 electronics
electronicsSimilar presentations:







")


Типы космических систем, космических комплексов и их состав. Управление КА. Тема 2. Лекция 3
1.
Тема 2 Типы космических систем,космических комплексов и их состав.
Лекция 3 Управление КА
1
2.
Цели занятия:1. Формировать у студентов теоретические
знания по тематике изучаемых вопросов
занятия.
2. Сконцентрировать внимание обучающихся на
наиболее сложных вопросах рассматриваемой
темы занятия.
3. Стимулировать активную познавательную
деятельность обучающихся и способствовать
формированию творческого мышления.
2
3.
Учебные вопросы:1.
2.
3.
4.
Автономная система управления КА.
Управление КА НИП.
Измерение координат КА.
Баллистические задачи при управлении КА.
3
4.
Литература:1. Гордиенко Н.И. Космонавтика: иллюстрированная
энциклопедия. – М.: Эксмо, 2010. – 256 с.
2. Стрельников А.Т., Мальцев В.В. Тексты лекций по
космической тематике. – М.: ВА РВСН им. Петра Великого, 1998.
3. Гущин В.Н. Основы устройства космических аппаратов:
учебник для вузов. – М.: Машиностроение, 2003. – 272 с.
4
5.
Учебный вопрос 1Автономная система управления КА.
5
6.
Управление КА осуществляется на различных этапахполёта по-разному. На активном участке вывода КА на
рабочую орбиту управление ведётся с помощью
автономной системы управления ракеты-носителя. При
этом работа всех систем ракеты-носителя контролируется
телеметрическими
и
траекторными
системами,
расположенными
вдоль
трассы
вывода.
При
использовании разгонного блока управление им
осуществляется его системой управления.
После вывода КА на орбиту и отделения его от ракетыносителя управление берёт на себя автономная система
управления КА и наземный комплекс управления.
6
7.
Автономнаясистема
управления
обеспечивает
жизнедеятельность КА в полёте и выполнение целевой задачи
космической системы. Она удерживает КА на заданном участке
орбиты, обеспечивает его ориентацию относительно Земли,
стабилизацию КА и осуществляет управление приборами,
решающими целевую задачу системы.
Автономная система управляет подсистемами электропитания,
терморегулирования и другими служебными системами КА.
Одной из наиболее важных задач, решаемых автономной
системой, является парирование нештатных ситуаций, возникающих
на борту КА, путём их выявления и устранения за счёт использования
резервной (дублирующей) аппаратуры и алгоритмического обхода
неисправных элементов.
Работа автономной системы управления проводится по
«жёстким» и «гибким» программам.
7
8.
В составе системы управления имеется программновременное устройство (ПВУ), в памяти которого записаны«жёсткие» программы работы бортовых приборов с привязкой ко
времени.
«Гибкие» программы работы бортовых систем закладываются
с Земли в виде так называемых «числовых уставок», попадающих
в память ПВУ и реализующихся по мере совпадения бортового
времени с моментами времени, записанными в ПВУ. Примером
исполнения «гибких» программ является сеанс коррекции орбиты
КА. В нужные моменты времени происходит необходимая
ориентация и стабилизация КА, включение и выключение
двигательной установки, перевод КА в рабочее положение на
орбите после проведения коррекции.
Для получения управляющей информации (команд) с Земли и
передачи на Землю телеметрической (а иногда и целевой)
информации служит бортовая радиотехническая система.
8
9.
Учебный вопрос 2Управление КА НИП
9
10.
Процесс управления КА включает в себярешение трёх основных задач:
• Определение положения КА в пространстве;
• Получение данных о состоянии бортовых
систем КА;
• Формирование на основе полученных данных
о положении и состоянии КА команд
управления и выдачу их на КА с целью
выполнения им целевой задачи.
10
11.
Первая задача решается наземными средствами траекторныхизмерений, которые измеряют координаты положения КА в
пространстве. По этим данным определяется орбита КА и даётся прогноз
его движения на определённый период времени, зависящий от точности
траекторных измерений и высоты его рабочей орбиты.
Следует отметить, что в настоящее время для определения
положения КА в пространстве начинает использоваться бортовая
навигационная аппаратуры ГЛОНАСС (либо GPS).
Состояние бортовых систем КА определяется с помощью
телеметрической системы, которая включает в себя бортовую систему,
состоящую из подсистемы бортовых контрольных датчиков параметров
контролируемых узлов, подсистемы сбора данных от этих датчиков и
передатчика, с помощью которого контролируемые данные передаются
на Землю.
