








 warfare
warfareSimilar presentations:










2 занятие устройство БПЛА (1)
1.
Устройство ипринцип действия
летательного аппарата типа
квадракоптер
2.
ВведениеПрежде чем перейти к
обсуждению устройства и
принципе действия
квадракоптера, давайте немного
разберёмся с терминами и
понятиями.
3.
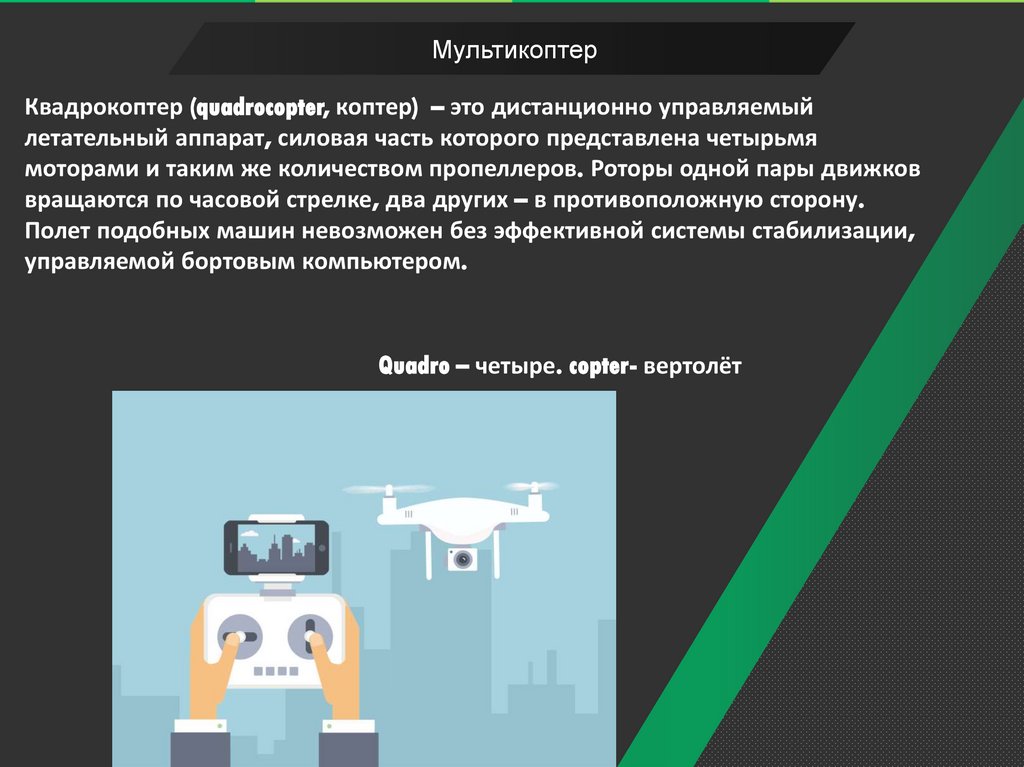
МультикоптерКвадрокоптер (quadrocopter, коптер) – это дистанционно управляемый
летательный аппарат, силовая часть которого представлена четырьмя
моторами и таким же количеством пропеллеров. Роторы одной пары движков
вращаются по часовой стрелке, два других – в противоположную сторону.
Полет подобных машин невозможен без эффективной системы стабилизации,
управляемой бортовым компьютером.
Quadro – четыре. copter- вертолёт
4.
Виды мультикоптеров5.
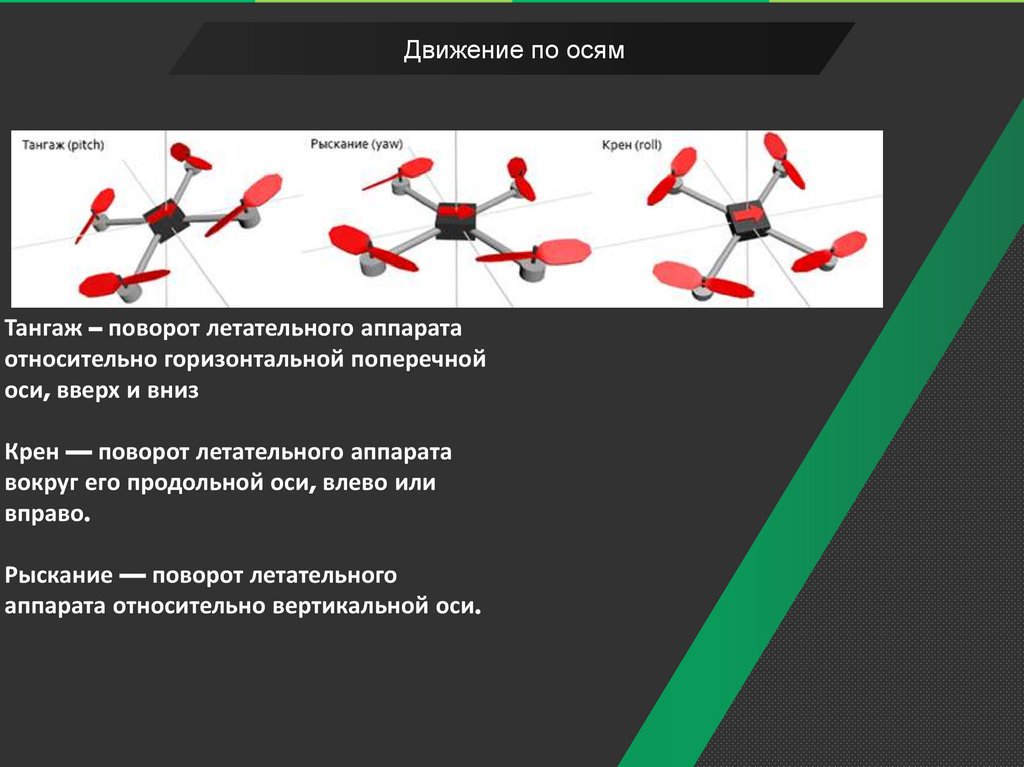
Движение по осямТангаж – поворот летательного аппарата
относительно горизонтальной поперечной
оси, вверх и вниз
Крен — поворот летательного аппарата
вокруг его продольной оси, влево или
вправо.
Рыскание — поворот летательного
аппарата относительно вертикальной оси.
6.
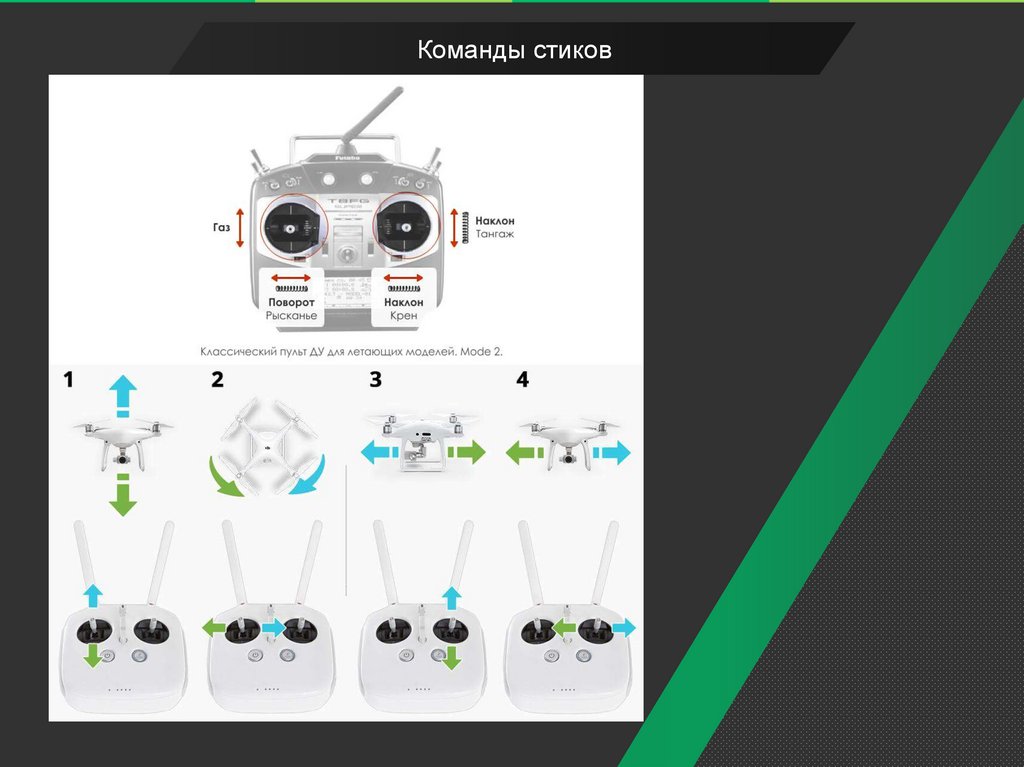
Управление квадракоптеромстики пульта управления
7.
