






Similar presentations:




")





Модуль_2_Принцип_работы_и_управление_РУС_TEC
1. Роторная управляемая система «TEC» Top of energy technology China
РОТОРНАЯ УПРАВЛЯЕМАЯСИСТЕМА
«TEC» TOP OF ENERGY TECHNOLOGY CHINA
МОДУЛЬ 2. Принцип работы и управление РУС
ООО «Инженерно-технологический
сервис»
Вагапов Роберт Раисович
vagapov.ror@gazprom-neft.ru
15.05.2025
v1.0
2.
Регламент работы8:30
Начало работы
10:15−10:30
Перерыв
12:00–13:30
Обед
15:15–15:30
Перерыв
17:30
Окончание работы
ГАЗПРОМ НЕФТЬ
2
3.
Правило работы на тренинге1
2
3
4
Быть активным,
но – никого не принуждают говорить.
Правило шведского стола –
каждый берет то, что ему кажется
ценным и подходящим.
Дать высказаться другому –
говорить по одному.
Учитывать интересы
других участников.
5
6
7
8
Учиться здесь и сейчас =
«Ошибок нет, есть обратная связь»
Приходить с перерывов
вовремя
Ставить мобильные телефоны
в виброрежим.
Задавать вопросы
«Глупых вопросов не существует»
ГАЗПРОМ НЕФТЬ
3
4.
Роторная управляема система Принцип работыПо принципу управления роторные управляемые системы делятся на две группы
• Point the bit - Направление долота отклонение оси долота от оси инструмента в основном за счет изгибания валов,
на которых установлено долото, либо за счет зарычаживания вала относительно точки опоры.
Примеры таких РУС «Schlumberger Power Drive exceed», «Halliburton GeoPilot», «Weatherford Revolution»
• Push the bit - Направление долота происходит за счет лопастей, которые выдвигаясь из тела прибора отталкивают
долото от оси инструмента. Примеры таких РУС «Schlumberger PowerDrive X6/Orbit», «Baker Hughes AutoTrak G3», «TEC»
Считается что несмотря на выдвижные ребра «Baker Hughes AutoTrak G3» по похожему принципу работает «TEC»
не относится ни к одной из групп так как гибкий патрубок находящийся в составе КНБК имеет возможность изгибаться
создавая эффект зарычаживания, тем самым увеличивая возможную интенсивность. А постоянно выдвинутые ребра
вне зависимости от заданной команды, если это не (Ribs Off) позволяют контролировать процесс управления в 100%
времени, в отличии от РУС Schlumberger PowerDrive X6/Orbit, где работа производится циклично. Поэтому его принцип
работы называют «Continuous Proportional Steering» (непрерывно контролируемое соразмерное управление)
ГАЗПРОМ НЕФТЬ 4
5.
Роторная управляема система Принцип работыПринцип работы
В начале создания искривления в стволе скважины РУС «TEC» работает при помощи отклоняющих ребер и выступает
как система отклонения долота, но после того, как верхняя точка опоры (стабилизатор над управляющим модулем)
заходит в искривленный участок, геометрия трех точек касания зарычаживает КНБК на этих точках и создает
определенный изгиб КНБК, который работает по принципу направления долота.
ГАЗПРОМ НЕФТЬ 5
6.
Роторная управляема система Принцип работыОт каких факторов зависит получаемая интенсивность
Работа бокового вооружения долота (Агрессивность долота)
• Усилие по отклонению долота от оси инструмента при помощи выдвижения
гидравлических ребер.
• Изгибание КНБК выше точки опоры (КЛС над управляющим модулем РУС),
гибкость КНБК
• Соответствие диаметров скважины и калибраторов, свойства горных пород,
технологические режимы бурения.
ГАЗПРОМ НЕФТЬ 6
7.
Роторная управляема система Принцип работыВ работе РУС «TEC» можно выделить два контура управления – большой и малый
• В малом контуре процессы происходят в автоматическом режиме и не зависят от оператора.
Сам управляющий модуль производит расчет требуемых параметров, которые необходимо приложить к
гидравлическим ребрам, для выполнения заложенных установок.
ГАЗПРОМ НЕФТЬ 7
8.
Роторная управляема система Принцип работыВ работе РУС «TEC» можно выделить два контура управления – большой и малый
• В большом контуре управления осуществляется коммуникация забойного оборудования и наземной системы.
Эта коммуникация двусторонняя: оборудование передает свое состояние в виде гидроимпульсного сигнала, а оператор
управляет оборудованием путем отправки команд. Команды представляют собой модуляцию потока бурового раствора,
изменения потока, созданные на поверхности, считываются забойным оборудованием, декодируются и отрабатываются.
После получения команды забойная система выдает подтверждение о получении команды, что дает оператору
уверенность в корректной работе оборудования.
ГАЗПРОМ НЕФТЬ 8
9.
Роторная управляема система. Режимы работыРоторная управляемая система имеет несколько режимов работы
Ribs Off (режим сложенных ребер)
Center Mode (режим центратора)
Steer Mode Работа по целевому вектору «Steer Direction» с заданной силой «Steer Force» «Ручное управление»
Inclination Hold Mode (режим удержания зенитного угла) или «Автоматическое управление»
Vertical Orientation Mode (Режим удержания вертикали) на текущий момент режим не работает, находится в разработке
ГАЗПРОМ НЕФТЬ 9
10.
Роторная управляема система, Принцип работы управляющегомодуля
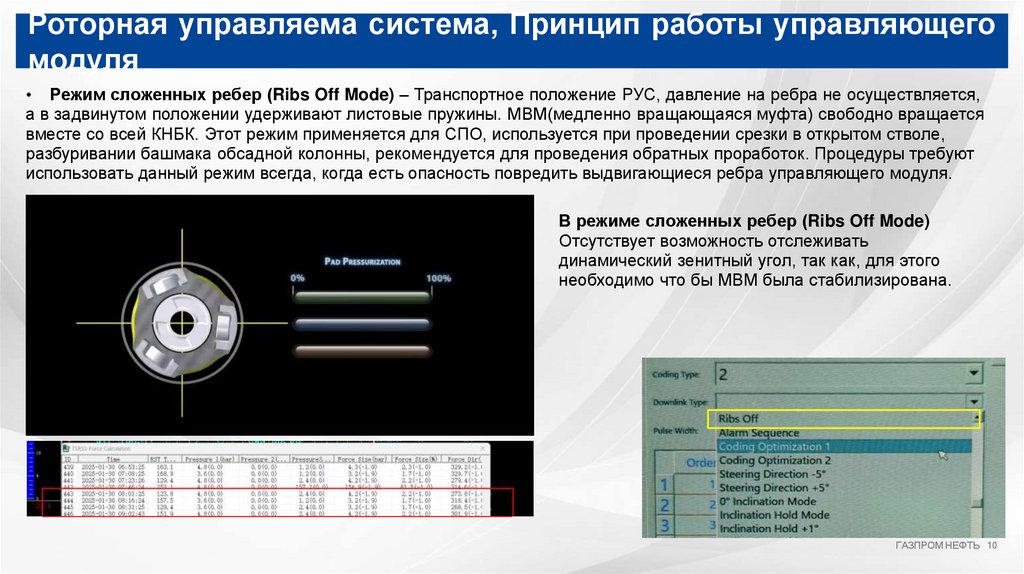
• Режим сложенных ребер (Ribs Off Mode) – Транспортное положение РУС, давление на ребра не осуществляется,
а в задвинутом положении удерживают листовые пружины. МВМ(медленно вращающаяся муфта) свободно вращается
вместе со всей КНБК. Этот режим применяется для СПО, используется при проведении срезки в открытом стволе,
разбуривании башмака обсадной колонны, рекомендуется для проведения обратных проработок. Процедуры требуют
использовать данный режим всегда, когда есть опасность повредить выдвигающиеся ребра управляющего модуля.
