








 electronics
electronicsSimilar presentations:



")





")
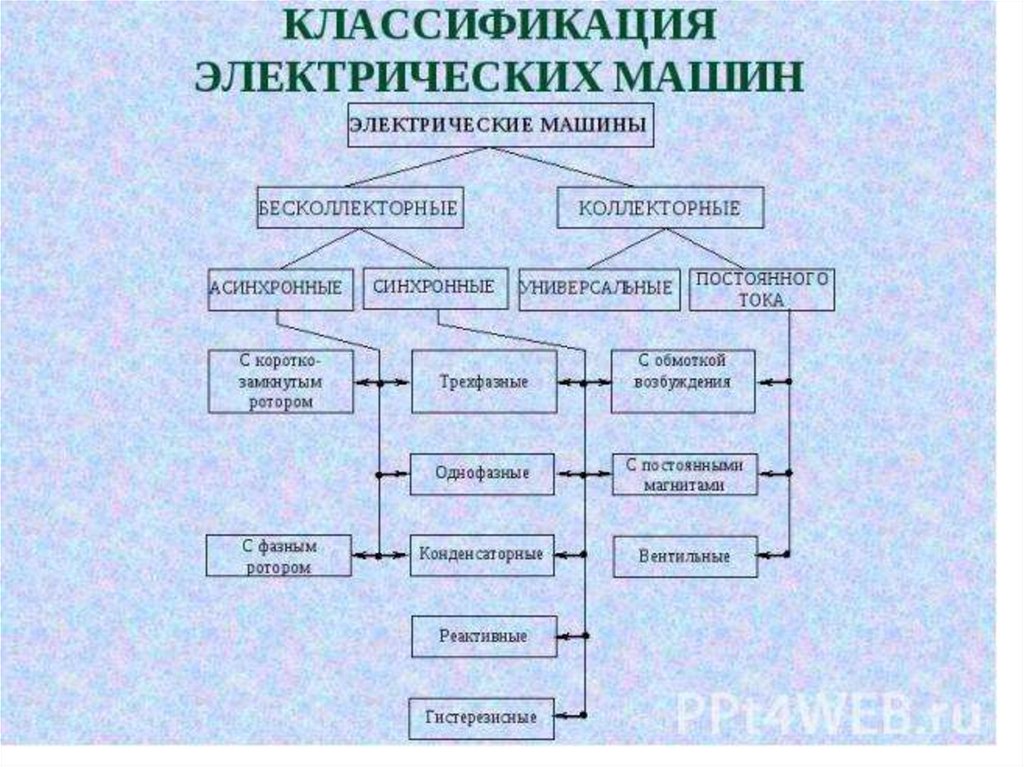
Классификация электрических машин
1.
Электрические машины иаппараты
1
2.
Электрическая машинаЭлектрическая
машина
машина,
служащая
для
преобразования:
механической
энергии
в
электрическую
энергию;
или
электрической
энергии
в
механическую
энергию;
или
- электрической энергии в электрическую энергию, отличающуюся по
напряжению, частоте и другим параметрам.
Действие
электрических
машин основано
на
использовании
явления
электромагнитной индукции и законов, определяющих взаимодействие
электрических токов и магнитных полей.
2
3.
34.
Машиныпеременного
тока
4
5.
Асинхронный электродвигатель — электродвигательпеременного тока, в котором частота вращения ротора
отличается от частоты вращающего магнитного поля,
создаваемого питающим напряжением. Асинхронные
электродвигатели – самые распространенные в мире
благодаря своей относительной простоте и низкой
стоимости. Простота конструкции и высокая надежность
позволяет применять их не только в промышленных
электроустановках (станки, краны, подъемные машины), но
и в бытовых (компрессора холодильников, вентиляторы,
пылесосы). Довольно широкое применение получили
однофазные и двухфазные асинхронные управляемые
электродвигатели, а также сельсины и тахогенераторы
асинхронные.
6.
Синхронный электродвигатель — электродвигатель переменноготока, ротор которого вращается синхронно с магнитным полем
питающего напряжения; Синхронные электродвигатели – наиболее
часто применяемы в качестве генераторов электрического тока на
электрических станциях. Также применимы в качестве генераторов
повышенной частоты в различных источниках питания (например,
на кораблях, тепловозах, самолетах). Также в электроприводах
большой мощности применяют синхронные электродвигатели,
которые могут также помимо выполнения полезной работы и также
влиять на коэффициент мощности сети cos φ. Относительно
электроприводов малой мощности, то там довольно широкое
распространение
получили
реактивные
синхронные
электродвигатели, шаговые, индукторные, с постоянными
магнитами и другие.