На Земле приём телеметрических данных ведётся телеметрическими
станциями, которые после необходимой обработки представляют эти
данные для анализа специалистам.
11
12.
Баллистические данные о положении КА в пространстве ителеметрические данные о состоянии бортовых систем поступают
в Центр управления полётов КА.
На основе анализа полученных данных, а также данных от
Центра управления космической системой (ЦУС), принимается
решение о дальнейшей работе КА по выполнению целевой
задачи, формируются необходимые команды управления,
привязанные ко времени, и в виде программы сеанса передаются
на наземную станцию, откуда в заданные моменты времени по
командной радиолинии передаются для исполнения на борт КА.
Центр управления космической системой представляет собой
совокупность технических средств и программного обеспечения, с
помощью которых персонал ЦУС обеспечивает контроль работы
бортовых и наземных средств космической системы, формирует
соответствующие воздействия на них для обеспечения
выполнения космической системой целевой задачи.
12
13.
Решение указанных основных задач на Земле можетосуществляться специализированными станциями траекторных
измерений, телеметрическими и командными станциями с
использованием для каждой станции специального радиоканала.
Однако более удобным оказывается решать указанные задачи
одной станцией с использованием общего радиоканала для
обмена с КА всеми видами информации. Такая станция называется
командно-измерительной станцией слежения (КИС).
В составе НКУ КА обычно используются несколько таких
станций.
Это позволяет увеличивать время радиоконтакта наземных
средств с КА, что необходимо для реализации процесса
управления КА.
13
14.
Учебный вопрос 3Измерение координат КА.
14
15.
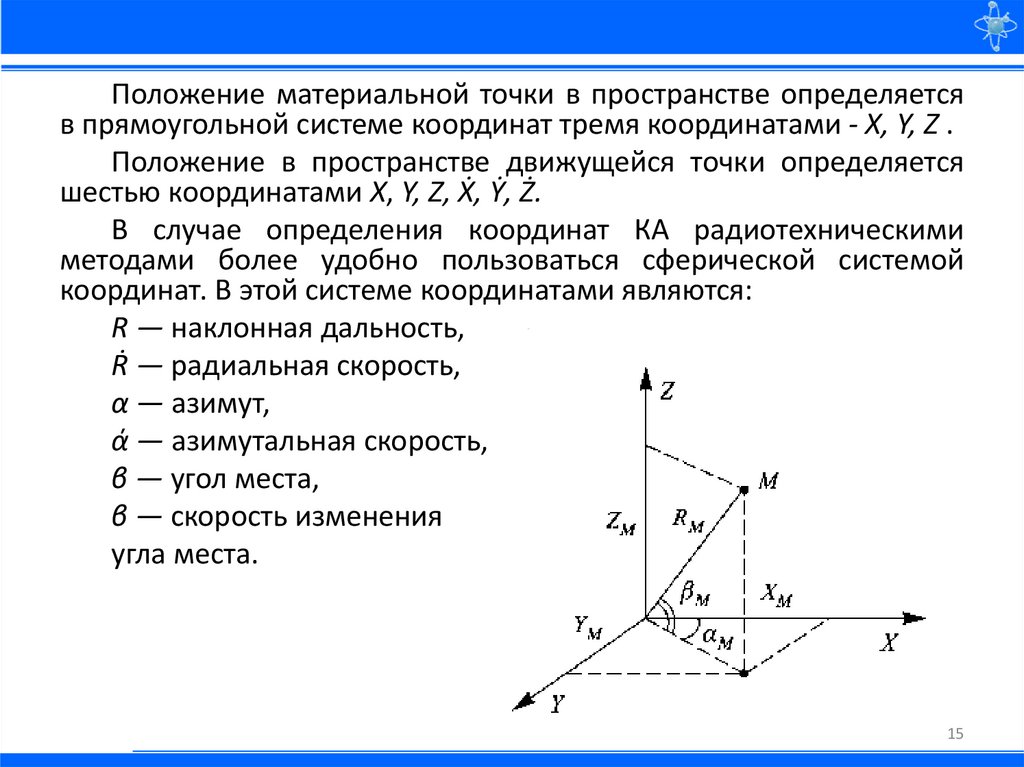
Положение материальной точки в пространстве определяетсяв прямоугольной системе координат тремя координатами - X, Y, Z .
Положение в пространстве движущейся точки определяется
шестью координатами X, Y, Z, Ẋ, Ẏ, Ż.