В режиме сложенных ребер (Ribs Off Mode)
Отсутствует возможность отслеживать
динамический зенитный угол, так как, для этого
необходимо что бы МВМ была стабилизирована.
ГАЗПРОМ НЕФТЬ 10
11.
Роторная управляема система Принцип работы управляющегомодуля
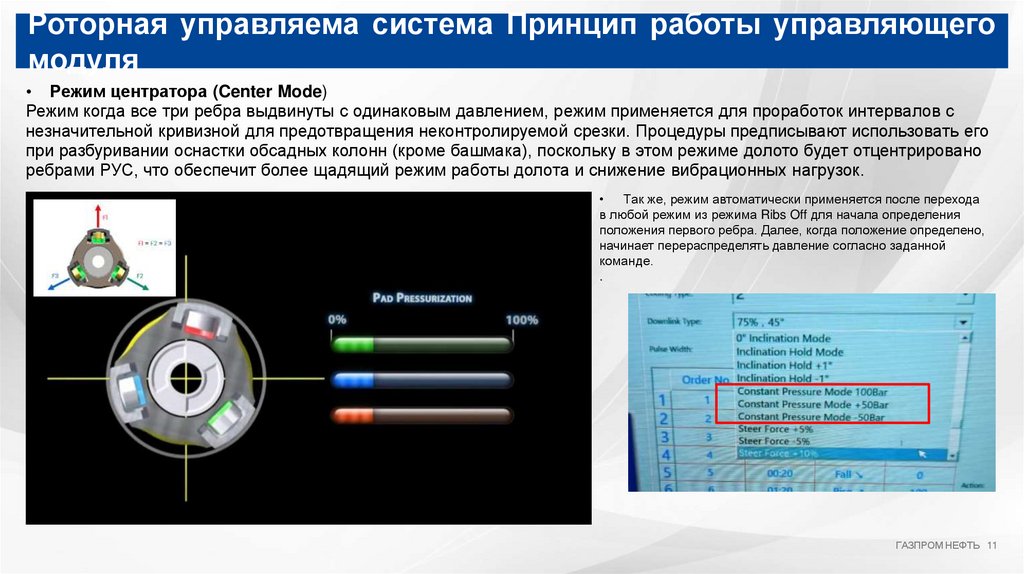
• Режим центратора (Center Mode)
Режим когда все три ребра выдвинуты с одинаковым давлением, режим применяется для проработок интервалов с
незначительной кривизной для предотвращения неконтролируемой срезки. Процедуры предписывают использовать его
при разбуривании оснастки обсадных колонн (кроме башмака), поскольку в этом режиме долото будет отцентрировано
ребрами РУС, что обеспечит более щадящий режим работы долота и снижение вибрационных нагрузок.
Так же, режим автоматически применяется после перехода
в любой режим из режима Ribs Off для начала определения
положения первого ребра. Далее, когда положение определено,
начинает перераспределять давление согласно заданной
команде.
.
ГАЗПРОМ НЕФТЬ 11
12.
Роторная управляема система Принцип работы управляющегомодуля
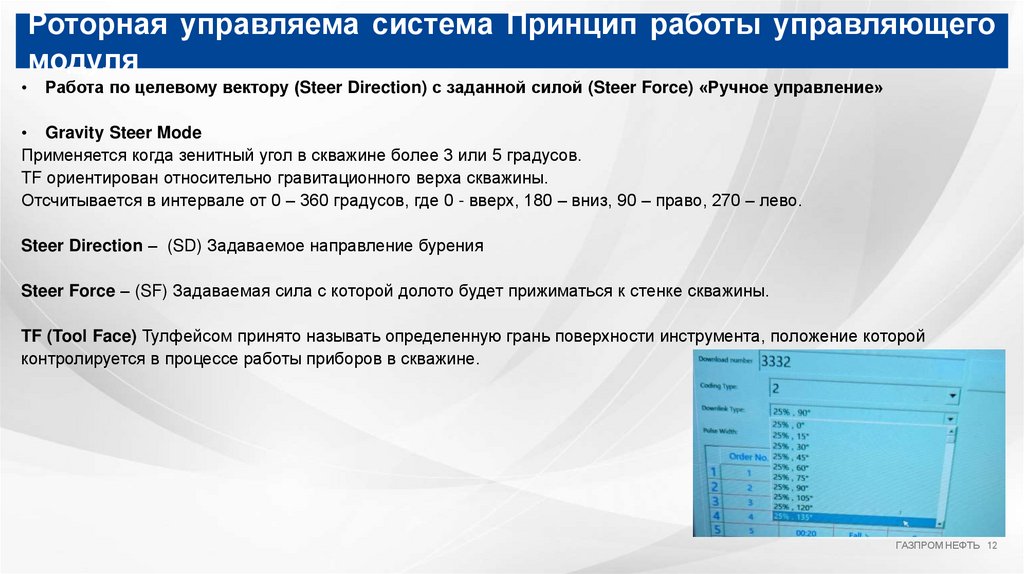
Работа по целевому вектору (Steer Direction) с заданной силой (Steer Force) «Ручное управление»
• Gravity Steer Mode
Применяется когда зенитный угол в скважине более 3 или 5 градусов.
TF ориентирован относительно гравитационного верха скважины.
Отсчитывается в интервале от 0 – 360 градусов, где 0 - вверх, 180 – вниз, 90 – право, 270 – лево.
Steer Direction – (SD) Задаваемое направление бурения
Steer Force – (SF) Задаваемая сила с которой долото будет прижиматься к стенке скважины.
TF (Tool Face) Тулфейсом принято называть определенную грань поверхности инструмента, положение которой
контролируется в процессе работы приборов в скважине.
ГАЗПРОМ НЕФТЬ 12
13.
Роторная управляема система Принцип работы управляющегомодуля
Работа по целевому вектору (Steer Direction) с заданной силой (Steer Force) «Ручное управление»
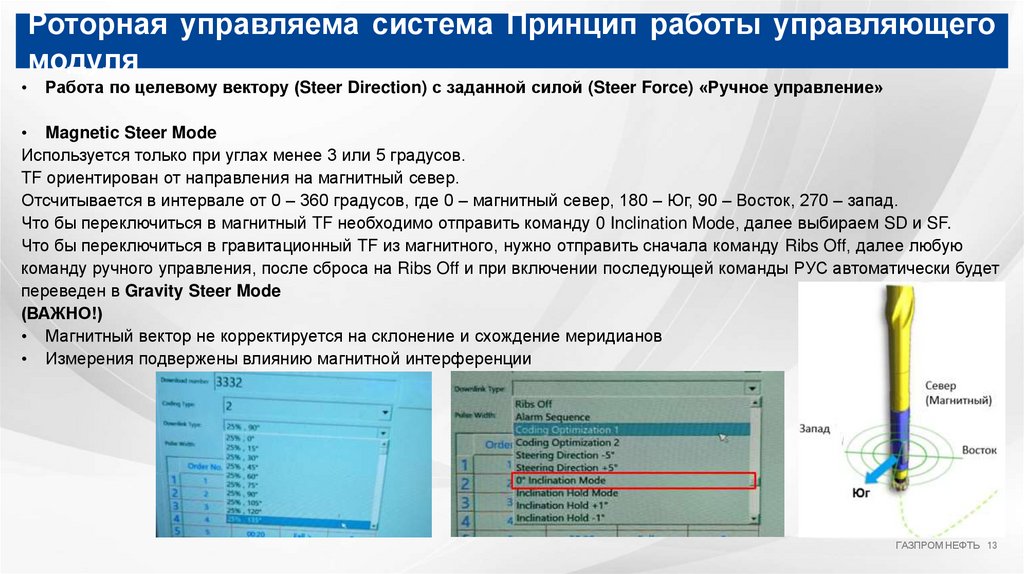
• Magnetic Steer Mode
Используется только при углах менее 3 или 5 градусов.