6
7.
Однофазные — запускаются вручную, или имеют пусковую обмотку, или имеютфазосдвигающую цепь.
Двухфазные — в том числе конденсаторные.
Трёхфазные
Многофазные
Шаговые двигатели — Электродвигатели, которые имеют конечное число
положений ротора.
Универсальный
коллекторный двигатель (УКД) —Коллекторные машины–
используют их относительно редко и зачастую только в качестве
электродвигателей. Это вызвано сложностью их конструкции, а также в
необходимости довольно тщательного ухода за ними. В бытовых
электроприборах и устройствах автоматики применяются универсальные
коллекторные электродвигатели, способные работать на двух родах тока –
постоянном и переменном.
8.
Электрические микромашиныМикромашины активно применяются в устройствах автоматических. Соответственно
их подразделяют на группы:
Силовые микродвигатели – приводят во вращения механизмы различных
автоматических устройств. Например, самопишущие устройства и другие.
Исполнительные (управляемые) микромашины – выполняют преобразование энергии
электрической в механическую, то есть ведут обработку определенных команд из вне.
Тахогенераторы – преобразуют механическую энергию вращения вала в электрический
сигнал напряжения, который пропорционален скорости вращения вала.
Вращающиеся трансформаторы – на выходе этих трансформаторов устанавливается
напряжение, пропорциональное функции углу поворота ротора, например синусу или
косинусу данного угла или же самому углу.
Машины синхронной связи – (магнесины или сельсины) осуществляют синфазный и
синхронный поворот или же вращения нескольких осей, не имеющих между собой
механической связи.
Микромашины гироскопических приборов – вращают роторы гироскопов с довольно
высокой частотой, а также производят коррекцию их положения.
Электромашинные усилители и преобразователи.
Машины первых двух групп довольно часто называют силовыми, а электродвигатели
третьей – пятой групп информационными.
8
9.
Принцип действияЭлектрическая машина состоит из двух частей:
I неподвижная часть.
II подвижная часть.
В основу работы любой электрической машины положен
принцип электромагнитной индукции. Электрическая
машина состоит из статора или станина (неподвижной
части) и ротора (якоря в случае машины постоянного
тока) (подвижной части). В статоре уложена обмотка, по
которой, создав напряжение, идёт электрический ток.
Этот ток возбуждает магнитное поле машины.
Электромагнитная индукция — явление возникновения
электрического тока в проводнике при изменении
магнитного потока, проходящего через него.
10.
Машиныпостоянного
тока
10
11. Назначение и области применения машин постоянного тока
Машины постоянного тока (МПТ) являются обратимыми, т. е. они могутработать в качестве генератора (ГПТ) или двигателя (ДПТ) без изменения схемы.
Широкое применение ДПТ обусловлено следующими причинами:
• возможность плавного регулирования частоты вращения вала
• хорошие пусковые свойства: большой пусковой момент при сравнительно небольшом
пусковом токе.
ДПТ применяют в электротранспорте, в приводах прокатных станов, в системах
автоматического регулирования и др. ГПТ используют в качестве возбудителей для
питания обмоток возбуждения мощных синхронных машин, цеховых сетей постоянного
тока, в частности, для питания ДПТ, электромагнитов, для питания электролитических
ванн, зарядки аккумуляторов, сварки, в качестве датчиков частоты вращения и др.
Основной недостаток МПТ - наличие щёточно-коллекторного узла, который требует
тщательного ухода в эксплуатации и снижает надёжность машин. Кроме того, для питания
ДПТ требуются источники постоянного тока (ГПТ или выпрямители).
11
12.
Преимущества МПТГПТ
- жесткая внешняя характеристика,
- хорошие регулировочные свойства,
ДПТ
- лучшие механические характеристики,
- лучшие регулировочные свойства,
- высокая перегрузочная способность
12
13.
Общие недостатки МПТ- сложность конструкции,
- невозможность работы в агрессивных
средах,
- необходимость частых ревизий,
- меньший срок службы,
- наличие радиопомех.
13
14.
Устройствомашины
постоянного тока
14
15.
