


 electronics
electronicsSimilar presentations:
")

")







Разрешающая способность системы и выбор числа строк разложения
1. 1.5 Разрешающая способность системы и выбор числа строк разложения
Разрешающая способность характеризует способность системы раздельновоспроизводить мелкие детали изображения.
Разрешающая способность Rр системы определяется
максимальной пространственной частотой, при которой
обеспечивается пороговый контраст воспроизводимого на
экране изображения предельно контрастной синусоидальной
или штриховой миры для визуальных систем, либо пороговое
отношение сигнала к шуму на выходе видеотракта от той же
миры для автоматических систем.
От разрешающей способности системы зависит четкость изображения.
Rр оценивают в двух направлениях: вдоль и поперек строк.
Rр (как и пространственную частоту) измеряют в телевизионных линиях
приходящихся на высоту растра h.
1
2.
В любом направлении:Rp h l .
где l - ширина воспроизводимого штриха миры на пороге ее различения;
h=Zalc, где lc – ширина строки, тогда:
Rp Z a lc l .
При l=lc имеем Rp=Za.
В оптике разрешающую способность принято измерять числом пар
предельно различимых черных и белых линий миры, приходящихся на один
миллиметр. Если обозначить эту величину через Np, лин./мм, а высоту
растра на фотопреобразователе или экране через h, то получим:
Rp 2 N p h.
2
3.
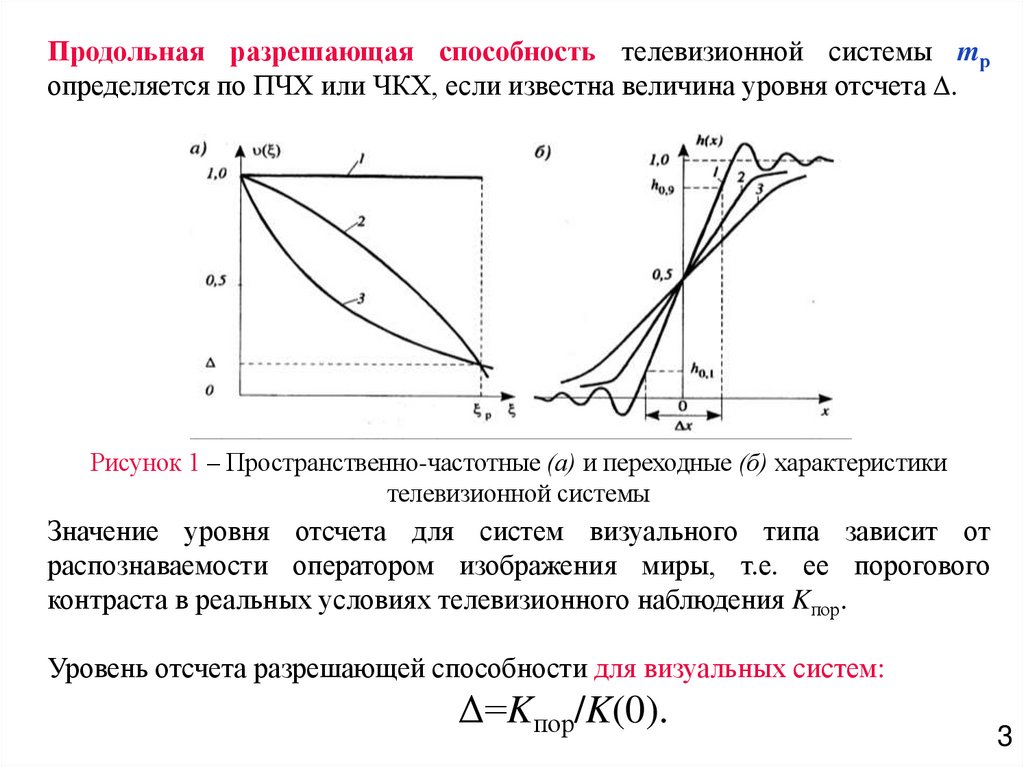
Продольная разрешающая способность телевизионной системы mропределяется по ПЧХ или ЧКХ, если известна величина уровня отсчета .
Рисунок 1 – Пространственно-частотные (а) и переходные (б) характеристики
телевизионной системы
Значение уровня отсчета для систем визуального типа зависит от
распознаваемости оператором изображения миры, т.е. ее порогового
контраста в реальных условиях телевизионного наблюдения Kпор.
Уровень отсчета разрешающей способности для визуальных систем:
Δ=Kпор/K(0).
3
4.
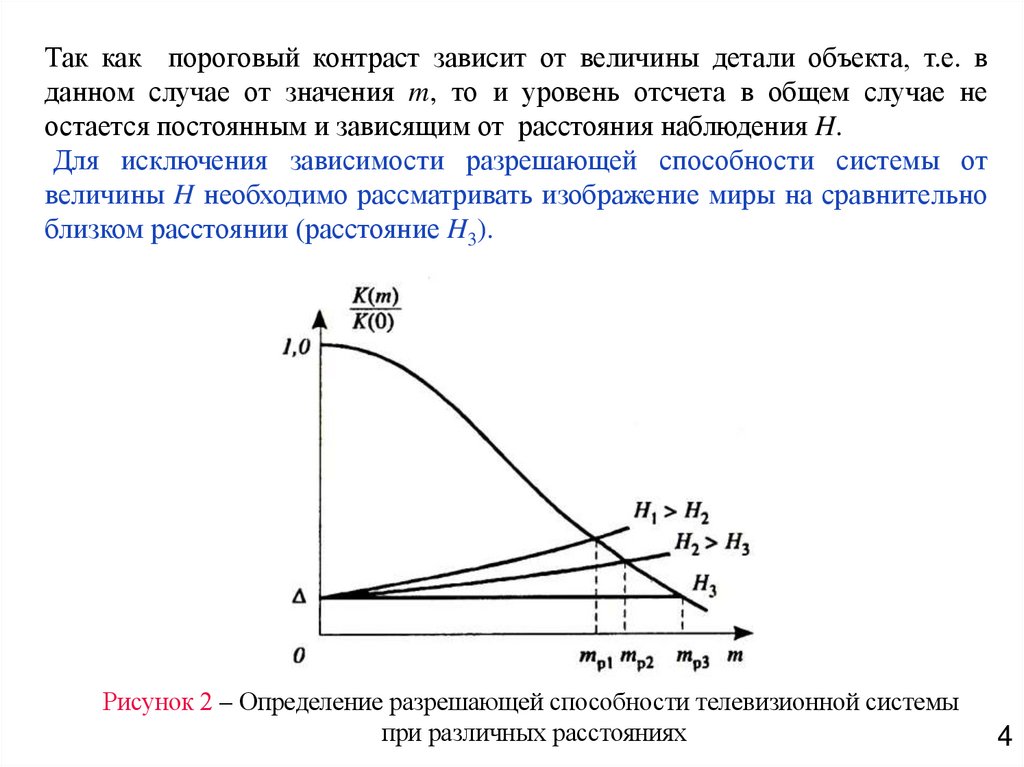
Так как пороговый контраст зависит от величины детали объекта, т.е. вданном случае от значения m, то и уровень отсчета в общем случае не
остается постоянным и зависящим от расстояния наблюдения H.
Для исключения зависимости разрешающей способности системы от
величины H необходимо рассматривать изображение миры на сравнительно
близком расстоянии (расстояние H3).
Рисунок 2 – Определение разрешающей способности телевизионной системы
при различных расстояниях
4
5.
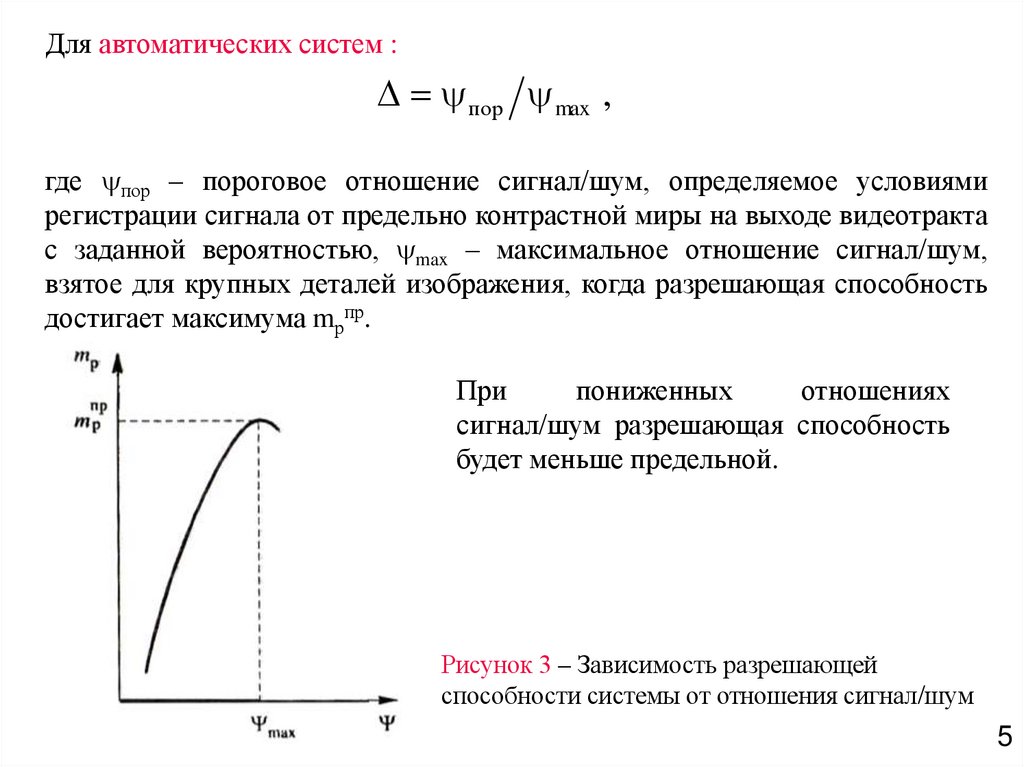
Для автоматических систем :пор max ,
где пор – пороговое отношение сигнал/шум, определяемое условиями
регистрации сигнала от предельно контрастной миры на выходе видеотракта
с заданной вероятностью, max – максимальное отношение сигнал/шум,
взятое для крупных деталей изображения, когда разрешающая способность
достигает максимума mрпр.
При
пониженных
отношениях
сигнал/шум разрешающая способность
будет меньше предельной.
Рисунок 3 – Зависимость разрешающей
способности системы от отношения сигнал/шум
5
6.
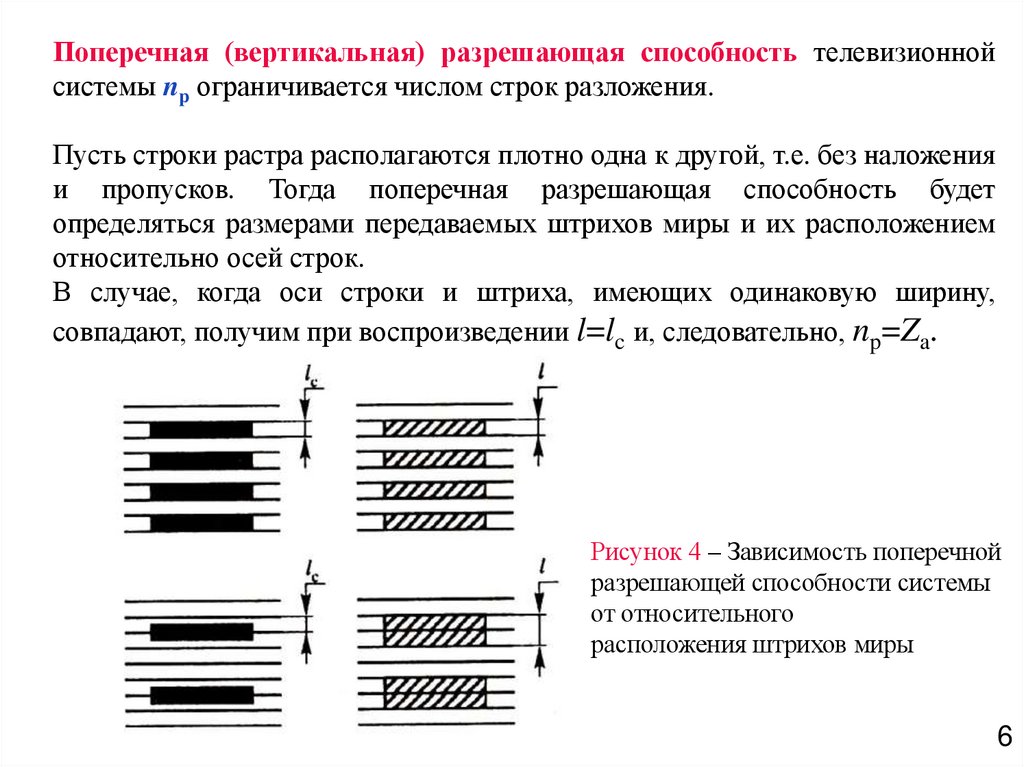
Поперечная (вертикальная) разрешающая способность телевизионнойсистемы np ограничивается числом строк разложения.
Пусть строки растра располагаются плотно одна к другой, т.е. без наложения
и пропусков. Тогда поперечная разрешающая способность будет
определяться размерами передаваемых штрихов миры и их расположением
относительно осей строк.
В случае, когда оси строки и штриха, имеющих одинаковую ширину,
совпадают, получим при воспроизведении l=lc и, следовательно, np=Za.
Рисунок 4 – Зависимость поперечной
разрешающей способности системы
от относительного
расположения штрихов миры
6
7.
При смещении осей на половину строки воспроизводимое изображение штрихабудет вдвое больше вертикального размера передаваемого изображения, т.е. l=2lc,
что отвечает случаю np=0,5Za.
При расчетах обычно принято оценивать разрешающую способность системы в
поперечном направлении как некоторую среднюю величину, np=0,75Za.
