 software
softwareSimilar presentations:










Методическое и программное обеспечение лабораторного робототехнического комплекса
1.
Санкт-Петербургский Государственный Технологический Институт(Технический Университет)
Факультет: Информационных технологий и управления
Кафедра: Автоматизация процессов химической промышленности
Направление 15.03.04 Автоматизация технологических процессов и производств
Группа 412
Выпускная квалификационная работа
Тема: Методическое и программное обеспечение лабораторного
робототехнического комплекса
Обучающийся: Романов А.П.
Руководитель: доцент,
канд. техн. наук. Рудакова И.В.
Санкт-Петербург
2025
2.
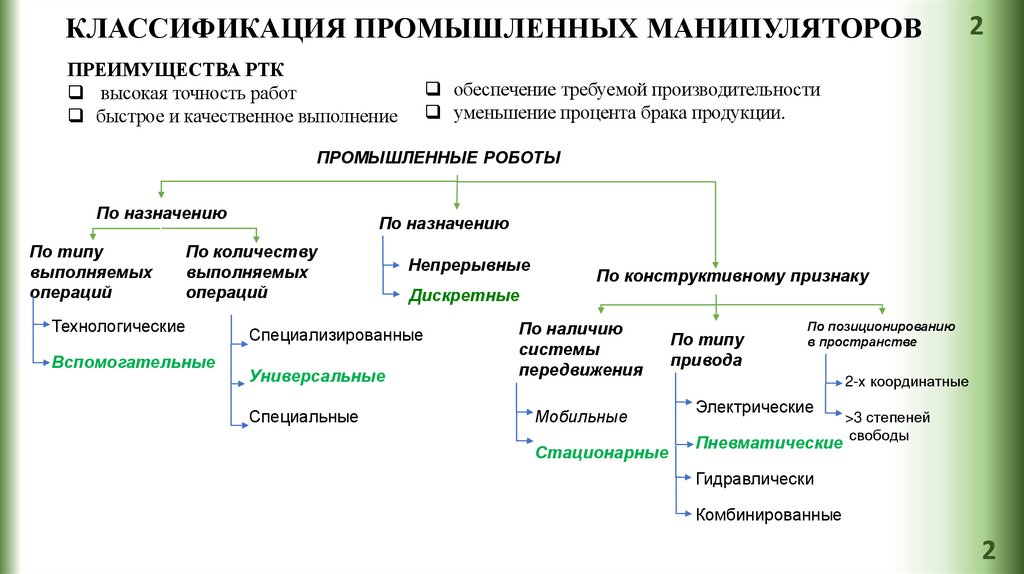
КЛАССИФИКАЦИЯ ПРОМЫШЛЕННЫХ МАНИПУЛЯТОРОВПРЕИМУЩЕСТВА РТК
высокая точность работ
быстрое и качественное выполнение
2
обеспечение требуемой производительности
уменьшение процента брака продукции.
ПРОМЫШЛЕННЫЕ РОБОТЫ
По назначению
По типу
выполняемых
операций
По назначению
По количеству
выполняемых
операций
Технологические
Вспомогательные
Непрерывные
Дискретные
Специализированные
Универсальные
Специальные
По конструктивному признаку
По наличию
системы
передвижения
Мобильные
Стационарные
По типу
привода
По позиционированию
в пространстве
2-х координатные
Электрические
Пневматические
>3 степеней
свободы
Гидравлически
Комбинированные
2
3.
