




























 marketing
marketingSimilar presentations:

")





Auto Cat Feeder
1.
Auto Cat FeederTeam #C
Team members:
Polotov Arlen
Sumiyaryenchin Anar Erdene
Adilbekov Adilbek
Chagai Vladimir
Gartman Bekali
12235632
12235627
12235628
12235620
12235617
Final Presentation &
Demo
December 11, 2025
2025-2 VIP Course
Professors: Mehdi Pirahandeh, Kakani Vijay, and Serrao Pruthvi Loy Rozario
School of Global Convergence Studies
2. Problem
Many pet owners struggle to feed their pets on time due to workor busy schedules. Irregular feeding can cause overeating, stress,
and unhealthy habits for pets. Our project aims to solve this by
creating a smart automated pet feeder that delivers meals on
schedule, controls portions, and lets owners monitor feeding
through a simple app. This system provides convenience for
owners and a healthier routine for pets.
School of Global Convergence Studies
2
3. Our solution
Our product is a fully automated smart pet feeder designed formodern pet owners who can’t always be home to feed their pets
on time. Built around a Raspberry Pi system and a precise
dispensing mechanism, it delivers accurate portions at scheduled
times, monitors how much your pet eats, and tracks food levels
using sensors. Through the connected app, owners can check
feeding history, remaining food, and overall eating behavior from
anywhere. This system eliminates overeating, irregular meal
times, and stress caused by inconsistent feeding giving pets a
healthier routine and owners complete peace of mind.
School of Global Convergence Studies
3
4. Market overview
Our target audience consists of working individuals who cannotalways feed their pets on time. This issue is especially relevant in
South Korea, where many people live alone and often adopt cats
for companionship. Automatic feeding solutions offer
convenience, peace of mind, and improved pet care.
School of Global Convergence Studies
4
5. Features
Automated feeding: Users can schedule any number of feeding times throughout the
day.
Precise portion control: Built-in high-accuracy weighing system measures portions
down to 0.1 g.
Feeding monitoring & logging: A web dashboard displays real-time status and
feeding history.
Easy maintenance: Both the food container and bowl are designed to be removed and
washed effortlessly.
Food-level detection: A volume sensor notifies the user when the container reaches a
low level.
Camera integration: A built-in camera automatically sends photos of the pet during
feeding to the website.
Interactive display: shows the remaining food weight and container fill level in real
time.
School of Global Convergence Studies
5
6. Design
1)Dry Container2)Raspberry Pi3
3)Food dispenser
4)Scales and bowl
5)Display
School of Global Convergence Studies
6
7. Design measurements
Height: 27cmLength: 24cm
Width: 18cm
School of Global Convergence Studies
7
8. Container specifications
Volume: 800mLContainer type: Chips can
Diameter: 7 cm
Height: 21cm
School of Global Convergence Studies
8
9. Bowl specifications
Volume: 300mLContainer type: Pet food bowl
Diameter: 10.5cm
Height: 5cm
School of Global Convergence Studies
9
10. Cat food details and Final capacity
Average cat food size: 0.5 cm diameter1 Full can = ~270 g of cat food
Perfect for 4-7 days of feeding (depending on cat weight)
School of Global Convergence Studies
10
11. 3D modelling
•Designed all components in Fusion 360 using sketches and solid modelling tools.•Created the hopper, wheel, housing, and servo mount with Extrude, Revolve, and Fillet.
•Added mounting holes and internal channels to match mechanical requirements.
•Assembled all parts virtually to check alignment and motion.
•Exported models as STL and 3D-printed the final parts
School of Global Convergence Studies
11
12. Hardware components 3D and Frame
To create the main moving components and the structural frame ofthe feeding mechanism, we used a 3D printer. This allowed us to
prototype and adjust mechanical parts with high precision.
The main outer body, however, was made from recycled materials,
making the device both environmentally friendly and cost-effective.
School of Global Convergence Studies
12
13. Web interface
School of Global Convergence Studies13
14. Workflow
At the scheduled time, the servo motor activates and begins rotating theblades that dispense food from the container. When the target weight is
reached, the mechanism automatically stops. As the cat starts eating and the
weight decreases, a log is sent to the server indicating that the pet has begun
feeding.
A distance sensor measures the fill level of the container and sends this
information to the web server for real-time display.
An interactive display on the device shows the container status and the
current portion weight.
School of Global Convergence Studies