В случае определения координат КА радиотехническими
методами более удобно пользоваться сферической системой
координат. В этой системе координатами являются:
R — наклонная дальность,
Ṙ — радиальная скорость,
α — азимут,
ά — азимутальная скорость,
β — угол места,
β — скорость изменения
угла места.
15
16.
Координаты из прямоугольной системы легкопересчитываются в сферическую и обратно. Дальность
(R) измеряется дальномерным способом, радиальная
скорость (Ṙ) по доплеровскому приращению частоты
сигнала, угловые координаты (α, ά, β, β) измеряются с
помощью фазовых угломерных систем.
Однако на практике при определении орбиты КА
может оказаться более удобным использовать другой
набор измеряемых параметров, но при этом должно
быть выполнено требование о независимых
измерениях шести параметров движения КА.
16
17.
Такими наборами измеряемых параметров движения КА могут быть:Три пары измерений R, Ṙ (R1,Ṙ1, R2 , Ṙ2, R3 , Ṙ3 ), производимых в одно
(или близкое) время с трёх разнесённых территориально измерительных
пунктов;
Шесть измерений Ṙ с шести измерительных пунктов;
Шесть измерений дальности R с одного пункта в разное время.
Возможны и другие варианты набора измеряемых параметров. При
этом все измерения должны быть независимыми.
При изменении взаимного положения КА и измерительной станции
за счёт эффекта Доплера происходит изменение частоты сигнала,
излучаемого КА и принимаемого измерительной станцией (ИС).
При приближении КА принимаемая частота выше излучаемой и эта
разница уменьшается. При минимальном расстоянии КА от ИС
(траверсное расстояние) принимаемая частота становится равной
излучаемой. При удалении КА от ИС принимаемая частота становится
ниже излучаемой.
17
18.
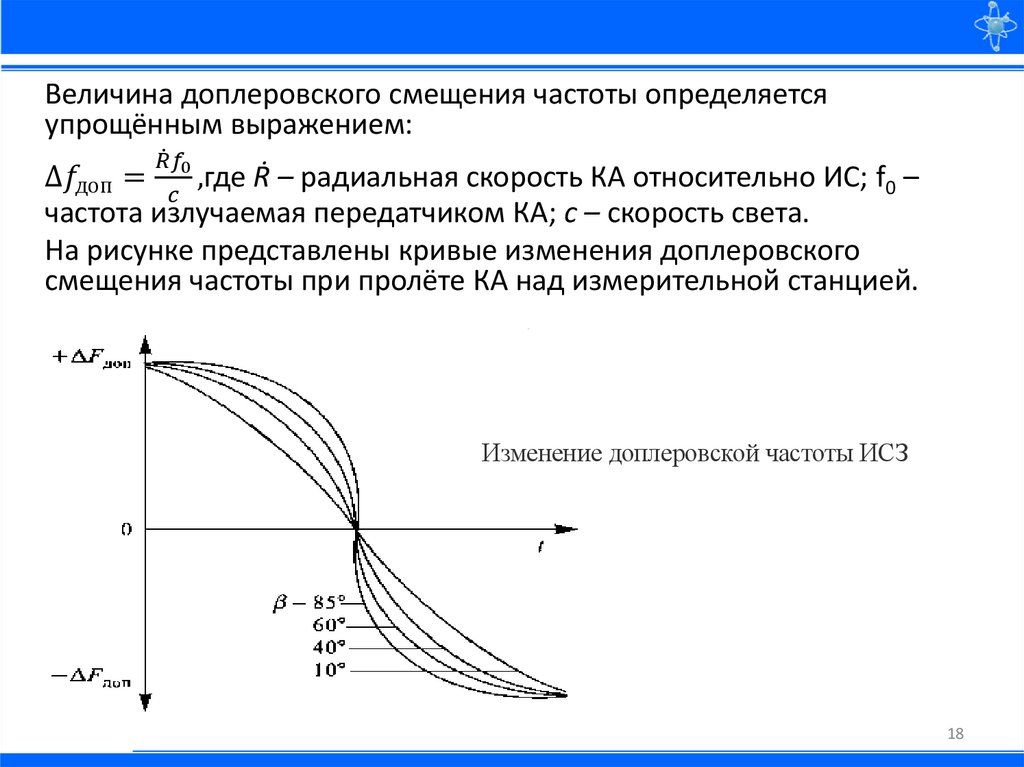
Величина доплеровского смещения частоты определяетсяупрощённым выражением:
ሶ