Команды стиков8.
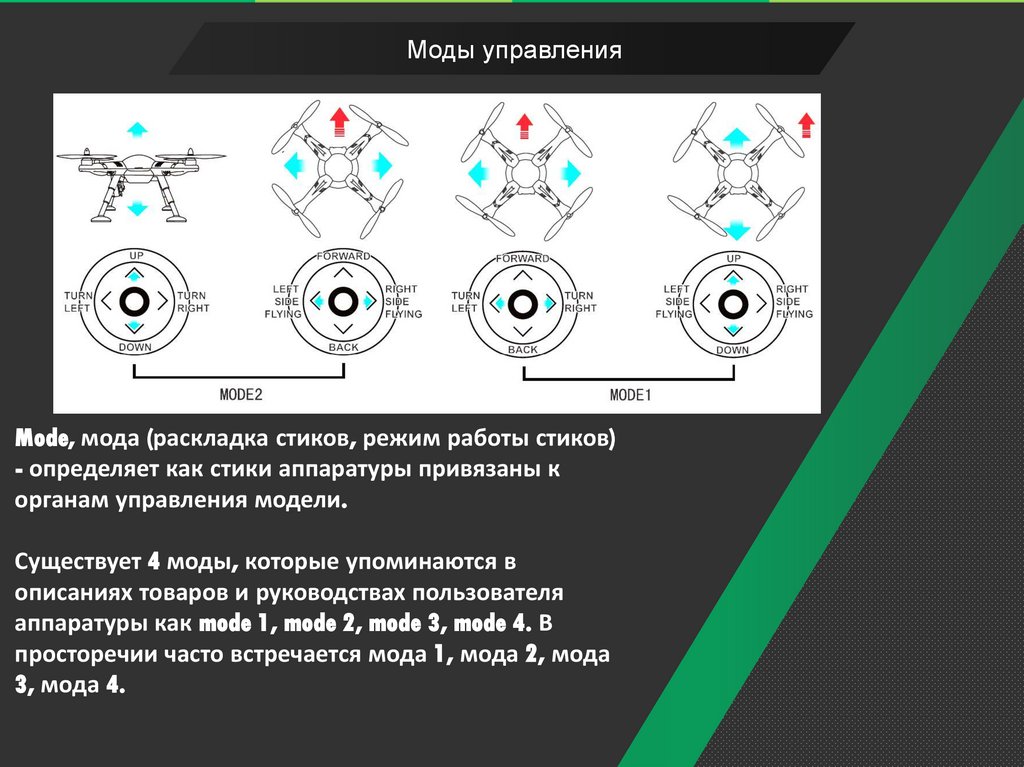
Моды управленияMode, мода (раскладка стиков, режим работы стиков)
- определяет как стики аппаратуры привязаны к
органам управления модели.
Существует 4 моды, которые упоминаются в
описаниях товаров и руководствах пользователя
аппаратуры как mode 1, mode 2, mode 3, mode 4. В
просторечии часто встречается мода 1, мода 2, мода
3, мода 4.
9.
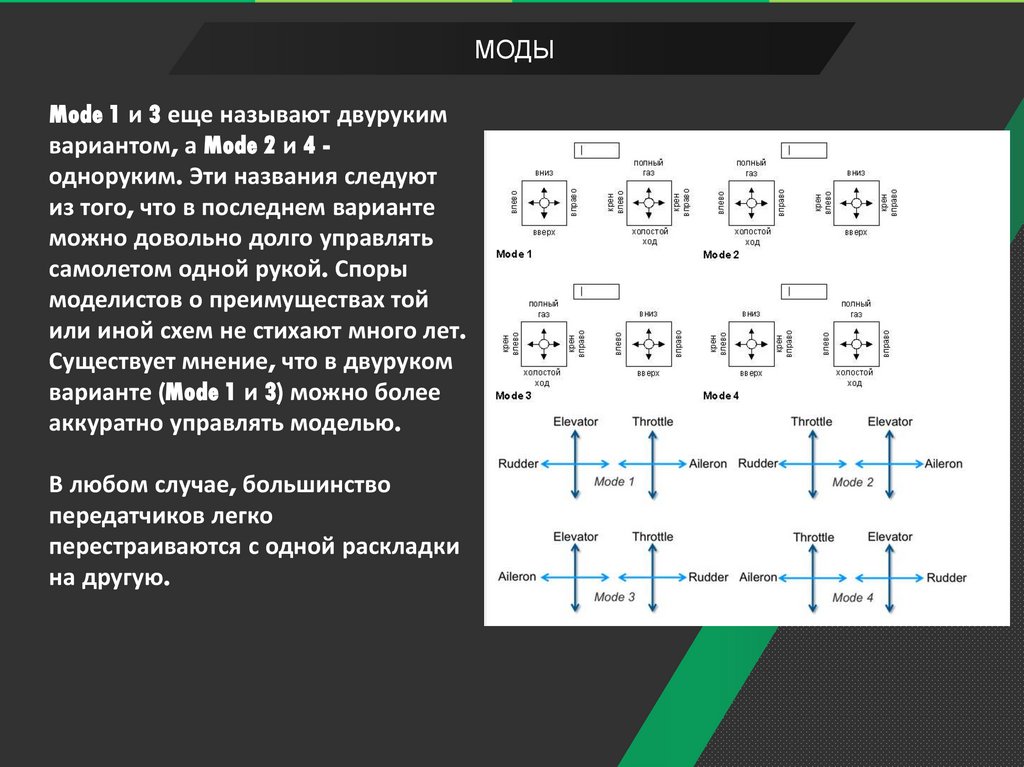
МОДЫMode 1 и 3 еще называют двуруким
вариантом, а Mode 2 и 4 одноруким. Эти названия следуют
из того, что в последнем варианте
можно довольно долго управлять
самолетом одной рукой. Споры
моделистов о преимуществах той
или иной схем не стихают много лет.
Существует мнение, что в двуруком
варианте (Mode 1 и 3) можно более
аккуратно управлять моделью.
В любом случае, большинство
передатчиков легко
перестраиваются с одной раскладки
на другую.
10.
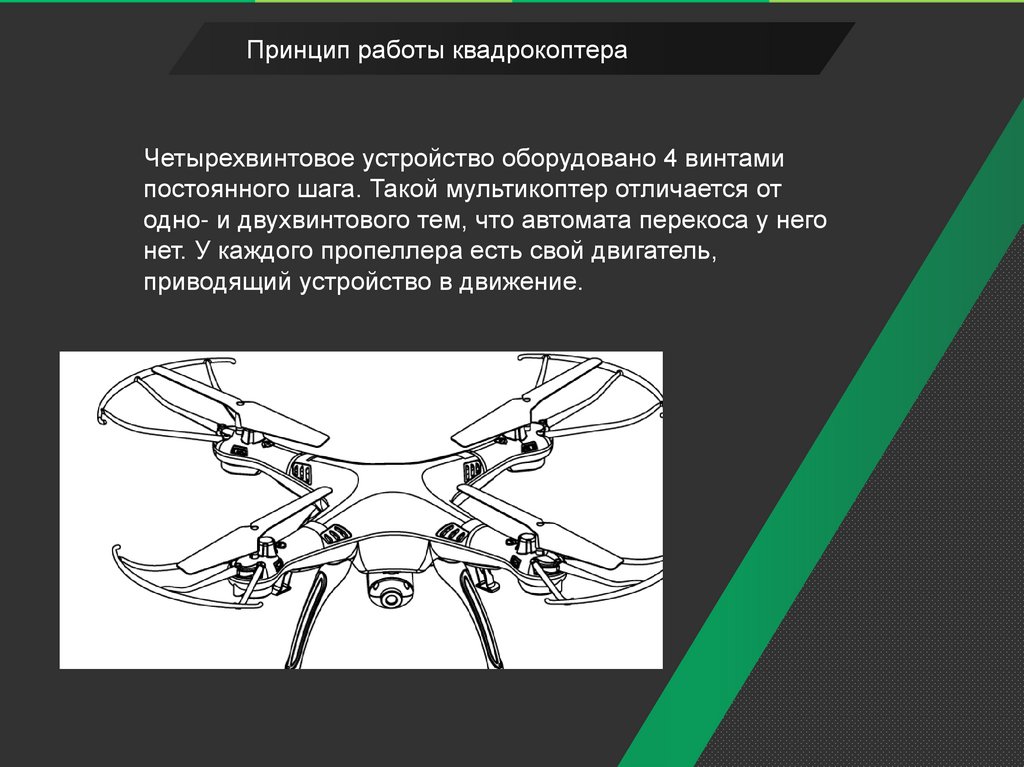
Принцип работы квадрокоптераЧетырехвинтовое устройство оборудовано 4 винтами
постоянного шага. Такой мультикоптер отличается от
одно- и двухвинтового тем, что автомата перекоса у него
нет. У каждого пропеллера есть свой двигатель,
приводящий устройство в движение.