Поперечная разрешающая способность может быть определена с учетом двух
факторов:
• угловой разрешающей способности глаза (остроты зрения) пор,
ограничивающей видимость строчной структуры растра.
• условия обнаружения отдельных деталей изображения объекта.
Рассмотрим оба фактора последовательно.
1. Угол, под которым будет наблюдаться горизонтальный штрих на экране,
удаленного от оператора на расстояние H:
- в радианах
h
tg
;
np H
- в угловых минутах
180 60 h 3438h
.
np H
np H
7
8.
Если принять H/h=5 и приравнять φ=αпор=1', то получим np = 688 твл,Za=nр/0,75=920 стр.
Для существующего стандарта на вещательное телевидение Za=575 стр.,
чему соответствует np = 430 твл и H/h=8.
2. Необходимое значение np, удовлетворяющее условию обнаружения или
опознавания отдельных характерных деталей изображения, можно
определить, если известен характер самого объекта. При этом необходимо
знать экспериментально устанавливаемое число различимых элементов Рэ,
приходящихся на вертикальный линейный размер обнаруживаемой
(опознаваемой) детали.
Если известна величина Рэ, а также вертикальный размер изображения
детали h0, то
Рэ h
np
.
h0
Таким образом, чем крупнее деталь, т.е. чем больше размер h0, тем
требуется меньшая разрешающая способность системы для ее
обнаружения или опознавания, а, следовательно, и меньшее число строк
8
разложения.
9. 1.6 Количество градаций яркости воспроизводимого изображения
В телевизионной системе распознаваемость объекта на экране основываетсяна различении перепадов яркости, называемых градациями яркости или
полутонами.
Визуальная система
Автоматическая система
пороговая градация
яркости Lпор, при которой
возможно обнаружение или
опознавание объекта,
зависит от контрастной
чувствительности зрения в
заданных условиях
наблюдения.
приращение (градация) сигнала Uc,
которое
может
быть
с
требуемой
вероятностью зафиксировано пороговым
устройством АЦП.
Связь величины Uc с пороговым
отношением сигнала к шуму:
пор
U c
U
2
ш
,
где U ш – напряжение шумов на входе
порогового устройства.
9
10.
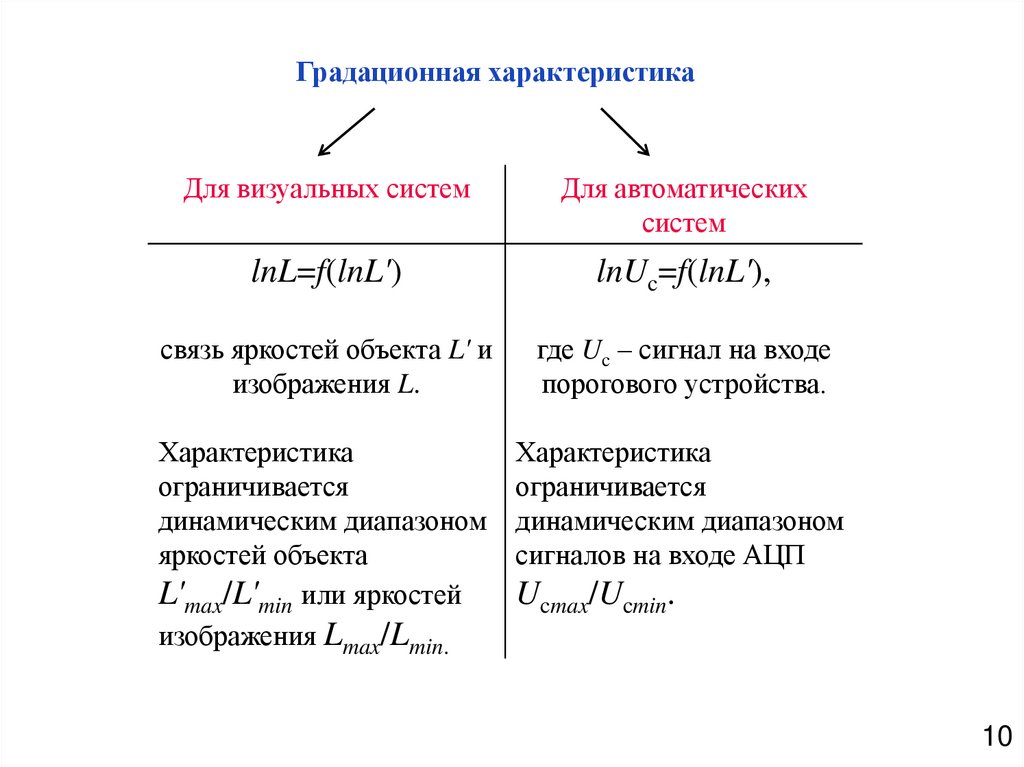
Градационная характеристикаДля визуальных систем
Для автоматических
систем
lnL=f(lnL')
lnUc=f(lnL'),
связь яркостей объекта L' и
изображения L.
где Uc – сигнал на входе
порогового устройства.
Характеристика
ограничивается
динамическим диапазоном
яркостей объекта
L'max/L'min или яркостей
изображения Lmax/Lmin.
Характеристика
ограничивается
динамическим диапазоном
сигналов на входе АЦП
Ucmax/Ucmin.
10
11.
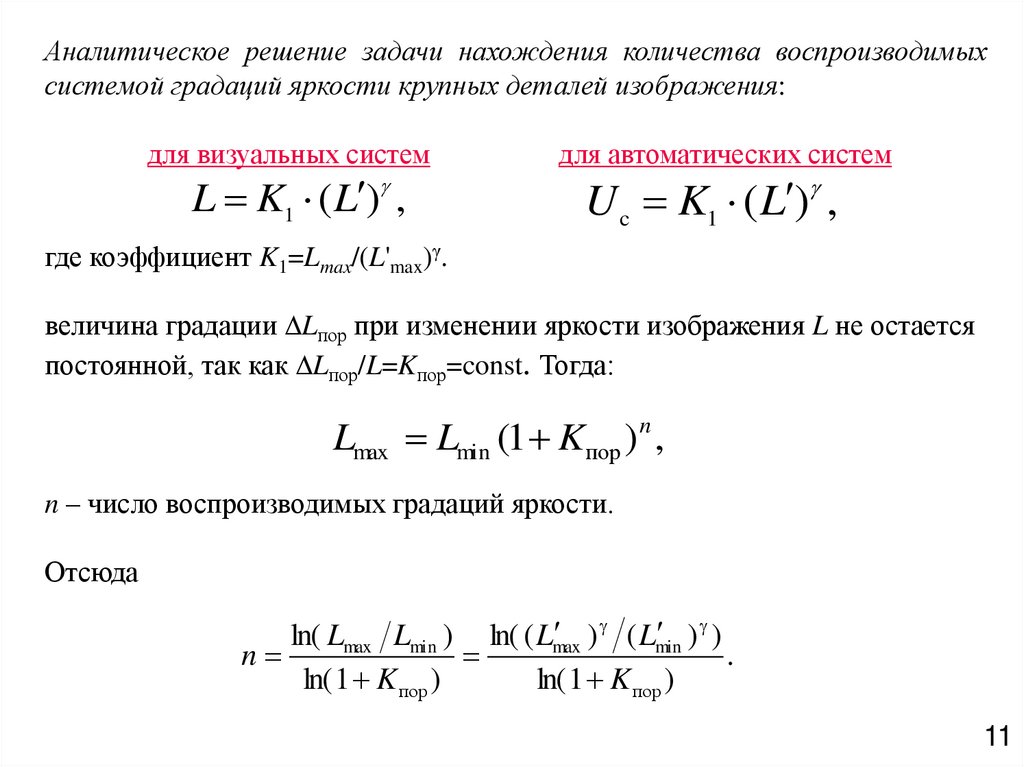
Аналитическое решение задачи нахождения количества воспроизводимыхсистемой градаций яркости крупных деталей изображения:
для визуальных систем
L K1 ( L ) ,
для автоматических систем
U c K1 ( L ) ,
где коэффициент K1=Lmax/(L'max)γ.
величина градации Lпор при изменении яркости изображения L не остается
постоянной, так как Lпор/L=Kпор=const. Тогда:
Lmax Lmin (1 Kпор ) n ,
n – число воспроизводимых градаций яркости.
Отсюда
) ( Lmin
) )
ln( Lmax Lmin ) ln( ( Lmax
n
.
ln( 1 K пор )
ln( 1 K пор )
11
12.
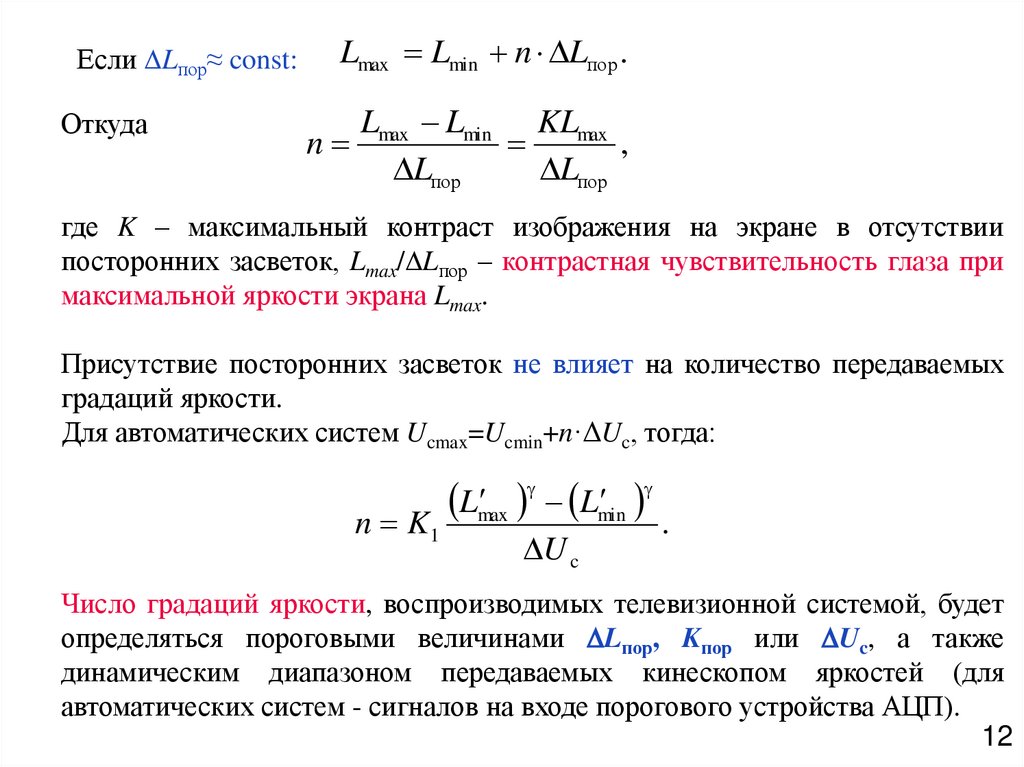
Если Lпор≈ const:Откуда
Lmax Lmin n Lпор .
Lmax Lmin KLmax
n
,
Lпор
Lпор
где K – максимальный контраст изображения на экране в отсутствии
посторонних засветок, Lmax/ Lпор – контрастная чувствительность глаза при
максимальной яркости экрана Lmax.
Присутствие посторонних засветок не влияет на количество передаваемых
градаций яркости.
Для автоматических систем Ucmax=Ucmin+n·ΔUc, тогда:
Lmin
Lmax
n K
.
1
U c
Число градаций яркости, воспроизводимых телевизионной системой, будет
определяться пороговыми величинами Lпор, Kпор или Uc, а также
динамическим диапазоном передаваемых кинескопом яркостей (для
автоматических систем - сигналов на входе порогового устройства АЦП).
12
13.
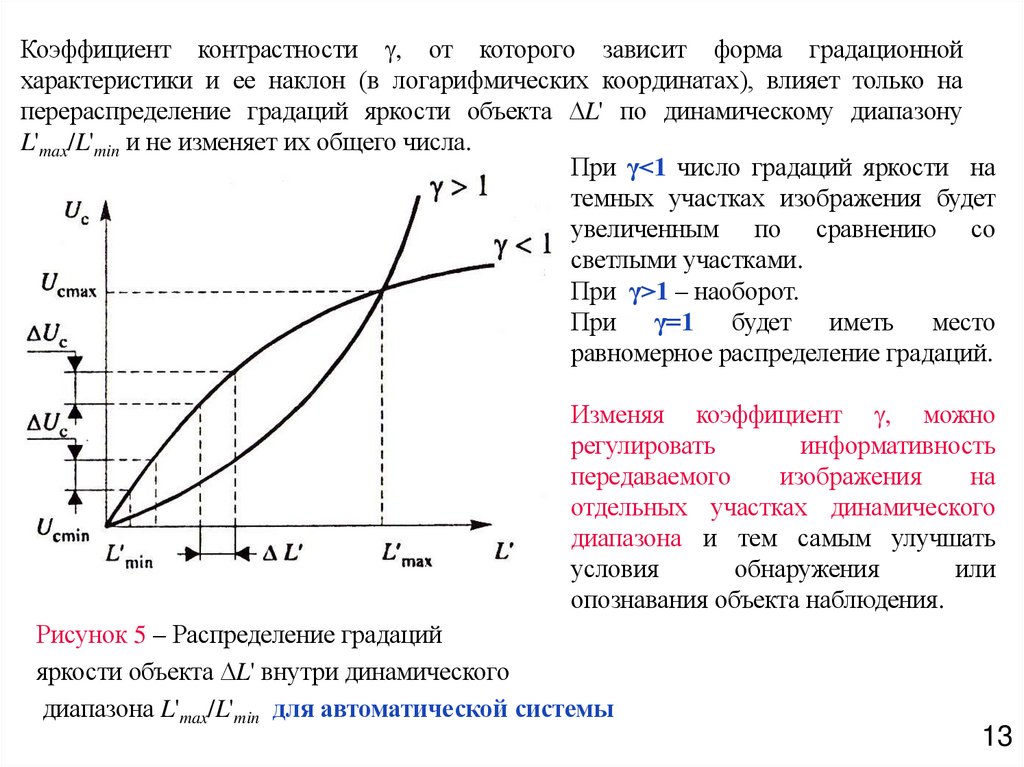
Коэффициент контрастности , от которого зависит форма градационнойхарактеристики и ее наклон (в логарифмических координатах), влияет только на
перераспределение градаций яркости объекта L' по динамическому диапазону
L'max/L'min и не изменяет их общего числа.
