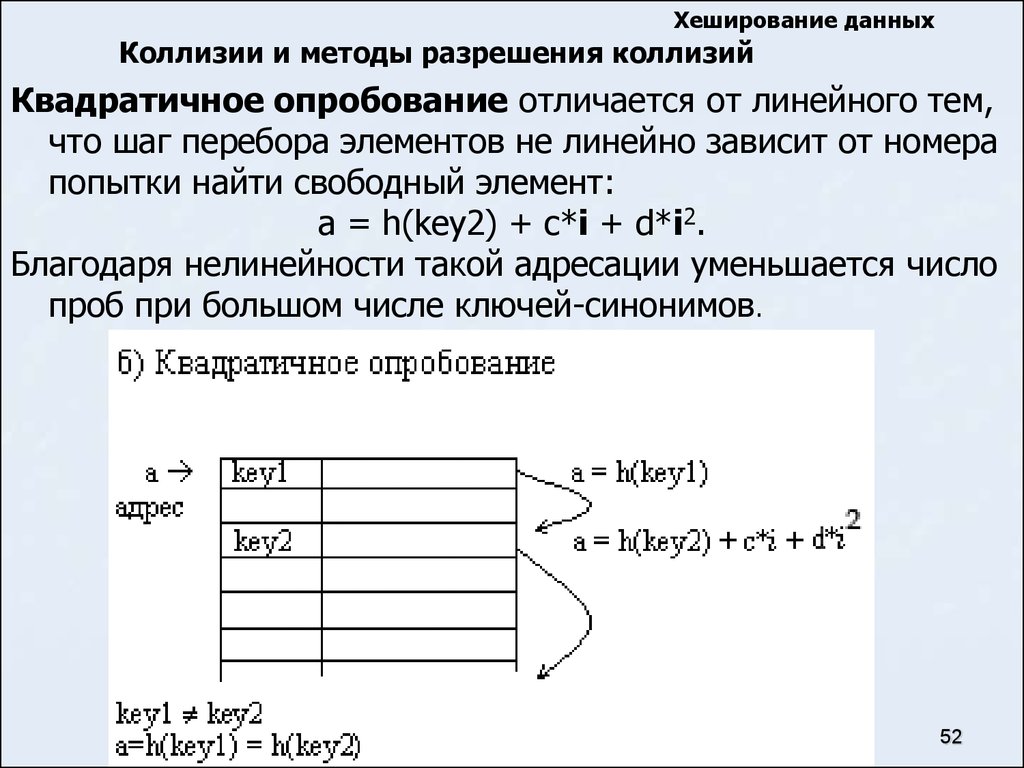
Квадратичное опробование отличается от линейного тем,
что шаг перебора элементов не линейно зависит от номера
попытки найти свободный элемент:
a = h(key2) + c*i + d*i2.
Благодаря нелинейности такой адресации уменьшается число
проб при большом числе ключей-синонимов.
52
53.