11.
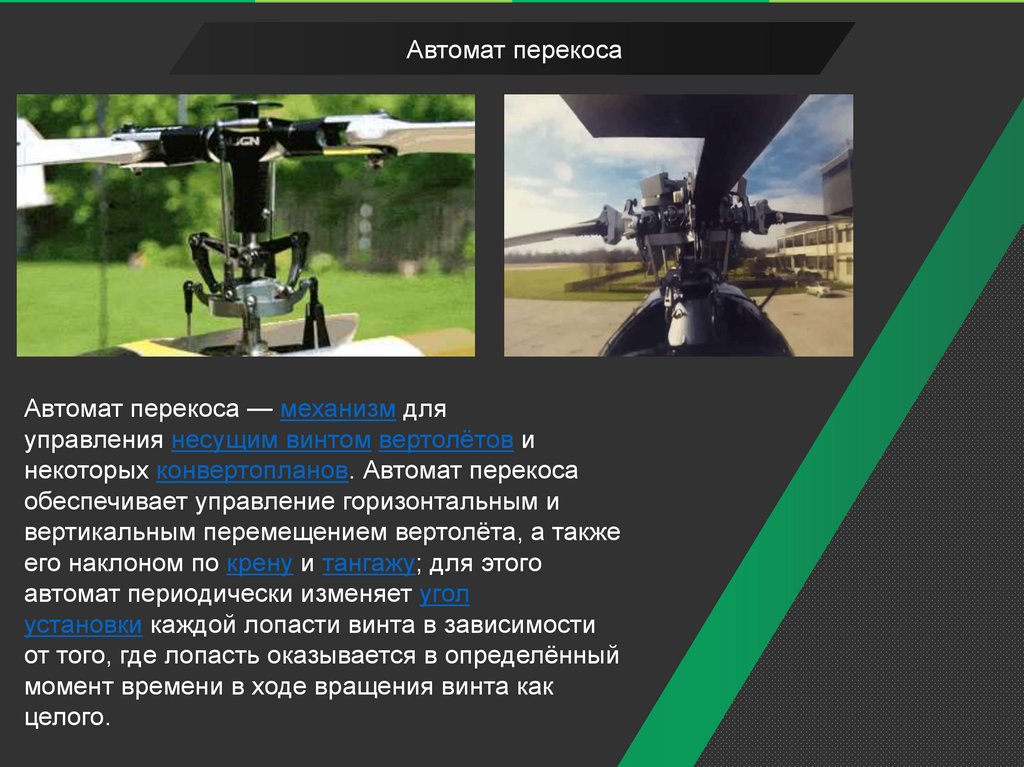
Автомат перекосаАвтомат перекоса — механизм для
управления несущим винтом вертолётов и
некоторых конвертопланов. Автомат перекоса
обеспечивает управление горизонтальным и
вертикальным перемещением вертолёта, а также
его наклоном по крену и тангажу; для этого
автомат периодически изменяет угол
установки каждой лопасти винта в зависимости
от того, где лопасть оказывается в определённый
момент времени в ходе вращения винта как
целого.
12.
Устройство квадрокоптера13.
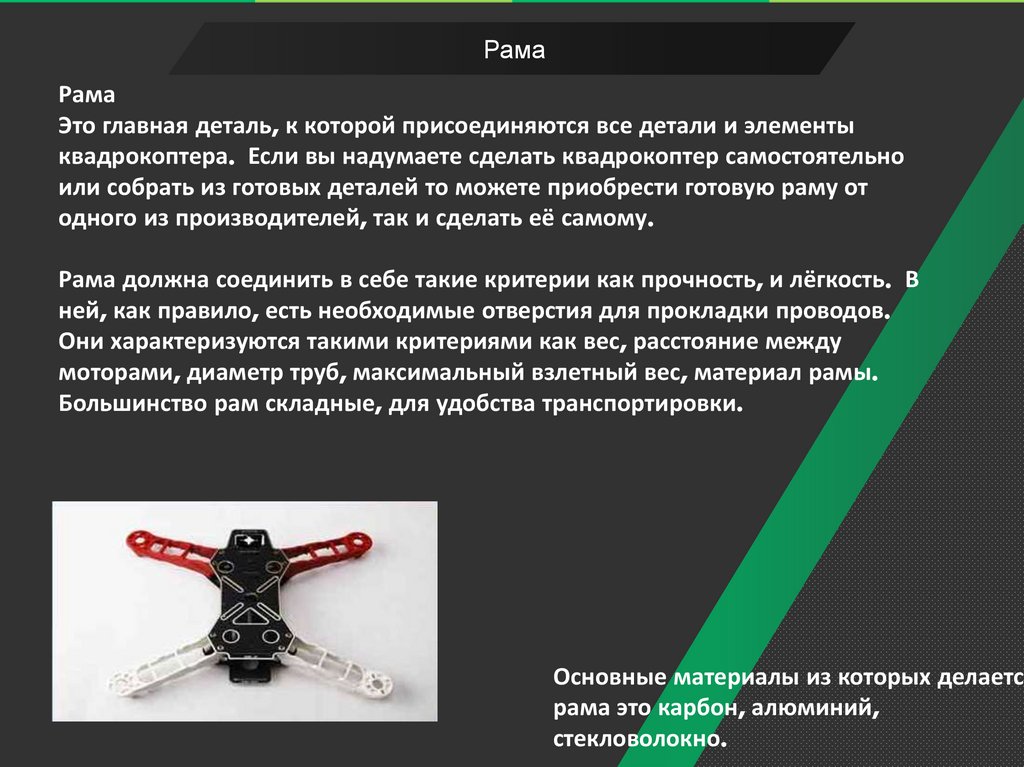
РамаРама
Это главная деталь, к которой присоединяются все детали и элементы
квадрокоптера. Если вы надумаете сделать квадрокоптер самостоятельно
или собрать из готовых деталей то можете приобрести готовую раму от
одного из производителей, так и сделать её самому.
Рама должна соединить в себе такие критерии как прочность, и лёгкость. В
ней, как правило, есть необходимые отверстия для прокладки проводов.
Они характеризуются такими критериями как вес, расстояние между
моторами, диаметр труб, максимальный взлетный вес, материал рамы.
Большинство рам складные, для удобства транспортировки.
Основные материалы из которых делается
рама это карбон, алюминий,
стекловолокно.
14.
Полётный контроллерОдной самой важной деталью устройства квадрокоптера является его
контроллер. К нему с помощью шлейфа подключаются барометр ,GPS,
акселерометр и все моторы. Контроллер обеспечивает функцию
координации, управления, стабилизации квадрокоптера в полёте и
управление им.
Чем большей функциональностью напичкана плата тем более разнообразен
будет полёт квадрокоптера
15.
