

 geography
geographySimilar presentations:




")





e93fea07bfae54f37e7b2fc915355e76
1.
Геодезические приборы исистемы
Современные инструменты для измерения земной
поверхности
Преподаватель : Баннов Максим Валерьевич
Дата : 6.11.2025
2.
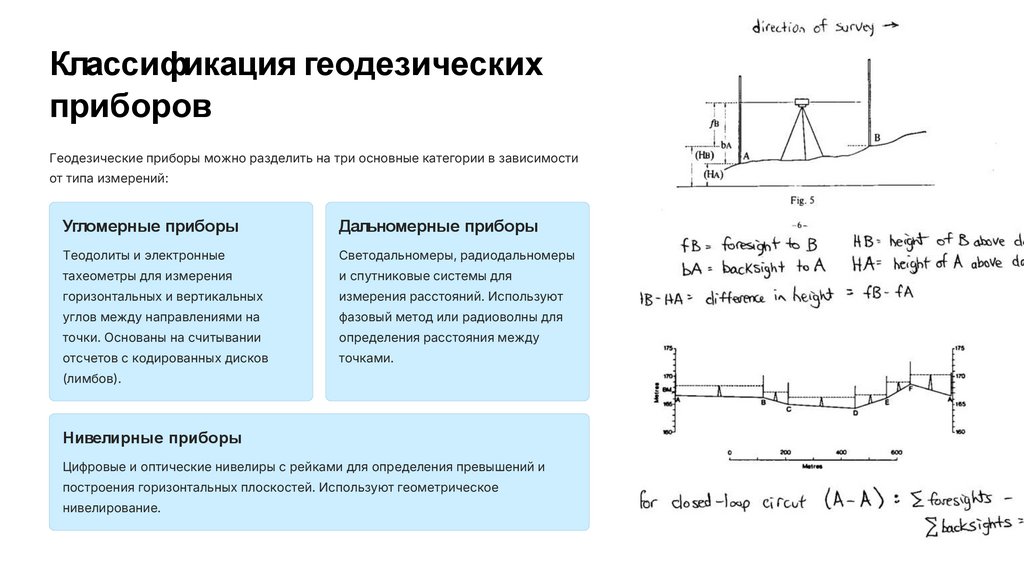
Классификация геодезическихприборов
Геодезические приборы можно разделить на три основные категории в зависимости
от типа измерений:
Угломерные приборы
Дальномерные приборы
Теодолиты и электронные
Светодальномеры, радиодальномеры
тахеометры для измерения
и спутниковые системы для
горизонтальных и вертикальных
измерения расстояний. Используют
углов между направлениями на
фазовый метод или радиоволны для
точки. Основаны на считывании
определения расстояния между
отсчетов с кодированных дисков
точками.
(лимбов).
Нивелирные приборы
Цифровые и оптические нивелиры с рейками для определения превышений и
построения горизонтальных плоскостей. Используют геометрическое
нивелирование.
3.
Оптико-механическая система геодезическихприборов
Основные компоненты оптико-механической системы обеспечивают надежность и точность измерений:
Зрительная труба
Уровни (цилиндрический и круглый)
Предназначена для наведения на целевую точку. Содержит
Цилиндрический уровень приводит прибор в горизонтальное
объектив (собирает свет), окуляр (увеличивает изображение)
положение с высокой точностью. Круглый уровень
и сетку нитей для точного визирования. Увеличение позволяет
используется для грубого приведения в горизонт. Пузырек
видеть удаленные цели с высокой четкостью.
воздуха показывает отклонение от горизонтали.
Оси и подставка
Отсчетные устройства
Вертикальная ось вращения обеспечивает поворот прибора в
В классических приборах используются механические лимбы
горизонтальной плоскости. Горизонтальная ось позволяет
(круги) и верньеры для считывания значений. В современных
наклонять трубу для измерения вертикальных углов.
приборах применяются электронные кодирующие диски,
Подставка (тренога) обеспечивает устойчивость.
которые обеспечивают автоматическое считывание и высокую
точность.
4.
Электронны е системы и датчикиЭлектронные компоненты превращают механические приборы в сложные системы с автоматической обработкой данных:
Процессор и память
Интерфейс оператора
Управляют функциями прибора, выполняют вычисления и сохраняют
Дисплей высокого разрешения отображает результаты измерений, углы,
данные измерений. Современные процессоры позволяют обрабатывать
расстояния и координаты. Клавиатура позволяет оператору управлять
информацию в реальном времени и выдавать результаты на экран.