Хеширование данныхКоллизии и методы разрешения коллизий
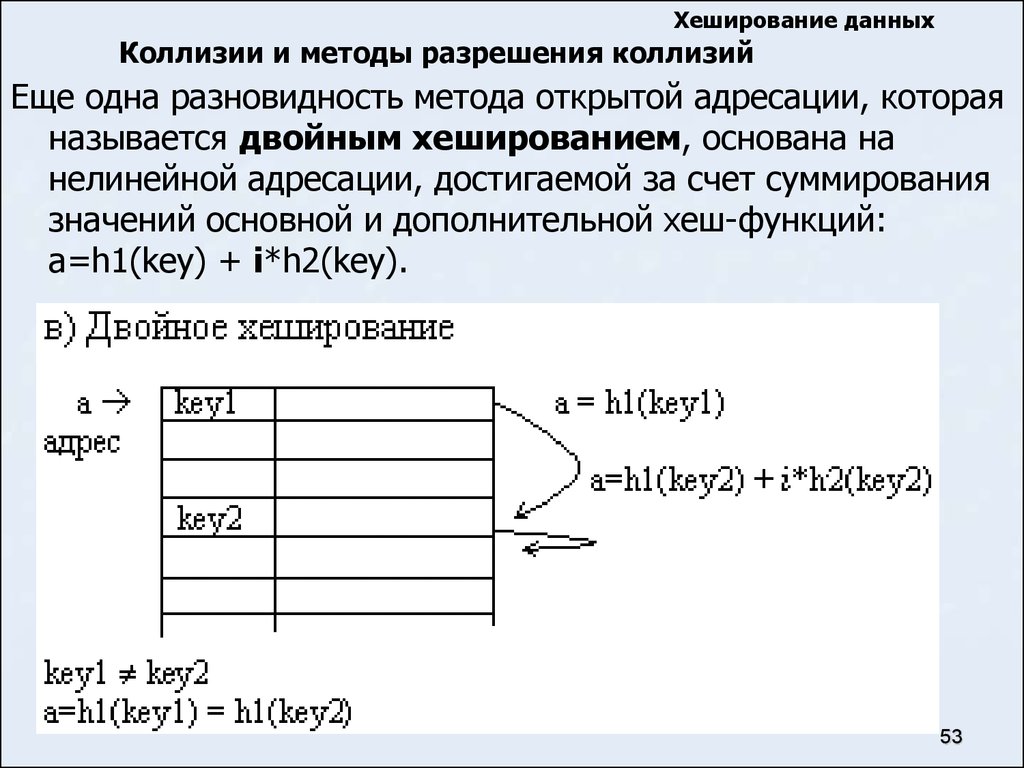
Еще одна разновидность метода открытой адресации, которая
называется двойным хешированием, основана на
нелинейной адресации, достигаемой за счет суммирования
значений основной и дополнительной хеш-функций:
a=h1(key) + i*h2(key).
53
54.
Хеширование данныхКоллизии и методы разрешения коллизий
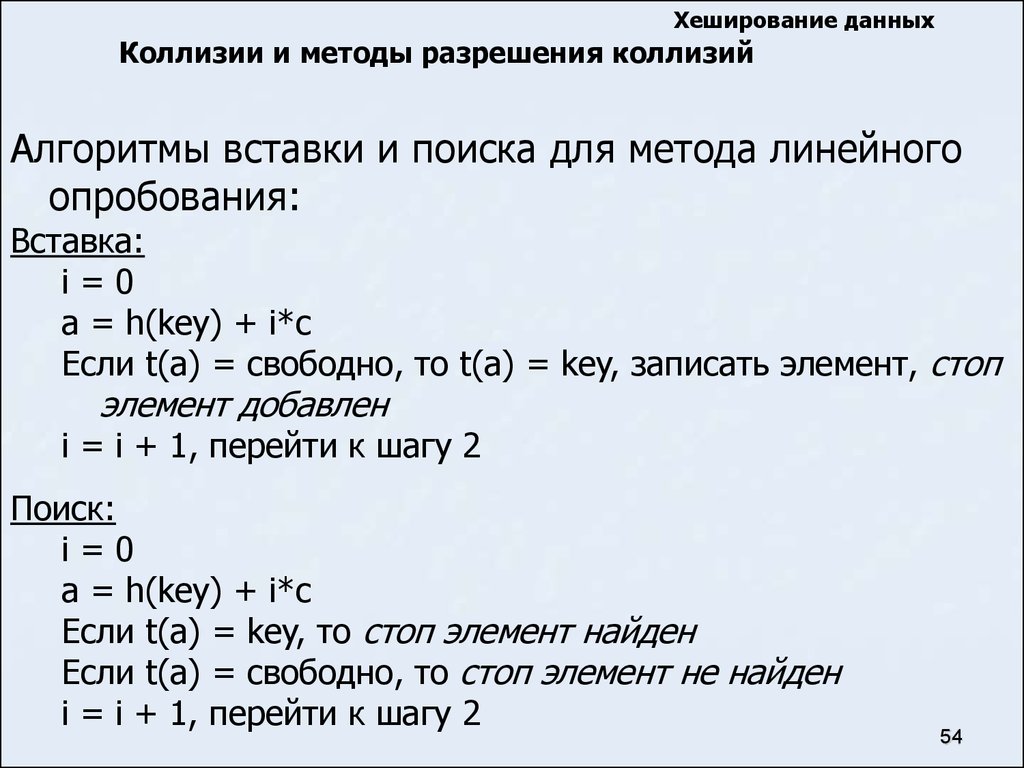
Алгоритмы вставки и поиска для метода линейного
опробования:
Вставка:
i=0
a = h(key) + i*c
Если t(a) = свободно, то t(a) = key, записать элемент, стоп
элемент добавлен
i = i + 1, перейти к шагу 2
Поиск:
i=0
a = h(key) + i*c
Если t(a) = key, то стоп элемент найден
Если t(a) = свободно, то стоп элемент не найден
i = i + 1, перейти к шагу 2
54
55.