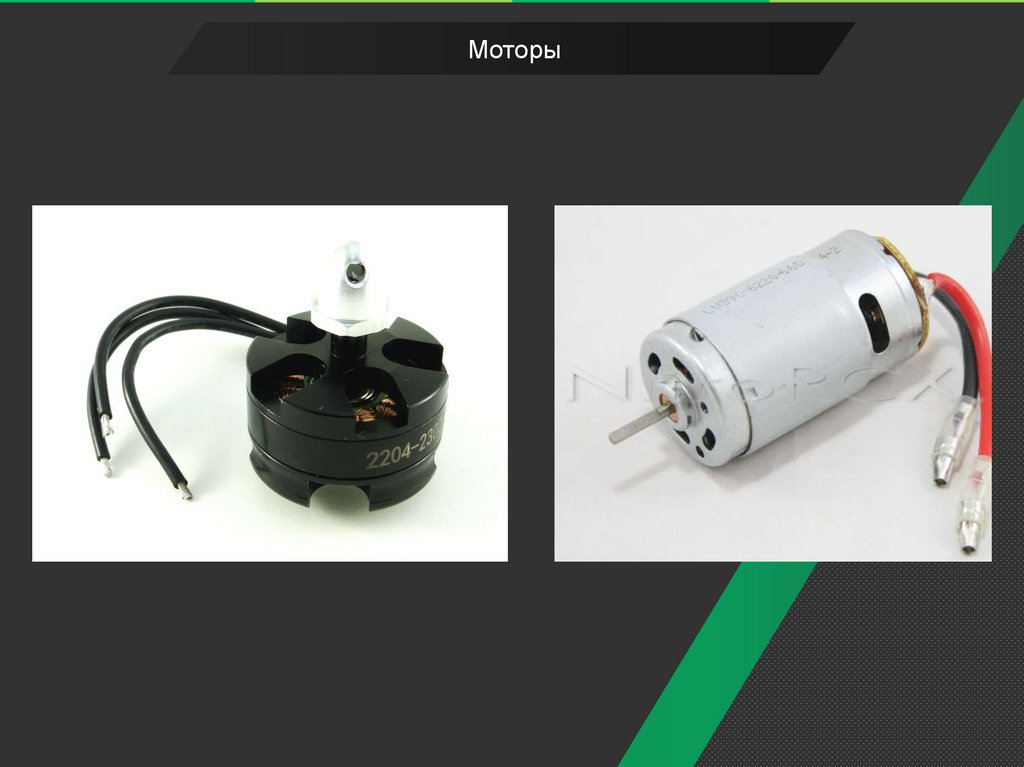
МоторыМоторы крепятся к раме квадрокоптера, всего 4 мотора. Функция моторов
крутить пропеллеры, и лётные характеристики напрямую зависят от тяги
мотора. Они имеют различные габариты, потребляемую мощность, то есть
ток. Двигатели квадрокоптера бывают коллекторными и бесколлекторными.
Моторы коллекторного типа устанавливаются в большинстве своём для
простых квадрокоптеров, они являются недорогими и подходят для
лёгких аппаратов, так как им не хватает тяги. Мало того они быстро
выходят из строя.
Моторы коллекторного типа с редуктором устанавливаются на большие
квадрокоптеры и готовы выдерживать аппараты потяжелее. Способны
поддерживать хорошую тягу и мощность. Они часто перегреваются и
шестерни выходят из строя.
Бесколлекторные моторы. Устанавливаются на дорогие модели.
Обеспечивают отличную тягу, долгую производительность, хорошую
управляемость и стабильность полёта. Стоимость и размеры двигателей
превосходят коллекторные типы моторов.
16.
Моторы17.
АккумуляторПри выборе аккумулятора квадрокоптера нужно учитывать его вес и
отдачу. Но, как правило, чем меньше вес тем меньше ёмкость. И
наоборот. Поэтому нужно найти компромисс. Сначала нужно
определить токоотдачу, а после уже выбирать вес, чтоб не
получилось так что квадрокоптер не сможет подняться.
Большим успехом пользуются литий-полимерные (LiPo)
аккумуляторы. Отличаются они низким уровнем саморазрядки,
возможностью пользования в большом диапазоне температур и
стабильным разряжением.
18.
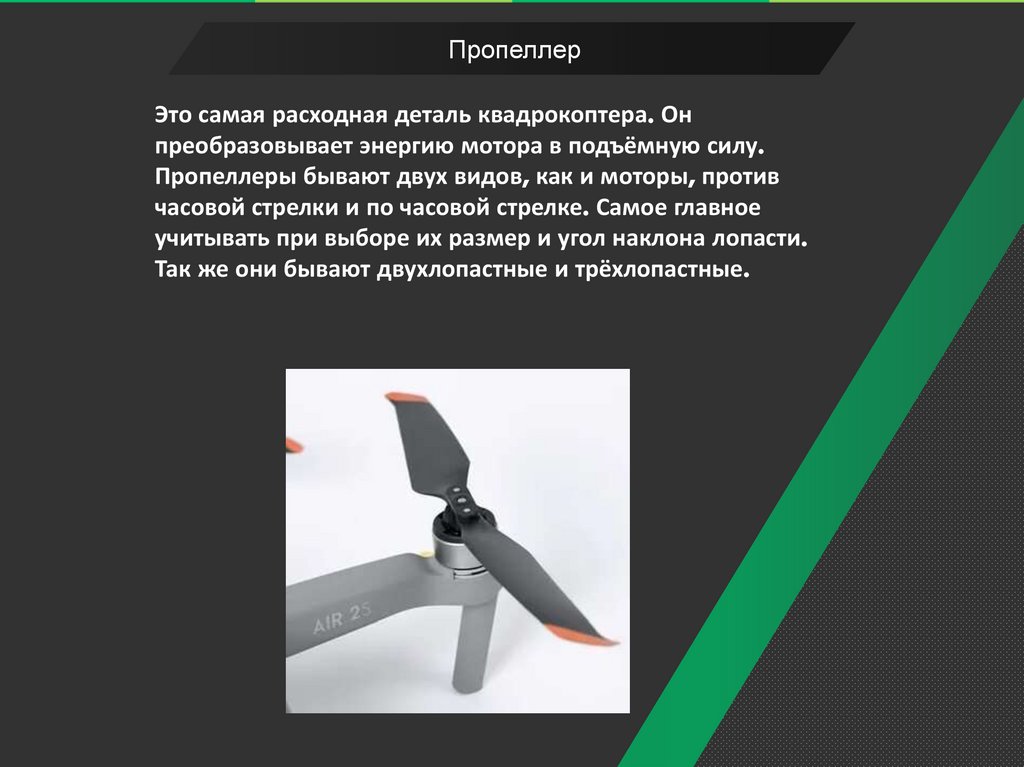
ПропеллерЭто самая расходная деталь квадрокоптера. Он
преобразовывает энергию мотора в подъёмную силу.
Пропеллеры бывают двух видов, как и моторы, против
часовой стрелки и по часовой стрелке. Самое главное
учитывать при выборе их размер и угол наклона лопасти.
Так же они бывают двухлопастные и трёхлопастные.
19.
Регулятор оборотовФункцией регулятора служит передача оборотов на мотор. Стоит обратить
внимание на алгоритмы быстрого отклика. Точная и быстрая реакция на
команды полетного контроллера приводят к улучшению стабильности и
управляемости мультикоптера, особенно при ветре.
20.
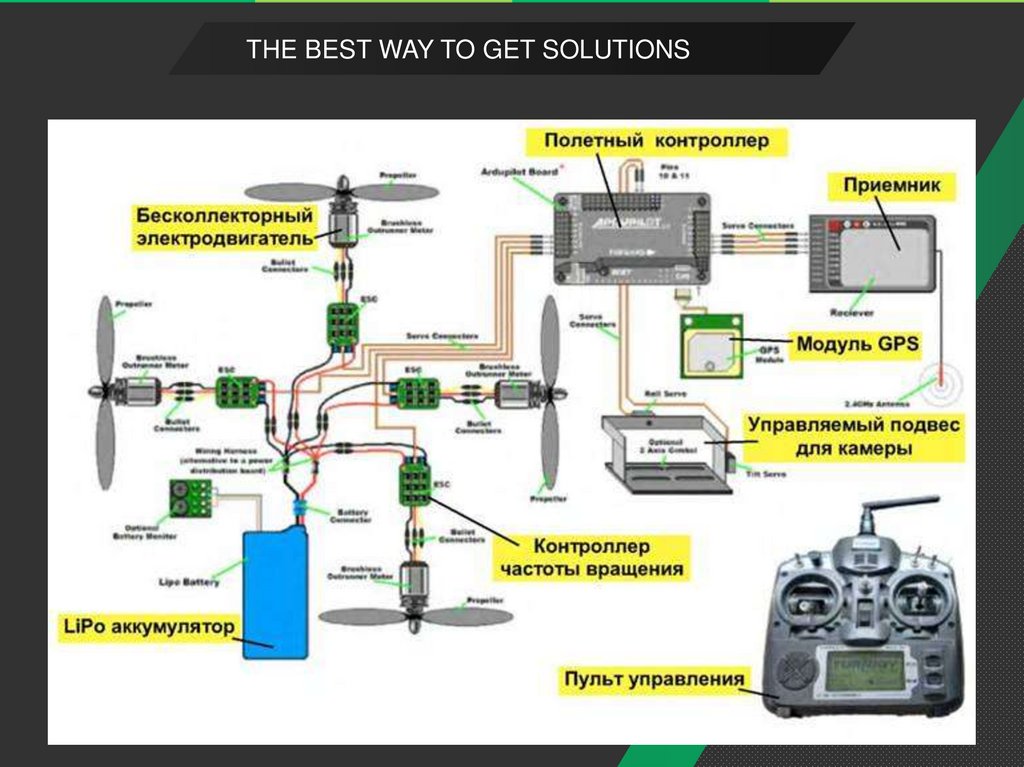
THE BEST WAY TO GET SOLUTIONS21.