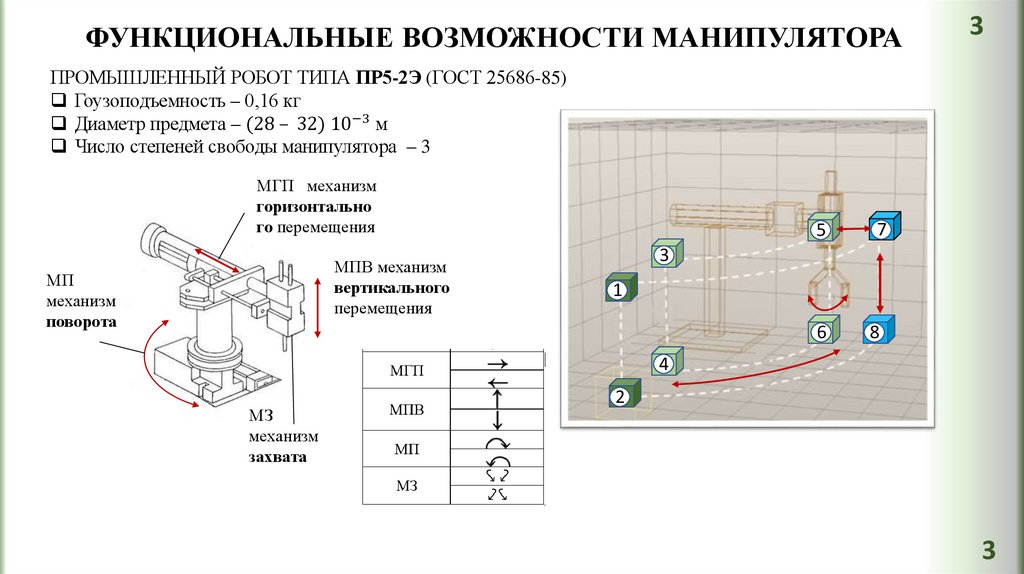
ФУНКЦИОНАЛЬНЫЕ ВОЗМОЖНОСТИ МАНИПУЛЯТОРА3
ПРОМЫШЛЕННЫЙ РОБОТ ТИПА ПР5-2Э (ГОСТ 25686-85)
Гоузоподъемность – 0,16 кг
Диаметр предмета – (28 – 32) 10−3 м
Число степеней свободы манипулятора – 3
МГП механизм
горизонтально
го перемещения
МПВ механизм
вертикального
перемещения
МП
механизм
поворота
5
7
6
8
3
1
4
МЗ
механизм
захвата
2
3
4.
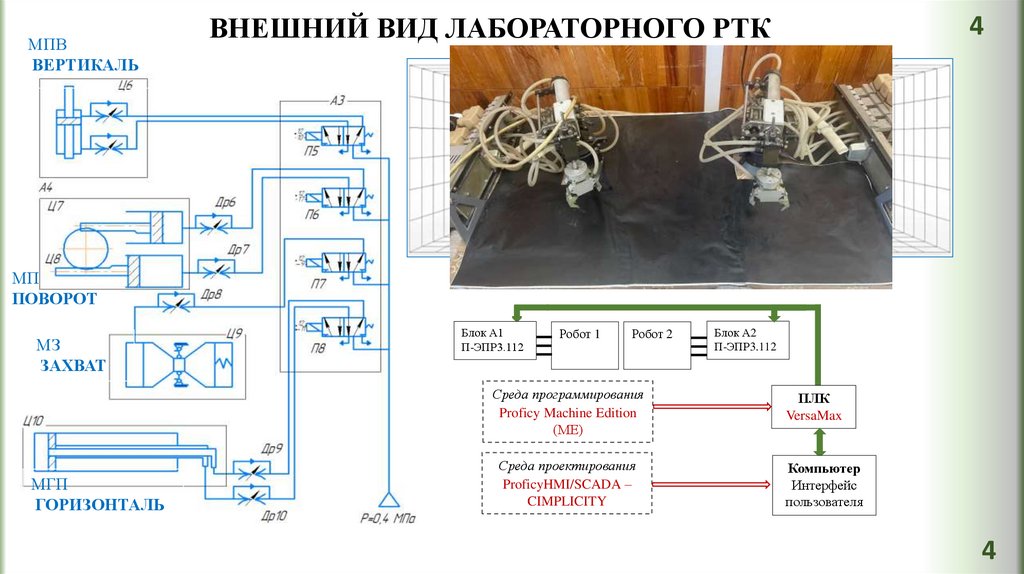
МПВВЕРТИКАЛЬ
ВНЕШНИЙ ВИД ЛАБОРАТОРНОГО РТК
1 3
4
2
5
6
01
02
5’
6’
4
3’
1’
4’ 2’
МП
ПОВОРОТ
МЗ
ЗАХВАТ
МГП
ГОРИЗОНТАЛЬ
Блок А1
П-ЭПР3.112
Робот 1
Робот 2
Блок А2
П-ЭПР3.112
Среда программирования
Proficy Machine Edition
(МЕ)
ПЛК
VersaMax
Среда проектирования
ProficyHMI/SCADA –
CIMPLICITY
Компьютер
Интерфейс
пользователя
4
5.