Хеширование данныхКоллизии и методы разрешения коллизий
С процедурой удаления дело обстоит не так просто, так как
она в данном случае не будет являться обратной процедуре
вставки.
В том случае, если за удаляемым элементом в результате
разрешения коллизий были размещены элементы с
другими ключами, то поиск этих элементов после
удаления всегда будет давать отрицательный
результат, так как алгоритм поиска останавливается на
первом элементе, находящемся в состоянии свободно.
Скорректировать эту ситуацию можно различными
способами. Наилучший из них состоит в том, что для
элементов хеш-таблицы добавляется состояние
“удалено”. Данное состояние в процессе поиска
интерпретируется, как занято, а в процессе
добавления - как свободно.
55
56.
Хеширование данныхКоллизии и методы разрешения коллизий
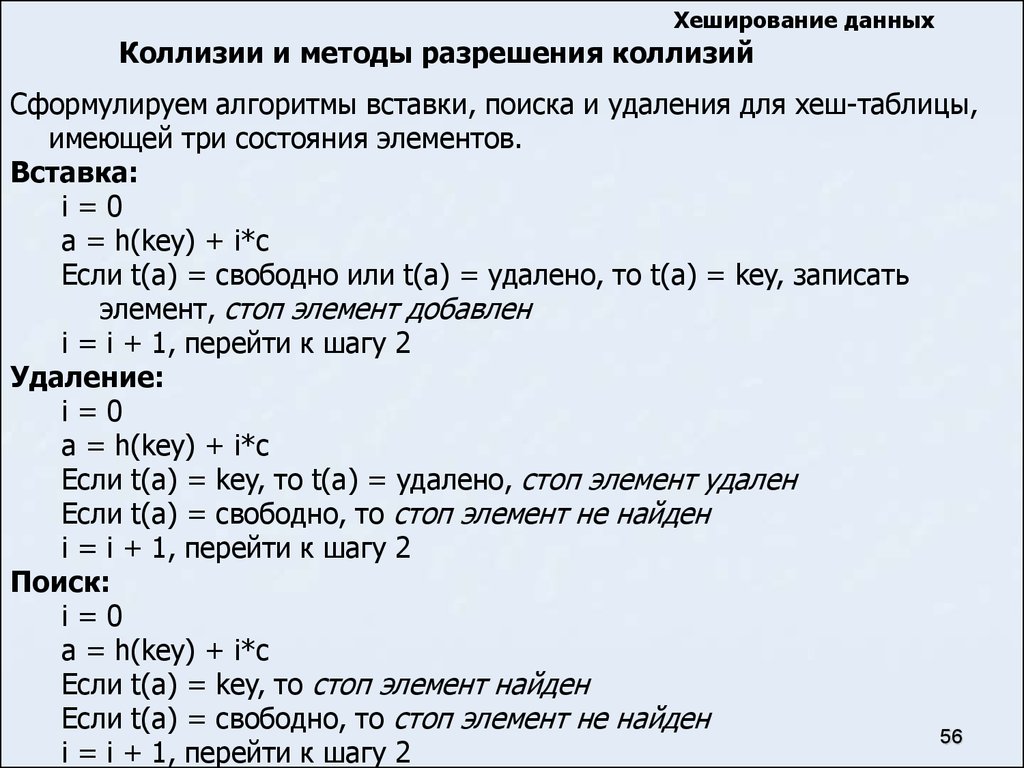
Сформулируем алгоритмы вставки, поиска и удаления для хеш-таблицы,
имеющей три состояния элементов.