THE BEST WAY TO GET SOLUTIONS22.
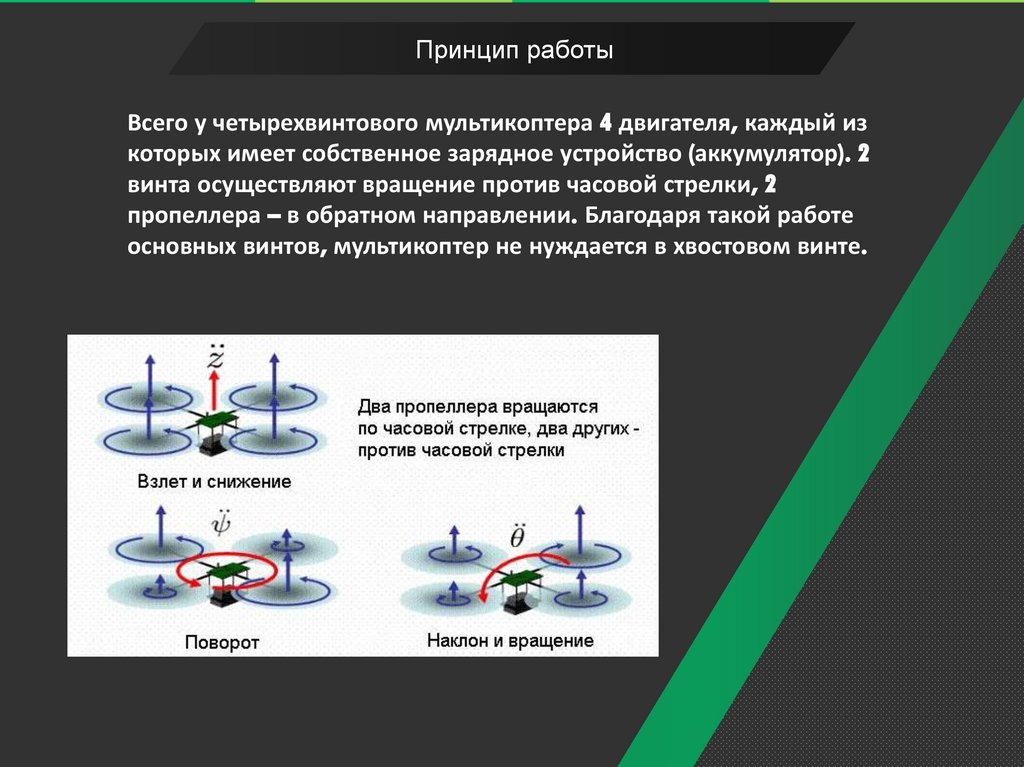
Принцип работыВсего у четырехвинтового мультикоптера 4 двигателя, каждый из
которых имеет собственное зарядное устройство (аккумулятор). 2
винта осуществляют вращение против часовой стрелки, 2
пропеллера – в обратном направлении. Благодаря такой работе
основных винтов, мультикоптер не нуждается в хвостовом винте.
23.
Маневрирование квадракоптераМаневрирование квадрокоптера осуществляется путем регулирования
скорости пропеллеров и происходит таким образом:
подъем устройства происходит путем ускорения всех четырех винтов;
движение конструкции в сторону происходит, когда с одной стороны
увеличивается скорость вращения пропеллеров, а с другой замедляется;
поворот устройства — вращающиеся против часовой стрелки
пропеллеры ускоряются, а те, что движутся по часовой стрелке,
замедляются.
24.
Устройство квадрокоптераВ квадрокоптере 4 винта, каждый из которых работает от собственного
двигателя. Все винты работают целостно. Контролировать работу устройства
получается благодаря микропроцессорной системе. Команды
радиоуправления передаются на устройство и системой переводятся в
команды каждому двигателю. Для стабильного зависания квадрокоптера в
воздухе, на них обязательно устанавливают 3 гироскопа. Это позволяет
зафиксировать позицию мультикоптера
25.
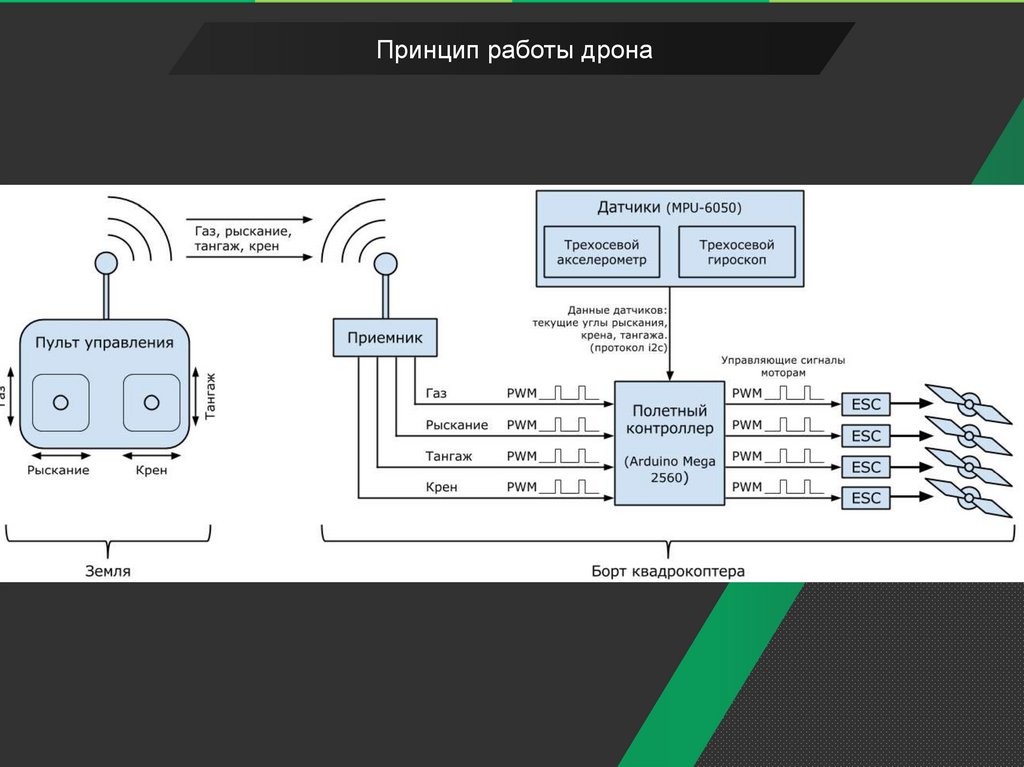
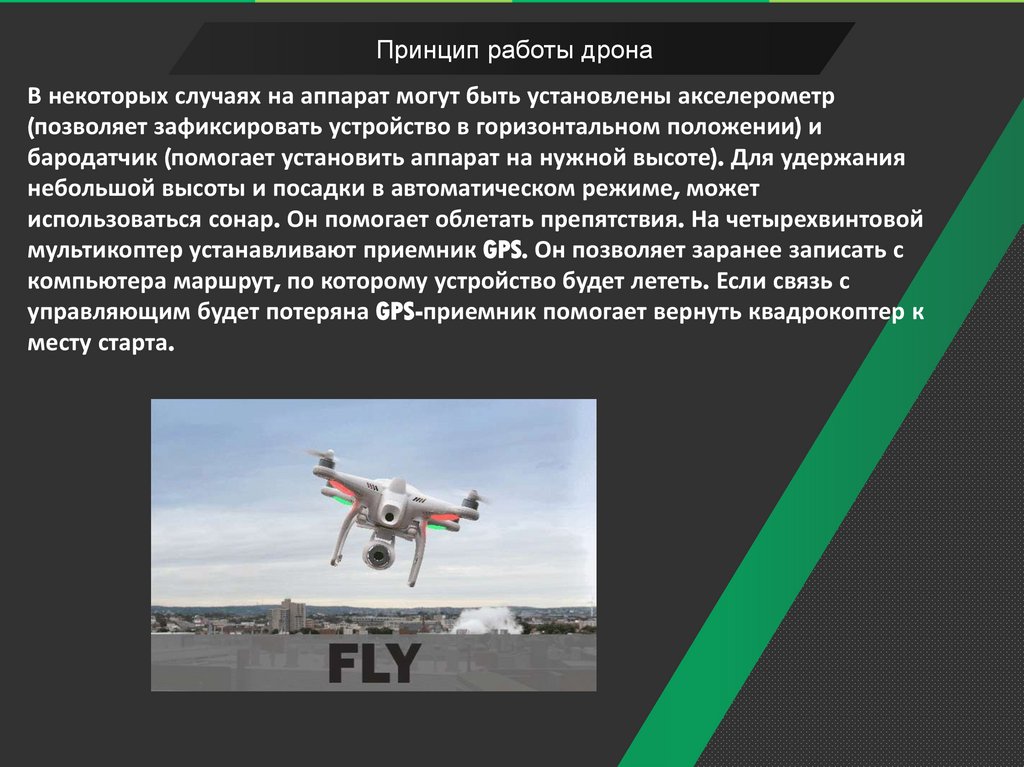
Принцип работы дрона26.
