

 electronics
electronicsSimilar presentations:










Типовые элементы и устройств систем автоматизации
1. Экзаменационная работа Типовые элементы и устройств систем автоматизации Определение закона регулирования и оптимальных
настроечных параметров для нейтрального объектас запаздыванием
Специальность 15.02.14 Оснащение
средствами автоматизации
технологических процессов и производств
(по отраслям)
Группа ОСА-02
Разработал: Юркин С.П.
2. Введение
• Автоматизация является однимиз ключевых факторов,
определяющих современное
развитие промышленности и
технологий. В условиях
стремительного прогресса и
глобальной конкуренции
предприятия сталкиваются с
необходимостью повышения
эффективности своих процессов,
улучшения качества продукции и
снижения затрат. Автоматизация
предоставляет уникальные
возможности для достижения этих
целей, позволяя интегрировать
современные технологии в
производственные цепочки и
оптимизировать рабочие
3.
ОСНОВНЫЕ ПОНЯТИЯО РЕГУЛЯТОРАХ
• Регулятор — это устройство или система,
предназначенная для поддержания
определённого параметра объекта
управления в заданном состоянии. Он
получает информацию от датчиков,
сравнивает фактические значения с
заданными и в случае необходимости вносит
коррективы для достижения желаемого
результата.
• Закон регулирования — это принцип,
который описывает зависимость
перемещения регулирующего органа от
отклонения регулируемой переменной.
4.
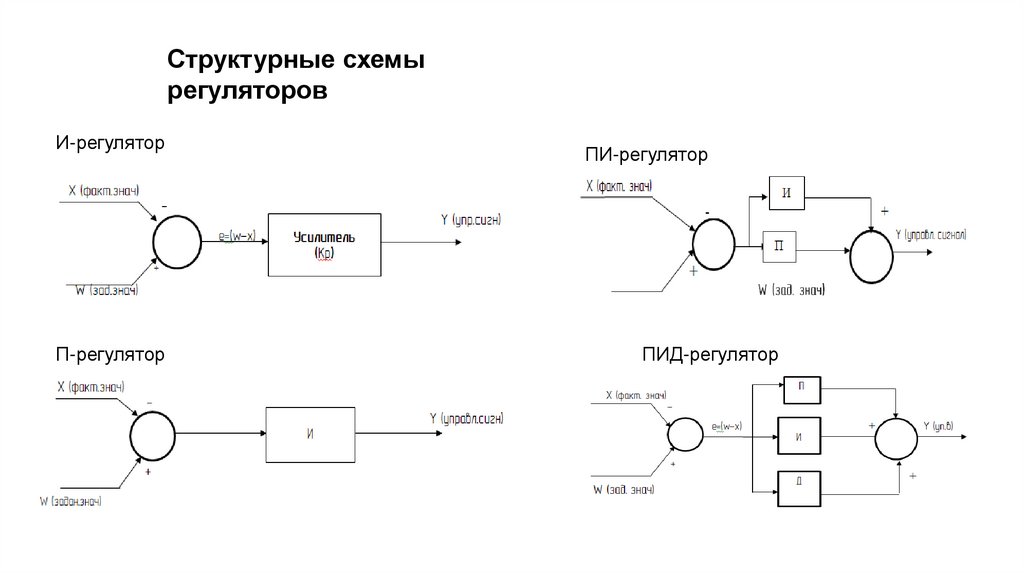
Структурные схемырегуляторов
И-регулятор
П-регулятор
ПИ-регулятор
ПИД-регулятор
5.
ВЫБОР ТИПА РЕГУЛЯТОРА СОГЛАСНОИНДИВИДУАЛЬНОМУ ЗАДАНИЮ
• Цель работы: необходимо определить оптимальные настроичные параметры регулятора и выбрать его
тип для следующих условий:
• Объект: нейтральный, 1-го порядка, с 20% перерегулированием;
• Параметры объекта:
• Время разгона, Te = 125 секунд;
• Время запаздывания, t = 35 секунд.
• Динамическая ошибка регулирования, y1доп = 0,19;
• Статическяа ошибка регулирования,yст.доп. = 0,09;
• Время регулирования,tpдоп = 600 секунд;
• Регулирующее воздействие, соответствующее максимальному изменению возмущения, xв = 0,16.
6.
Ориентировочное определение характерадействия регулятора по отношению
7.