ЦЕЛЬ И ЗАДАЧИ5
ЦЕЛЬ
Разработка системы управления лабораторным робототехническим комплексом на базе
доступного технического обеспечения и программирование его на открытом
программном обеспечении.
ЗАДАЧИ
1 Изучение существующего технического, программного и методического
обеспечения лабораторной установки по программированию РТК и замена
составляющих, затрудняющих эксплуатацию комплекса.
2 Корректировка проектной документации и монтаж новых компонентов
лабораторного стенда
3 Разработка и отладка интерфейса пользователя, реализующего этапы ручного
управления манипулятором и программирование системы совместной работы двух
манипуляторов.
5
6.
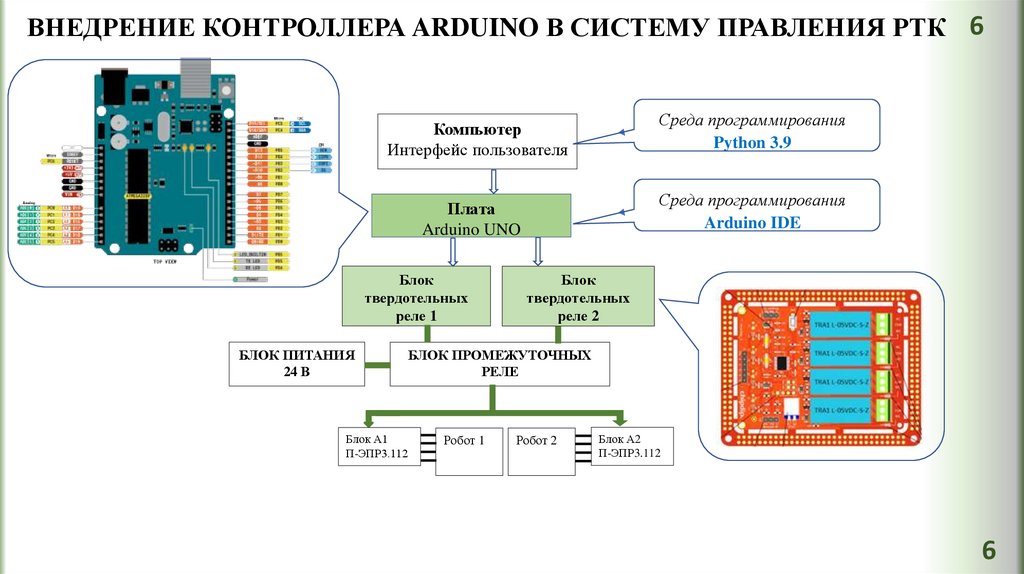
ВНЕДРЕНИЕ КОНТРОЛЛЕРА ARDUINO В СИСТЕМУ ПРАВЛЕНИЯ РТК 6Компьютер
Интерфейс пользователя
Среда программирования
Python 3.9
Плата
Arduino UNO
Среда программирования
Arduino IDE
Блок
твердотельных
реле 1
БЛОК ПИТАНИЯ
24 В
Блок А1
П-ЭПР3.112
Блок
твердотельных
реле 2
БЛОК ПРОМЕЖУТОЧНЫХ
РЕЛЕ
Робот 1
Робот 2
Блок А2
П-ЭПР3.112
6
7.