Вставка:
i=0
a = h(key) + i*c
Если t(a) = свободно или t(a) = удалено, то t(a) = key, записать
элемент, стоп элемент добавлен
i = i + 1, перейти к шагу 2
Удаление:
i=0
a = h(key) + i*c
Если t(a) = key, то t(a) = удалено, стоп элемент удален
Если t(a) = свободно, то стоп элемент не найден
i = i + 1, перейти к шагу 2
Поиск:
i=0
a = h(key) + i*c
Если t(a) = key, то стоп элемент найден
Если t(a) = свободно, то стоп элемент не найден
56
i = i + 1, перейти к шагу 2
57.
Хеширование данныхПереполнение таблицы и рехеширование
57
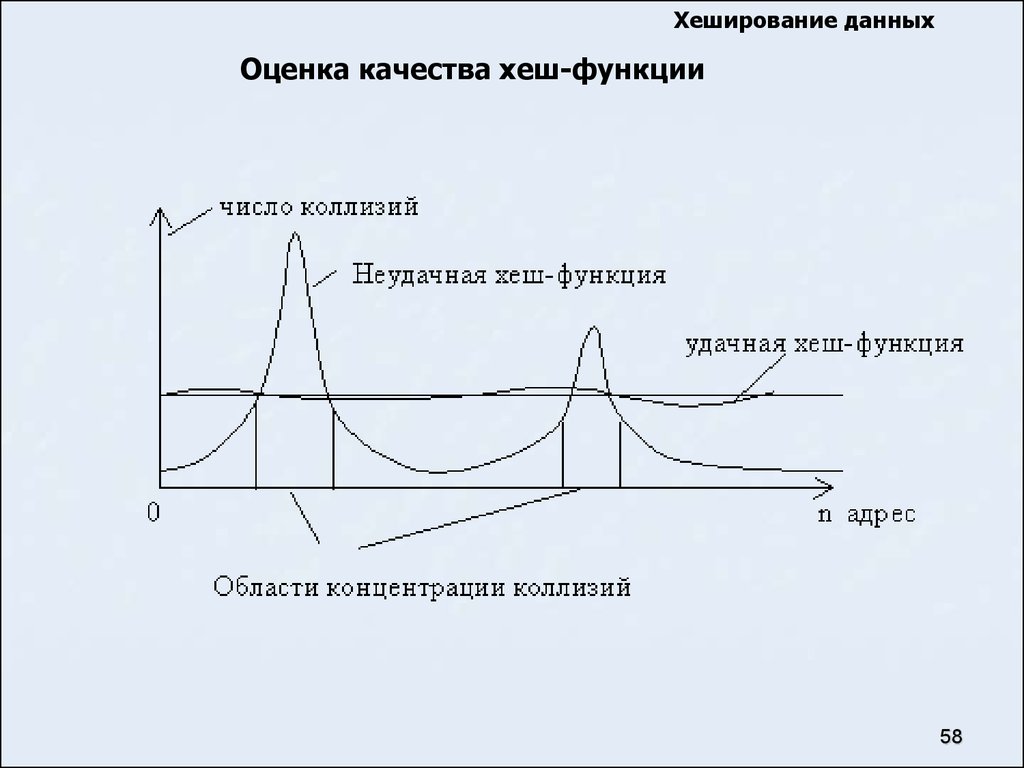
58.
Хеширование данныхОценка качества хеш-функции
58