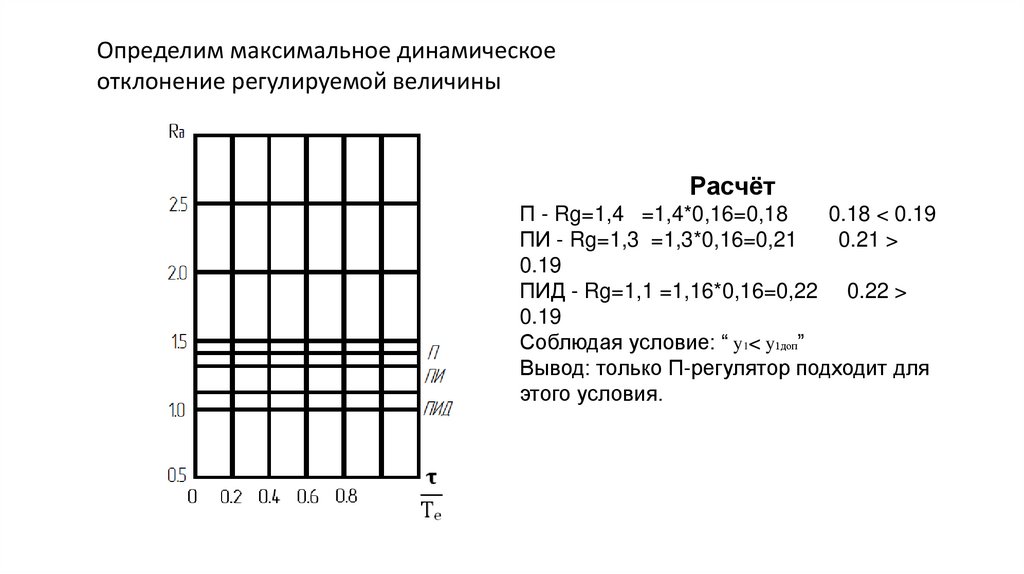
Определим максимальное динамическоеотклонение регулируемой величины
Расчёт
П - Rg=1,4 =1,4*0,16=0,18
0.18 < 0.19
ПИ - Rg=1,3 =1,3*0,16=0,21
0.21 >
0.19
ПИД - Rg=1,1 =1,16*0,16=0,22 0.22 >
0.19
Соблюдая условие: “ y1< y1доп”
Вывод: только П-регулятор подходит для
этого условия.
8.
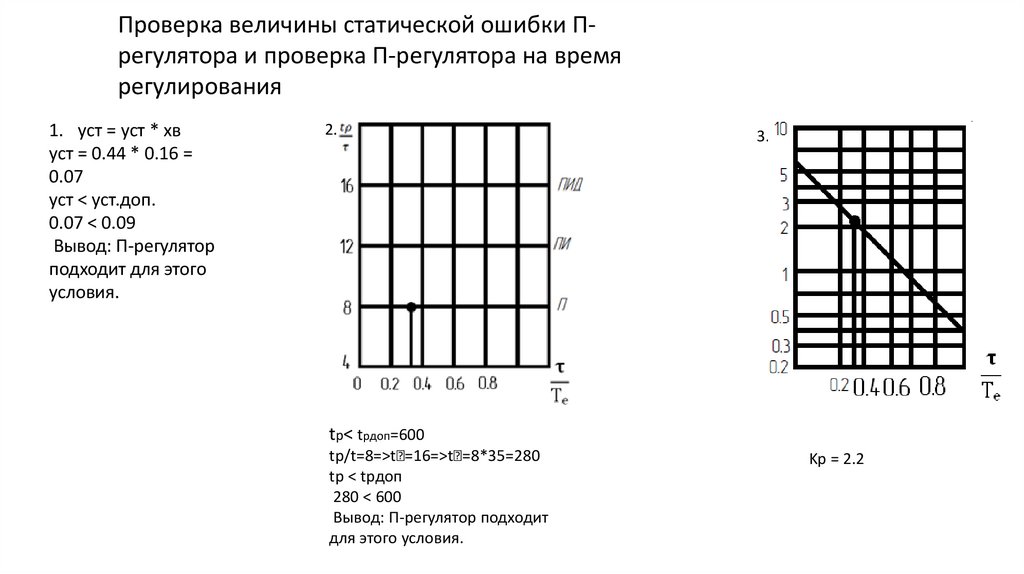
Проверка величины статической ошибки Прегулятора и проверка П-регулятора на времярегулирования
1. yст = yст * xв
yст = 0.44 * 0.16 =
0.07
yст < yст.доп.
0.07 < 0.09
Вывод: П-регулятор
подходит для этого
условия.
2.
3.
tp< tpдоп=600
tp/t=8=>tₚ=16=>tₚ=8*35=280
tp < tpдоп
280 < 600
Вывод: П-регулятор подходит
для этого условия.
Kp = 2.2