прибором, вводить параметры и запускать функции.
Датчики и компенсаторы
Система питания
Датчики наклона (компенсаторы) автоматически учитывают небольшие
Аккумуляторные батареи обеспечивают автономную работу.
отклонения оси при изменении позиции. Датчики температуры и давления
Современные приборы имеют индикатор уровня заряда и экономный
компенсируют влияние внешних условий на точность измерений.
режим для продления время работы на полевых работах.
5.
Система измерения расстоянийДальномерные системы используют разные физические принципы для определения расстояний между точками:
Светодальномер (электронный)
Излучает модулированный световой луч (лазер или инфракрасный свет) в сторону отражателя или объекта. Луч отражается и
возвращается к приемному модулю. Система измеряет разность фаз между отправленным и отраженным сигналом. На основе этой
разности и скорости света вычисляется расстояние: D = (λ/2) × (N + Δφ/2π), где λ — длина волны модуляции, N — целое число
полуволн, Δφ — измеренная разность фаз.
Радиодальномер
Использует радиоволны для измерения расстояния. Применяется главным образом в спутниковых системах GNSS (GPS, ГЛОНАСС
и др.), где наземные приемники определяют расстояние до спутников путем измерения времени прохождения сигнала. Фазовый
метод обеспечивает высокую точность при работе на больших расстояниях.
6.
Электронный тахеометр:универсальный прибор
Электронный тахеометр объединяет угломерную и дальномерную системы в одном
устройстве, позволяя выполнять комплексные измерения:
01
02
Угловые измерения
Линейные измерения
Углы (горизонтальные и вертикальные)
Встроенный светодальномер измеряет
измеряются с помощью электронных
наклонное расстояние до отражателя или
лимбов — вращающихся кодирующих
прямо до объекта (в бесприемном
дисков. Луч света или система
режиме). С учетом измеренного
сканирования считывает код с диска, и
вертикального угла процессор вычисляет
процессор преобразует его в цифровое
горизонтальное проложение и превышение
значение угла с точностью до нескольких
между точками.
угловых секунд.
03
Обработка данных
Процессор объединяет все измерения и сразу выдает полную информацию: координаты
точки (X, Y, Z), превышение, направление визирования, площадь полигона и другие
параметры. Данные сохраняются в памяти прибора для последующей обработки.
7.
Спутниковы е системы (GNSS) и цифровы енивелиры
Эти приборы используют альтернативные методы для высокоточных измерений в различных условиях:
Спутниковы е системы (GNSS)
Циф ровой нивелир
Принцип работы: Приемник одновременно принимает сигналы
Устройство и подготовка: Устанавливается на штатив и
с нескольких спутников (минимум 4-5 для определения
приводится в горизонтальное положение с помощью уровня.
координат). Измеряя время прохождения сигнала от спутника
Оператор наводит его на специальную рейку с штрих-кодом.
до приемника, вычисляются расстояния. Положение
приемника определяется методом пространственной линейной
засечки.
Высокая точность: Достигается относительным методом, когда
два приемника работают одновременно — базовый (опорный) и
ровер (подвижный). Это позволяет исключить большинство
систематических ошибок и достичь точности до нескольких
миллиметров.
Принцип действия: Прибор автоматически считывает штрихкод, фокусируется и вычисляет отсчет по положению штрихов
на рейке с высокой точностью (обычно ±0.2 мм). Результат
сохраняется в памяти для дальнейшей обработки и анализа.
8.
Поверка и юстировка геодезических приборовПоверка и юстировка — это взаимосвязанные процессы обеспечения метрологической точности приборов в соответствии с
установленными нормами:
Поверка
Юстировка
Проверка соответствия паспортных характеристик и точности
Устранение выявленных отклонений путем регулировки
прибора установленным нормам (ГОСТ). Отвечает на вопрос:
оптико-механических и электронных компонентов. Отвечает
"Пригоден ли прибор для работы?"
на вопрос: "Что и как нужно исправить?"
