








 programming
programmingSimilar presentations:










Swarm navigation with formation control. Contents
1. Swarm navigation with formation control
Supervised by Ruben ContrerasSWARM NAVIGATION WITH
FORMATION CONTROL
Group MEMBERS
Florian MUANDA
Jorge MEDINA
Shakirova ELZA
2. CONTENTS
• Topic (definition and areas ofapplications)
• Problem statement
• Methodology
• Hardware requirements
• Software requirements
3. TOPIC
• Robots navigate whilemaintaining a formation
(line, triangle, V-shape),
avoiding obstacles.
4.
5.
WHAT IS SWARM NAVIGATIONWITH FORMATION CONTROL?
It refers to coordinating multiple autonomous robots to move cohesively as a group
while maintaining a specific geometric formation, in our case, a Triangle, line, and Vshape, and simultaneously avoiding obstacles.
6.
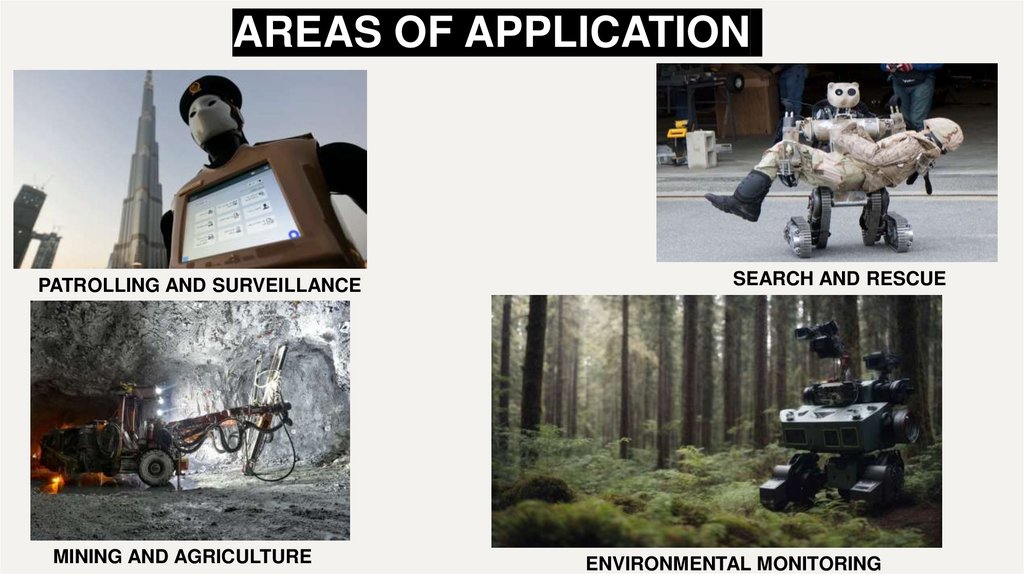
AREAS OF APPLICATIONPATROLLING AND SURVEILLANCE
MINING AND AGRICULTURE
SEARCH AND RESCUE
ENVIRONMENTAL MONITORING
7. PROBLEM STATEMENT
Design and implement a multi-robot system using TurtleBot3robots that can autonomously navigate in a shared environment
while maintaining a predefined formation (e.g., line, triangle, Vshape), and dynamically avoid obstacles without losing
coordination or colliding, in both simulated and real-world
environments.
8. METHODOLOGY
METHODOLOGY
System Setup
Simulation Environment
Configure multiple TurtleBot3 robots
with ROS Noetic and establish network
communication using namespaces
Use Gazebo to test robot behaviors
Inter-Robot
Exchange
positions or goals using
Communication
ROS topics or shared transform
frames for coordination
Testing and Evaluation
Validate in simulation and then
deploy to real TurtleBots
Obstacle avoidance
Use LIDAR data and move_base to
detect and avoid obstacles
dynamically while preserving form
Map building and Localization
Generate a map using gmapping or
slam_toolbox and deploy AMCL for
localization
Formation Control Design
Implement a custom ROS node to
maintain a specific formation and
calculate relative positions
9. Hardware requirements
- Turtle3 Burger- Raspberry Pi 3 (to run ROS, handles sensor data,
control logic, and navigation stack)
- Microcontroller, controls motors, and interfaces with lowlevel sensors and communicates with Raspberry Pi via
USB
HARDWARE
REQUIREMENTS - Wheel encoders, used for odometry
- IMU (OpenCR) for orientation and motion estimation
- LIDAR for mapping and obstacle avoidance
- Power supply, Lion-battery to power Raspberry Pi and
OpenCR
10. SOFTWARE REQUIREMENTS
SoftwarePurpose
Ubuntu 20.04
Most compatible with ROS Noetic
ROS
ros-core
ros-base
ros-noetic-desktop-full
For development with visualization and simulation tools
TurtleBot3 software packages
For simulation
Navigation and Mapping
amcl - Adaptative Monte Carlo Localization
Gmapping for SLAM
Multirobot support
tf / tf2 – For coordinate transformations
Communication and Networking
ROS tools : rosmaster, rosnode, rostopic, roslaunch
Visualizing and debugging
Rviz – visualization of robot state, map and path
Rqt_graph – Node/topic graph visualization
Rqt_console, rqt_plot – Debugging and telemetry
Programming Language
Python/Java
Simulation
Gazebo-ros, turtlebot3_gazebo, .xacro, ros_control