14
15. Hardware components
Raspberry Pi 3Serves as the main processing unit. It hosts the local server, runs all control logic, and manages
communication with connected sensors and motors.
Servo Motor
Acts as the primary feeding mechanism. It rotates the internal blades that dispense food from the
container into the bowl.
Scales (Load Cell(5kg) + HX711)
Measure the food portion with high precision. They ensure
accurate dispensing and trigger events when the pet begins to
eat.
School of Global Convergence Studies
15
16. Hardware components
Display (OLED 128x64)Shows essential information such as current portion
weight and container fill level and time.
Ultrasonic Sensor HC SR04
Monitors the remaining food inside the container and
sends level updates to the web server.
Webcam
Provides real-time visual monitoring and captures
images of the pet during feeding.
School of Global Convergence Studies
16
17. Software library
RPi.GPIO — controls Raspberry Pi GPIO pins for sensors andmotors.
hx711_multi — reads weight measurements from the HX711
load cell amplifier.
gpiozero — simplifies working with motors, sensors, and other
GPIO hardware.
Luma.oled — drives the OLED display and renders text or
graphics.
PIL — processes and renders images for the OLED display.
datetime — handles system time for scheduled feeding logic.
opencv — captures and processes images from the webcam.
flask — runs the local web server for monitoring and control.
School of Global Convergence Studies
17
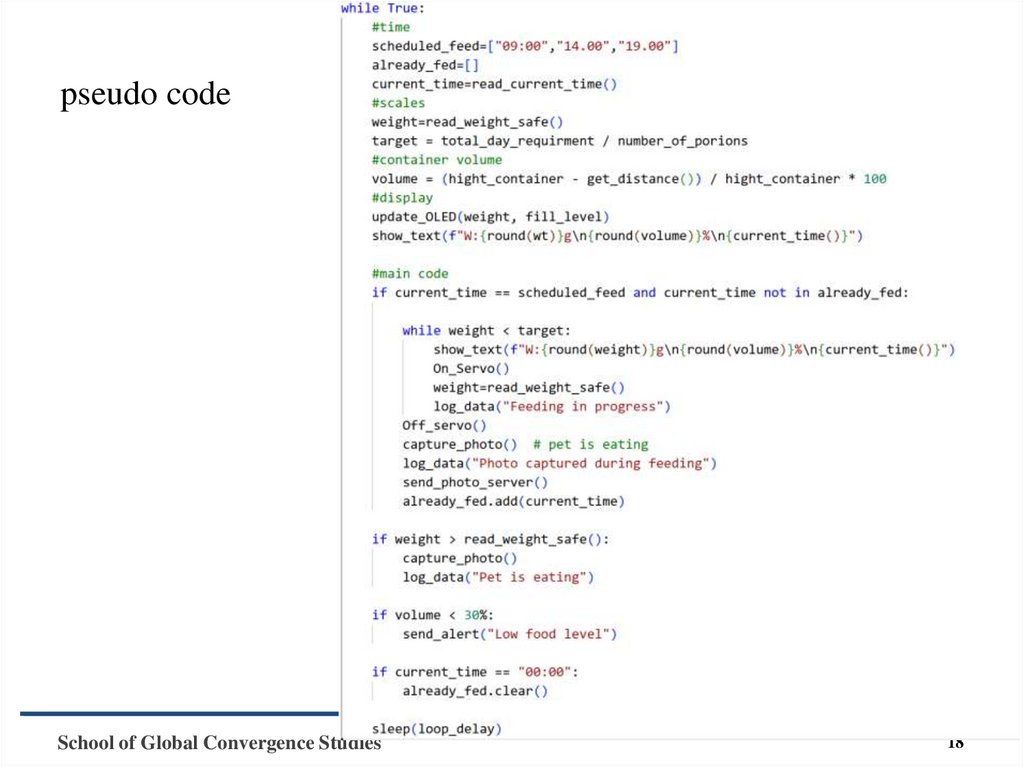
18.
pseudo codeSchool of Global Convergence Studies
18
19. Functions
School of Global Convergence Studies19
20. Functions
School of Global Convergence Studies20
21. Prototypes
Servo wings testServo+ultrasonic test
School of Global Convergence Studies
21
22. Prototypes
Display+scalesServo dispense test
School of Global Convergence Studies
22
23. Tasks
Setup and configuration of Raspberry Pi (GPIO, server, file structure)
• Integration of servo motor control logic for food dispensing
• Implementation of weight-based feedback loop using HX711 load cell
• Development of ultrasonic distance measurement for container volume
• OLED display interface for real-time status updates
• 3D model
• Webcam integration and image capturing
• Creating a Flask-based local web server for monitoring and logging
• Scheduled feeding system with time-based triggers
• Frontend page for showing logs, photos, and live data
School of Global Convergence Studies
23
24. Cost
Our Smart Pet Feeder project cost a total of 45-50$ whichincludes all electronics, mechanical parts, and additional
materials needed to assemble the system.
raspberry pi3 25$ second hand
We used an ultrasonic sensor for food level detection, costing $1,
and an OLED/LCD screen for displaying system status, which cost
$2.
We spent $2.30 on breadboards and wires,
and $2 on the power adapter for stable operation.
Additional items like screws, glue, and small components cost about
$5."
School of Global Convergence Studies
24
25. Improvements from proposal
We used silicon to seal the container and preventmoituring
School of Global Convergence Studies
25
26. Improvements from proposal
For the main body of the feeder, we reusedeveryday waste materials such as a Pringles can
and a cardboard box. This approach is
environmentally friendly because it reduces waste
and gives discarded items a second life
School of Global Convergence Studies
26
27. Challenges
Hardware Challenges● Unstable load cell readings (needed recalibration many times)
● Wires disconnecting when the feeder moved
● Ultra-sonic unstable values(need average of 5 values )
School of Global Convergence Studies
27
28. Video Demo
Insert video hereSchool of Global Convergence Studies
28
29. Contribution
TM:Polotov Arlen(12235632)
–
Design, RaspPi config, 3d printing, sensor managing, create workflow, coding
functions and algorithms, group meetings managing
Sumiyaryenchin Anar Erdene 12235627
- Sketch, GPIO management, assisted with demonstration.
Adilbekov Adilbek
12235628
- Soldering, presentation, assisted with 3d modeling assembling.
Chagai Vladimir
12235620
- RaspPi initial config, RaspPi software setup, RaspPi troubleshooting, Feeder
assembling
Gartman Bekali
12235617
– 3d modelling, 3d printing, flask coding, assembling, soldering.
School of Global Convergence Studies
29
30. Coding Sources
Official Raspberry Pi GPIO documentationHX711 interface examples from GitHub
Servo control reference from gpiozero documentation
Luma.OLED official documentation
OpenCV Python examples for camera usage
Flask official documentation for web server setup
StackOverflow posts for debugging sensor issues
Raspberry Pi Forum – discussions about PWM jitter and I2C issues
School of Global Convergence Studies
30
31. Q&A
Q&ASchool of Global Convergence Studies