


 industry
industrySimilar presentations:

")








Модернизация системы управления транспортного модуля сварочного автомата АССК 2502
1.
МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ОБРАЗОВАНИЯ
«МОСКОВСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ (МПУ)»
Выпуская квалификационная работа
на тему: «Модернизация системы управления транспортного модуля
сварочного автомата АССК 2502»
Студент-дипломник: Носков Антон Алексеевич
Руководитель работы: Бебенин Вячеслав Геннадьевич
МОСКВА 2019
2.
Цели и задачи ВКРЦель данного ВКР: уменьшения влияния человеческого фактора. Сварочное
оборудование оснащается автоматическим транспортным модулем для подачи изделия
на установку, тем самым увеличивается степень автоматизации сварочных процессов и
уменьшаются затраты и время на производство продукции.
Основными задачи проекта являются:
- выбор типа микроконтроллера;
- выбор датчиков;
- выбор двигателей;
- установка выбранных комплектующих на профиль Bosch;
- разработка алгоритма программы;
3.
Внешний вид АССК 2502Автомат типа АССК 2502 предназначен для электрической стыковой сварки герметичных
тепловыделяющих элементов (ТВЭЛов) с предварительным вакуумированием и заполнением
свариваемого изделия инертным газом.
На cварочном автомате АССК 2502 ранее отсутствовала автоматизированная система
управления транспортным модулем, процесс загрузки изделий проводился вручную.
4.
Выбор контроллера и блока питанияLOGO! фирмы Siemens.
Для нашего проекта мы выбрали контроллер LOGO!
24RCLB11, т.к он позволяет легко и удобно организовать
дискретное управление различными технологическими
процессами.
Выбранный контроллер LOGO! 24RCLВ11
представляет собой удлиненный вариант с 12 входами и 8
выходами типа «реле», рассчитанный на напряжение
питания 24В.
Для выбранного контроллера LOGO! 24RCLB11
был подобран блок питания Siemens LOGO! Power
24V/1,3A.
Стабилизированные блоки питания LOGO!
Power предназначены для питания логических модулей
LOGO!, их входных и выходных цепей, а также любых
других нагрузок.. В блоке питания существует
возможность регулировки уровня выходного
напряжения.
5.
Выбор датчиков для транспортногомодуля.
На транспортном модуле лучше использовать 3 датчика российской
фирмы ТЕКО, так как они, ничем не уступают в качестве и значительно
дешевле иностранных изделий.
Индуктивные датчики ТЕКО ВК EF4-31-Р-8-250 предназначены для
определения наличия изделия на расстоянии не более 8 мм от
чувствительной поверхности. Их принцип действия основан
взаимодействии магнитного поля катушки внутри датчика, и металла, из
которого состоит объект.
Для определения положения изделия на сварочном автомате АССК 2502
применяется датчик от фирмы SIEMENS BERO 3RG46 11-7AG01, что связано с
необходимостью установки малогабаритных датчиков, аналогов которых фирма
ТЕКО не выпускает.
Данный датчик обеспечивает экономичный метод бесконтактного
обнаружения металлических объектов.
6.
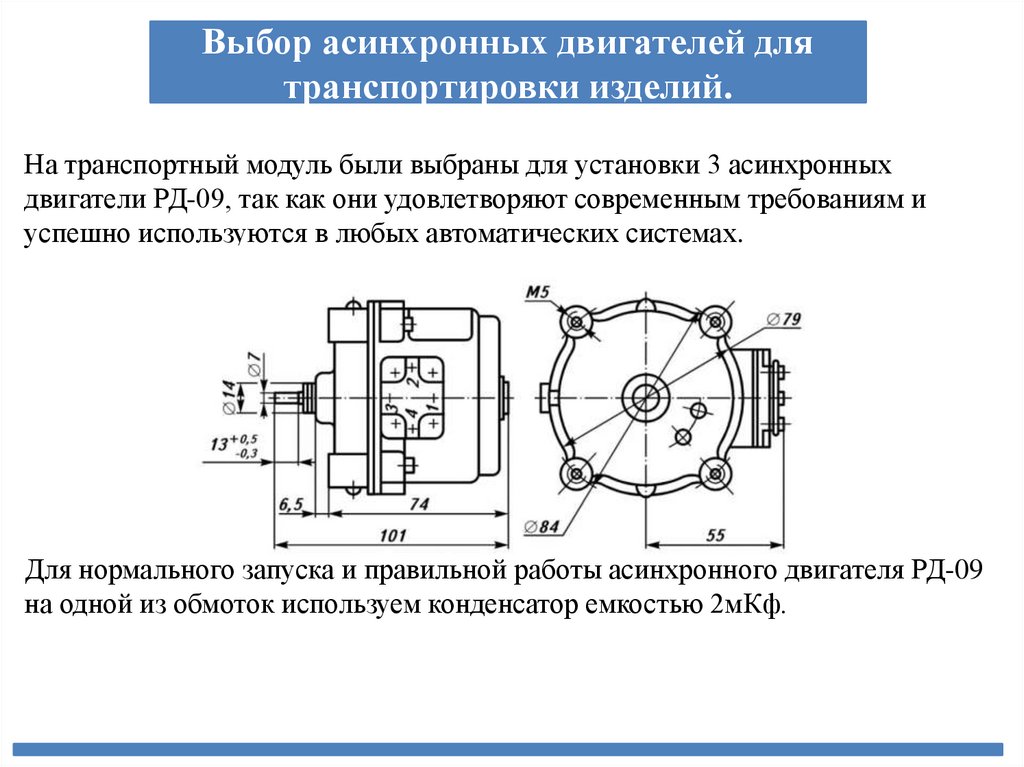
Выбор асинхронных двигателей длятранспортировки изделий.