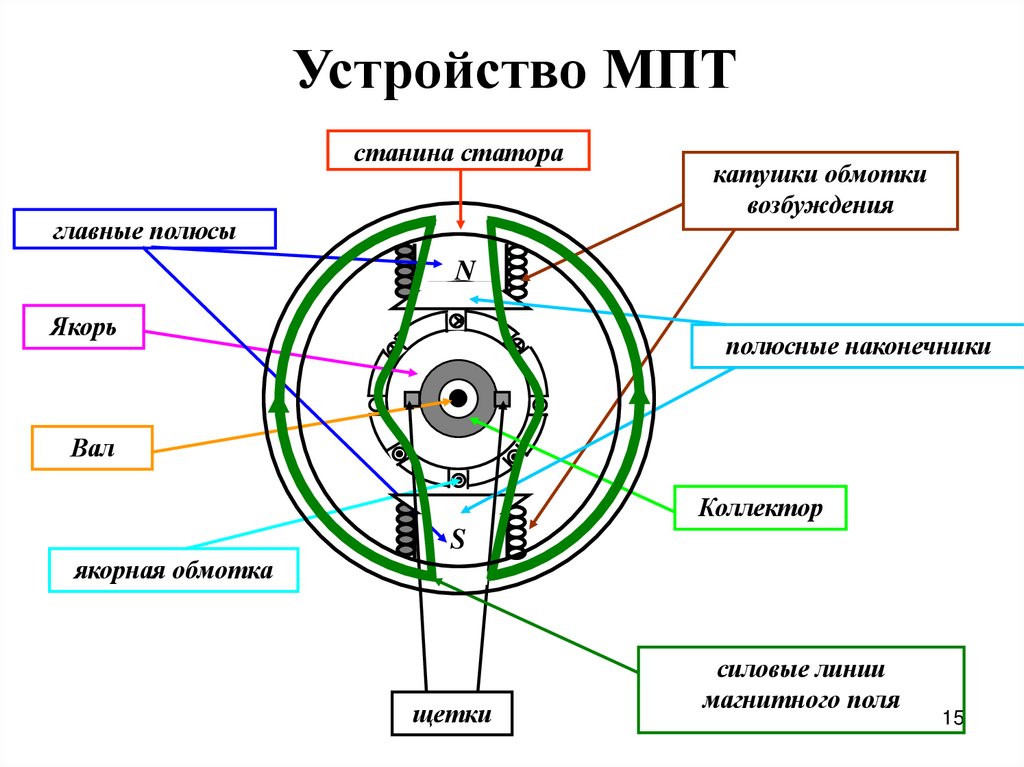
Устройство МПТстанина статора
главные полюсы
катушки обмотки
возбуждения
N
Якорь
полюсные наконечники
Вал
Коллектор
S
якорная обмотка
щетки
силовые линии
магнитного поля
15
16.
Главный полюс состоит из сердечника и обмоткивозбуждения, которая питается либо от источника
постоянного тока, либо от зажимов якорной
обмотки.
16
17.
Устройство статора (индуктора)Статор (индуктор) - это стальной цилиндр, внутри которого
крепятся главные полюса с полюсными наконечниками, образуя
вместе с корпусом магнитопровод машины. Полюсные наконечники
служат для равномерного распределения магнитной индукции в
зазоре между полюсами статора-индуктора и якоря. На главных
полюсах расположены последовательно соединённые катушки
обмотки возбуждения, предназначенные для создания
неподвижного магнитного потока Фв машины.
Концы Ш1 и Ш2 обмотки возбуждения (ОВ) выводят на клеммный
щиток, расположенный на корпусе машины. Помимо основных
полюсов внутри статора располагают дополнительные полюса с
обмотками, которые служат для уменьшения искрения в скользящих
контактах (между щётками и коллектором).
17
18. Устройство якоря
Якорь (подвижная часть машины) - это цилиндр, набранный излистов электротехнической стали, снаружи которого имеются пазы, в
которые уложена якорная обмотка. Отводы обмотки якоря (ОЯ)
припаивают
к
пластинам
коллектора,
расположенного
на
вращающемся в подшипниках валу.
Коллектор представляет собой цилиндр, набранный из медных
пластин, изолированных друг от друга и от вала. Коллектор играет
роль механического выпрямителя переменной ЭДС, индуктируемой в
обмотке якоря. К коллектору с помощью пружин прижимаются
неподвижные
медно-графитовые
щётки,
соединённые
с
клеммами Я1 и Я2 щитка. Образовавшиеся скользящие контакты
дают возможность соединить вращающуюся ОЯ с внешней
электрической цепью (снять выпрямленное напряжение с коллектора
(генераторный режим) или соединить якорную обмотку с источником
постоянного напряжения и распределить токи в стержнях ОЯ таким
образом, чтобы их направления под разноименными полюсами были
бы
противоположными
(двигательный
режим)).
Суммарное
сопротивление
цепи
якоря
Rя
=
0,5…5
Ом.
18
19.
К каждой пластине коллектора присоединяются два концасекции обмотки якоря. На коллекторе, в щеткодержателях,
устанавливаются неподвижные щетки, через которые
обмотка якоря соединяется с внешней цепью.