При γ<1 число градаций яркости на
темных участках изображения будет
увеличенным по сравнению со
светлыми участками.
При γ>1 – наоборот.
При γ=1 будет иметь место
равномерное распределение градаций.
Изменяя коэффициент , можно
регулировать
информативность
передаваемого
изображения
на
отдельных участках динамического
диапазона и тем самым улучшать
условия
обнаружения
или
опознавания объекта наблюдения.
Рисунок 5 – Распределение градаций
яркости объекта L' внутри динамического
диапазона L'max/L'min для автоматической системы
13
14.
1.7 Выбор частоты смены кадров и яркости телевизионногоизображения
Частота смены кадров определяет частоту съема информации системой и
является параметром, от которого зависит временное разрешение системы и
требуемая полоса частот канала связи.
Критерий выбора – допустимый уровень мерцаний изображения (для
визуальных систем).
Частота мерцаний Fм должна быть не ниже критической величины fкр,
при которой изображение воспринимается как полностью слитное.
Критическая частота fкр зависит от яркости изображения.
Частота мерцания Fм зависит от материала люминофора, который нанесен
на экран (разное время затухания).
Определяющим фактором при выборе люминофора будет являться
остаточная яркость, с которой начинается новый, цикл его возбуждения.
Однако при выборе частоты смены кадров приходится учитывать искажения,
возникающие при передаче изображений движущихся в продольном
направлении объектов.
14
15.
Выбор яркости фона телевизионного изображения должен удовлетворятьследующим требованиям:
1. Яркость должна быть достаточной для обеспечения удовлетворительной
остроты зрения.
2. Яркость должна быть достаточной с точки зрения длительности
сохранения глазом заданной остроты зрения. Устойчивость ясного видения
растет с увеличением яркости и достигает максимума при яркости около
64 кд/м2, оставаясь затем примерно постоянной.
3. Выбранная яркость должна удовлетворять требованию достижения
максимально возможной контрастной чувствительности глаза. С этой
точки зрения яркость фона должна лежать в пределах от 30 до 300 кд/м2.
4. При наличии посторонних засветок экрана кинескопа яркость должна
выбираться достаточной с точки зрения допустимого снижения контраста
изображения.
Рекомендуемые значения яркости фона телевизионного изображения
должны составлять 40 - 90 кд/м2.
15
16. 1.8 Энергетическая и контрастная чувствительности телевизионной системы
Энергетическая чувствительность – величина, обратная минимальнойвходной энергии Wвх.min
входного изображения, при которых система
обеспечивает выполнение своих функций.
Контрастная чувствительность – величина, обратная минимальному
контрасту входного изображения Kвх.min, при которых система обеспечивает
выполнение своих функций.
Функции систем наблюдения:
заданной вероятностью.
обнаружение и опознавание объекта с
Функции систем измерения:
измерение того или иного параметра
объекта с требуемой точностью.
16
17.
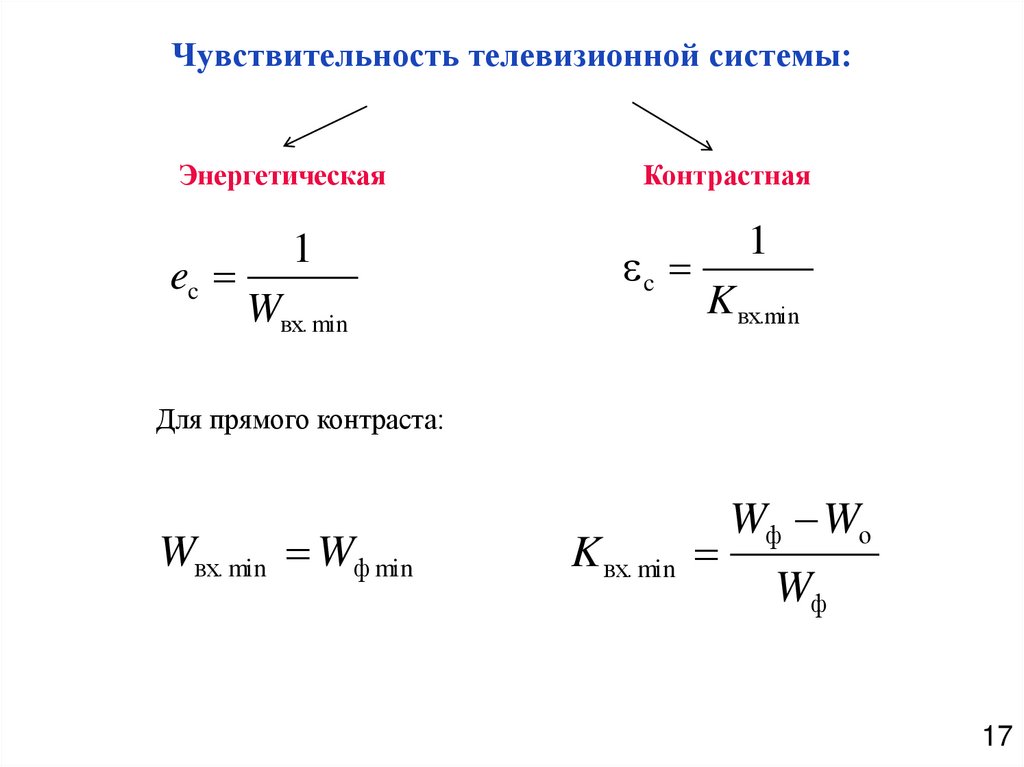
Чувствительность телевизионной системы:Энергетическая
ec
1
Wвх. min
Контрастная
c
1
K вх.min
Для прямого контраста:
Wвх. min Wф min
K вх. min
Wф Wо
Wф
17
18.
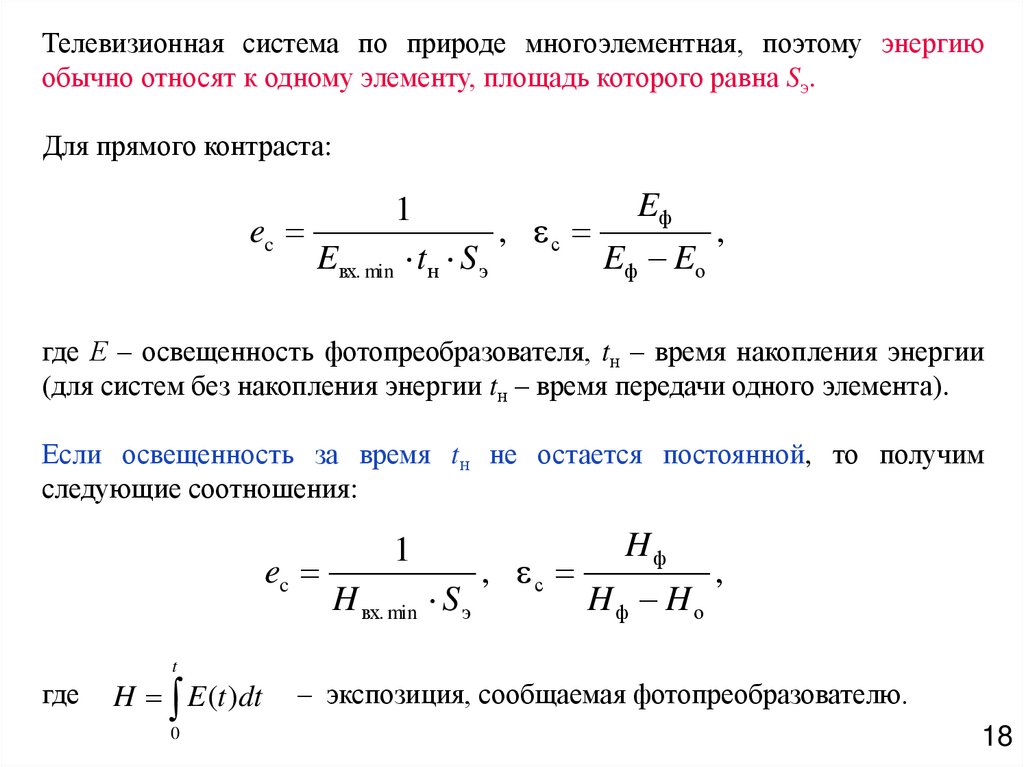
Телевизионная система по природе многоэлементная, поэтому энергиюобычно относят к одному элементу, площадь которого равна Sэ.
Для прямого контраста:
Eф
1
ec
, с
,
Eвх. min tн S э
Eф Eо
где Е – освещенность фотопреобразователя, tн – время накопления энергии
(для систем без накопления энергии tн – время передачи одного элемента).
Если освещенность за время tн не остается постоянной, то получим
следующие соотношения:
ec
1
H вх. min S э
, с
Hф
Hф Hо
,
t
где
H E (t )dt
0
– экспозиция, сообщаемая фотопреобразователю.
18
19.
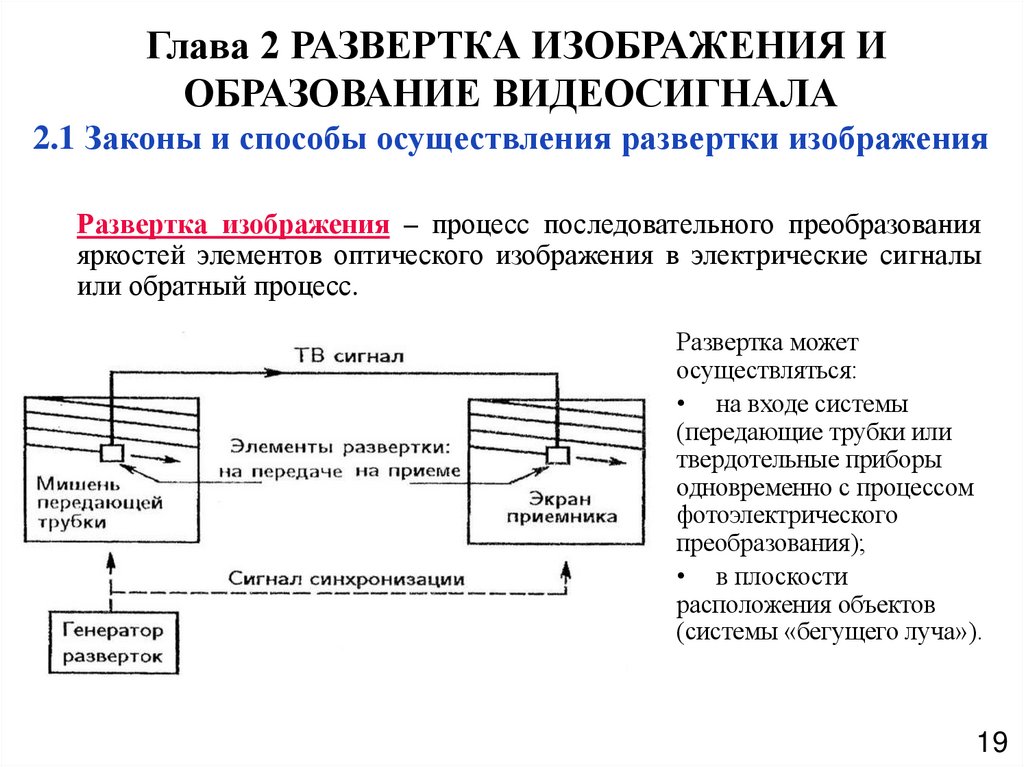
Глава 2 РАЗВЕРТКА ИЗОБРАЖЕНИЯ ИОБРАЗОВАНИЕ ВИДЕОСИГНАЛА
2.1 Законы и способы осуществления развертки изображения
Развертка изображения – процесс последовательного преобразования
яркостей элементов оптического изображения в электрические сигналы
или обратный процесс.
Развертка может
осуществляться:
• на входе системы
(передающие трубки или
твердотельные приборы
одновременно с процессом
фотоэлектрического
преобразования);
• в плоскости
расположения объектов
(системы «бегущего луча»).
19
20.