Основны е геометрические условия теодолитов
Условие 1 — Ось уровня перпендикулярна оси вращения: Цилиндрический уровень должен быть перпендикулярен вертикальной
оси вращения прибора. Поверка: уровень устанавливается параллельно двум подъемным винтам, приводится в нуль-пункт, затем
прибор поворачивается на 180°. Если пузырек сместился, условие нарушено. Юстировка: подъемные винты исправляют половину
отклонения, исправительные винты уровня — вторую половину.
Условие 2 — Вертикальность нитей сетки: Вертикальная нить сетки должна быть строго перпендикулярна горизонтальной оси.
Поверка: вертикальная нить наводится на четкую точку, и алидада плавно поворачивается в вертикальной плоскости. Если нить
сходит с точки, условие нарушено. Юстировка: поворотом сетки нитей в ее оправе.
9.
Условия юстировки: коллимационная ошибка и оси вращенияПродолжение рассмотрения критических геометрических условий приборов:
Условие 3 — Коллимационная ошибка
Визирная ось зрительной трубы должна быть перпендикулярна горизонтальной оси (отсутствие коллимационной ошибки). Поверка выполняется методом
двойного нивелирования дальнего угла: наводятся на удаленную точку при положении круга право (КП), берется отсчет. Затем труба переводится через зенит,
наводятся на ту же точку при положении круга лево (КЛ), снова берется отсчет. Разница между отсчетами должна быть ровно 180°. Юстировка: изменением
положения сетки нитей с помощью горизонтальных исправительных винтов.
Условие 4 — Перпендикулярность осей
Ось вращения трубы должна быть перпендикулярна вертикальной оси вращения прибора. Поверка методом нивелирования высоких и низких точек: наводятся
на высокую точку (например, шпиль здания), берется отсчет, опускают трубу и отмечают проекцию сетки на стене. При переводе трубы через зенит и
повторном нивелировании вторая проекция не должна совпадать с первой (допускается небольшое различие). Юстировка требует мастерской настройки, так
как связана с горизонтальной осью и внутренней геометрией прибора.
Нивелиры: главное условие
Для нивелиров главным условием является параллельность визирной оси трубы и оси цилиндрического уровня. Поверка выполняется методом двойного
нивелирования из середины. Нивелир устанавливается посередине между двумя точками (А и В) на расстояниях, исключающих влияние кривизны Земли.
Берутся отсчеты по рейкам, затем нивелир переносится к одной рейке и повторяются измерения. Вычисляется невязка. Юстировка производится элевационным
винтом и исправительными винтами сетки нитей для установки правильного отсчета на дальней рейке.
10.
Приборы для угловы х и линейны х измеренийОбзор специализированных инструментов, применяемых в геодезических работах:
1
Теодолит
Состоит из горизонтального и вертикального кругов (лимбов), зрительной трубы с сеткой нитей, уровней, отсчетной системы (микроскопов) и подставки с подъемными винтами. Основан на
измерении углов между направлениями на точки. Угол фиксируется как разность отсчетов по лимбу при наведении на две целевые точки.
2
Рулетка и мерная лента
Стальная или тканевая лента с нанесенными делениями в метрах и сантиметрах. Применяется для прямого механического откладывания эталона длины вдоль измеряемой линии.
Используется для вспомогательных измерений и детальной съемки.
3
Светодальномер
Передающий модуль излучает модулированный световой сигнал. Сигнал отражается от отражателя и возвращается к приемному модулю. Система измеряет разность фаз. Расстояние
вычисляется по формуле: D = (λ/2) × (N + Δφ/2π), обеспечивая высокую точность на расстояниях до нескольких километров.
4
Нивелирная рейка
Градуированная линейка, устанавливаемая вертикально на точках местности. Используется совместно с нивелиром для геометрического нивелирования. Превышение вычисляется как
разность отсчетов: h = a - b, где a — отсчет на задней рейке, b — отсчет на передней рейке. Цифровые рейки со штрих-кодом повышают точность и скорость работы.
Спутниковая система (база-ровер)
5
Два приемника GNSS работают одновременно — базовый устанавливается на опорной точке, ровер — на измеряемых точках. Базовая линия (расстояние между приемниками) называется
базой. Ее векторные компоненты (ΔX, ΔY, ΔZ) вычисляются с высокой точностью и преобразуются в горизонтальное расстояние и превышение, обеспечивая сантиметровую и
миллиметровую точность.