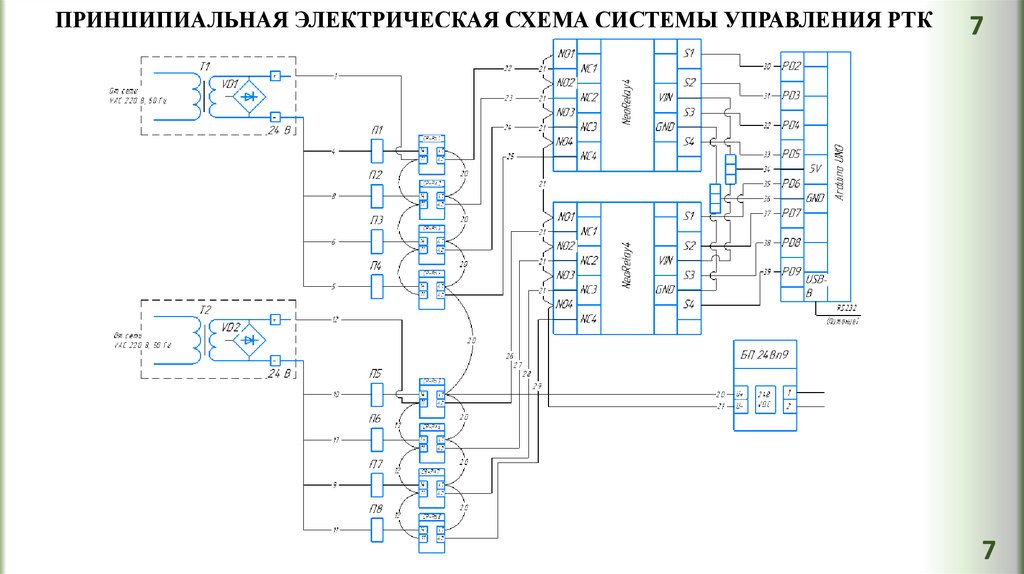
ПРИНЦИПИАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ СХЕМА СИСТЕМЫ УПРАВЛЕНИЯ РТК7
7
8.
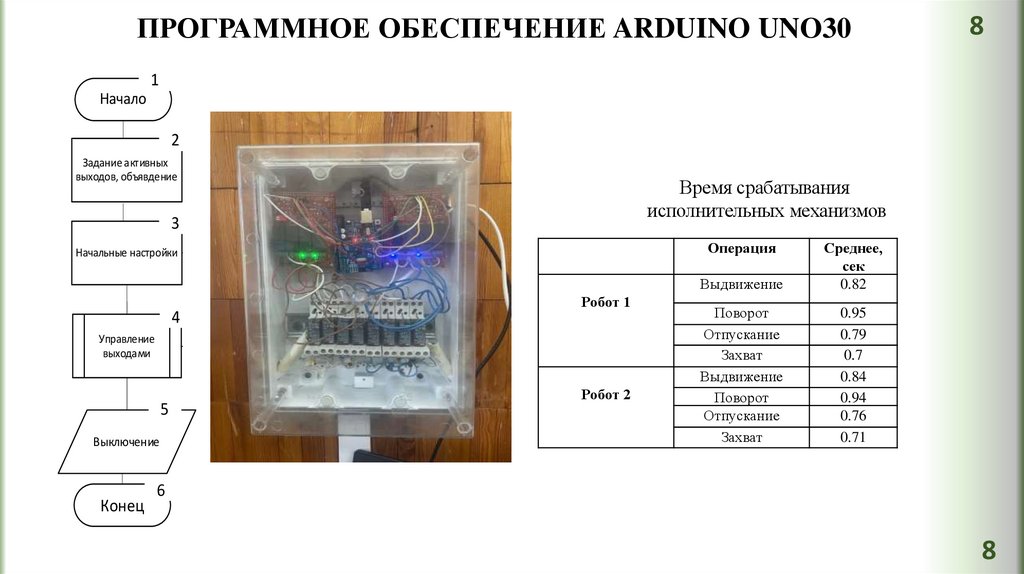
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ ARDUINO UNO308
1
Начало
2
Задание активных
выходов, объявдение
3
Начальные настройки
Настройка режимов портов.