TF ориентирован от направления на магнитный север.
Отсчитывается в интервале от 0 – 360 градусов, где 0 – магнитный север, 180 – Юг, 90 – Восток, 270 – запад.
Что бы переключиться в магнитный TF необходимо отправить команду 0 Inclination Mode, далее выбираем SD и SF.
Что бы переключиться в гравитационный TF из магнитного, нужно отправить сначала команду Ribs Off, далее любую
команду ручного управления, после сброса на Ribs Off и при включении последующей команды РУС автоматически будет
переведен в Gravity Steer Mode
(ВАЖНО!)
• Магнитный вектор не корректируется на склонение и схождение меридианов
• Измерения подвержены влиянию магнитной интерференции
ГАЗПРОМ НЕФТЬ 13
14.
Роторная управляема система Принцип работы управляющегомодуля
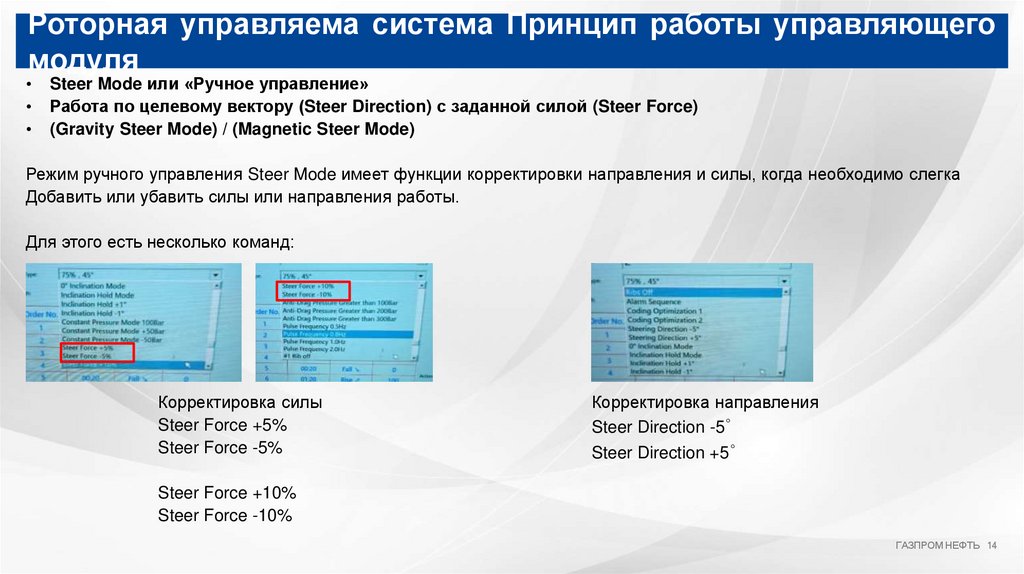
Steer Mode или «Ручное управление»
Работа по целевому вектору (Steer Direction) с заданной силой (Steer Force)
(Gravity Steer Mode) / (Magnetic Steer Mode)
Режим ручного управления Steer Mode имеет функции корректировки направления и силы, когда необходимо слегка
Добавить или убавить силы или направления работы.
Для этого есть несколько команд:
Корректировка силы
Steer Force +5%
Steer Force -5%
Корректировка направления
Steer Direction -5˚
Steer Direction +5˚
Steer Force +10%
Steer Force -10%
ГАЗПРОМ НЕФТЬ 14
15.
Роторная управляема система Принцип работы управляющегомодуля
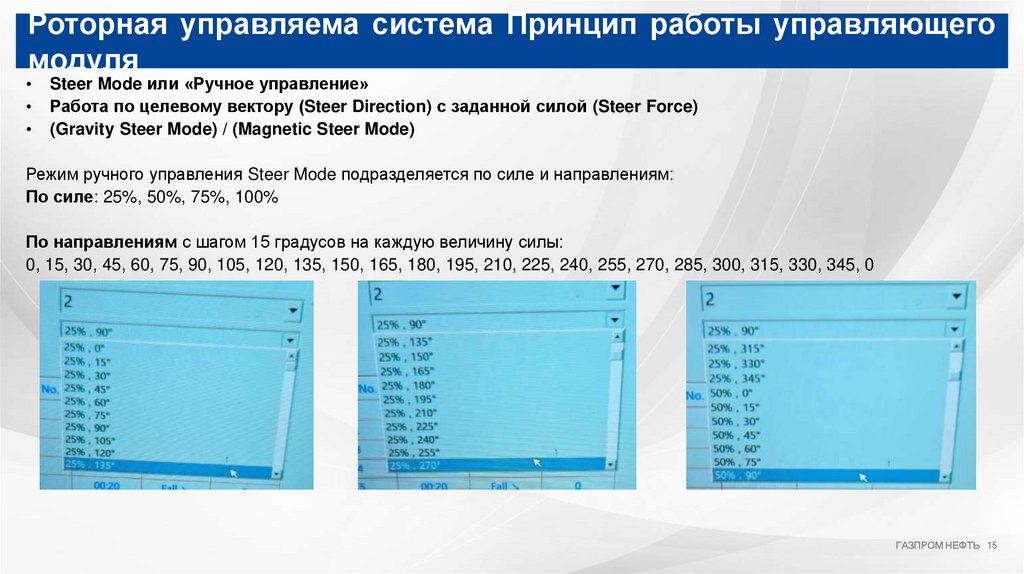
Steer Mode или «Ручное управление»
Работа по целевому вектору (Steer Direction) с заданной силой (Steer Force)
(Gravity Steer Mode) / (Magnetic Steer Mode)
Режим ручного управления Steer Mode подразделяется по силе и направлениям:
По силе: 25%, 50%, 75%, 100%
По направлениям с шагом 15 градусов на каждую величину силы:
0, 15, 30, 45, 60, 75, 90, 105, 120, 135, 150, 165, 180, 195, 210, 225, 240, 255, 270, 285, 300, 315, 330, 345, 0
ГАЗПРОМ НЕФТЬ 15
16.