Принцип работы дронаВ некоторых случаях на аппарат могут быть установлены акселерометр
(позволяет зафиксировать устройство в горизонтальном положении) и
бародатчик (помогает установить аппарат на нужной высоте). Для удержания
небольшой высоты и посадки в автоматическом режиме, может
использоваться сонар. Он помогает облетать препятствия. На четырехвинтовой
мультикоптер устанавливают приемник GPS. Он позволяет заранее записать с
компьютера маршрут, по которому устройство будет лететь. Если связь с
управляющим будет потеряна GPS-приемник помогает вернуть квадрокоптер к
месту старта.
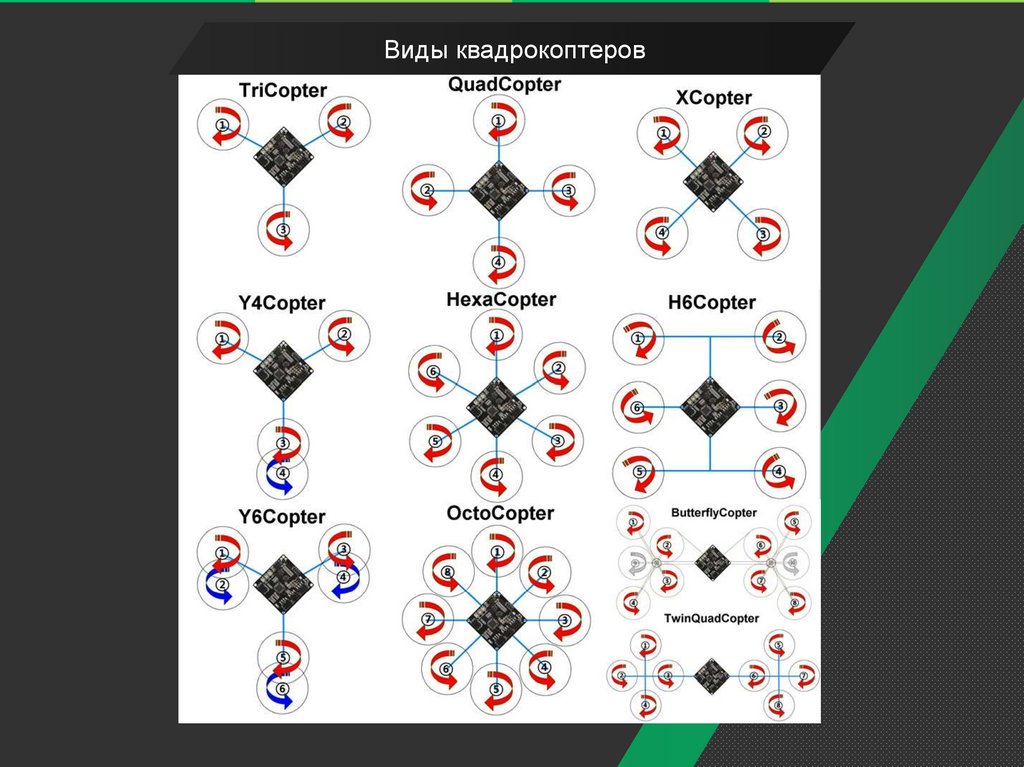
27.
Виды квадрокоптеров28.
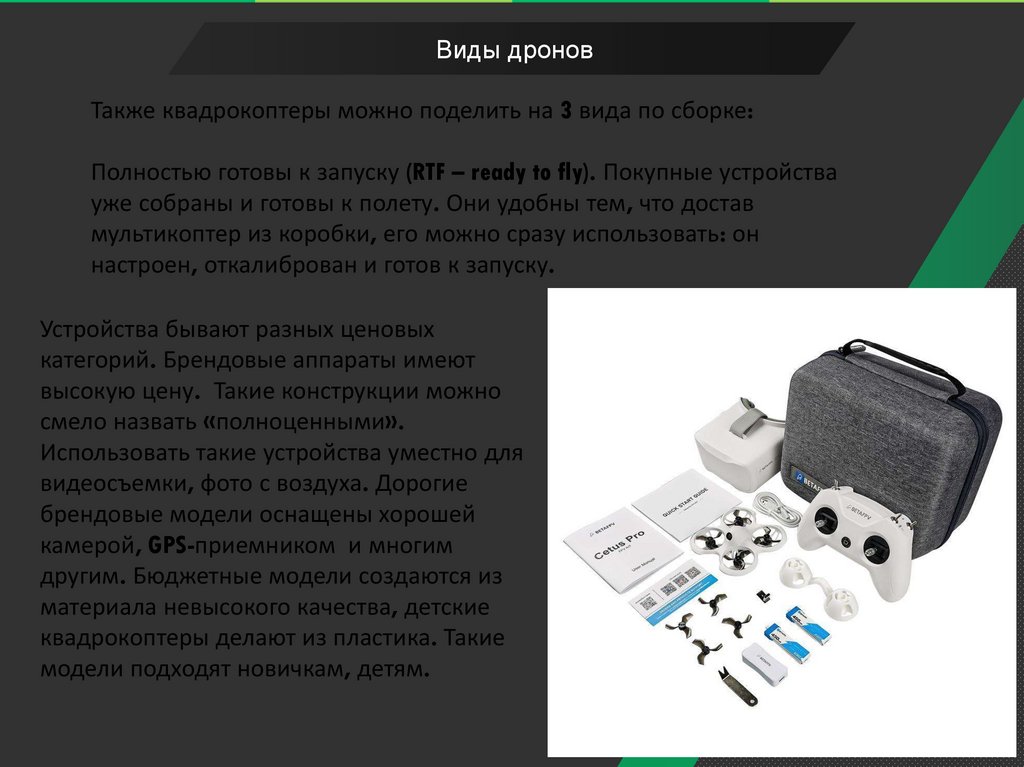
Виды дроновТакже квадрокоптеры можно поделить на 3 вида по сборке:
Полностью готовы к запуску (RTF – ready to fly). Покупные устройства
уже собраны и готовы к полету. Они удобны тем, что достав
мультикоптер из коробки, его можно сразу использовать: он
настроен, откалиброван и готов к запуску.
Устройства бывают разных ценовых
категорий. Брендовые аппараты имеют
высокую цену. Такие конструкции можно
смело назвать «полноценными».