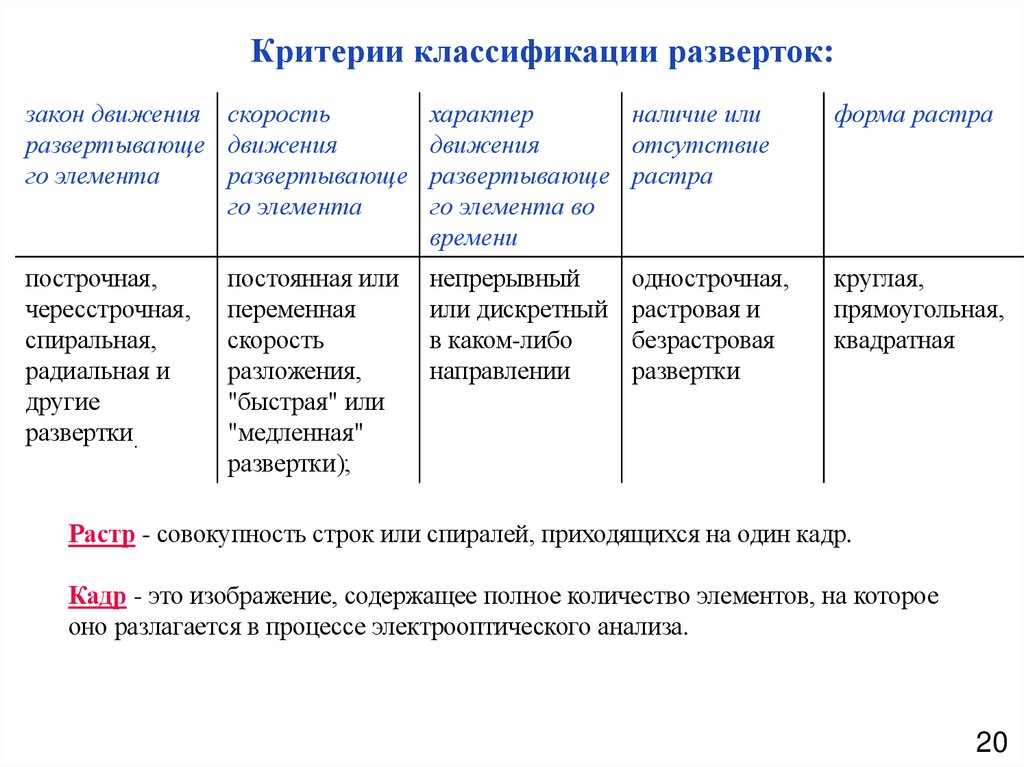
Критерии классификации разверток:закон движения скорость
развертывающе движения
го элемента
развертывающе
го элемента
характер
наличие или
движения
отсутствие
развертывающе растра
го элемента во
времени
форма растра
построчная,
чересстрочная,
спиральная,
радиальная и
другие
развертки.
непрерывный
или дискретный
в каком-либо
направлении
круглая,
прямоугольная,
квадратная
постоянная или
переменная
скорость
разложения,
"быстрая" или
"медленная"
развертки);
однострочная,
растровая и
безрастровая
развертки
Растр - совокупность строк или спиралей, приходящихся на один кадр.
Кадр - это изображение, содержащее полное количество элементов, на которое
оно разлагается в процессе электрооптического анализа.
20
21.
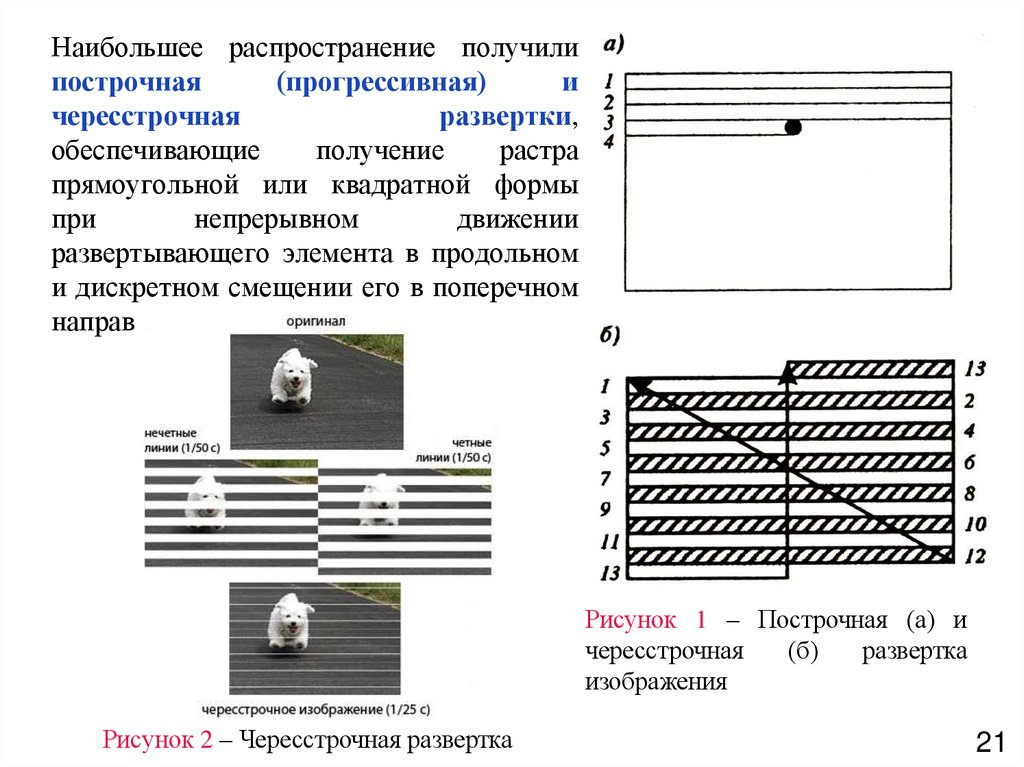
Наибольшее распространение получилипострочная
(прогрессивная)
и
чересстрочная
развертки,
обеспечивающие
получение
растра
прямоугольной или квадратной формы
при
непрерывном
движении
развертывающего элемента в продольном
и дискретном смещении его в поперечном
направлении.
Рисунок 1 – Построчная (а) и
чересстрочная
(б)
развертка
изображения
Рисунок 2 – Чересстрочная развертка
21
22.
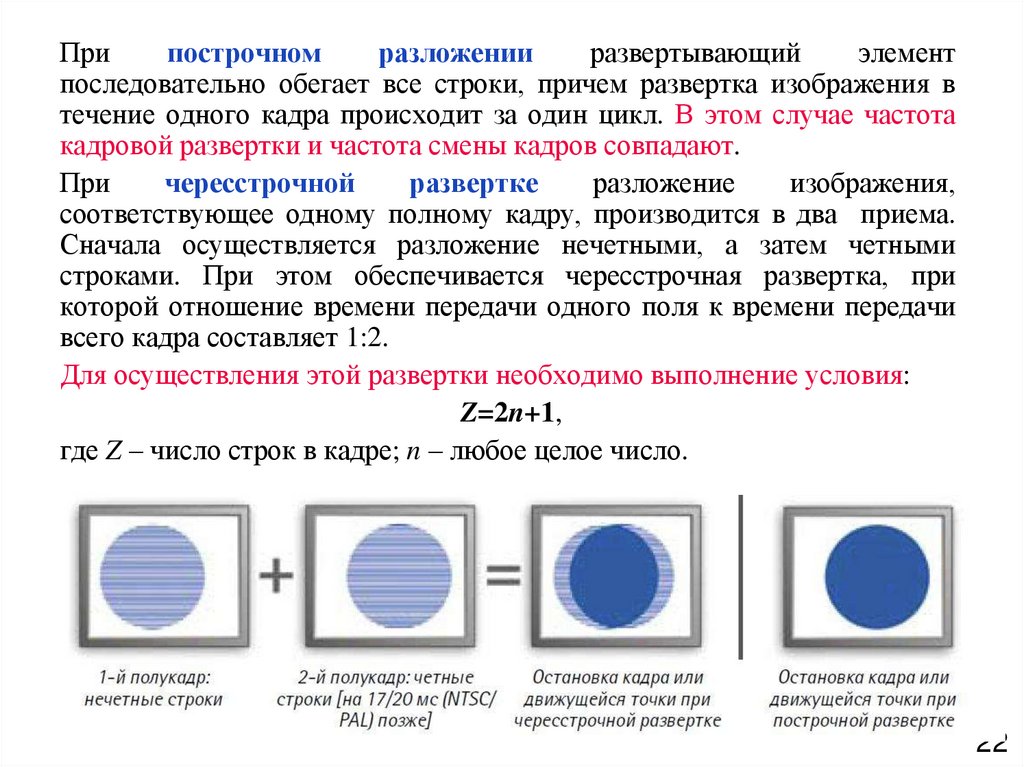
Припострочном
разложении
развертывающий
элемент
последовательно обегает все строки, причем развертка изображения в
течение одного кадра происходит за один цикл. В этом случае частота
кадровой развертки и частота смены кадров совпадают.
При
чересстрочной
развертке
разложение
изображения,
соответствующее одному полному кадру, производится в два приема.
Сначала осуществляется разложение нечетными, а затем четными
строками. При этом обеспечивается чересстрочная развертка, при
которой отношение времени передачи одного поля к времени передачи
всего кадра составляет 1:2.
Для осуществления этой развертки необходимо выполнение условия:
Z=2n+1,
где Z – число строк в кадре; n – любое целое число.
22
23.
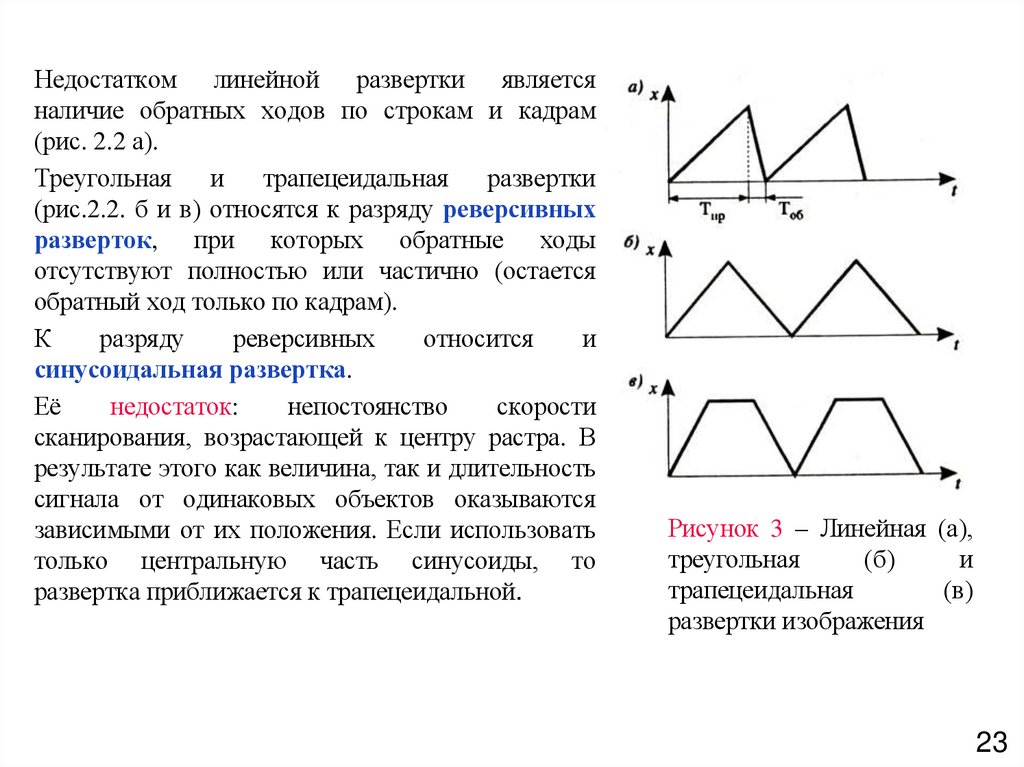
Недостатком линейной развертки являетсяналичие обратных ходов по строкам и кадрам
(рис. 2.2 а).
Треугольная
и
трапецеидальная
развертки
(рис.2.2. б и в) относятся к разряду реверсивных
разверток, при которых обратные ходы
отсутствуют полностью или частично (остается
обратный ход только по кадрам).
К
разряду
реверсивных
относится
и
синусоидальная развертка.
Её
недостаток:
непостоянство
скорости
сканирования, возрастающей к центру растра. В
результате этого как величина, так и длительность
сигнала от одинаковых объектов оказываются
зависимыми от их положения. Если использовать
только центральную часть синусоиды, то
развертка приближается к трапецеидальной.
Рисунок 3 – Линейная (а),
треугольная
(б)
и
трапецеидальная
(в)
развертки изображения
23
24.
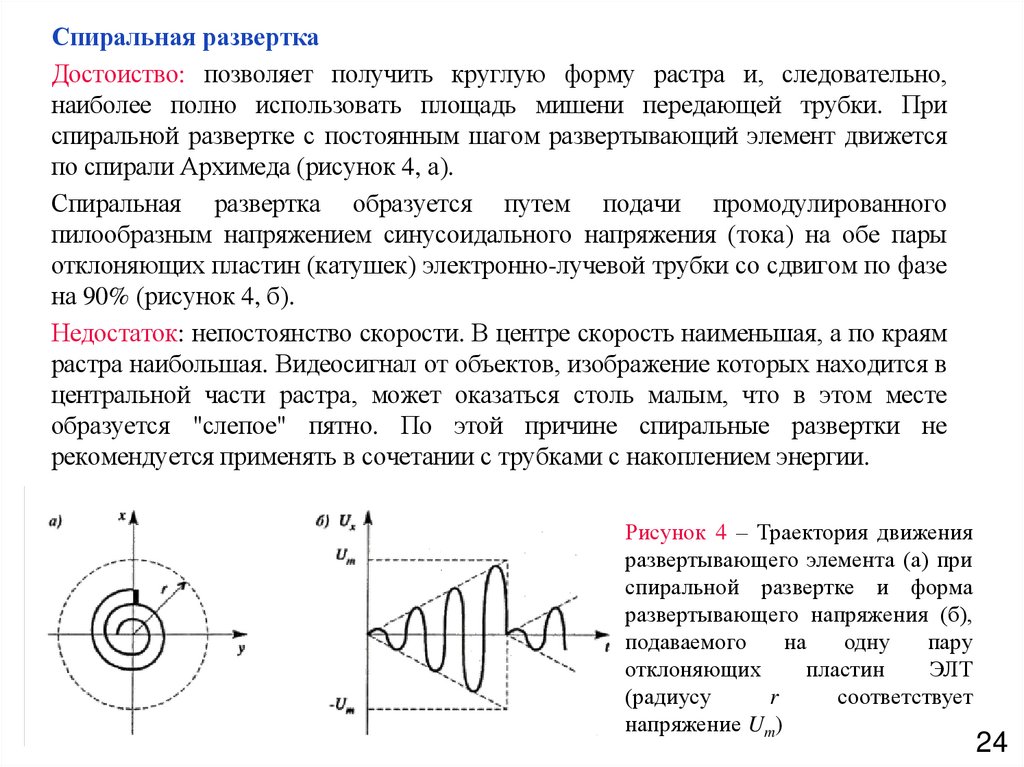
Спиральная разверткаДостоиство: позволяет получить круглую форму растра и, следовательно,
наиболее полно использовать площадь мишени передающей трубки. При
спиральной развертке с постоянным шагом развертывающий элемент движется
по спирали Архимеда (рисунок 4, а).