Роторная управляема система Принцип работы управляющегомодуля
• Steer Mode или «Ручное управление»
• Работа по целевому вектору (Steer Direction) с заданной силой (Steer Force)
• (Gravity Steer Mode) / (Magnetic Steer Mode)
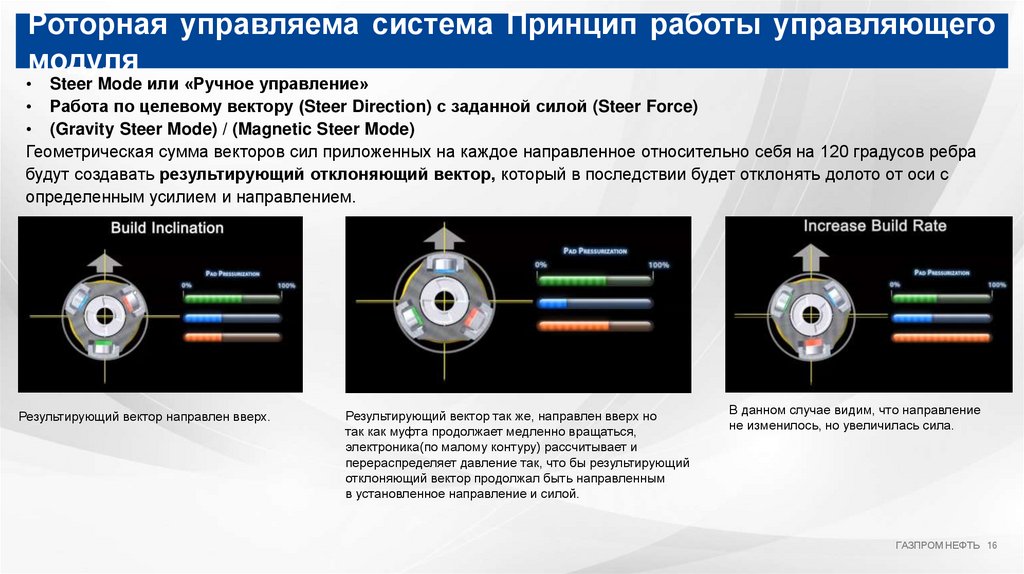
Геометрическая сумма векторов сил приложенных на каждое направленное относительно себя на 120 градусов ребра
будут создавать результирующий отклоняющий вектор, который в последствии будет отклонять долото от оси с
определенным усилием и направлением.
Результирующий вектор направлен вверх.
Результирующий вектор так же, направлен вверх но
так как муфта продолжает медленно вращаться,
электроника(по малому контуру) рассчитывает и
перераспределяет давление так, что бы результирующий
отклоняющий вектор продолжал быть направленным
в установленное направление и силой.
В данном случае видим, что направление
не изменилось, но увеличилась сила.
ГАЗПРОМ НЕФТЬ 16
17.
Роторная управляема система Принцип работы управляющегомодуля
• Steer Mode или «Ручное управление»
• Работа по целевому вектору (Steer Direction) с заданной силой (Steer Force)
• (Gravity Steer Mode) / (Magnetic Steer Mode)
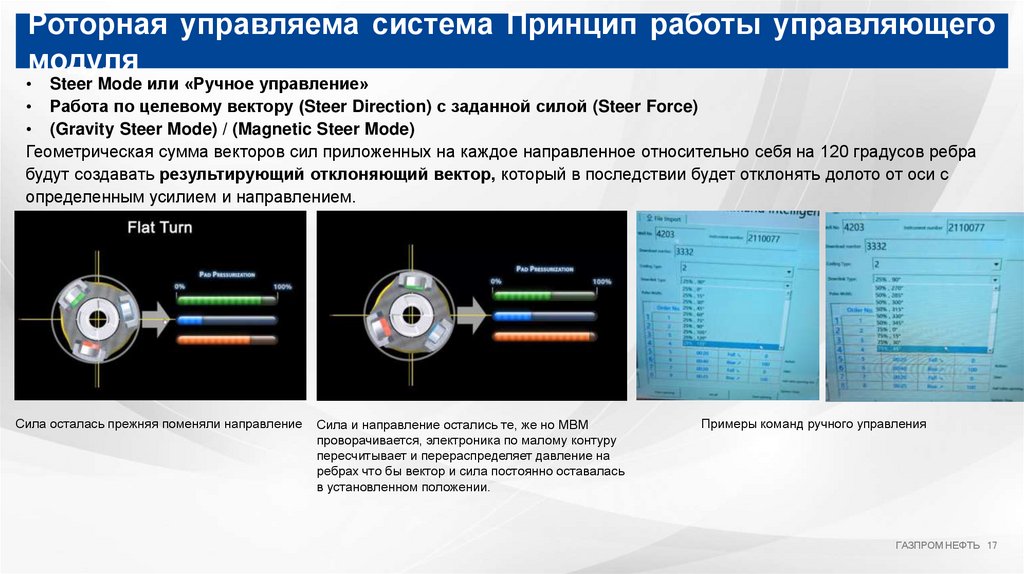
Геометрическая сумма векторов сил приложенных на каждое направленное относительно себя на 120 градусов ребра
будут создавать результирующий отклоняющий вектор, который в последствии будет отклонять долото от оси с
определенным усилием и направлением.
Сила осталась прежняя поменяли направление
Сила и направление остались те, же но МВМ
проворачивается, электроника по малому контуру
пересчитывает и перераспределяет давление на
ребрах что бы вектор и сила постоянно оставалась
в установленном положении.
Примеры команд ручного управления
ГАЗПРОМ НЕФТЬ 17
18.
Роторная управляема система Принцип работы управляющего
модуля
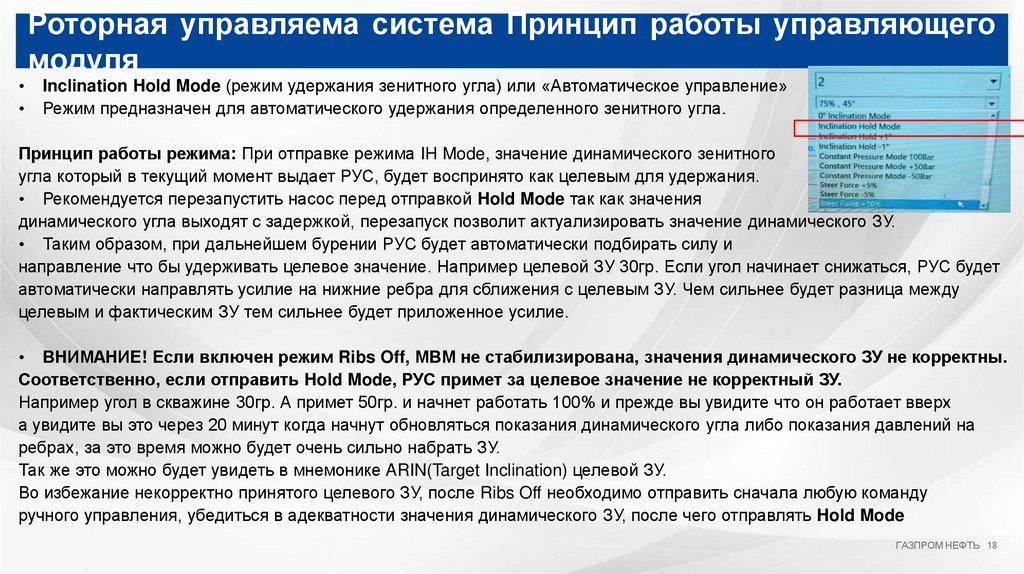
Inclination Hold Mode (режим удержания зенитного угла) или «Автоматическое управление»
Режим предназначен для автоматического удержания определенного зенитного угла.
Принцип работы режима: При отправке режима IH Mode, значение динамического зенитного
угла который в текущий момент выдает РУС, будет воспринято как целевым для удержания.
• Рекомендуется перезапустить насос перед отправкой Hold Mode так как значения
динамического угла выходят с задержкой, перезапуск позволит актуализировать значение динамического ЗУ.
• Таким образом, при дальнейшем бурении РУС будет автоматически подбирать силу и
направление что бы удерживать целевое значение. Например целевой ЗУ 30гр. Если угол начинает снижаться, РУС будет
автоматически направлять усилие на нижние ребра для сближения с целевым ЗУ. Чем сильнее будет разница между
целевым и фактическим ЗУ тем сильнее будет приложенное усилие.
• ВНИМАНИЕ! Если включен режим Ribs Off, МВМ не стабилизирована, значения динамического ЗУ не корректны.