Использовать такие устройства уместно для
видеосъемки, фото с воздуха. Дорогие
брендовые модели оснащены хорошей
камерой, GPS-приемником и многим
другим. Бюджетные модели создаются из
материала невысокого качества, детские
квадрокоптеры делают из пластика. Такие
модели подходят новичкам, детям.
29.
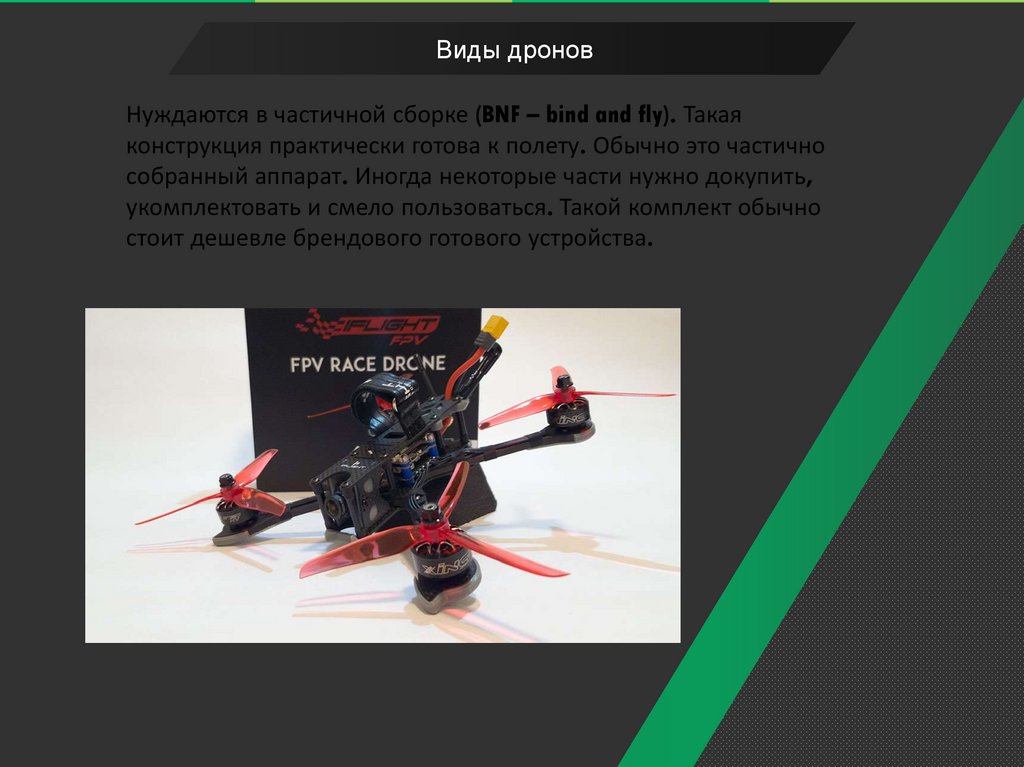
Виды дроновНуждаются в частичной сборке (BNF – bind and fly). Такая
конструкция практически готова к полету. Обычно это частично
собранный аппарат. Иногда некоторые части нужно докупить,
укомплектовать и смело пользоваться. Такой комплект обычно
стоит дешевле брендового готового устройства.
30.
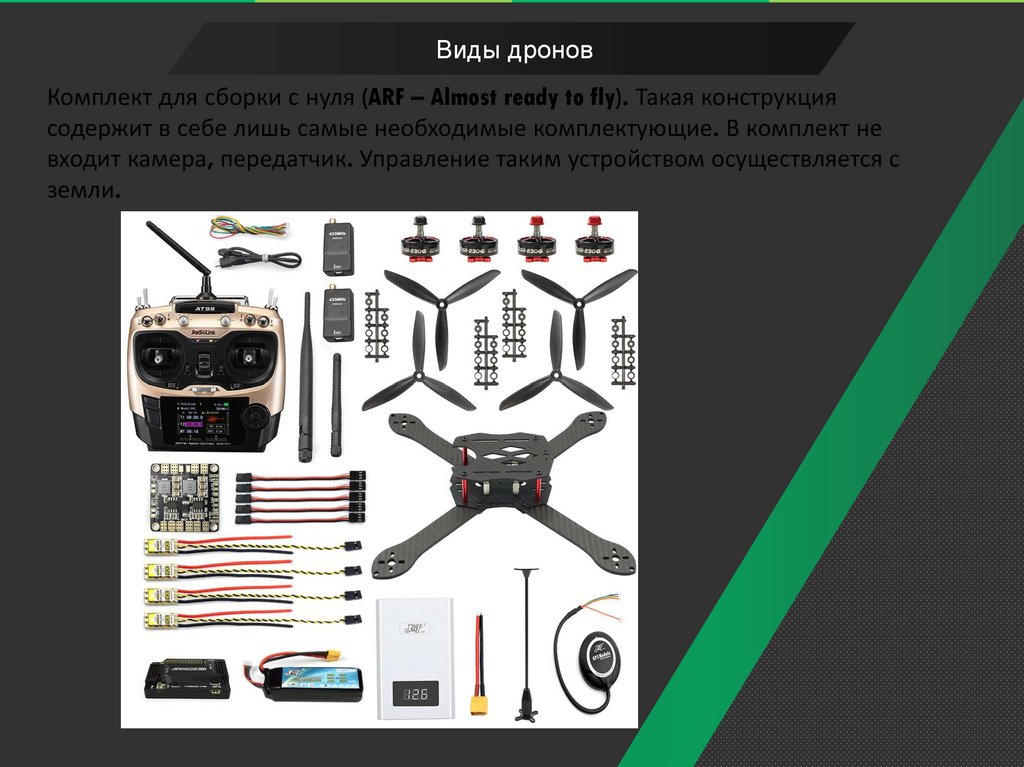
Виды дроновКомплект для сборки с нуля (ARF – Almost ready to fly). Такая конструкция
содержит в себе лишь самые необходимые комплектующие. В комплект не
входит камера, передатчик. Управление таким устройством осуществляется с
земли.
31.
устройство и принципы программированияЕсли рассуждать о глубине погружения в тему
программирования беспилотных летательных аппаратов,
можно выделить два «уровня»:
1. Планирование и закладка в аппарат полетного плана для
готового решения, а также последующий контроль его
исполнения. Этот уровень позволяет решать множество
очень интересных задач, хотя и ограничен возможностями
используемой платформы;
2. Создание собственной системы управления — своего рода
«системное программирование» в мире БПЛА.
32.
Виды программированияПрограммирование под готовые платформы выводит
летательные аппараты далеко за рамки класса «игрушек». Это
полноценная разработка, которая просто использует
библиотеки и функции автопилота для серийно выпускаемого
дрона (или для open source полетного контроллера), так что
создатель программы может сосредоточиться на решении
своей задачи, будь то аэрофотосъемка или воздушные
световые шоу.
Самое важное: программирование позволяет снять с оператора
часть задач по управлению в режиме реального времени, что
на самом деле упрощает применение БПЛА. Не у каждого
любителя фотосъемки найдется время и желание учиться
пилотировать дрон в сложных условиях.
33.
Где применяют?Конструкция определяет возможное применение. Сфер, где успели
«засветиться» беспилотные летательные аппараты уже довольно много.
Даже если говорить только о «гражданских» машинах (не
ориентированных на военных или спасателей), это:
• геодезия и картография;
• сельское хозяйство (в части контроля и обработки полей);
• фермерство;
• аэрофотосъемка,
• обычная фото и видео съемка;
• предпроектные исследования и контроль объектов строительства;
• доставка товаров;
• мониторинг протяженных объектов.
34.
ОбучениеДоступность обучающих комплектов уже потянула за собой массовое
появление как кружков по работе с дронами, так и всевозможных
мероприятий — семинаров, мастер-классов, олимпиад.
Например, в конце января в Точке кипения
Омского технического университета (ОГТУ)
проходил хакатон, посвященный
программированию дронов.
35.