Проверка состояний реле.
Установка скорости последовательного
порта.
Операция
Робот 1
4
Чтение внешних команд.
Переключение дискретных выходов.
Управление
выходами
5
Выключение
Конец
Время срабатывания
исполнительных механизмов
Робот 2
Выдвижение
Среднее,
сек
0.82
Поворот
Отпускание
Захват
Выдвижение
Поворот
Отпускание
Захват
0.95
0.79
0.7
0.84
0.94
0.76
0.71
6
8
9.
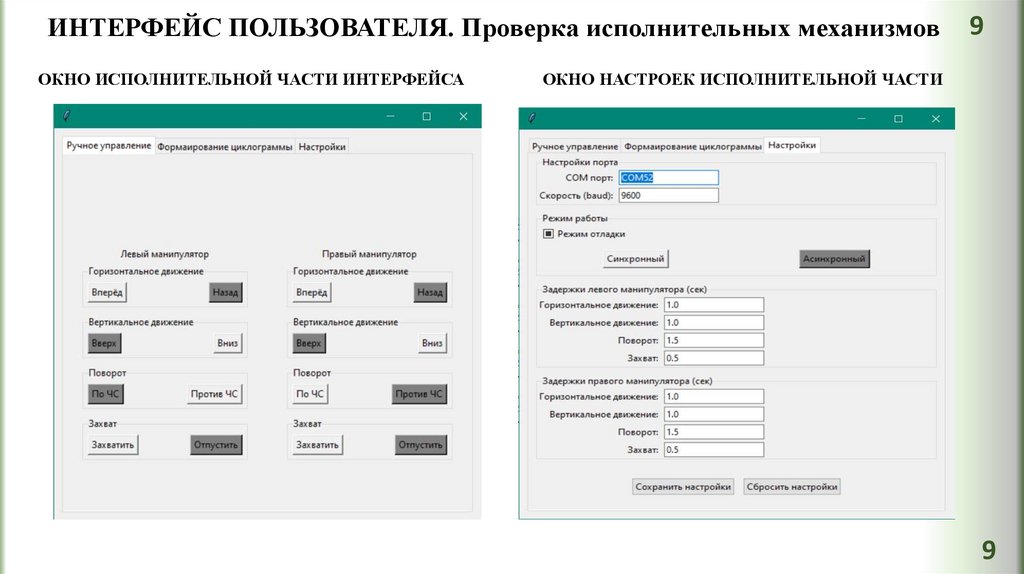
ИНТЕРФЕЙС ПОЛЬЗОВАТЕЛЯ. Проверка исполнительных механизмовОКНО ИСПОЛНИТЕЛЬНОЙ ЧАСТИ ИНТЕРФЕЙСА
9
ОКНО НАСТРОЕК ИСПОЛНИТЕЛЬНОЙ ЧАСТИ
9
10.