Соответственно, если отправить Hold Mode, РУС примет за целевое значение не корректный ЗУ.
Например угол в скважине 30гр. А примет 50гр. и начнет работать 100% и прежде вы увидите что он работает вверх
а увидите вы это через 20 минут когда начнут обновляться показания динамического угла либо показания давлений на
ребрах, за это время можно будет очень сильно набрать ЗУ.
Так же это можно будет увидеть в мнемонике ARIN(Target Inclination) целевой ЗУ.
Во избежание некорректно принятого целевого ЗУ, после Ribs Off необходимо отправить сначала любую команду
ручного управления, убедиться в адекватности значения динамического ЗУ, после чего отправлять Hold Mode
ГАЗПРОМ НЕФТЬ 18
19.
Роторная управляема система Принцип работы управляющего
модуля
Inclination Hold Mode (режим удержания зенитного угла) или «Автоматическое управление»
• На текущий момент РУС в режиме Hold Mode не может корректировать Азимут но в перспективе производитель
обещает что данная возможность в скором времени появится. Поэтому в интервалах стабилизации часто приходится
выходить из режима Hold Mode в ручное управление что бы скорректировать Азимут.
• Не рекомендуется работать на корректировку азимута на малых зенитных углах более чем 8-12 метров, так как
РУС способен выдавать очень большие интенсивности, и если пробурить всю свечу можно легко развернуть
по 20-30 градусов. Поэтому для корректировки Азимута аккуратно применяем 25% силы в 90 или 270 начиная
с 8-10 метров, далее Hold, промеряем смотрим как разворачивается Азимут, далее уже можно по необходимости
добавлять или уменьшать метраж и силу для корректировки азимута.
• Для того что бы выйти из режима НМ в ручное управление ничего не требуется, достаточно просто отправить нужную
команду ручного управления (Steer Mode)
ГАЗПРОМ НЕФТЬ 19
20.
Роторная управляема система Принцип работы управляющегомодуля
Inclination Hold Mode (режим удержания зенитного угла) или «Автоматическое управление»
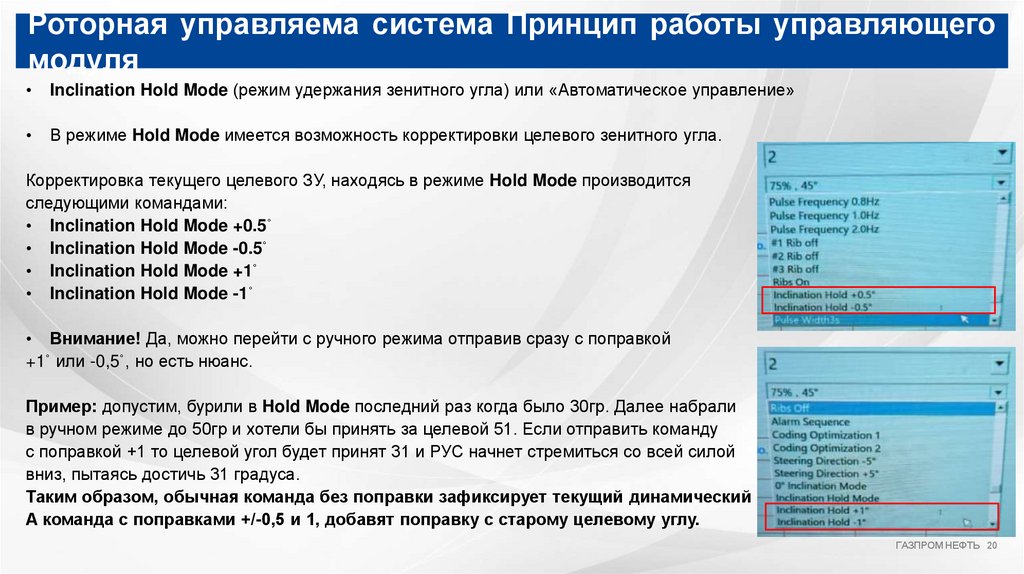
В режиме Hold Mode имеется возможность корректировки целевого зенитного угла.
Корректировка текущего целевого ЗУ, находясь в режиме Hold Mode производится
следующими командами:
• Inclination Hold Mode +0.5˚
• Inclination Hold Mode -0.5˚
• Inclination Hold Mode +1˚
• Inclination Hold Mode -1˚
• Внимание! Да, можно перейти с ручного режима отправив сразу с поправкой
+1˚ или -0,5˚, но есть нюанс.
Пример: допустим, бурили в Hold Mode последний раз когда было 30гр. Далее набрали
в ручном режиме до 50гр и хотели бы принять за целевой 51. Если отправить команду
с поправкой +1 то целевой угол будет принят 31 и РУС начнет стремиться со всей силой
вниз, пытаясь достичь 31 градуса.
Таким образом, обычная команда без поправки зафиксирует текущий динамический угол.
А команда с поправками +/-0,5 и 1, добавят поправку с старому целевому углу.
ГАЗПРОМ НЕФТЬ 20
21.
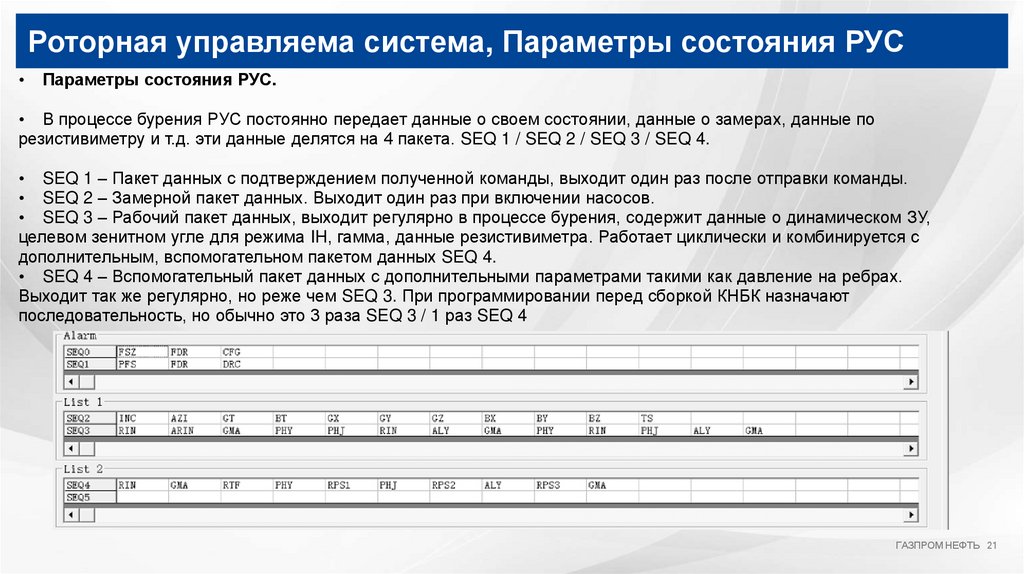
Роторная управляема система, Параметры состояния РУСПараметры состояния РУС.
• В процессе бурения РУС постоянно передает данные о своем состоянии, данные о замерах, данные по
резистивиметру и т.д. эти данные делятся на 4 пакета. SEQ 1 / SEQ 2 / SEQ 3 / SEQ 4.
• SEQ 1 – Пакет данных с подтверждением полученной команды, выходит один раз после отправки команды.
• SEQ 2 – Замерной пакет данных. Выходит один раз при включении насосов.
• SEQ 3 – Рабочий пакет данных, выходит регулярно в процессе бурения, содержит данные о динамическом ЗУ,
целевом зенитном угле для режима IH, гамма, данные резистивиметра. Работает циклически и комбинируется с
дополнительным, вспомогательном пакетом данных SEQ 4.