Спиральная развертка образуется путем подачи промодулированного
пилообразным напряжением синусоидального напряжения (тока) на обе пары
отклоняющих пластин (катушек) электронно-лучевой трубки со сдвигом по фазе
на 90% (рисунок 4, б).
Недостаток: непостоянство скорости. В центре скорость наименьшая, а по краям
растра наибольшая. Видеосигнал от объектов, изображение которых находится в
центральной части растра, может оказаться столь малым, что в этом месте
образуется "слепое" пятно. По этой причине спиральные развертки не
рекомендуется применять в сочетании с трубками с накоплением энергии.
Рисунок 4 – Траектория движения
развертывающего элемента (а) при
спиральной развертке и форма
развертывающего напряжения (б),
подаваемого
на
одну
пару
отклоняющих
пластин
ЭЛТ
(радиусу
r
соответствует
напряжение Um)
24
25.
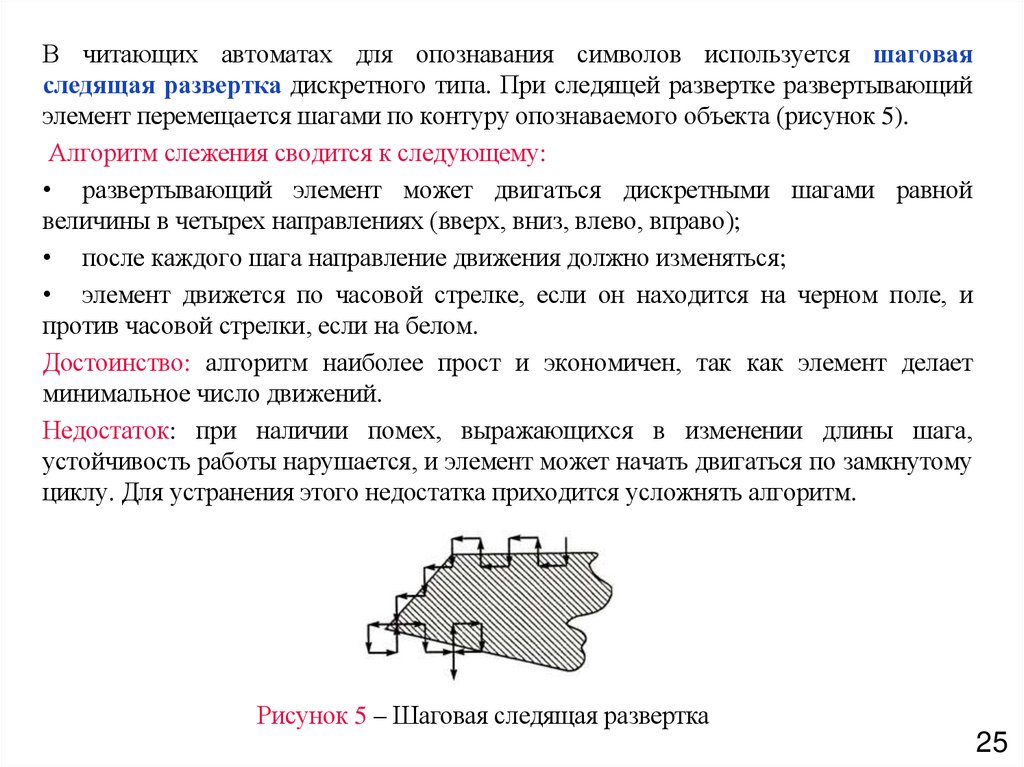
В читающих автоматах для опознавания символов используется шаговаяследящая развертка дискретного типа. При следящей развертке развертывающий
элемент перемещается шагами по контуру опознаваемого объекта (рисунок 5).
Алгоритм слежения сводится к следующему:
• развертывающий элемент может двигаться дискретными шагами равной
величины в четырех направлениях (вверх, вниз, влево, вправо);
• после каждого шага направление движения должно изменяться;
• элемент движется по часовой стрелке, если он находится на черном поле, и
против часовой стрелки, если на белом.
Достоинство: алгоритм наиболее прост и экономичен, так как элемент делает
минимальное число движений.
Недостаток: при наличии помех, выражающихся в изменении длины шага,
устойчивость работы нарушается, и элемент может начать двигаться по замкнутому
циклу. Для устранения этого недостатка приходится усложнять алгоритм.
Рисунок 5 – Шаговая следящая развертка
25
26.
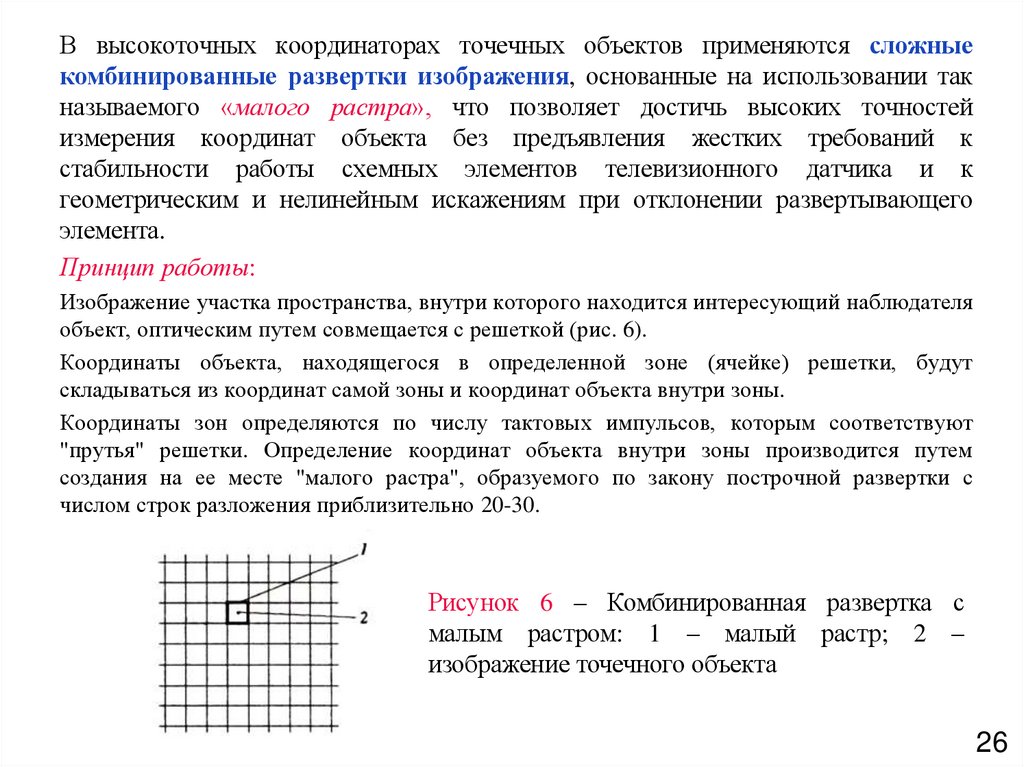
В высокоточных координаторах точечных объектов применяются сложныекомбинированные развертки изображения, основанные на использовании так
называемого «малого растра», что позволяет достичь высоких точностей
измерения координат объекта без предъявления жестких требований к
стабильности работы схемных элементов телевизионного датчика и к
геометрическим и нелинейным искажениям при отклонении развертывающего
элемента.
Принцип работы:
Изображение участка пространства, внутри которого находится интересующий наблюдателя
объект, оптическим путем совмещается с решеткой (рис. 6).
Координаты объекта, находящегося в определенной зоне (ячейке) решетки, будут
складываться из координат самой зоны и координат объекта внутри зоны.
Координаты зон определяются по числу тактовых импульсов, которым соответствуют
"прутья" решетки. Определение координат объекта внутри зоны производится путем
создания на ее месте "малого растра", образуемого по закону построчной развертки с
числом строк разложения приблизительно 20-30.
Рисунок 6 – Комбинированная развертка с
малым растром: 1 – малый растр; 2 –
изображение точечного объекта
26
27.
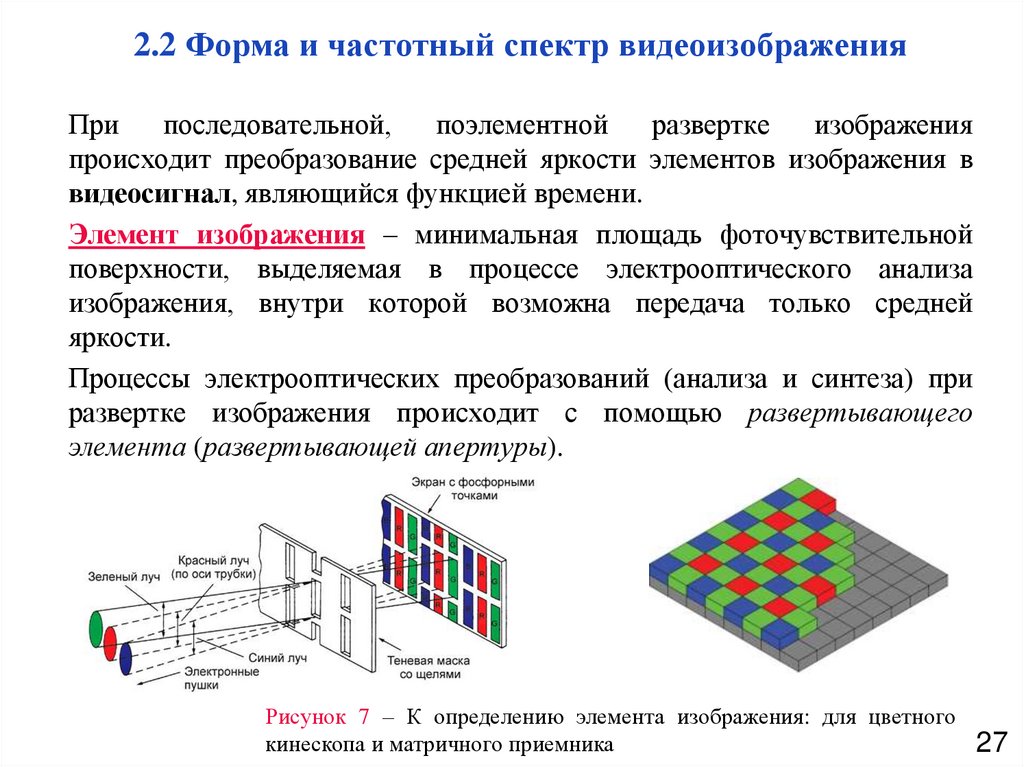
2.2 Форма и частотный спектр видеоизображенияПри
последовательной,
поэлементной
развертке
изображения
происходит преобразование средней яркости элементов изображения в
видеосигнал, являющийся функцией времени.
Элемент изображения – минимальная площадь фоточувствительной
поверхности, выделяемая в процессе электрооптического анализа
изображения, внутри которой возможна передача только средней
яркости.
Процессы электрооптических преобразований (анализа и синтеза) при
развертке изображения происходит с помощью развертывающего
элемента (развертывающей апертуры).
Рисунок 7 – К определению элемента изображения: для цветного
кинескопа и матричного приемника
27
28.
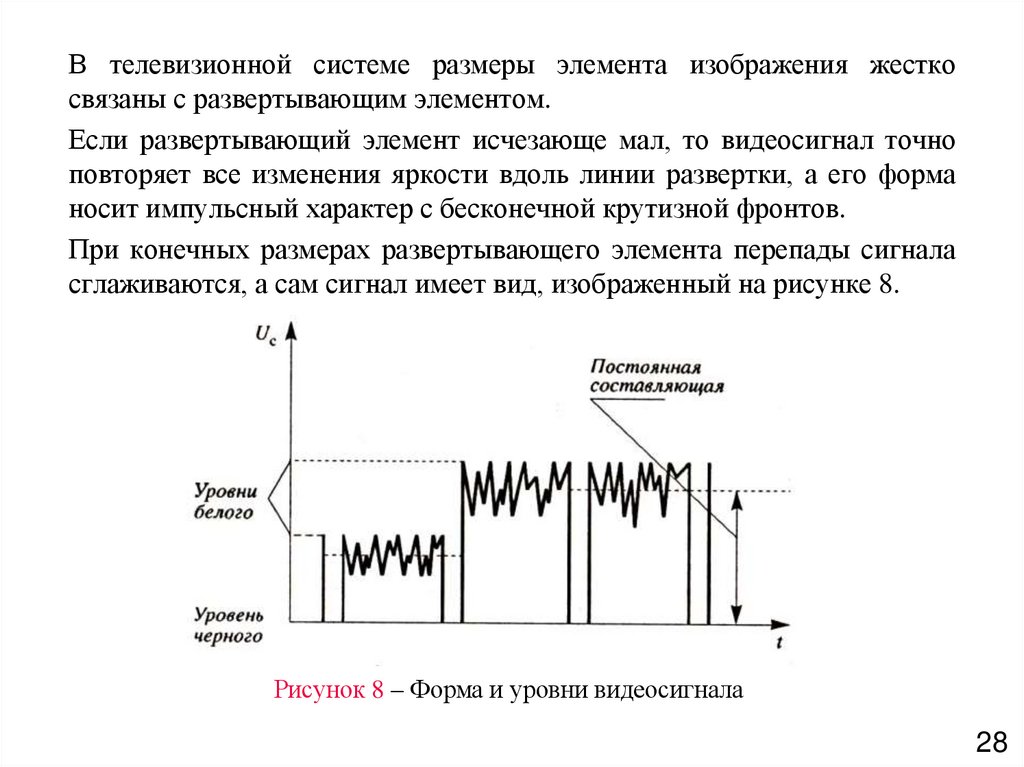
В телевизионной системе размеры элемента изображения жесткосвязаны с развертывающим элементом.