На транспортный модуль были выбраны для установки 3 асинхронных
двигатели РД-09, так как они удовлетворяют современным требованиям и
успешно используются в любых автоматических системах.
Для нормального запуска и правильной работы асинхронного двигателя РД-09
на одной из обмоток используем конденсатор емкостью 2мКф.
7.
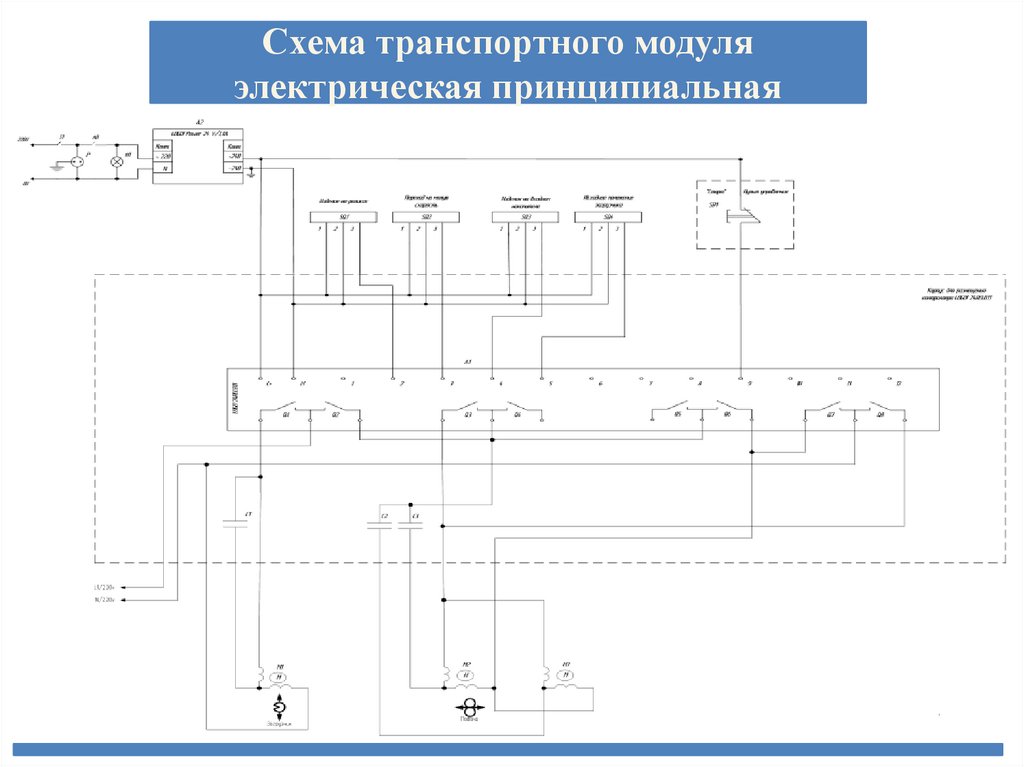
Схема транспортного модуляэлектрическая принципиальная
8.