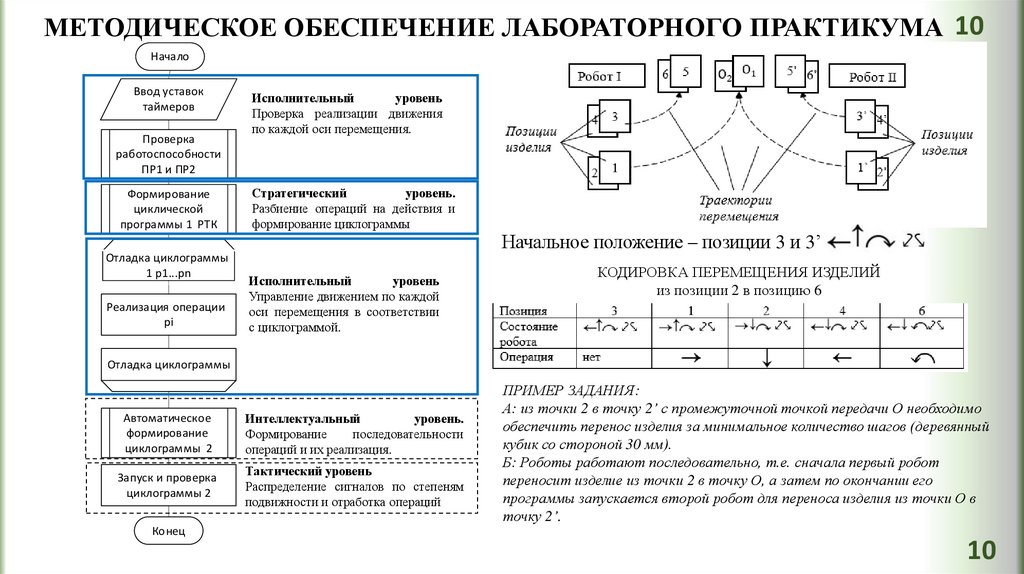
МЕТОДИЧЕСКОЕ ОБЕСПЕЧЕНИЕ ЛАБОРАТОРНОГО ПРАКТИКУМА 10Начало
Ввод уставок
таймеров
Проверка
работоспособности
ПР1 и ПР2
Формирование
циклической
программы 1 РТК
Отладка циклограммы
1 р1...рn
Реализация операции
рi
Исполнительный
уровень
Проверка реализации движения
по каждой оси перемещения.
Стратегический
уровень.
Разбиение операций на действия и
формирование циклограммы
Исполнительный
уровень
Управление движением по каждой
оси перемещения в соответствии
с циклограммой.
Начальное положение – позиции 3 и 3’ ()
КОДИРОВКА ПЕРЕМЕЩЕНИЯ ИЗДЕЛИЙ
из позиции 2 в позицию 6
Отладка циклограммы
Автоматическое
формирование
циклограммы 2
Интеллектуальный
уровень.
Формирование
последовательности
операций и их реализация.
Запуск и проверка
циклограммы 2
Тактический уровень
Распределение сигналов по степеням
подвижности и отработка операций
Конец
ПРИМЕР ЗАДАНИЯ:
А: из точки 2 в точку 2’ с промежуточной точкой передачи О необходимо
обеспечить перенос изделия за минимальное количество шагов (деревянный
кубик со стороной 30 мм).
Б: Роботы работают последовательно, т.е. сначала первый робот
переносит изделие из точки 2 в точку О, а затем по окончании его
программы запускается второй робот для переноса изделия из точки О в
точку 2’.
10
11.
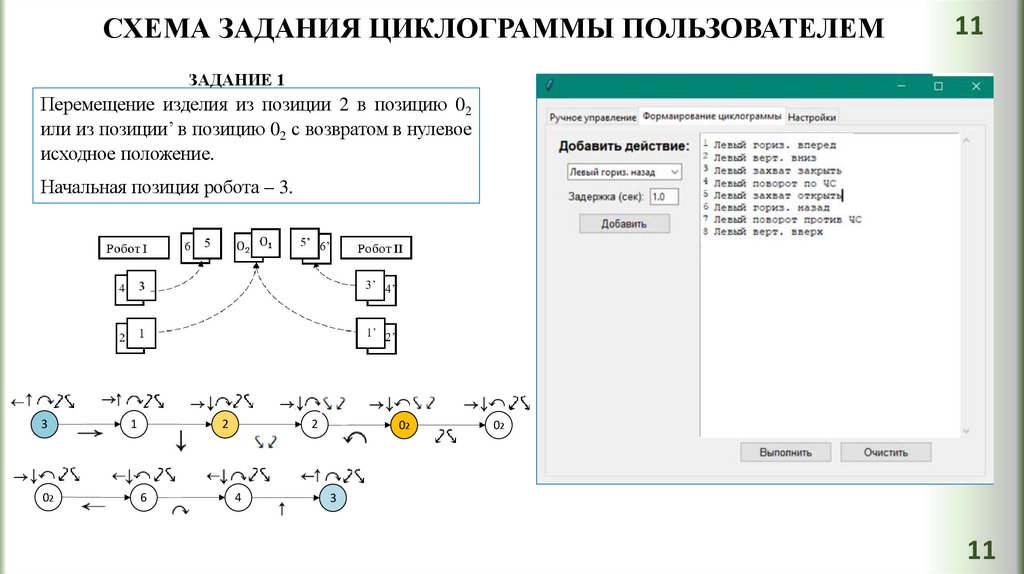
СХЕМА ЗАДАНИЯ ЦИКЛОГРАММЫ ПОЛЬЗОВАТЕЛЕМ11
ЗАДАНИЕ 1
Перемещение изделия из позиции 2 в позицию 02
или из позиции’ в позицию 02 с возвратом в нулевое
исходное положение.