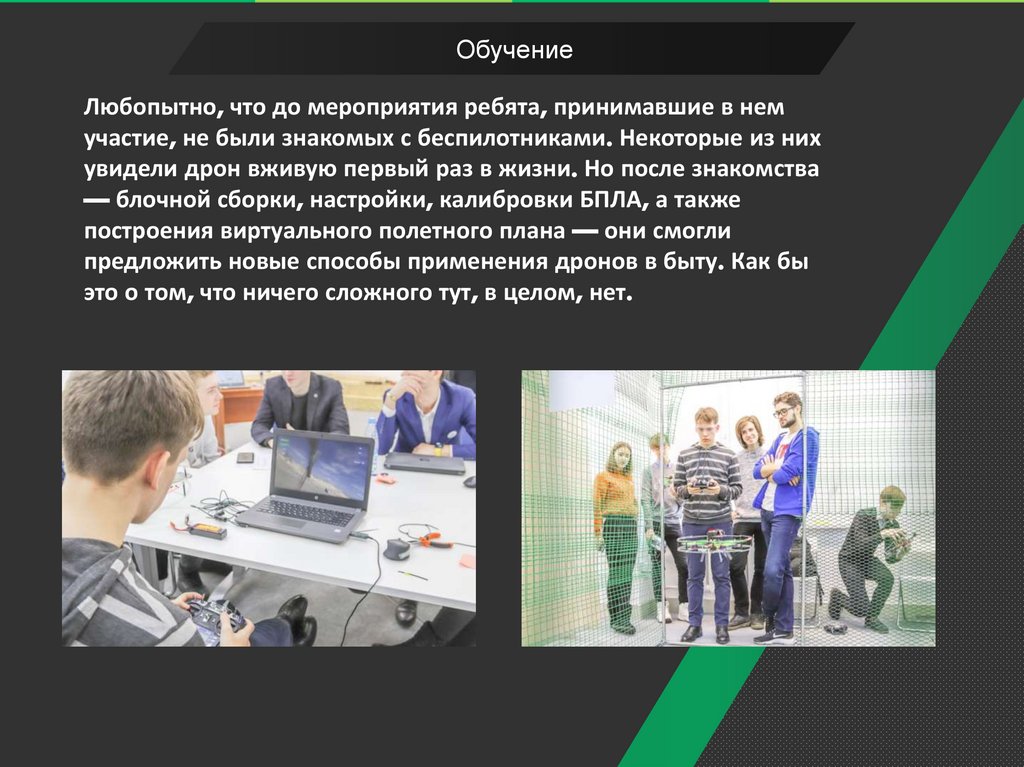
ОбучениеЛюбопытно, что до мероприятия ребята, принимавшие в нем
участие, не были знакомых с беспилотниками. Некоторые из них
увидели дрон вживую первый раз в жизни. Но после знакомства
— блочной сборки, настройки, калибровки БПЛА, а также
построения виртуального полетного плана — они смогли
предложить новые способы применения дронов в быту. Как бы
это о том, что ничего сложного тут, в целом, нет.
36.
Языки и среды обработкиВ двух словах программирование дрона сводится к
контролю координат промежуточных точек и высоты над
землей с одновременным управлением полезной
нагрузкой в зависимости от поставленной задачи.
Используемый для программирования язык, как и среда
разработки, определяется системой управления, а в случае
с проприетарными решениями — производителем
контроллера.
37.
Примеры программирования•Для программирования дрона DJI
необходимо зарегистрировать девелоперский аккаунт.
Далее необходимо скачать SDK с сайта производителя. У
DJI предусмотрены разные SDK в зависимости от того,
что планируется программировать — наземную станцию,
управление полезной нагрузкой или самим полетом.
Важно выбрать правильный и убедиться, что
имеющееся оборудование (будь то дополнительные
датчики дрона или мобильное устройство)
поддерживается. Дальнейший процесс рассмотрим на
примере мобильного SDK.
SDK включает:
фреймворк и необходимые библиотеки, которые
импортируются в мобильное приложение дрона подSDK
SDK (от англ. software development kit —
Android или iOS;
«комплект для разработки программного
•инструмент симуляции и визуализации полета;
•вспомогательные инструменты для iOS;
обеспечения») — набор средств разработки,
позволяющий специалистам по программному
обеспечению создавать приложения для
определённого пакета программ,
программного обеспечения базовых средств
разработки, аппаратной платформы,
компьютерной системы, игровых консолей,
операционных систем и прочих платформ.
38.
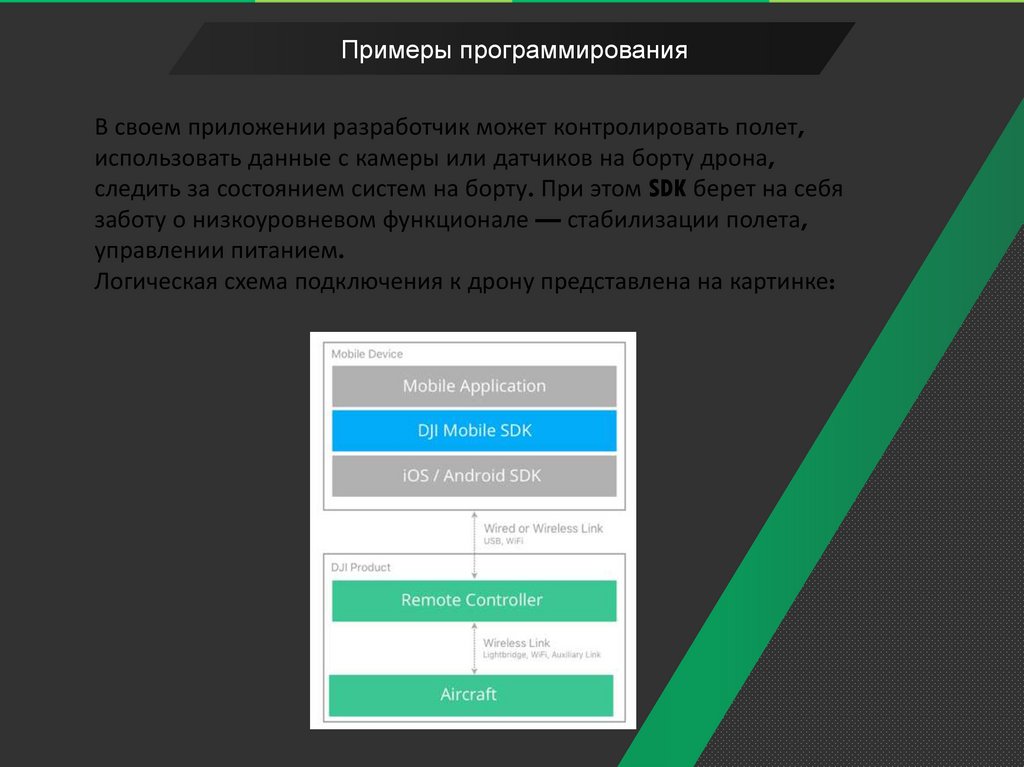
Примеры программированияВ своем приложении разработчик может контролировать полет,
использовать данные с камеры или датчиков на борту дрона,
следить за состоянием систем на борту. При этом SDK берет на себя
заботу о низкоуровневом функционале — стабилизации полета,
управлении питанием.
Логическая схема подключения к дрону представлена на картинке:
39.
Примеры программированияПрежде чем приступать к разработке, необходимо
сгенерировать для приложения уникальный App Key, который
активирует SDK.
Сам процесс разработки зависит от рассматриваемой
платформы (iOS или Android). Подробно и для Android, и для iOS
он описан в документации, а на GitHUB есть примеры
простейших приложений для каждой из этих платформ. Есть
замечательное видео, описывающее весь процесс создания
простейшего приложения.
Для запуска скомпилированное приложение необходимо
перенести на мобильное устройство. Непосредственно перед
запуском устройство также надо подключить к дрону по Wi-Fi
или через USB-кабель (тип подключения зависит от
конкретного устройства).
40.
Пример программированияPixracer — одно из поколений полетного контроллера Pixhawk, который
широко используется в DIY-проектах.
Для программирования этого полетного контроллера используется
библиотека ROS (Robot Operating System), которая позволяет управлять
дронами с помощью MAVLink (пакет называется MAVROS). Писать можно на
Python, используя клиент для этой библиотеки под названием rospy.
Для запуска приложения необходимо подключиться по SSH к полетному
контроллеру.
С DIY-проектами процедуру программирования в общем виде описать
гораздо сложнее, нежели с проприетарными решениями, поскольку слишком
многое зависит от деталей прошивки. Для kit-комплектов, которые зачастую