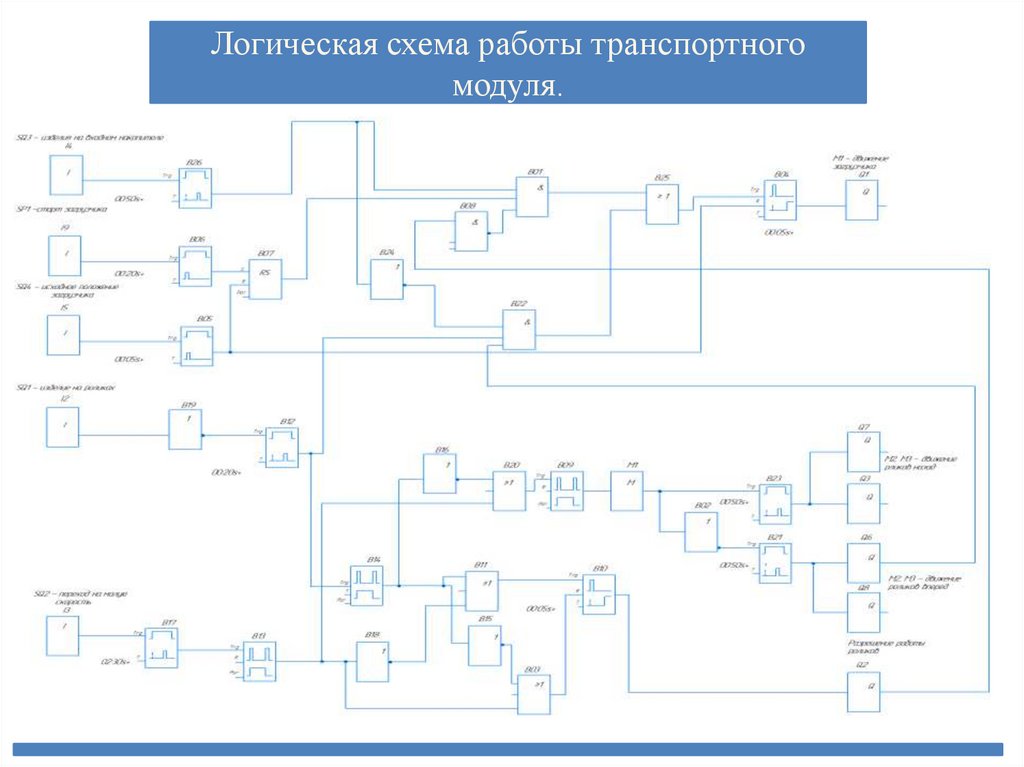
Логическая схема работы транспортногомодуля.
9.
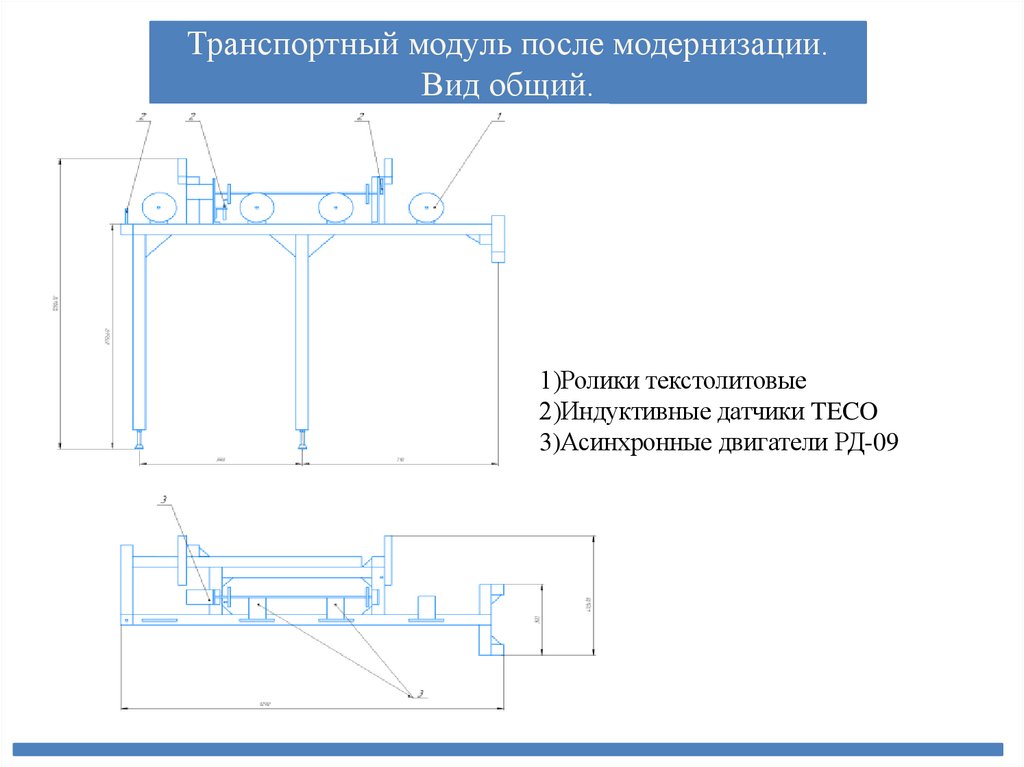
Транспортный модуль после модернизации.Вид общий.
1)Ролики текстолитовые
2)Индуктивные датчики TECO
3)Асинхронные двигатели РД-09
10.
Заключение.В выпускной квалификационной работе показана модернизация системы
управления транспортного модуля на сварочном автомате АССК 2502. Все
поставленные цели и задачи выполнены. Были разработаны отдельные узлы
системы, позволяющие добиться требуемых параметров управления, так же
разработана программа управления для полноценного функционирования
транспортного модуля. В результате модернизации произошло значительное
повышение производительности, после чего было принято решение о запуске
оборудования в промышленную эксплуатацию.