Если развертывающий элемент исчезающе мал, то видеосигнал точно
повторяет все изменения яркости вдоль линии развертки, а его форма
носит импульсный характер с бесконечной крутизной фронтов.
При конечных размерах развертывающего элемента перепады сигнала
сглаживаются, а сам сигнал имеет вид, изображенный на рисунке 8.
Рисунок 8 – Форма и уровни видеосигнала
28
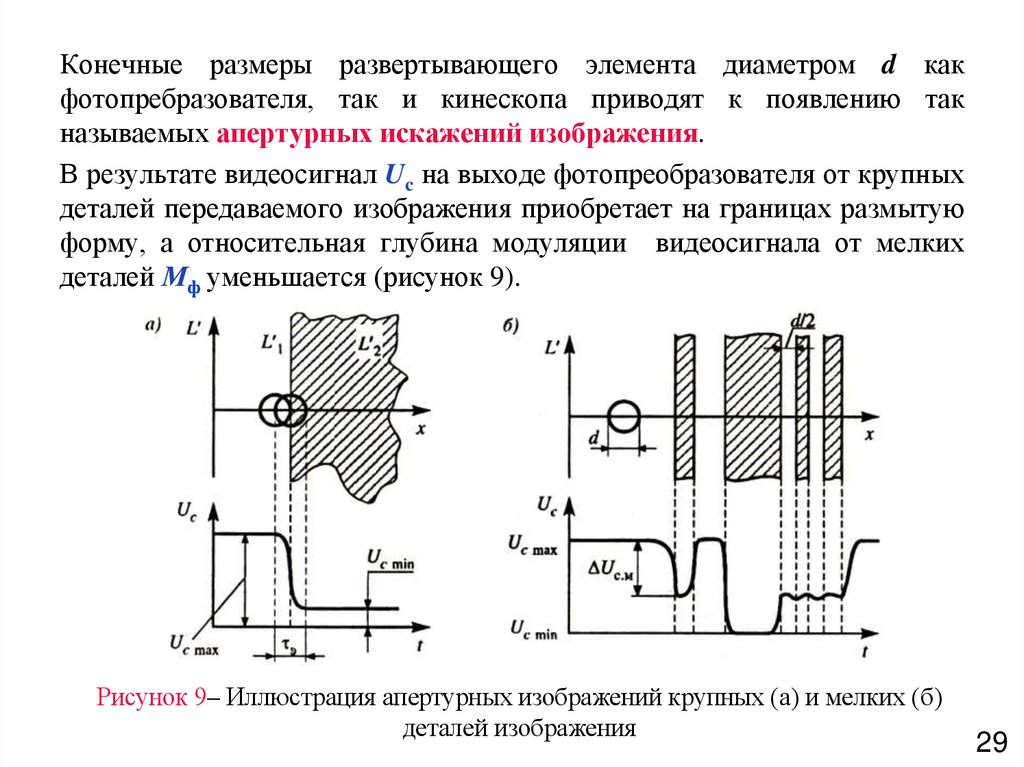
29.
Конечные размеры развертывающего элемента диаметром d какфотопребразователя, так и кинескопа приводят к появлению так
называемых апертурных искажений изображения.
В результате видеосигнал Uc на выходе фотопреобразователя от крупных
деталей передаваемого изображения приобретает на границах размытую
форму, а относительная глубина модуляции видеосигнала от мелких
деталей Мф уменьшается (рисунок 9).
Рисунок 9– Иллюстрация апертурных изображений крупных (а) и мелких (б)
деталей изображения
29
30.
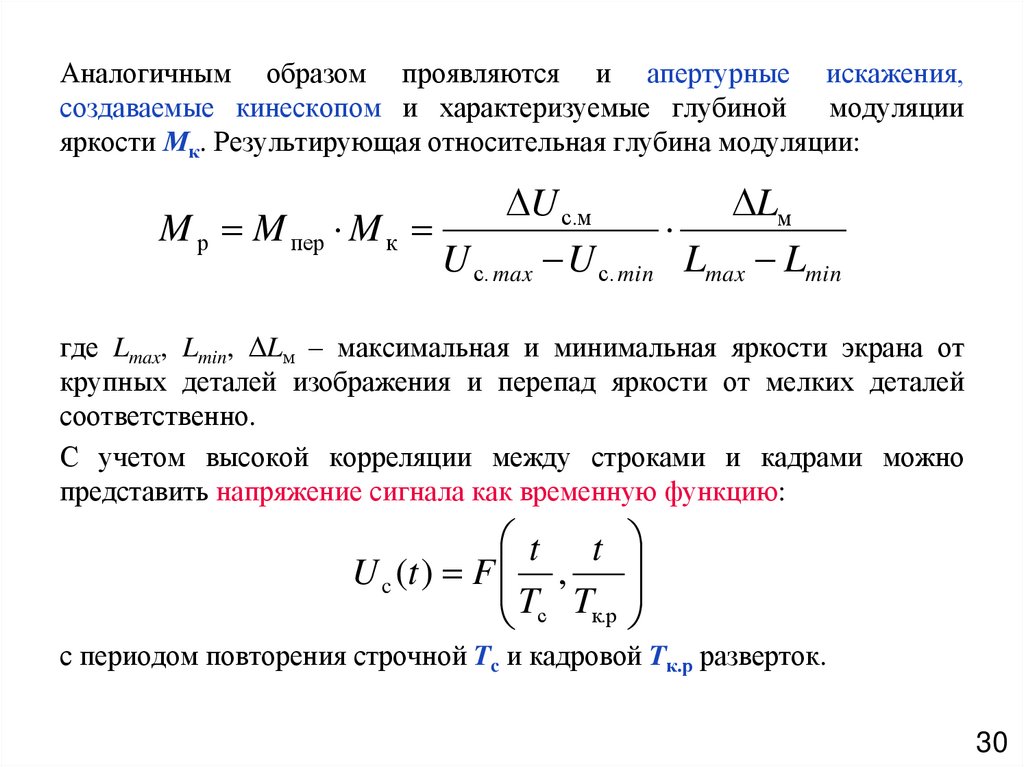
Аналогичным образом проявляются и апертурные искажения,создаваемые кинескопом и характеризуемые глубиной
модуляции
яркости Мк. Результирующая относительная глубина модуляции:
U с.м
Lм
M р M пер M к
U с. max U с. min Lmax Lmin
где Lmax, Lmin, ΔLм – максимальная и минимальная яркости экрана от
крупных деталей изображения и перепад яркости от мелких деталей
соответственно.
С учетом высокой корреляции между строками и кадрами можно
представить напряжение сигнала как временную функцию:
t t
U c (t ) F ,
T T
с к.р
с периодом повторения строчной Tc и кадровой Tк.р разверток.
30
31.
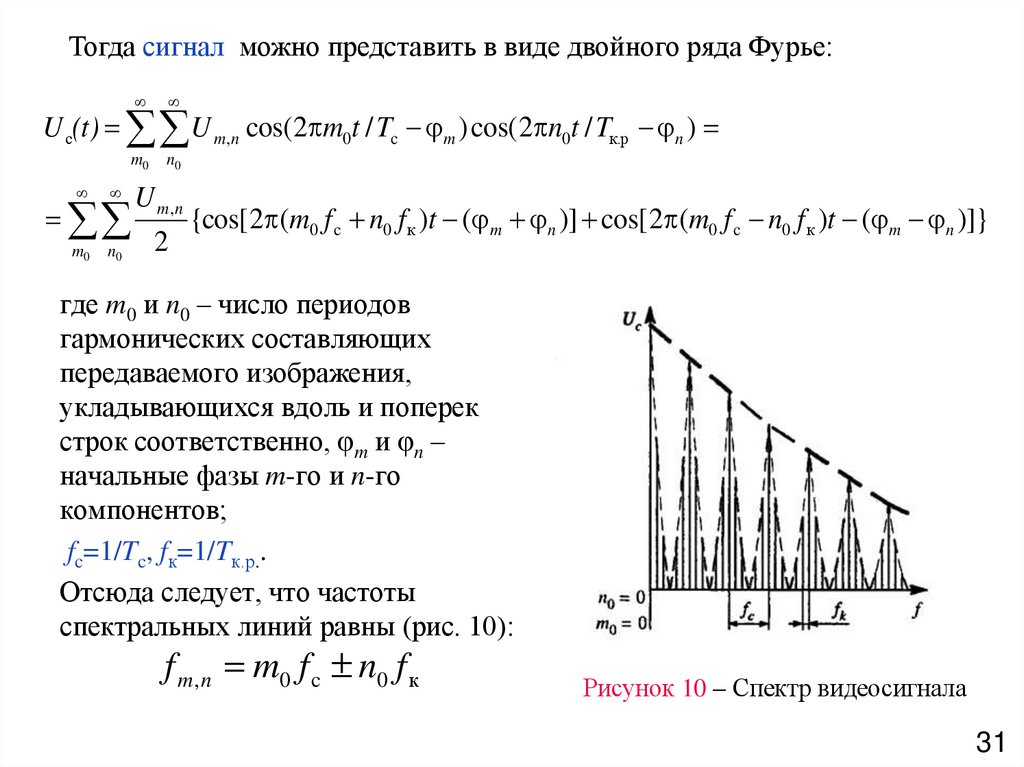
Тогда сигнал можно представить в виде двойного ряда Фурье:m0
n0
U с(t) U m,n cos( 2 m0t / Tc m ) cos( 2 n0t / Tк.р n )
m0
n0
U m,n
2
{cos[ 2 (m0 f c n0 f к )t ( m n )] cos[ 2 (m0 f c n0 f к )t ( m n )]}
где m0 и n0 – число периодов
гармонических составляющих
передаваемого изображения,
укладывающихся вдоль и поперек
строк соответственно, φm и φn –
начальные фазы m-го и n-го
компонентов;
fc=1/Tc, fк=1/Tк.р..
Отсюда следует, что частоты
спектральных линий равны (рис. 10):
f m ,n m0 f c n0 f к
Рисунок 10 – Спектр видеосигнала
31
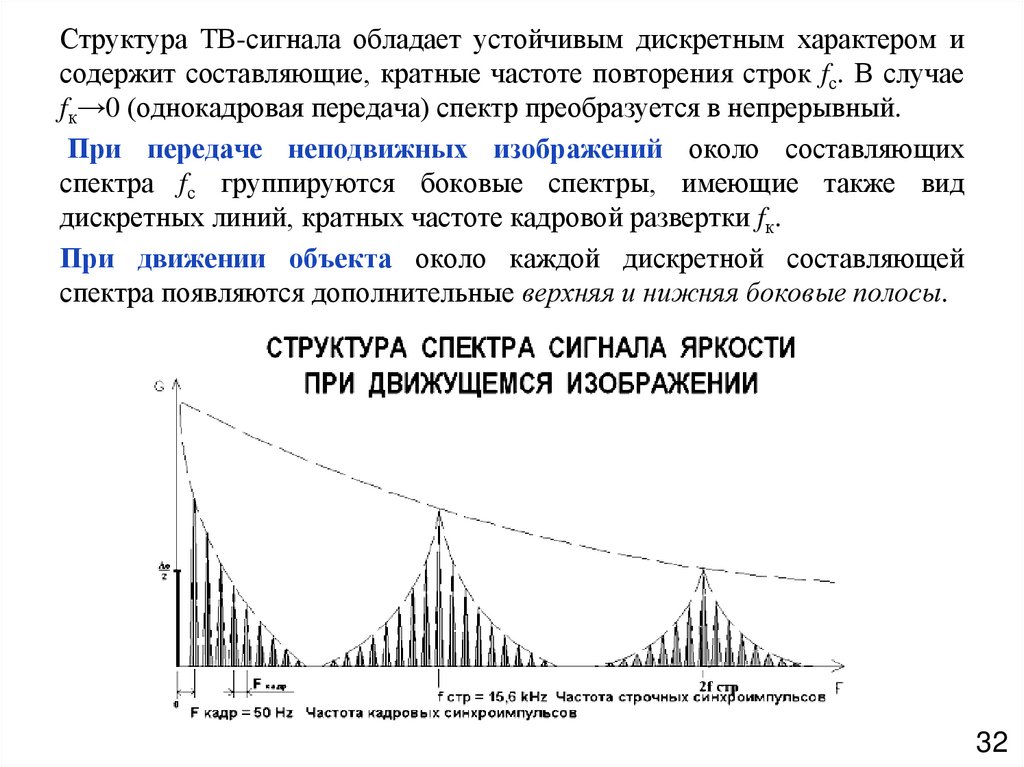
32.
Структура ТВ-сигнала обладает устойчивым дискретным характером исодержит составляющие, кратные частоте повторения строк fс. В случае
fк→0 (однокадровая передача) спектр преобразуется в непрерывный.
При передаче неподвижных изображений около составляющих
спектра fс группируются боковые спектры, имеющие также вид
дискретных линий, кратных частоте кадровой развертки fк.
При движении объекта около каждой дискретной составляющей
спектра появляются дополнительные верхняя и нижняя боковые полосы.
32
33.
Оценим ширину этих полос.Если изображение объекта движется в направлении строчной развертки
со скоростью υ, то период повторения видеосигнала в этом направлении
увеличивается по сравнению с периодом строчной развертки Tc и
составляет величину:
T'c=Tc/(1–υ/υx),
где υx - скорость строчной развертки. Соответственно частота
повторения видеосигнала f'c=fc/(1–υ/υx).
Отклонение частоты повторения сигнала от частоты строчной развертки
равно Δf=fc–f'c=fcυ/υx.
Если положить υ=10–4·υx и fc = 15625 Гц, то Δf ≈ 1,6 Гц. Аналогичный
результат получается и при движении объекта в вертикальном
направлении.