• SEQ 4 – Вспомогательный пакет данных с дополнительными параметрами такими как давление на ребрах.
Выходит так же регулярно, но реже чем SEQ 3. При программировании перед сборкой КНБК назначают
последовательность, но обычно это 3 раза SEQ 3 / 1 раз SEQ 4
ГАЗПРОМ НЕФТЬ 21
22.
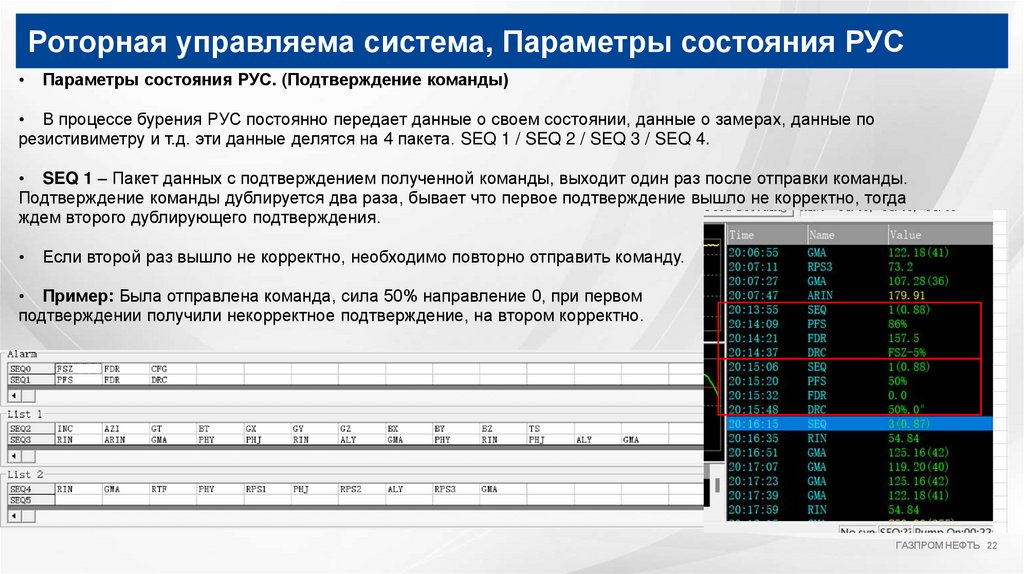
Роторная управляема система, Параметры состояния РУСПараметры состояния РУС. (Подтверждение команды)
• В процессе бурения РУС постоянно передает данные о своем состоянии, данные о замерах, данные по
резистивиметру и т.д. эти данные делятся на 4 пакета. SEQ 1 / SEQ 2 / SEQ 3 / SEQ 4.
• SEQ 1 – Пакет данных с подтверждением полученной команды, выходит один раз после отправки команды.
Подтверждение команды дублируется два раза, бывает что первое подтверждение вышло не корректно, тогда
ждем второго дублирующего подтверждения.
Если второй раз вышло не корректно, необходимо повторно отправить команду.
• Пример: Была отправлена команда, сила 50% направление 0, при первом
подтверждении получили некорректное подтверждение, на втором корректно.
ГАЗПРОМ НЕФТЬ 22
23.
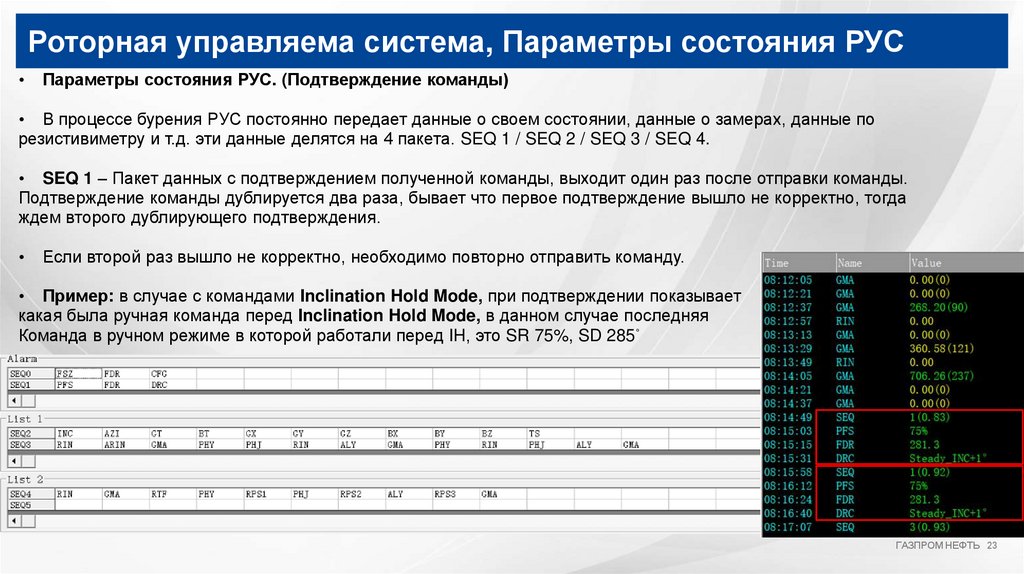
Роторная управляема система, Параметры состояния РУСПараметры состояния РУС. (Подтверждение команды)
• В процессе бурения РУС постоянно передает данные о своем состоянии, данные о замерах, данные по
резистивиметру и т.д. эти данные делятся на 4 пакета. SEQ 1 / SEQ 2 / SEQ 3 / SEQ 4.
• SEQ 1 – Пакет данных с подтверждением полученной команды, выходит один раз после отправки команды.
Подтверждение команды дублируется два раза, бывает что первое подтверждение вышло не корректно, тогда
ждем второго дублирующего подтверждения.
Если второй раз вышло не корректно, необходимо повторно отправить команду.
• Пример: в случае с командами Inclination Hold Mode, при подтверждении показывает
какая была ручная команда перед Inclination Hold Mode, в данном случае последняя
Команда в ручном режиме в которой работали перед IH, это SR 75%, SD 285˚
ГАЗПРОМ НЕФТЬ 23
24.
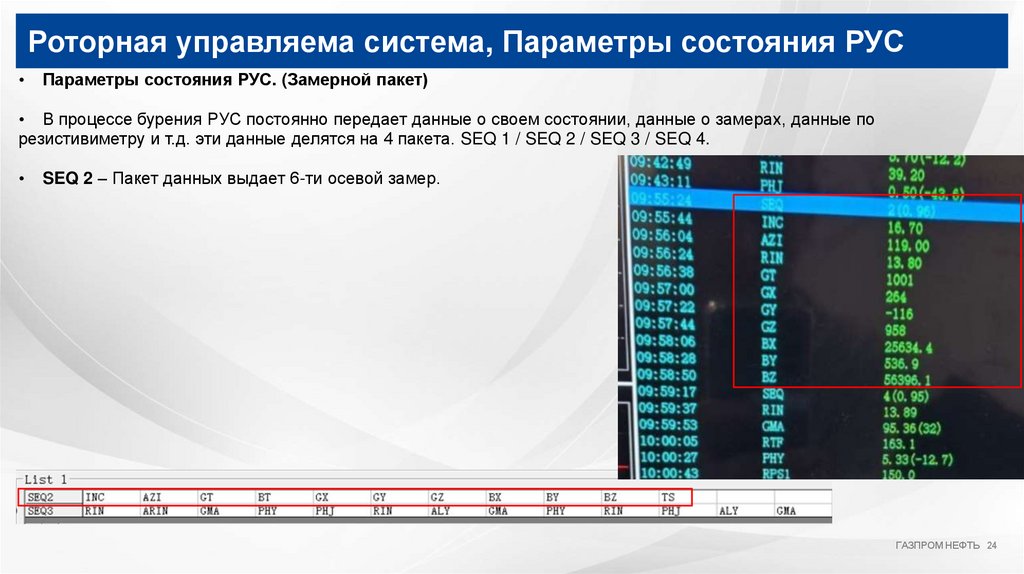
Роторная управляема система, Параметры состояния РУСПараметры состояния РУС. (Замерной пакет)
• В процессе бурения РУС постоянно передает данные о своем состоянии, данные о замерах, данные по
резистивиметру и т.д. эти данные делятся на 4 пакета. SEQ 1 / SEQ 2 / SEQ 3 / SEQ 4.