Начальная позиция робота – 3.
3
02
1
2
6
2
4
02
02
3
11
12.
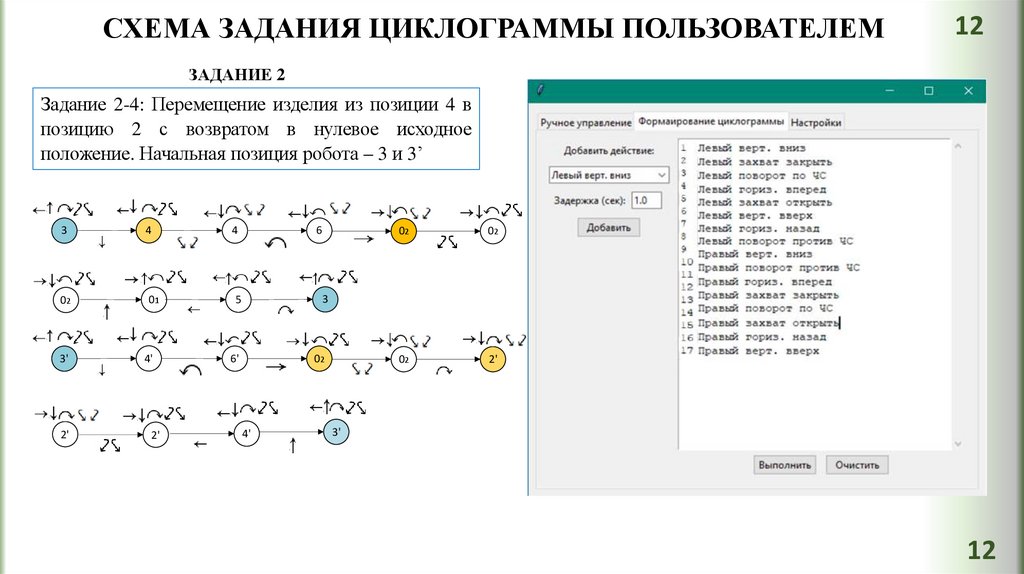
СХЕМА ЗАДАНИЯ ЦИКЛОГРАММЫ ПОЛЬЗОВАТЕЛЕМ12
ЗАДАНИЕ 2
Задание 2-4: Перемещение изделия из позиции 4 в
позицию 2 с возвратом в нулевое исходное
положение. Начальная позиция робота – 3 и 3’
3
4
4
6
02
01
5
3
3'
4'
6'
02
2'
2'
4'
02
02
02
2'
3'
12
13.