33
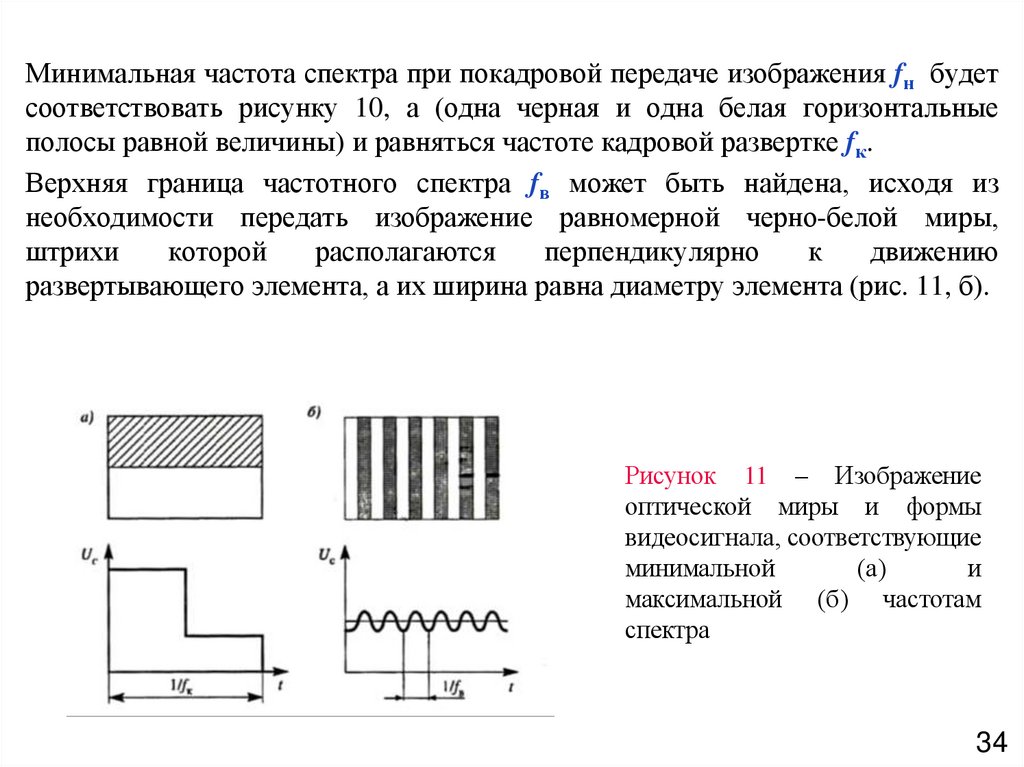
34.
Минимальная частота спектра при покадровой передаче изображения fн будетсоответствовать рисунку 10, а (одна черная и одна белая горизонтальные
полосы равной величины) и равняться частоте кадровой развертке fк.
Верхняя граница частотного спектра fв может быть найдена, исходя из
необходимости передать изображение равномерной черно-белой миры,
штрихи
которой
располагаются
перпендикулярно
к
движению
развертывающего элемента, а их ширина равна диаметру элемента (рис. 11, б).
Рисунок 11 – Изображение
оптической миры и формы
видеосигнала, соответствующие
минимальной
(а)
и
максимальной (б) частотам
спектра
34
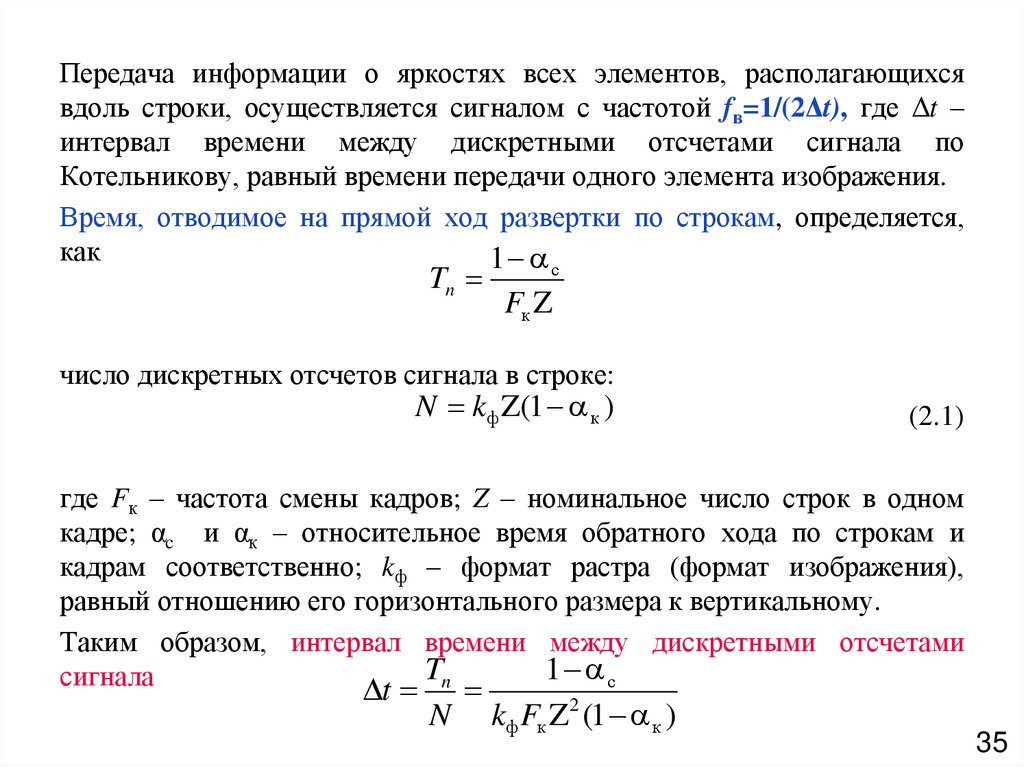
35.
Передача информации о яркостях всех элементов, располагающихсявдоль строки, осуществляется сигналом с частотой fв=1/(2Δt), где Δt –
интервал времени между дискретными отсчетами сигнала по
Котельникову, равный времени передачи одного элемента изображения.
Время, отводимое на прямой ход развертки по строкам, определяется,
как
1
Tn
с
Fк Z
число дискретных отсчетов сигнала в строке:
N kф Z(1 к )
(2.1)
где Fк – частота смены кадров; Z – номинальное число строк в одном
кадре; αc и αк – относительное время обратного хода по строкам и
кадрам соответственно; kф – формат растра (формат изображения),
равный отношению его горизонтального размера к вертикальному.
Таким образом, интервал времени между дискретными отсчетами
Tn
1 с
сигнала
t
N
kф Fк Z2 (1 к )
35
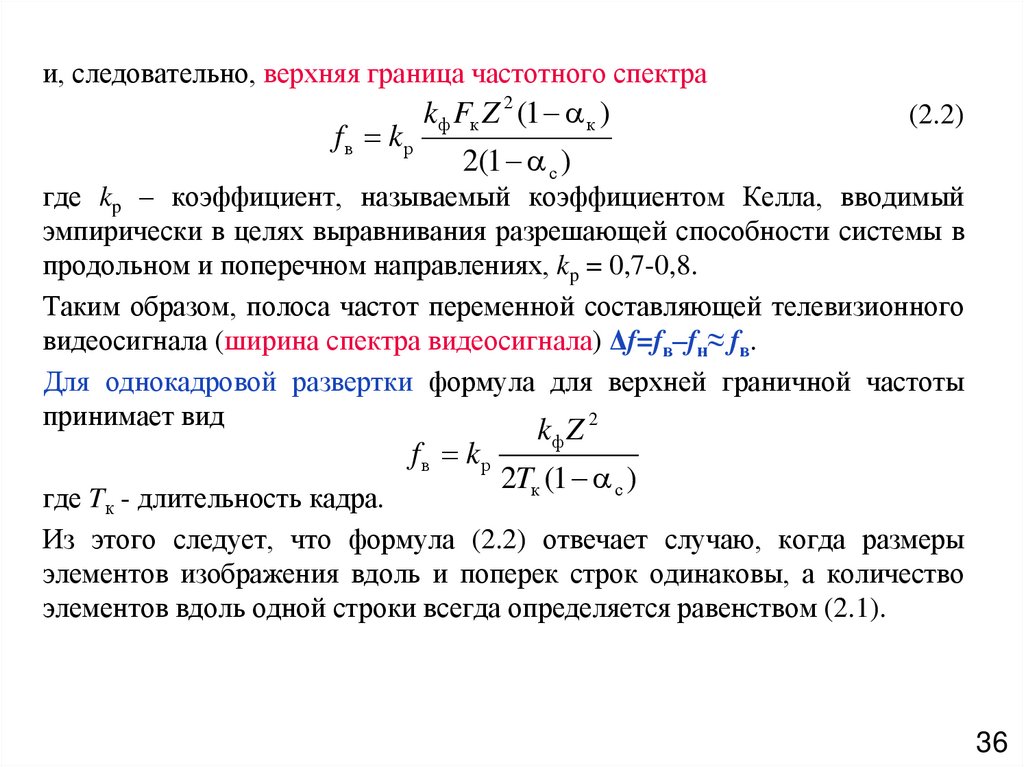
36.
и, следовательно, верхняя граница частотного спектраf в kр
kф Fк Z 2 (1 к )
(2.2)
2(1 с )
где kp – коэффициент, называемый коэффициентом Келла, вводимый
эмпирически в целях выравнивания разрешающей способности системы в
продольном и поперечном направлениях, kp = 0,7-0,8.
Таким образом, полоса частот переменной составляющей телевизионного
видеосигнала (ширина спектра видеосигнала) Δf=fв–fн≈ fв.
Для однокадровой развертки формула для верхней граничной частоты
принимает вид
2
f в kр
kф Z
2Tк (1 с )
где Tк - длительность кадра.
Из этого следует, что формула (2.2) отвечает случаю, когда размеры
элементов изображения вдоль и поперек строк одинаковы, а количество
элементов вдоль одной строки всегда определяется равенством (2.1).
36
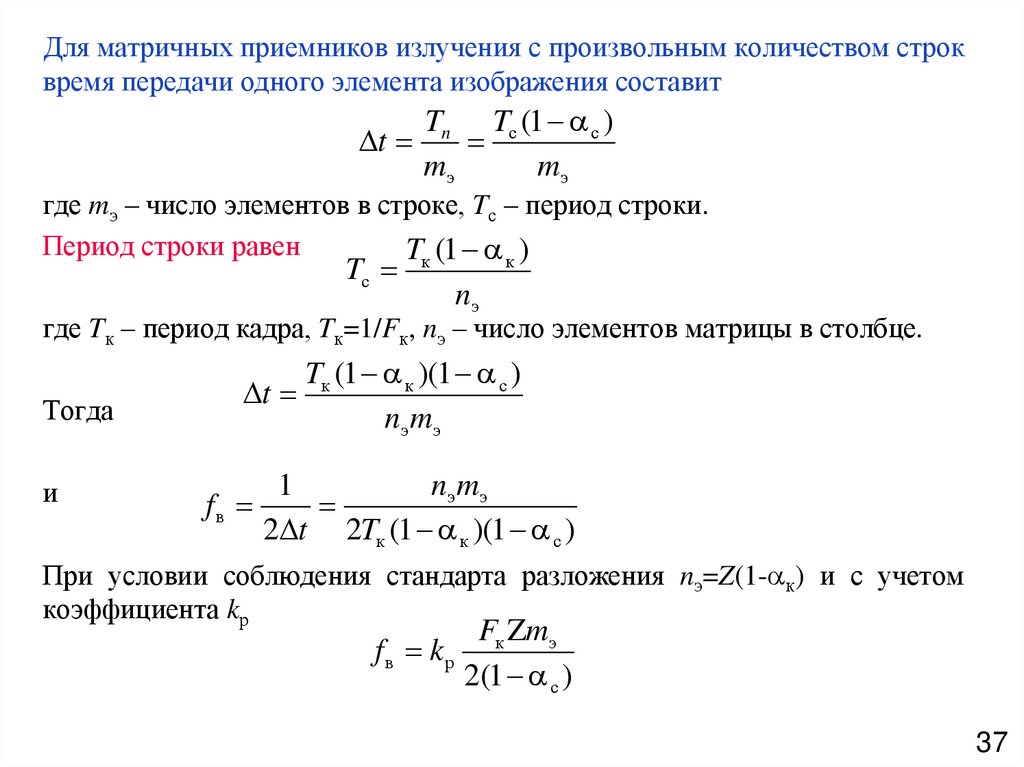
37.
Для матричных приемников излучения с произвольным количеством строквремя передачи одного элемента изображения составит
t
Tn Tс (1 с )
mэ
mэ
где mэ – число элементов в строке, Tс – период строки.
Период строки равен
Tк (1 к )
Tс
nэ
где Tк – период кадра, Tк=1/Fк, nэ – число элементов матрицы в столбце.