SEQ 2 – Пакет данных выдает 6-ти осевой замер.
ГАЗПРОМ НЕФТЬ 24
25.
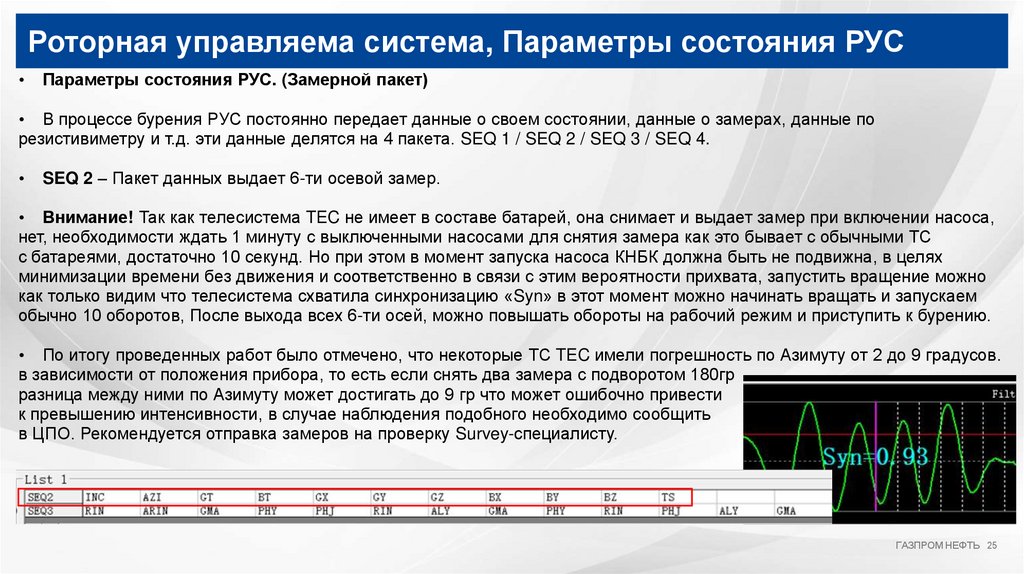
Роторная управляема система, Параметры состояния РУСПараметры состояния РУС. (Замерной пакет)
• В процессе бурения РУС постоянно передает данные о своем состоянии, данные о замерах, данные по
резистивиметру и т.д. эти данные делятся на 4 пакета. SEQ 1 / SEQ 2 / SEQ 3 / SEQ 4.
SEQ 2 – Пакет данных выдает 6-ти осевой замер.
• Внимание! Так как телесистема TEC не имеет в составе батарей, она снимает и выдает замер при включении насоса,
нет, необходимости ждать 1 минуту с выключенными насосами для снятия замера как это бывает с обычными ТС
с батареями, достаточно 10 секунд. Но при этом в момент запуска насоса КНБК должна быть не подвижна, в целях
минимизации времени без движения и соответственно в связи с этим вероятности прихвата, запустить вращение можно
как только видим что телесистема схватила синхронизацию «Syn» в этот момент можно начинать вращать и запускаем
обычно 10 оборотов, После выхода всех 6-ти осей, можно повышать обороты на рабочий режим и приступить к бурению.
• По итогу проведенных работ было отмечено, что некоторые ТС TEC имели погрешность по Азимуту от 2 до 9 градусов.
в зависимости от положения прибора, то есть если снять два замера с подворотом 180гр
разница между ними по Азимуту может достигать до 9 гр что может ошибочно привести
к превышению интенсивности, в случае наблюдения подобного необходимо сообщить
в ЦПО. Рекомендуется отправка замеров на проверку Survey-специалисту.
ГАЗПРОМ НЕФТЬ 25
26.
Роторная управляема система, Параметры состояния РУСПараметры состояния РУС. (Рабочий регулярный пакет)
• SEQ 3 – Рабочий пакет данных, выходит регулярно в процессе бурения,
содержит данные о динамическом ЗУ, целевом зенитном угле для режима IH,
гамма, данные резистивиметра. Работает циклически и комбинируется с
дополнительным, вспомогательном пакетом данных SEQ 4.
ГАЗПРОМ НЕФТЬ 26
27.
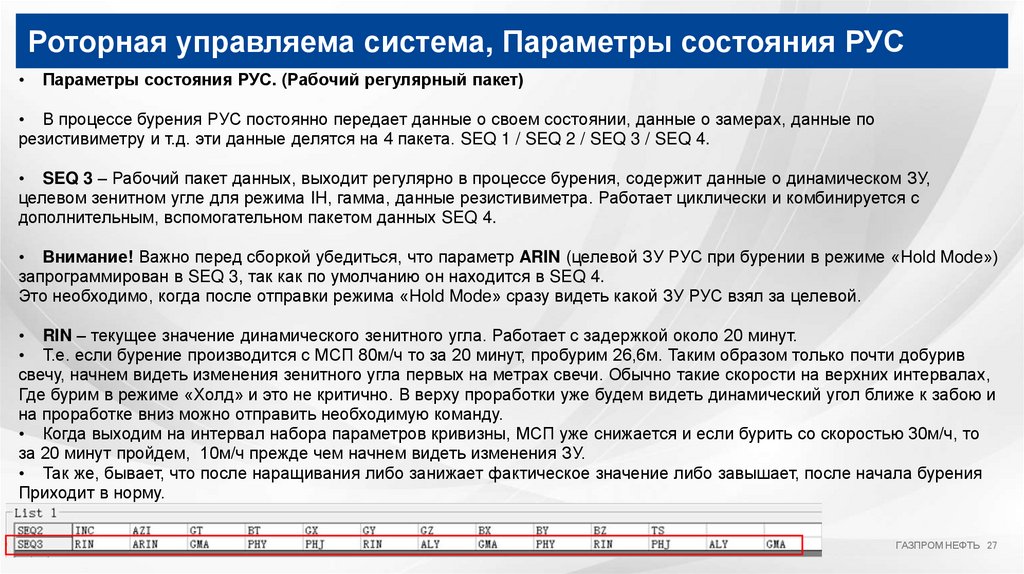
Роторная управляема система, Параметры состояния РУСПараметры состояния РУС. (Рабочий регулярный пакет)
• В процессе бурения РУС постоянно передает данные о своем состоянии, данные о замерах, данные по
резистивиметру и т.д. эти данные делятся на 4 пакета. SEQ 1 / SEQ 2 / SEQ 3 / SEQ 4.
• SEQ 3 – Рабочий пакет данных, выходит регулярно в процессе бурения, содержит данные о динамическом ЗУ,
целевом зенитном угле для режима IH, гамма, данные резистивиметра. Работает циклически и комбинируется с
дополнительным, вспомогательном пакетом данных SEQ 4.