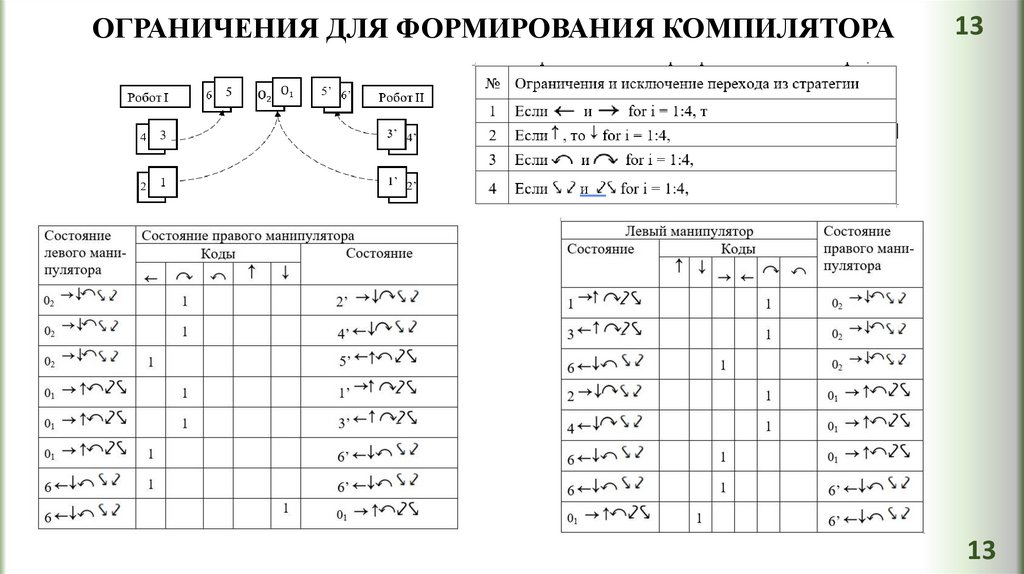
ОГРАНИЧЕНИЯ ДЛЯ ФОРМИРОВАНИЯ КОМПИЛЯТОРА13
13
14.
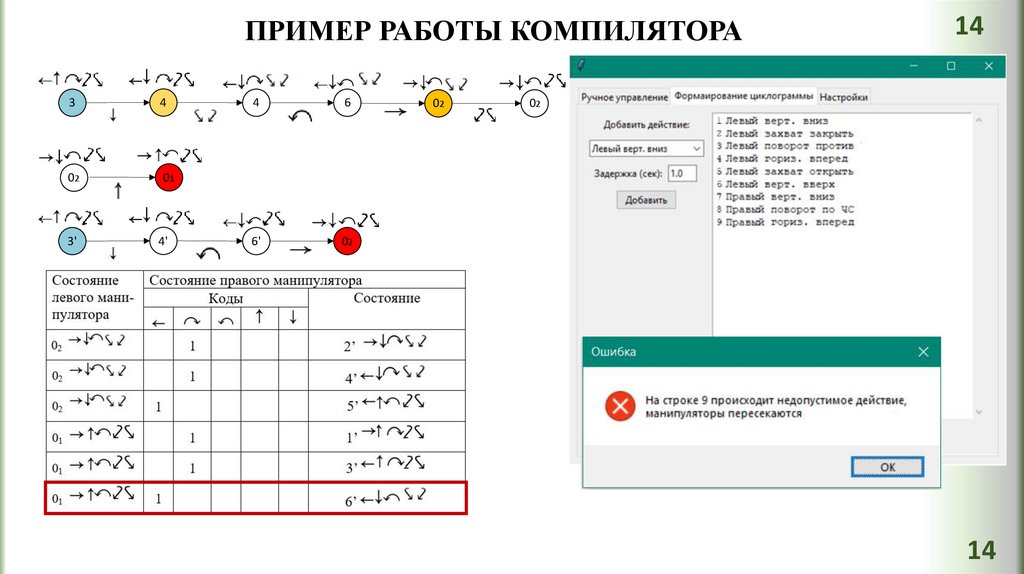
ПРИМЕР РАБОТЫ КОМПИЛЯТОРА3
4
02
01
3'
4'
4
6
6'
02
02
14
02
14
15.
ВЫВОДЫ15
1 Выполнен обзор технического обеспечения внедряемых в промышленность и
устанавливаемых на тренажерных стендах легких манипуляторов. Показана
актуальность применение легких манипуляторов в промышленности.
2 Выбрана рациональная замена технической части системы управления
лабораторного РТК с открытым программным обеспечением на основе Arduino.
3 Выполнен перемонтаж лабораторного стенда и протестировано разработанное
программное обеспечение.
4 Разработана система визуализации и дистанционного управления, в которую
заложены сформированные ранее методические задачи по синхронизации работы двух
роботов.
15