Тогда
и
t
Tк (1 к )(1 с )
nэ mэ
nэ mэ
1
fв
2 t 2Tк (1 к )(1 с )
При условии соблюдения стандарта разложения nэ=Z(1- к) и с учетом
коэффициента kр
f в kр
Fк Zmэ
2(1 с )
37
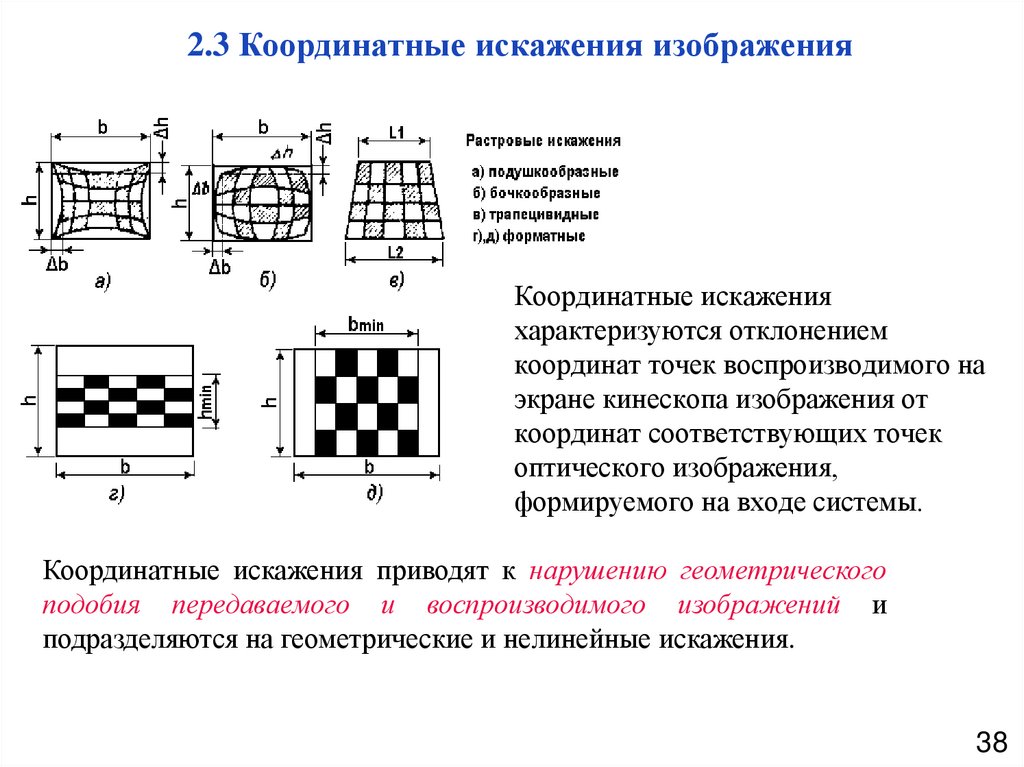
38.
2.3 Координатные искажения изображенияКоординатные искажения
характеризуются отклонением
координат точек воспроизводимого на
экране кинескопа изображения от
координат соответствующих точек
оптического изображения,
формируемого на входе системы.
Координатные искажения приводят к нарушению геометрического
подобия передаваемого и воспроизводимого изображений и
подразделяются на геометрические и нелинейные искажения.
38
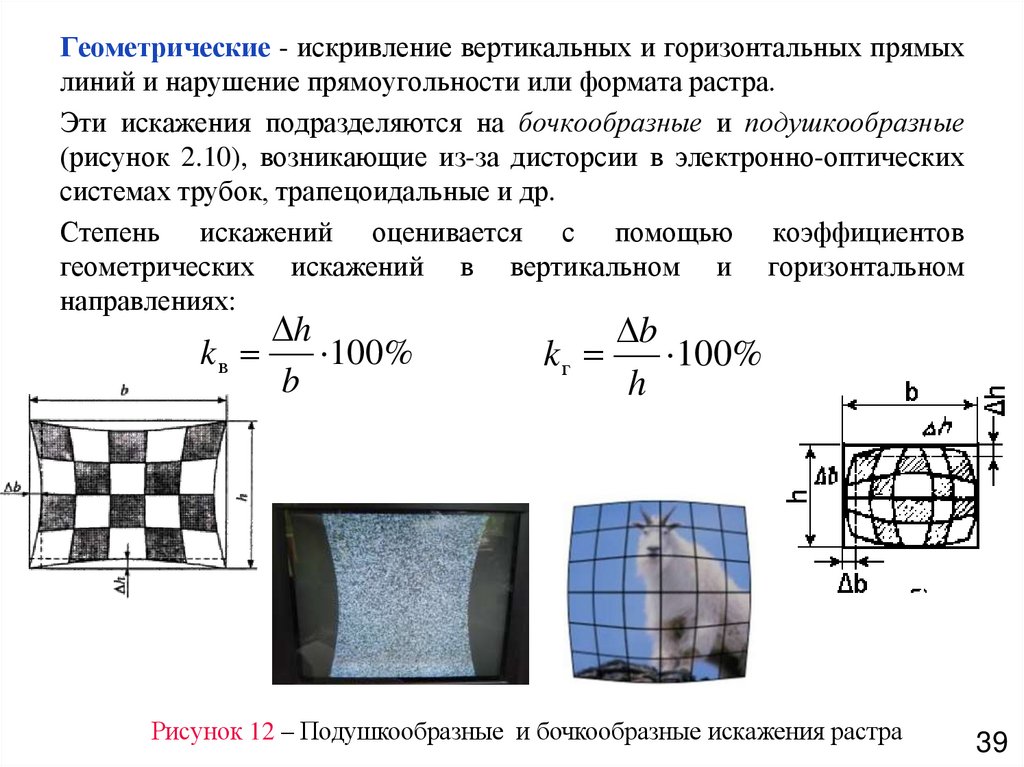
39.
Геометрические - искривление вертикальных и горизонтальных прямыхлиний и нарушение прямоугольности или формата растра.
Эти искажения подразделяются на бочкообразные и подушкообразные
(рисунок 2.10), возникающие из-за дисторсии в электронно-оптических
системах трубок, трапецоидальные и др.
Степень искажений оценивается с помощью коэффициентов
геометрических искажений в вертикальном и горизонтальном
направлениях:
h
kв
100%
b
b
kг
100%
h
Рисунок 12 – Подушкообразные и бочкообразные искажения растра
39
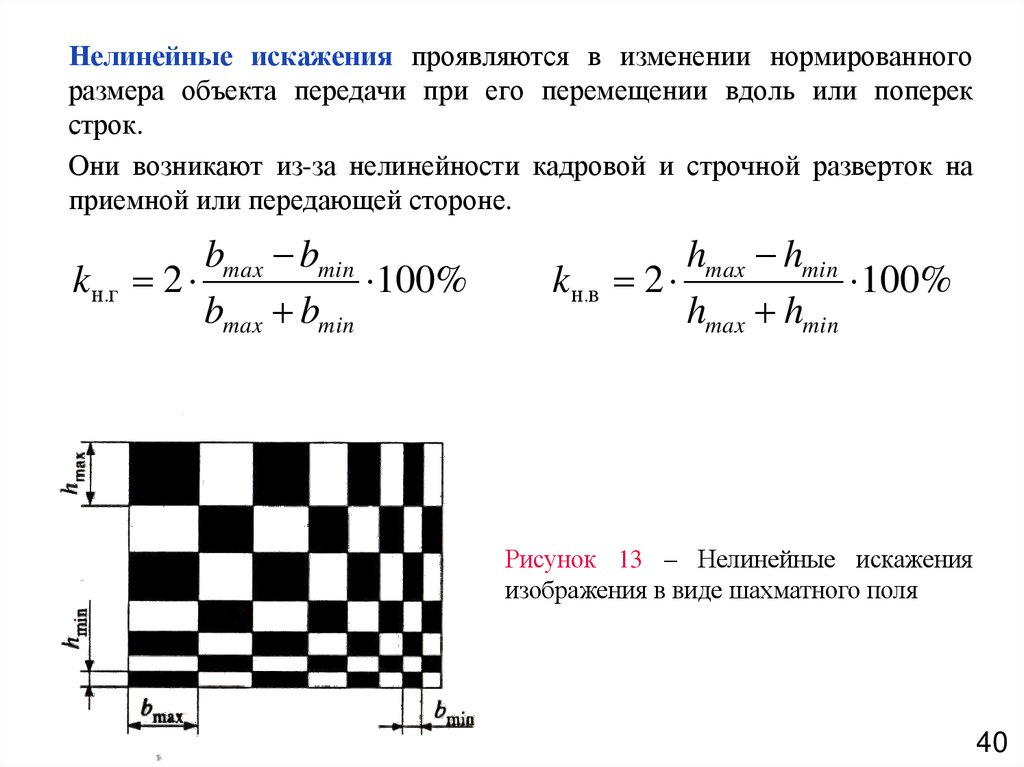
40.
Нелинейные искажения проявляются в изменении нормированногоразмера объекта передачи при его перемещении вдоль или поперек
строк.
Они возникают из-за нелинейности кадровой и строчной разверток на
приемной или передающей стороне.
bmax bmin
kн.г 2
100%
bmax bmin
hmax hmin
kн.в 2
100%
hmax hmin
Рисунок 13 – Нелинейные искажения
изображения в виде шахматного поля
40
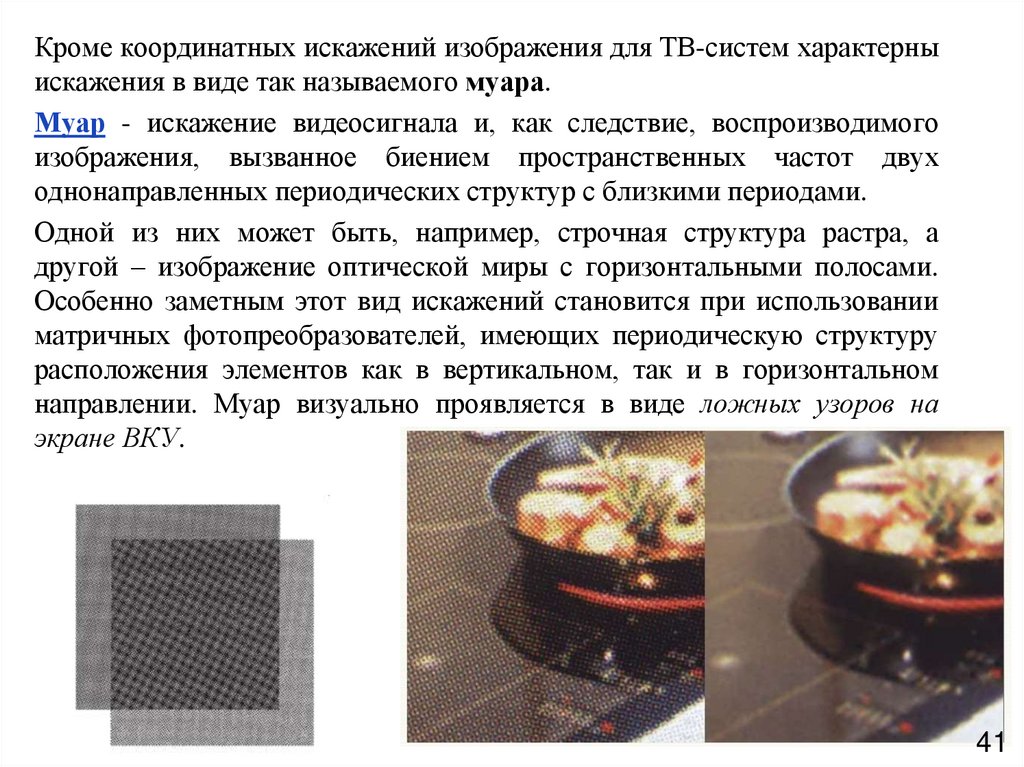
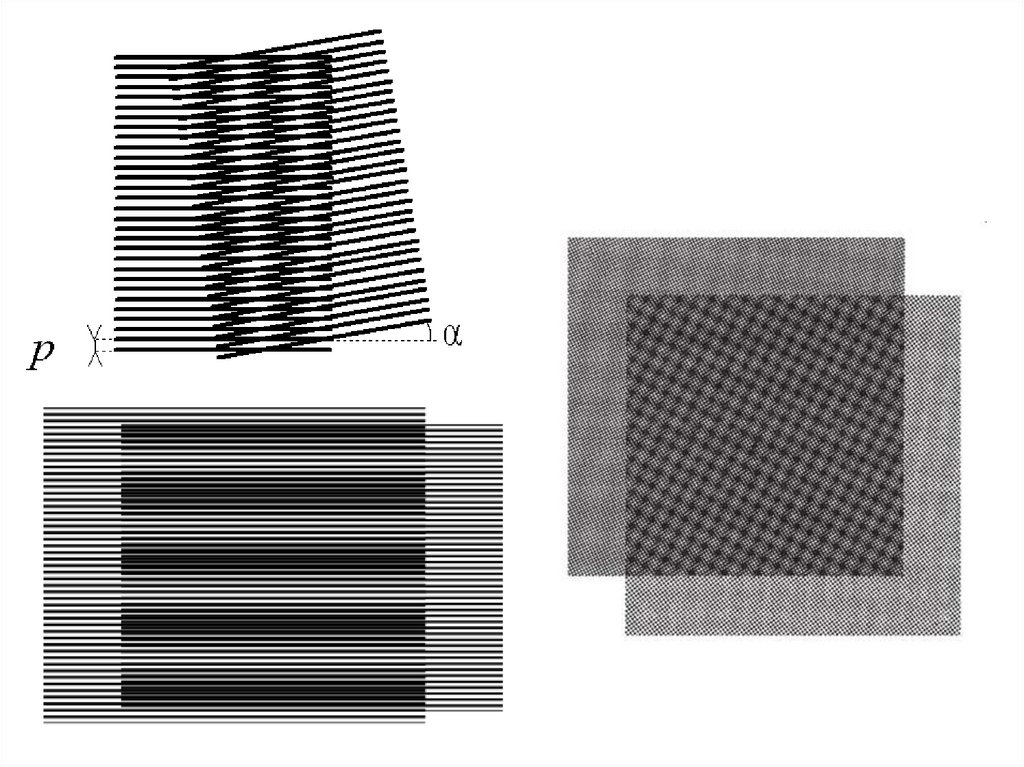
41.
Кроме координатных искажений изображения для ТВ-систем характерныискажения в виде так называемого муара.
Муар - искажение видеосигнала и, как следствие, воспроизводимого
изображения, вызванное биением пространственных частот двух
однонаправленных периодических структур с близкими периодами.
Одной из них может быть, например, строчная структура растра, а
другой – изображение оптической миры с горизонтальными полосами.
Особенно заметным этот вид искажений становится при использовании
матричных фотопреобразователей, имеющих периодическую структуру
расположения элементов как в вертикальном, так и в горизонтальном
направлении. Муар визуально проявляется в виде ложных узоров на
экране ВКУ.
41