20. Причины искрения
Механические причины:
Эллиптическая форма коллектора;
Выступление коллекторных пластин;
Недостаточная балансировка коллектора;
Вибрация щеток
Электрические причины:
Повышение напряжения между коллекторными
пластинами выше допускаемого предела.
Повышение напряжения и плотности тока в момент
разрыва контура между щеткой и коллекторной
пластиной.
21. Схемы возбуждения МПТ
В зависимости от того, как обмотка возбуждения включена относительносети якоря, различают МПТ независимого возбуждения (ОВ к якорю не
подключена) и МПТ с самовозбуждением, которое подразделяется на
параллельное, последовательное и смешанное.
а) независимого, б) параллельного, в) последовательного и
г) смешанного возбуждения МПТ
22. Типы машин постоянного тока
• независимого возбуждения (ОВ подключаетсяк постороннему источнику);
• параллельного возбуждения (ОВ
подсоединяется параллельно ОЯ);
• последовательного возбуждения (ОВ
включается последовательно с ОЯ);
23. Пуск двигателя
Возможны три способа пуска двигателя:1) прямой, при котором ОЯ подключается
прямо к сети;
2) реостатный с помощью пускового реостата
(включается последовательно в цепь якоря);
3) при пониженном напряжении, подводимом к
якорю.
24. Способы регулирования частоты вращения
• реостатный –изменение суммарногосопротивления цепи якоря;
• полюсной – изменение магнитного
потока полюсов;
• якорный – изменение напряжения,
подводимого к якорю
25.
Характеристика холостого ходаEя = Ux = f(Iв) (n = const; I = 0) снимается при разомкнутой цепи
приёмника и показывает, как нужно изменять ток возбуждения Iв
посредством реостата Rр, чтобы получить те или иные значения ЭДС Eя
генератора.
Внешняя характеристика U = f(I), представляющая собой зависимость
напряжения U на выводах генератора от тока нагрузки I при n = const и Iв
= const.
Регулировочной характеристикой называют характеристику
Iв = f(I) при n = const и U = const. Она показывает, как следует изменять
ток возбуждения, чтобы поддерживать постоянным напряжение U
генератора при изменении нагрузки (тока I).
26.
Электромеханические свойства ДПТ определяются егоскоростной n(Iя) или механической n(M)
характеристиками.
Скоростная характеристика представляет зависимость
частоты вращения n от тока якоря Iя при U = const и Iв =
const.
Уравнение естественной скоростной характеристики
получают из рассмотренного выше выражения тока якоря,
решив его относительно частоты вращения,
n = (U - RяIя)/(CЕФв) = (U/CЕФв) - (Rя/CЕФв)Iя.
26
27.
Механическая характеристика n(M) представляет зависимостьчастоты вращения якоря n от развиваемого ДПТ момента М = Мс при
условии постоянства напряжения U сети и сопротивлений в цепи
якоря и в цепи возбуждения.
Заменив ток Iя в выражении скоростной характеристики значением из
выражения вращающего момента М = СMIяФв, получим уравнение
естественной механической характеристики
n = (U/CЕФв) - (Rя/СЕСМФв2)M = n0 - n,
где n0 = U/CEФв - частота вращения якоря при "идеальном" холостом
ходе (Мс = 0); сопротивления Rп = 0 и Rр = 0;
напряжение на якоре U = Uн и магнитный поток двигателя
Фв = Фвн.
27
28.
Естественная механическая характеристика n(M) ДПТпараллельного возбуждения является жесткой, т. к.
снижение частоты вращения n при моменте
сопротивления на валу М = Мсн составляет (3…7)% от
n0.
Если сопротивление пускового реоостата Rп > 0
(Rр = 0), получают искусственные, т. н. реостатные
механические характеристики 2…4 (рис. 9.6, в),
проходящие через точку n0 - частоту вращения ХХ
двигателя. Чем больше сопротивление Rп, тем
характеристика круче.
28
29. Способы регулирования частоты вращения и реверсирование ДПТ параллельного возбуждения
Из рассмотрения механических характеристик двигателя следует, чтопри моменте М = Мс = const частоту вращения якоря
n = U/(CEФв) - ((Rя + Rn)/(CECMФв2))M = n0 - n
можно регулировать тремя способами:
• реостатным - изменением сопротивления цепи якоря
(Rя+ Rп = var);
• полюсным - изменением магнитного потока полюсов
(Rв + Rр = var);
• якорным - изменением напряжения, подводимого к якорю
(U = var).
Реверсирование двигателей можно обеспечить изменением
направления тока или в обмотке якоря, или в обмотке возбуждения
29