• Внимание! Важно перед сборкой убедиться, что параметр ARIN (целевой ЗУ РУС при бурении в режиме «Hold Mode»)
запрограммирован в SEQ 3, так как по умолчанию он находится в SEQ 4.
Это необходимо, когда после отправки режима «Hold Mode» сразу видеть какой ЗУ РУС взял за целевой.
• RIN – текущее значение динамического зенитного угла. Работает с задержкой около 20 минут.
• Т.е. если бурение производится с МСП 80м/ч то за 20 минут, пробурим 26,6м. Таким образом только почти добурив
свечу, начнем видеть изменения зенитного угла первых на метрах свечи. Обычно такие скорости на верхних интервалах,
Где бурим в режиме «Холд» и это не критично. В верху проработки уже будем видеть динамический угол ближе к забою и
на проработке вниз можно отправить необходимую команду.
• Когда выходим на интервал набора параметров кривизны, МСП уже снижается и если бурить со скоростью 30м/ч, то
за 20 минут пройдем, 10м/ч прежде чем начнем видеть изменения ЗУ.
• Так же, бывает, что после наращивания либо занижает фактическое значение либо завышает, после начала бурения
Приходит в норму.
ГАЗПРОМ НЕФТЬ 27
28.
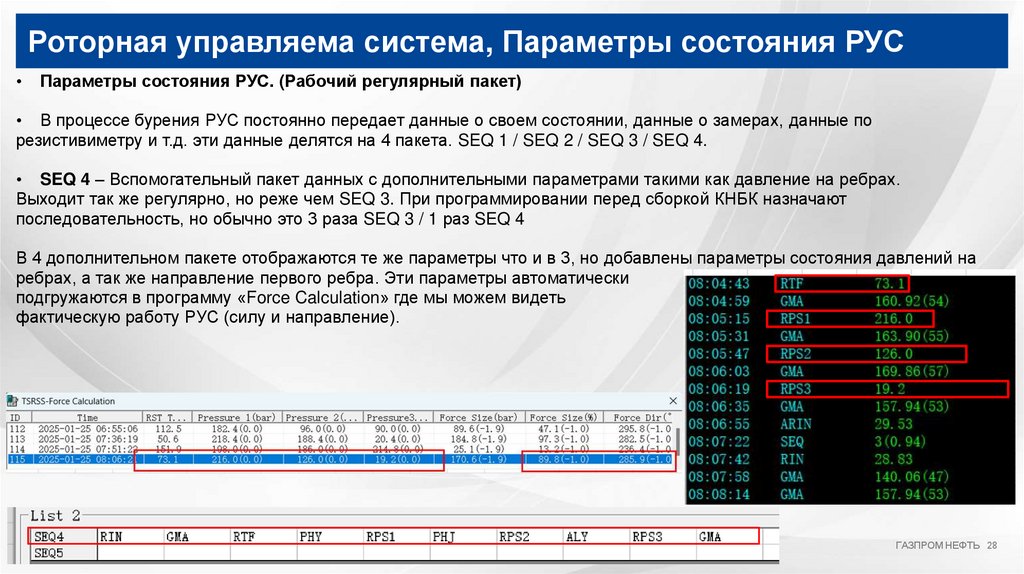
Роторная управляема система, Параметры состояния РУСПараметры состояния РУС. (Рабочий регулярный пакет)
• В процессе бурения РУС постоянно передает данные о своем состоянии, данные о замерах, данные по
резистивиметру и т.д. эти данные делятся на 4 пакета. SEQ 1 / SEQ 2 / SEQ 3 / SEQ 4.
• SEQ 4 – Вспомогательный пакет данных с дополнительными параметрами такими как давление на ребрах.
Выходит так же регулярно, но реже чем SEQ 3. При программировании перед сборкой КНБК назначают
последовательность, но обычно это 3 раза SEQ 3 / 1 раз SEQ 4
В 4 дополнительном пакете отображаются те же параметры что и в 3, но добавлены параметры состояния давлений на
ребрах, а так же направление первого ребра. Эти параметры автоматически
подгружаются в программу «Force Calculation» где мы можем видеть
фактическую работу РУС (силу и направление).
ГАЗПРОМ НЕФТЬ 28
29.
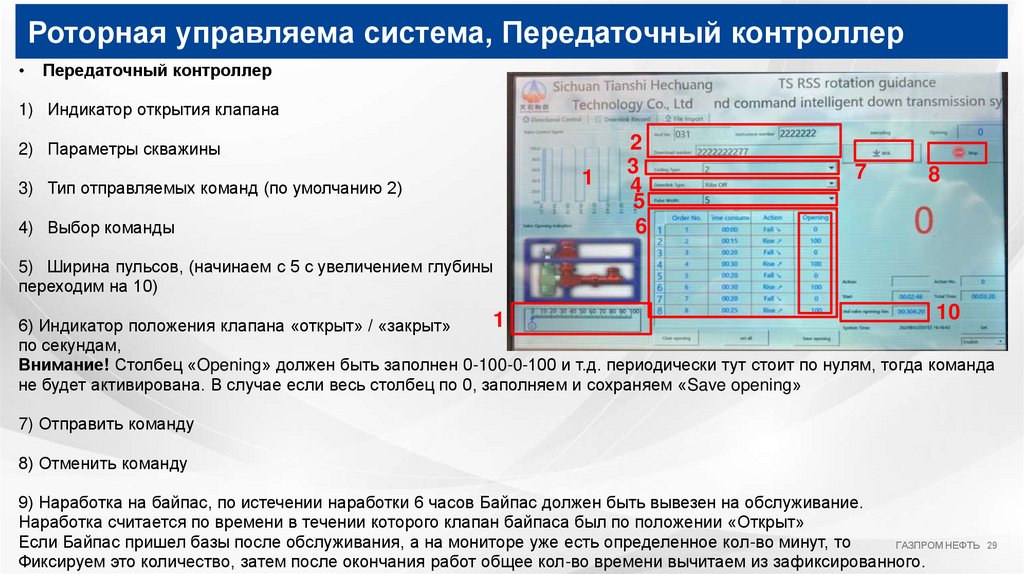
Роторная управляема система, Передаточный контроллерПередаточный контроллер
1) Индикатор открытия клапана
2) Параметры скважины
3) Тип отправляемых команд (по умолчанию 2)
4) Выбор команды
1
2
3
4
5
6
7
8
5) Ширина пульсов, (начинаем с 5 с увеличением глубины
переходим на 10)
10
1
6) Индикатор положения клапана «открыт» / «закрыт»
по секундам,
Внимание! Столбец «Opening» должен быть заполнен 0-100-0-100 и т.д. периодически тут стоит по нулям, тогда команда
не будет активирована. В случае если весь столбец по 0, заполняем и сохраняем «Save opening»
7) Отправить команду
8) Отменить команду
9) Наработка на байпас, по истечении наработки 6 часов Байпас должен быть вывезен на обслуживание.
Наработка считается по времени в течении которого клапан байпаса был по положении «Открыт»
Если Байпас пришел базы после обслуживания, а на мониторе уже есть определенное кол-во минут, то
ГАЗПРОМ НЕФТЬ 29
Фиксируем это количество, затем после окончания работ общее кол-во времени вычитаем из зафиксированного.
30.
Вопросы к аудитории• На какие группы делятся роторные управляемые системы
• Что влияет на интенсивность набора параметров кривизны
• Большой и малый контуры работы
• Режимы работы
• Magnetic Steer Mode / Gravity Steer Mode
• SEQ 1 / SEQ 2 / SEQ 3 / SEQ 4
31.
Вопросы по модулю32.
СПАСИБО ЗАВНИМАНИЕ
ГАЗПРОМ НЕФТЬ 32